高斯滤波与移动平均滤波器的adcole测量仪上的比较
- 格式:pdf
- 大小:225.43 KB
- 文档页数:4
DeltaSigma模数转换器(ADC_DelSig)简介DeltaSigma模数转换器,又称为ADC_DelSig(Analog-to-Digital Converter Delta-Sigma),是一种高精度的模数转换器。
它采用了DeltaSigma调制技术,通过高速采样和数字滤波来实现高分辨率和低噪声的模数转换。
工作原理DeltaSigma模数转换器的工作原理基于DeltaSigma调制技术。
其核心思想是将输入信号与一个高频的比较器相比较,并将比较器的输出结果经过滤波器处理后转换成数字信号。
具体来说,DeltaSigma模数转换器包括一个模数转换器和一个数字滤波器。
1.比较器:比较器将输入信号与参考电压进行比较,并输出一个高频PWM(脉宽调制)信号。
比较器的输出频率远高于所需的转换速率,通常在MHz级别。
2.数字滤波器:PWM信号经过数字滤波器,滤波器根据PWM信号的占空比来判断输入信号的大小。
滤波器输出的数字信号经过采样并进行数字编码,就得到了转换后的数字输出。
优点和应用DeltaSigma模数转换器具有很多优点,主要包括以下几个方面:1.高分辨率:DeltaSigma模数转换器具有非常高的分辨率,通常可以达到16位以上,甚至更高。
这使得它在需要高精度数据转换的应用中非常有用,如音频处理、医疗设备和测量仪器等。
2.低噪声:DeltaSigma模数转换器通过在输入端引入噪声抑制电路和高速数字滤波器,可以有效降低系统的噪声水平。
这使得它在对信号质量要求较高的应用中具有优势,如音频信号处理和高速数据采集等。
3.较低的成本:DeltaSigma模数转换器通常采用CMOS工艺制造,因此成本相对较低。
这使得它在大规模集成电路中应用广泛,并且具有较高的性价比。
DeltaSigma模数转换器广泛应用于各个领域,包括但不限于以下几个方面:•音频信号处理:DeltaSigma模数转换器在音频设备中被广泛应用,如音频采样、音频编码和数字音频处理等。
图像滤波之⾼斯滤波介绍1 ⾼斯滤波简介 了解⾼斯滤波之前,我们⾸先熟悉⼀下⾼斯噪声。
⾼斯噪声是指它的服从(即)的⼀类噪声。
如果⼀个噪声,它的幅度分布服从⾼斯分布,⽽它的⼜是均匀分布的,则称它为⾼斯⽩噪声。
⾼斯⽩噪声的⼆阶矩不相关,⼀阶矩为,是指先后信号在时间上的相关性,包括和。
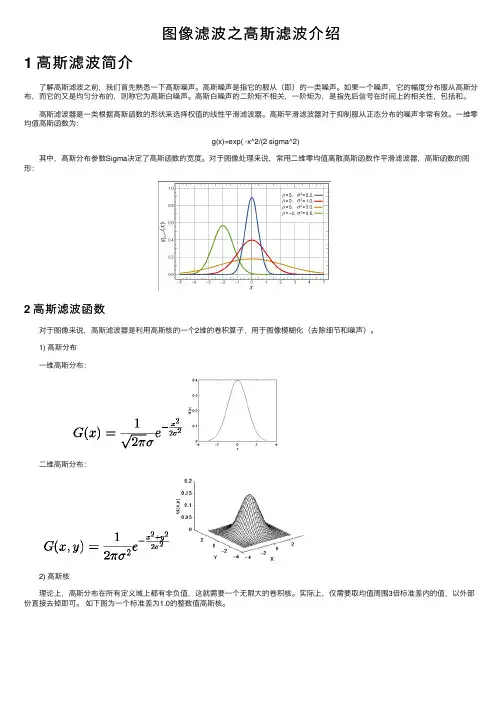
⾼斯滤波器是⼀类根据⾼斯函数的形状来选择权值的线性平滑滤波器。
⾼斯平滑滤波器对于抑制服从正态分布的噪声⾮常有效。
⼀维零均值⾼斯函数为: g(x)=exp( -x^2/(2 sigma^2) 其中,⾼斯分布参数Sigma决定了⾼斯函数的宽度。
对于图像处理来说,常⽤⼆维零均值离散⾼斯函数作平滑滤波器,⾼斯函数的图形:2 ⾼斯滤波函数 对于图像来说,⾼斯滤波器是利⽤⾼斯核的⼀个2维的卷积算⼦,⽤于图像模糊化(去除细节和噪声)。
1) ⾼斯分布 ⼀维⾼斯分布: ⼆维⾼斯分布: 2) ⾼斯核 理论上,⾼斯分布在所有定义域上都有⾮负值,这就需要⼀个⽆限⼤的卷积核。
实际上,仅需要取均值周围3倍标准差内的值,以外部份直接去掉即可。
如下图为⼀个标准差为1.0的整数值⾼斯核。
3 ⾼斯滤波性质 ⾼斯函数具有五个重要的性质,这些性质使得它在早期图像处理中特别有⽤.这些性质表明,⾼斯平滑滤波器⽆论在空间域还是在频率域都是⼗分有效的低通滤波器,且在实际图像处理中得到了⼯程⼈员的有效使⽤.⾼斯函数具有五个⼗分重要的性质,它们是: (1)⼆维⾼斯函数具有旋转对称性,即滤波器在各个⽅向上的平滑程度是相同的.⼀般来说,⼀幅图像的边缘⽅向是事先不知道的,因此,在滤波前是⽆法确定⼀个⽅向上⽐另⼀⽅向上需要更多的平滑.旋转对称性意味着⾼斯平滑滤波器在后续边缘检测中不会偏向任⼀⽅向. (2)⾼斯函数是单值函数.这表明,⾼斯滤波器⽤像素邻域的加权均值来代替该点的像素值,⽽每⼀邻域像素点权值是随该点与中⼼点的距离单调增减的.这⼀性质是很重要的,因为边缘是⼀种图像局部特征,如果平滑运算对离算⼦中⼼很远的像素点仍然有很⼤作⽤,则平滑运算会使图像失真. (3)⾼斯函数的傅⽴叶变换频谱是单瓣的.正如下⾯所⽰,这⼀性质是⾼斯函数付⽴叶变换等于⾼斯函数本⾝这⼀事实的直接推论.图像常被不希望的⾼频信号所污染(噪声和细纹理).⽽所希望的图像特征(如边缘),既含有低频分量,⼜含有⾼频分量.⾼斯函数付⽴叶变换的单瓣意味着平滑图像不会被不需要的⾼频信号所污染,同时保留了⼤部分所需信号. (4)⾼斯滤波器宽度(决定着平滑程度)是由参数σ表征的,⽽且σ和平滑程度的关系是⾮常简单的.σ越⼤,⾼斯滤波器的频带就越宽,平滑程度就越好.通过调节平滑程度参数σ,可在图像特征过分模糊(过平滑)与平滑图像中由于噪声和细纹理所引起的过多的不希望突变量(⽋平滑)之间取得折衷. (5)由于⾼斯函数的可分离性,较⼤尺⼨的⾼斯滤波器可以得以有效地实现.⼆维⾼斯函数卷积可以分两步来进⾏,⾸先将图像与⼀维⾼斯函数进⾏卷积,然后将卷积结果与⽅向垂直的相同⼀维⾼斯函数卷积.因此,⼆维⾼斯滤波的计算量随滤波模板宽度成线性增长⽽不是成平⽅增长.4 ⾼斯滤波应⽤ ⾼斯滤波后图像被平滑的程度取决于标准差。
matlab 高斯滤波的点数-概述说明以及解释1.引言1.1 概述高斯滤波是一种常用的图像滤波方法,其基本原理是通过对图像中的每个像素点周围的像素值进行加权平均,从而达到平滑图像的效果。
与其他滤波方法相比,高斯滤波具有较好的平滑效果和保持图像细节的能力。
因此,在图像处理、计算机视觉和模式识别等领域被广泛应用。
本文旨在探讨高斯滤波中滤波器的点数对滤波效果的影响。
高斯滤波器的点数是指滤波器的大小,即滤波器矩阵的行列数。
常见的滤波器大小有3x3、5x5、7x7等不同的尺寸。
不同的滤波器大小会使高斯滤波的平滑效果和处理速度有所变化,因此选择合适的滤波器大小对于实际应用非常重要。
在正文部分,我们将介绍高斯滤波的原理及其应用领域。
随后,我们将着重探讨高斯滤波中滤波器大小的参数设置以及其对滤波效果的影响。
进一步地,我们将总结高斯滤波的优点,并提出改进高斯滤波算法的建议。
最后,展望高斯滤波的未来发展,希望为读者提供一个全面了解高斯滤波的视角。
通过本文的阅读,读者将能够了解到高斯滤波的基本原理、应用领域以及它在图像处理中的参数设置及其影响。
希望本文能够对读者在实际应用中选择合适的滤波器大小提供一定的参考和指导。
1.2文章结构文章结构主要包括引言、正文和结论三个部分。
引言部分旨在简要介绍文章的研究背景和目的,为读者提供对文章后续内容的预期。
正文部分是文章的主体部分,详细介绍了高斯滤波的原理、应用和参数设置等内容。
结论部分对前文进行总结,总结高斯滤波的优点,并提出改进高斯滤波算法的建议,并展望高斯滤波的未来发展趋势。
为了让读者更好地理解文章的结构,以下是各部分的详细内容概述:1. 引言1.1 概述在引言的概述部分,可以简要介绍高斯滤波的概念和在图像处理中的重要性。
可以提及高斯滤波是一种常用的线性平滑滤波器,可用于去除图像中的噪声和平滑图像。
1.2 文章结构在引言的文章结构部分,将详细介绍文章的组织结构。
可以指出文章分为引言、正文和结论三个部分,并简要介绍各部分的内容概述。
各种滤波算法的比较数字滤波方法有很多种,每种方法有其不同的特点和使用范围。
从大的范围可分为3类。
1、克服大脉冲干扰的数字滤波法㈠.限幅滤波法㈡.中值滤波法2、抑制小幅度高频噪声的平均滤波法㈠.算数平均㈡.滑动平均㈢.加权滑动平均㈣一阶滞后滤波法3、复合滤波法在这我选用了常用的8种滤波方法予以介绍(一)克服大脉冲干扰的数字滤波法:克服由仪器外部环境偶然因素引起的突变性扰动或仪器内部不稳定引起误码等造成的尖脉冲干扰,是仪器数据处理的第一步。
通常采用简单的非线性滤波法。
1、限幅滤波法(又称程序判断滤波法)限幅滤波是通过程序判断被测信号的变化幅度,从而消除缓变信号中的尖脉冲干扰。
A、方法:根据经验判断,确定两次采样允许的最大偏差值(设为A)每次检测到新值时判断:如果本次值与上次值之差A,则本次值无效,放弃本次值,用上次值代替本次值B、优点:能有效克服因偶然因素引起的脉冲干扰C、缺点无法抑制那种周期性的干扰平滑度差D、适用范围: 变化比较缓慢的被测量值2、中位值滤波法中位值滤波是一种典型的非线性滤波器,它运算简单,在滤除脉冲噪声的同时可以很好地保护信号的细节信息。
A、方法:连续采样N次(N取奇数)把N次采样值按大小排列(多采用冒泡法)取中间值为本次有效值B、优点:能有效克服因偶然因素引起的波动(脉冲)干扰C、缺点:对流量、速度等快速变化的参数不宜D、适用范围:对温度、液位的变化缓慢的被测参数有良好的滤波效果(二)抑制小幅度高频噪声的平均滤波法小幅度高频电子噪声:电子器件热噪声、A/D量化噪声等。
通常采用具有低通特性的线性滤波器:算数平均滤波法、加权平均滤波法、滑动加权平均滤波法一阶滞后滤波法等。
1、算术平均滤波法算术平均滤波法是对N个连续采样值相加,然后取其算术平均值作为本次测量的滤波值。
A、方法:连续取N个采样值进行算术平均运算N值较大时:信号平滑度较高,但灵敏度较低N值较小时:信号平滑度较低,但灵敏度较高N值的选取:一般流量,N=12;压力:N=4B、优点:对滤除混杂在被测信号上的随机干扰信号非常有效。
10种AD采样的软件滤波方法及例程AD采样的软件滤波方法:1. 移动平均滤波(Moving Average Filtering):该方法通过计算一段时间内的采样数据的平均值来平滑信号。
例程如下:```pythondef moving_average_filter(data, window_size):filtered_data = []for i in range(len(data)):if i < window_size:filtered_data.append(sum(data[0:i+1])/(i+1))else:filtered_data.append(sum(data[i-window_size+1:i+1])/window_size)return filtered_data```2. 中值滤波(Median Filtering):该方法通过将采样数据排序,并选择中间值作为过滤后的数值来平滑信号。
例程如下:```pythonimport numpy as npdef median_filter(data, window_size):filtered_data = []for i in range(len(data)):if i < window_size:filtered_data.append(np.median(data[0:i+1]))else:filtered_data.append(np.median(data[i-window_size+1:i+1])) return filtered_data```3. 加权移动平均(Weighted Moving Average):该方法通过给予不同采样数据不同权重,计算加权平均值来平滑信号。
例程如下:```pythondef weighted_moving_average_filter(data, window_size, weights):filtered_data = []for i in range(len(data)):if i < window_size:weights_sum = sum(weights[0:i+1])filtered_data.append(sum([data[j]*weights[j] for j inrange(i+1)]) / weights_sum)else:weights_sum = sum(weights)filtered_data.append(sum([data[j]*weights[j] for j inrange(i-window_size+1, i+1)]) / weights_sum)return filtered_data```4. 指数加权平滑(Exponential Weighted Smoothing):该方法通过给予最近采样数据较大的权重,并通过滞后系数计算加权平均值来平滑信号。
哪个更好:SAR 还是Δ-Σ型ADC?
用于工业、仪器仪表和医疗设备中的高性能数据采集信号链要求具备高动态范围和精确的信号测量能力,同时还要应对苛刻的空间限制,以及散热和功耗等设计挑战。
获得较高动态范围的一种方法,是对转换器过采样,以便精确监控并测量来自传感器微弱和强烈的输入信号。
过采样是一种高性价比的过程,以大幅高于奈奎斯特频率的速率对输入信号进行采样,提升信噪比(SNR)和有效位数(ENOB)。
原则上讲,对ADC进行4倍过采样可额外提供1位分辨率,或增加6dB的动态范围(DR)。
由过采样而获得的DR改善为:
ΔDR=log2(OSR)×3dB
在很多情况下,过采样是集成数字滤波功能的Δ-Σ型ADC所固有的特性,其调制器时钟速率通常比信号带宽高32至256倍。
但要求在输入通道之间具有更高的开关速度时,便难以实现过采样。
SAR(逐次逼近型寄存器)ADC还常用于通道多路复用架构中——这些架构要求在接近满量程(最差情况)幅度时对步进输入作出快速响应,而不会产生任何建立时间方面的问题。
然而,这会极大提高驱动放大器的要求。
为了能在SAR输入端建立来自开关电容DAC阵列的反冲,放大器必须具备极为优秀的带宽、压摆率性能,以及良好的输出驱动能力。
若非如此,那么输出响应便会表现出非线性。
高吞吐速率的SARADC确实允许进行过采样。
这种情况下,低噪底(通过低RMS噪声和高吞吐速率组合实现)和高线性度尤为重要。
某些高性能SARADC提供更高的带宽、高精度和较短时间窗口内的离散采样能力,可用于快速控制和测量应用。
以较小的封装尺寸提供高吞吐速率以及低功耗有助于设。
小波变换中常见的滤波器类型与性能比较小波变换是一种用于信号分析和处理的强大工具。
在小波变换中,滤波器是至关重要的组成部分,它们决定了信号在不同频率上的分解和重构效果。
本文将介绍小波变换中常见的滤波器类型,并对它们的性能进行比较。
一、低通滤波器低通滤波器在小波变换中常用于信号的平滑处理。
它能够保留信号中的低频成分,而滤除高频成分。
常见的低通滤波器有Daubechies、Haar和Symlet等。
Daubechies滤波器是小波变换中最常用的滤波器之一。
它具有良好的频域局部化和时域紧致性,能够有效地捕捉信号中的细节信息。
然而,Daubechies滤波器的主要缺点是频率响应的过渡带宽较宽,可能导致信号在平滑过程中引入一些高频噪声。
Haar滤波器是最简单的小波变换滤波器之一。
它具有良好的时域紧致性,能够实现快速的计算。
然而,Haar滤波器的频域局部化能力较差,对信号的频率细节抓取能力有限。
Symlet滤波器是Daubechies滤波器的一种改进版本。
它在频域上具有更好的局部化能力,能够更准确地提取信号的细节信息。
然而,Symlet滤波器的时域紧致性相对较差,计算复杂度较高。
二、高通滤波器高通滤波器在小波变换中常用于信号的边缘检测和细节增强。
它能够保留信号中的高频成分,而滤除低频成分。
常见的高通滤波器有Reverse Daubechies、Reverse Haar和Reverse Symlet等。
Reverse Daubechies滤波器是Daubechies滤波器的一种改进版本。
它在频域上具有更好的高频响应特性,能够更准确地提取信号的边缘信息。
然而,Reverse Daubechies滤波器的时域紧致性相对较差,计算复杂度较高。
Reverse Haar滤波器是Haar滤波器的一种改进版本。
它在频域上具有更好的高频响应特性,能够更准确地提取信号的边缘信息。
然而,Reverse Haar滤波器的时域紧致性相对较差,计算复杂度较高。
delta-sigma型ADC的数字滤波器应用事项1、delta-sigma型ADCdelta-sigma型ADC以很低的采样分辨率(1位)和很高的采样速率将模拟信号数字化,通过使用过采样(Oversampling)技术,噪声整形和数字滤波技术增加有效分辨率,然后对滤波器输出进行采样抽取(Decimation)处理得到输出结果。
delta-sigma型ADC采用简单的模拟电路(仅一位量化器和一位数模转换器)和大量的数字信号处理电路,造价低廉却具有高可靠性,能在低频下获得极高的线性度和分辨率。
为了适应不同应用场合对响应时间,噪声滤波等性能的不同要求,delta-sigma型ADC通常允许用户对滤波器的结构和性能进行一定的编程组态。
2、数字滤波与模拟滤波与传统的模数转换器相比,delta-sigma型ADC具有独特的内置数字滤波器,分为FIR(有限冲击响应)和IIR (无限冲击响应)两种;FIR是非递归型,输出仅依赖于过去至当前的输入,IIR是递归型,输出是过去至当前的输入与输出值的函数。
数字滤波发生在模数转换后,它能消除模数转换过程中产生的噪声(特别是量化噪声);数字滤波比模拟滤波容易实现可编程性,依靠数字滤波器设计,用户可以编程转折频率和输出更新速率,对工频干扰(50Hz,60Hz)很容易取得90~100dB以上的抑制效果。
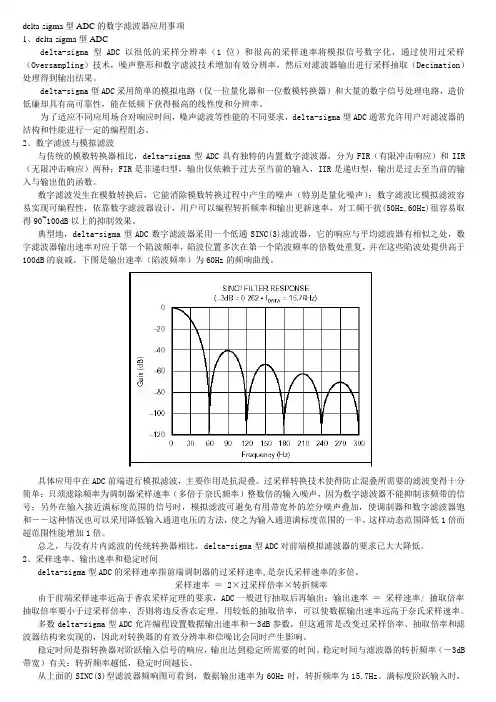
典型地,delta-sigma型ADC数字滤波器采用一个低通SINC(3)滤波器,它的响应与平均滤波器有相似之处,数字滤波器输出速率对应于第一个陷波频率,陷波位置多次在第一个陷波频率的倍数处重复,并在这些陷波处提供高于100dB的衰减。
下图是输出速率(陷波频率)为60Hz的频响曲线。
具体应用中在ADC前端进行模拟滤波,主要作用是抗混叠。
过采样转换技术使得防止混叠所需要的滤波变得十分简单:只须滤除频率为调制器采样速率(多倍于奈氏频率)整数倍的输入噪声,因为数字滤波器不能抑制该频带的信号;另外在输入接近满标度范围的信号时,模拟滤波可避免有用带宽外的差分噪声叠加,使调制器和数字滤波器饱和――这种情况也可以采用降低输入通道电压的方法,使之为输入通道满标度范围的一半,这样动态范围降低1倍而超范围性能增加1倍。
多种ADC的分析比较A/D转换技术现在的软件无线电、数字图像采集都需要有高速的A/D采样保证有效性和精度,一般的测控系统也希望在精度上有所突破,人类数字化的浪潮推动了A/D转换器不断变革,而A/D转换器是人类实现数字化的先锋。
逐次逼近型、积分型、压频变换型等,主要应用于中速或较低速、中等精度的数据采集和智能仪器中。
分级型和流水线型ADC 主要应用于高速情况下的瞬态信号处理、快速波形存储与记录、高速数据采集、视频信号量化及高速数字通讯技术等领域。
此外,采用脉动型和折叠型等结构的高速ADC,可应用于广播卫星中的基带解调等方面。
∑-Δ型ADC主应用于高精度数据采集特别是数字音响系统、多媒体、地震勘探仪器、声纳等电子测量领域。
下面对各种类型的ADC 作简要介绍。
1.逐次逼近型ADC逐次逼近型ADC应用非常广泛的模/数转换方法,它包括1个比较器、1个数模转换器、1个逐次逼近寄存器(SAR)和1个逻辑控制单元。
它是将采样输入信号与已知电压不断进行比较,1个时钟周期完成1位转换,N位转换需要N个时钟周期,转换完成,输出二进制数。
这一类型ADC的分辨率和采样速率是相互矛盾的,分辨率低时采样速率较高,要提高分辨率,采样速率就会受到限制。
优点:分辨率低于12位时,价格较低,采样速率可达1MSPS;与其它ADC相比,功耗相当低。
缺点:在高于14位分辨率情况下,价格较高;传感器产生的信号在进行模/数转换之前需要进行调理,包括增益级和滤波,这样会明显增加成本。
2.积分型ADC积分型ADC又称为双斜率或多斜率ADC,它的应用也比较广泛。
它由1个带有输入切换开关的模拟积分器、1个比较器和1个计数单元构成,通过两次积分将输入的模拟电压转换成与其平均值成正比的时间间隔。
与此同时,在此时间间隔内利用计数器对时钟脉冲进行计数,从而实现A/D转换。
积分型ADC两次积分的时间都是利用同一个时钟发生器和计数器来确定,因此所得到的D表达式与时钟频率无关,其转换精度只取决于参考电压VR。

电位器adc滤波处理电位器 ADC 滤波处理电位器 ADC 通常用于测量与电位器相连的电阻值。
然而,来自电位器的信号通常受到噪声和干扰的影响。
为了获得更准确的测量值,需要对信号进行滤波处理。
滤波技术有许多不同的滤波技术可用于此目的。
最常用的技术是:滑动平均滤波器:通过对一系列输入值求平均值来平滑信号。
指数加权移动平均滤波器:通过对新输入值赋予较高的权重,对旧输入值赋予较低的权重来平滑信号。
中值滤波器:通过对输入值进行排序并取中间值来平滑信号。
滤波器设计选择合适的滤波器取决于信号的特性和所需的精度。
以下因素需要考虑:截止频率:滤波器允许通过的最大频率。
滤波阶数:滤波器级数越多,滤波效果越好,但延迟也会更大。
滤波类型:低通滤波器允许低频信号通过,而高通滤波器允许高频信号通过。
实现滤波器可以用硬件或软件实现。
硬件滤波器通常使用模拟电路,而软件滤波器则使用数字算法。
软件滤波器的优势软件滤波器比硬件滤波器具有以下优势:灵活性:可以轻松调整滤波参数以适应不同的信号。
成本效益:可以与微控制器或 DSP 等现有处理设备一起使用。
低延迟:精心设计的软件滤波器可以比硬件滤波器具有更低的延迟。
代码示例以下是一个使用滑动平均滤波器的 C 代码示例:```c#include <stdlib.h>// 定义滑动平均滤波器的数据结构typedef struct {int window_size;int buffer;int sum;int index;} SlidingAverageFilter;// 初始化滑动平均滤波器SlidingAverageFilter init_sliding_average_filter(int window_size) {SlidingAverageFilter filter = (SlidingAverageFilter)malloc(sizeof(SlidingAverageFilter));filter->window_size = window_size;filter->buffer = (int)malloc(window_sizesizeof(int));filter->sum = 0;filter->index = 0;return filter;}// 更新滑动平均滤波器int update_sliding_average_filter(SlidingAverageFilter filter, int new_value) {// 将新值添加到缓冲区filter->buffer[filter->index] = new_value;// 更新和值filter->sum += new_value - filter->buffer[filter->index];// 更新索引filter->index = (filter->index + 1) % filter->window_size;// 返回滤波值return filter->sum / filter->window_size;}// 释放滑动平均滤波器voidrelease_sliding_average_filter(SlidingAverageFilter filter) {free(filter->buffer);free(filter);}```结论滤波信号对于从电位器 ADC 中获得准确的测量值至关重要。
一、图像噪声由于图像采集、处理、传输等过程不可避免的会受到噪声的污染,妨碍人们对图像理解及分析处理。
常见的图像噪声有高斯噪声、椒盐噪声等。
1、椒盐噪声2、高斯噪声高斯噪声是指噪声的密度服从高斯分布的一类噪声,由于高斯噪声在空间和频域中数学上的易处理性,这种噪声(也称为正态噪声)模型经常被用于实践中。
高斯噪声随机变量z的概率密度函数由下式给出:加入高斯噪声后的效果:二、图像平滑图像平滑从信号处理的角度看就是去除其中的高频信息,保留低频信息。
因此我们可以对图像实施低通滤波。
低通滤波可以去除图像中的噪声,对图像进行平滑。
根据滤波器的不同可以分为:均值滤波、高斯滤波、中值滤波、双边滤波我们认为高频信息就是噪声,低频信息就是有用的内容。
1、均值滤波(1)api介绍(2)实例分析import cv2 as cvimport numpy as npimport matplotlib.pyplot as pltfrom matplotlib import font_manager#字体设置my_font = font_manager.fontproperties(fname="c:/windows/fonts/sthupo.ttf")#1、读取图像img = cv.imread("./images/girl.jpg")#2、均值滤波blur = cv.blur(img, (5,5))#3、图像显示plt.figure(figsize=(10,8), dpi=100)# subplot中的121代表[1,2,1],表示在本区域里显示1行2列个图像,最后的1表示本图像显示在第一个位置。
plt.subplot(121)plt.imshow(img[:,:,::-1])plt.title("原图", fontproperties=my_font)plt.xticks([]), plt.yticks([])plt.subplot(122)plt.imshow(blur[:,:,::-1])plt.title("均值滤波后的结果", fontproperties=my_font)plt.xticks([]), plt.yticks([])plt.show()2、高斯滤波图像是二维的,所以使用二维高斯分布。
三种线性滤波器比较椒盐噪声椒盐噪声也称为脉冲噪声,是图像中经常见到的一种噪声,它是一种随机出现的白点或者黑点,可能是亮的区域有黑色像素或是在暗的区域有白色像素(或是两者皆有)。
椒盐噪声的成因可能是影像讯号受到突如其来的强烈干扰而产生、类比数位转换器或位元传输错误等。
例如失效的感应器导致像素值为最小值,饱和的感应器导致像素值为最大值。
脉冲噪声脉冲噪声(pulse noise)在通信中出现的离散型噪声的统称。
它由时间上无规则出现的突发性干扰组成。
脉冲噪声(impulsive noise)是非连续的,由持续时间短和幅度大的不规则脉冲或噪声尖峰组成。
产生脉冲噪声的原因多种多样,其中包括电磁干扰以及通信系统的故障和缺陷,也可能在通信系统的电气开关和继电器改变状态时产生。
脉冲噪声对模拟数据一般仅是小麻烦。
但在数字式数据通信中,脉冲噪声是出错的主要原因。
脉冲噪声,它的持续时间小于1秒、噪声强度峰值比其均方根值大于10dB,而重复频率又小于10Hz的间断性噪声。
脉冲噪声:突然爆发又很快消失,举个例子:持续时间≤0.5s,间隔时间>1s,声压有效值变化≥40dB(A)的噪声。
Demo源码void OpenCVManager::testBoxAndBlurAndGaussianBlurFilter(){QString fileName1 ="E:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/1.jpg";cv::Mat srcMat = cv::imread(fileName1.toStdString());cv::String windowName = _windowTitle.toStdString();cvui::init(windowName);cv::resize(srcMat, srcMat, cv::Size(400, 300));qDebug() << __FILE__ <<__LINE__ << srcMat.rows << srcMat.cols;if(!srcMat.data){qDebug() << __FILE__ << __LINE__<< "Failed to load image:" << fileName1;return;}cv::Mat dstMat;dstMat = cv::Mat::zeros(srcMat.size(), srcMat.type());cv::Mat windowMat = cv::Mat(cv::Size(srcMat.cols * 3, srcMat.rows * 3),srcMat.type());bool isBoxFilter = true;int ksize = 3; // 核心大小int anchor = -1; // 锚点, 正数的时候必须小于核心大小,即:-1 <= anchor < ksizeint ksize2 = 3; // 核心大小int anchor2 = -1; // 锚点, 正数的时候必须小于核心大小,即:-1 <= anchor < ksizeint ksize3 = 3; // 核心大小int sigmaX = 0; // x方向的标准偏差int sigmaY = 0; // y方向的标准偏差while(true){windowMat = cv::Scalar(0, 0, 0);cvui::window(windowMat, dstMat.cols, dstMat.rows * 0, dstMat.cols, dstMat.rows, "boxFilter settings");cvui::window(windowMat, dstMat.cols, dstMat.rows * 1, dstMat.cols, dstMat.rows, "blurFilter settings");cvui::window(windowMat, dstMat.cols, dstMat.rows * 2, dstMat.cols, dstMat.rows, "gaussianBlurFilter settings");{// 原图先copy到左边cv::Mat leftMat = windowMat(cv::Range(0, srcMat.rows),cv::Range(0, srcMat.cols));cv::addWeighted(leftMat, 0.0f, srcMat, 1.0f, 0.0f, leftMat);// 中间为调整方框滤波参数的相关设置// 是否方框滤波cvui::checkbox(windowMat, 500, 60, "boxFilter", &isBoxFilter);cvui::printf(windowMat, 500, 120, "ksize");cvui::trackbar(windowMat, 500, 130, 200, &ksize, 1, 10);if(anchor >= ksize){anchor = ksize - 1;}cvui::printf(windowMat, 500, 180, "anchor");cvui::trackbar(windowMat, 500, 190, 200, &anchor, -1, ksize-1);// 方框滤波cv::boxFilter(srcMat,dstMat,-1,cv::Size(ksize, ksize),cv::Point(anchor, anchor),isBoxFilter);// 效果图copy到右边// 注意:rang从位置1到位置2,不是位置1+宽度cv::Mat rightMat = windowMat(cv::Range(0, srcMat.rows),cv::Range(srcMat.cols * 2, srcMat.cols * 3));cv::addWeighted(rightMat, 0.0f, dstMat, 1.0f, 0.0f, rightMat);}{// 原图先copy到左边cv::Mat leftMat = windowMat(cv::Range(srcMat.rows * 1, srcMat.rows * 2), cv::Range(0, srcMat.cols));cv::addWeighted(leftMat, 0.0f, srcMat, 1.0f, 0.0f, leftMat);// 中间为调整滤波参数的相关设置cvui::printf(windowMat, 500, 100 + 300, "ksize");cvui::trackbar(windowMat, 500, 110 + 300, 200, &ksize2, 1, 10);if(anchor2 >= ksize2){anchor2 = ksize2 - 1;}cvui::printf(windowMat, 500, 160 + 300, "anchor");cvui::trackbar(windowMat, 500, 170 + 300, 200, &anchor2, -1, ksize2-1);// 均值滤波:方框滤波比均值滤波多了颜色深度的参数cv::blur(srcMat,dstMat,cv::Size(ksize2, ksize2),cv::Point(anchor2, anchor2));// 效果图copy到右边// 注意:rang从位置1到位置2,不是位置1+宽度cv::Mat rightMat = windowMat(cv::Range(srcMat.rows * 1, srcMat.rows * 2), cv::Range(srcMat.cols * 2, srcMat.cols * 3));cv::addWeighted(rightMat, 0.0f, dstMat, 1.0f, 0.0f, rightMat);}{// 原图先copy到左边cv::Mat leftMat = windowMat(cv::Range(srcMat.rows * 2, srcMat.rows * 3), cv::Range(0, srcMat.cols));cv::addWeighted(leftMat, 0.0f, srcMat, 1.0f, 0.0f, leftMat);// 中间为调整滤波参数的相关设置cvui::printf(windowMat, 500, 60 + 600, "ksize = size * 2 + 1");cvui::trackbar(windowMat, 500, 70 + 600, 200, &ksize3, 0, 10);cvui::printf(windowMat, 500, 120 + 600, "sigmaX");cvui::trackbar(windowMat, 500, 130 + 600, 200, &sigmaX, 0, 100);cvui::printf(windowMat, 500, 180 + 600, "sigmaY");cvui::trackbar(windowMat, 500, 190 + 600, 200, &sigmaY, 0, 100);// 高斯滤波cv::GaussianBlur(srcMat, dstMat, cv::Size(ksize * 2 + 1, ksize * 2 + 1), sigmaX / 10.f, sigmaY / 10.f);// 效果图copy到右边// 注意:rang从位置1到位置2,不是位置1+宽度cv::Mat rightMat = windowMat(cv::Range(srcMat.rows * 2, srcMat.rows * 3), cv::Range(srcMat.cols * 2, srcMat.cols * 3));cv::addWeighted(rightMat, 0.0f, dstMat, 1.0f, 0.0f, rightMat);}// 更新cvui::update();// 显示cv::imshow(windowName, windowMat);// esc键退出if(cv::waitKey(25) == 27){break;}}}。
高斯滤波和均值滤波
高斯滤波是一种平滑图像的方法,可以去除噪声和细节,使图像更加清晰。
它是用一个高斯函数来对每个像素周围的像素做加权平均,权重随着距离增大而减小。
这种方法的优点是可以保留边缘信息,因为权重对边缘附近的像素更高。
均值滤波则是对每个像素周围的像素做简单的平均,去除图像中的噪声和细节。
它的优点是计算简单,但缺点是会模糊图像,不如高斯滤波保留边缘信息。
在实际应用中,根据需要选择适当的滤波方法,可以使用高斯滤波去除图像中的高频噪声,使用均值滤波去除低频噪声。
也可以结合使用多种滤波方法,达到更好的效果。
- 1 -。
燕山大学课程设计说明书题目:几种平滑滤波器的作用与比照试验设计学院〔系〕:电气工程学院年级专业:学号:学生:指导教师:教师职称:目录第一章平滑滤波器1第二章处理程序和处理结果3 第三章比拟差异8第四章总结10参考文献11第一章平滑滤波器滤波的本义是指信号有各种频率的成分,滤掉不想要的成分,即为滤掉常说的噪声,留下想要的成分,这即是滤波的过程。
所谓目的:一是抽出对象的特征作为图像识别的特征模式;另一个是为适应图像处理的要求,消除图像数字化时所混入的噪声。
各类图像处理系统在图像的采集、获取、传送和转换(如成像、复制扫描、传输以及显示等)过程中,均处在复杂的环境中,光照、电磁多变,所有的图像均不同程度地被可见或不可见的噪声干扰。
噪声源包括电子噪声、光子噪声、斑点噪声和量化噪声。
如果信噪比低于一定的水平,噪声逐渐变成可见的颗粒形状,导致图像质量的下降。
除了视觉上质量下降,噪声同样可能掩盖重要的图像细节,在对采集到的原始图像做进一步的分割处理时,我们发现有一些分布不规律的椒盐噪声,为此采取相应的对策就是对图像进展必要的滤波降噪处理。
图像的噪声滤波器有很多种,常用的有线性滤波器,非线性滤波器。
采用线性滤波如邻域平滑滤波,对受到噪声污染而退化的图像复原,在很多情况下是有效的。
但大多数线性滤波器具有低通特性,去除噪声的同时也使图像的边缘变模糊了。
而另一种非线性滤波器如中值滤波,在一定程度上可以克制线性滤波器所带来的图像模糊问题,在滤除噪声的同时,较好地保存了图像的边缘信息。
这些滤波都是通过平滑滤波器来实现的。
平滑滤波是低频增强的空间域滤波技术。
它的目的有两类:一类是模糊;另一类是消除噪音。
所谓平滑滤波是指对一些不平滑的信号做处理,使它变平滑。
那什么是不平滑呢,就是在示波器上看起伏不平的信号,最典型的就是交流整流后的脉动信号。
这些随时间起伏不平变化的信号成分在频率上代表一些高频率的成分,上升下降越快,那么表示频率越高。
思考题1.中值滤波对去除脉冲性质的干扰比较有效,而算术平均滤波对滤除随机干扰非常有效。
2.DAC1208与16位微处理器一起使用时,12位数据线可以直接与微处理器的数据总线接口,而与8位微处理器一起使用时,则需分步传输。
3.移动平均滤波的算法是:先在RAM中建立一个数据缓冲区,依顺序存放N次采样数据,然后每采进一个新数据,就将最早采集的数据去掉,最后再求出当前RAM缓冲区中的N 个数据的算术平均值或加权平均值。
4.基准电压Vr 的精度和稳定性影响零位误差、增益误差的校正效果。
5.测量获得一组离散数据建立近似校正模型,非线性校正精度与离散数据精度无关,仅与建模方法有关。
6.GP-IB系统中的计算机一般同时兼有讲者、听者和控者的功能,系统中有几台计算机就有几个控者,他们同时起作用,这样可以增强系统的控制能力。
7.实际A/D转换器转换精度所对应的误差指标包括量化误差在内。
8.RS232 通信采用的是TTL电平,因此它的传输距离比485 短。
B协议为设备定义了2种供电模式:自供电和总线供电。
在自供电模式下,USB设备不需要任何外接电源设备。
10.双口RAM具有两套完全独立的数据线、地址线、读写控制线和存储器阵列,允许两个独立的系统或模块同时对双口RAM进行读/写操作。
11.在异步通讯中,只要求发送和接收两端的时钟频率在短期内保持同步。
12.LCD显示器有静态驱动和叠加驱动两种驱动方式,这两种驱动方式可在使用时随时改变。
13.智能仪器中的噪声与干扰是因果关系,噪声是干扰之因,干扰是噪声之果。
14.仪器消息通过接口功能进行传递,因而会改变接口功能的状态。
15.智能DVM的基本测量水平主要有微处理器性能来决定。
16.软件开发过程的三个典型阶段是定义、开发和测试。
17.RAM 测试方法中,谷值检测法无法检测“ 粘连” 及“ 连桥” 故障。
18.并行比较式A/D转换器是现行电子式A/D转换器中转换速度最快的一种。