在汽车参数化中ESP系统的发展
- 格式:doc
- 大小:269.37 KB
- 文档页数:9
42科技资讯 SC I EN C E & TE C HN O LO G Y I NF O R MA T IO N信 息 技 术汽车底盘控制通常是指通过控制汽车的侧向运动、垂向运动和纵向运动来提高汽车的操纵性、乘坐舒适性和牵引/制动性能,对这些运动的控制可以分别通过转向盘、油门、制动踏板来实现,相应的执行量是前轮的转向角及车轮上的驱动力矩或制动力矩,真正起作用的是轮胎的纵向力和侧向力。
本文通过总结汽车底盘控制的的研究成果,分析今后底盘控制技术的发展趋势。
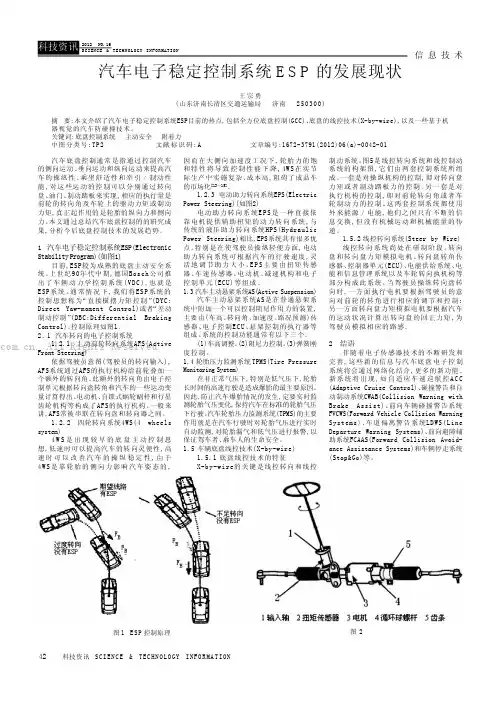
1 汽车电子稳定控制系统ESP(Electronic Stability Program)(如图1)目前,ESP较为成熟的底盘主动安全系统。
上世纪90年代中期,德国Bosch公司推出了车辆动力学控制系统(V DC ),也就是ESP系统。
通常情况下,我们将ES P系统的控制思想称为“直接横摆力矩控制”(DYC:Direct Yaw-moment Control)或者“差动制动控制”(DBC:Differential Braking Control)。
控制原理如图1。
2.1汽车转向的电子控制系统1.2.1 主动前轮转向系统AFS(Active Front Steering)依据驾驶员意图(驾驶员的转向输入),AFS系统通过AFS的执行机构给前轮叠加一个额外的转向角。
此额外的转向角由电子控制单元根据转向盘转角和汽车的一些运动变量计算得出。
电动机、自锁式蜗轮蜗杆和行星齿轮机构等构成了AFS的执行机构。
一般来讲,AFS常被串联在转向盘和转向器之间。
1.2.2 四轮转向系统4WS(4 wheels system)4W S 是出现较早的底盘主动控制思想,低速时可以提高汽车的转向灵便性,高速时可以改善汽车的操纵稳定性,由于4W S 是靠轮胎的侧向力影响汽车姿态的,因而在大侧向加速度工况下,轮胎力的饱和特性将导致控制性能下降,4W S在实节际生产中实施复杂、成本高,阻碍了成品车的市场化[13~15]。
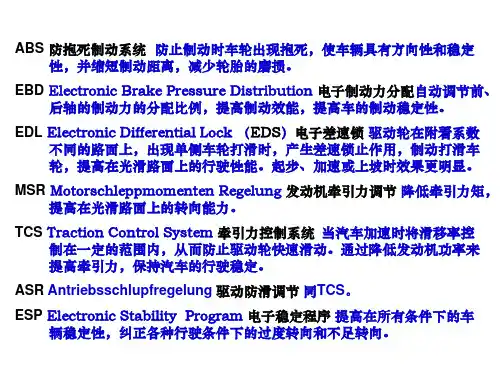
浅谈汽车电子稳定程序系统(ESP)(图)随着现代汽车技术的发展,车辆的主动安全性大大提高。
为了防止车轮抱死,避免车辆在紧急制动时因车轮抱死而失控,1978年博世公司开发了世界首套ABS,并在1985年投产。
据统计在2004年欧洲生产的新车ABS,装备率已达到85%,而欧洲生产协会更保证对2004年7月起生产的新车100%装备ABS系统。
在我国生产的新车中装备ABS系统也达到66%。
由于ABS不能解决车辆在湿滑路面上起步或加速出现的车轮打滑问题,更不能避免车辆发生侧滑。
因此,在ABS的基础上,进一步发展出了牵引力控制系统(TCS)。
在车辆起步或加速时,如果某个车轮出现了打滑现象(车轮速度传感器不断监视着每一个车轮),TCS会迅速干预制动系统和发动机工作,使车辆能够安全地起步或加速(防止车轮打滑,保证车辆具有良好的牵引性能,同时照顾其稳定性和操纵性)。
1995年博世公司又推出了电子稳定程序(Electronic Stability Program,简称ESP 系统)。
实际上ESP系统也是一种牵引力控制系统,但是与其它牵引力控制系统比较,ESP 不但控制驱动轮,而且可控制从动轮。
如后轮驱动汽车出现转向过度时,ESP便会慢刹外侧的前轮来稳定车子,防止后轮失控而发生甩尾现象;在转向过小时,为了校正行驶循迹方向,ESP则会慢刹内侧后轮,从而校正行驶方向。
ESP是一个主动安全系统,通过有选择性的分缸制动及发动机管理系统干预,防止车辆滑移。
ESP判定为出现转向不足将制动内侧后轮,从而稳定车辆。
当ESP判定为出现转向过度,ESP将制动外侧前轮,防止出现甩尾,并减弱过度转向趋势,从而稳定车辆。
如果单独制动某个车轮不足以稳定车辆,ESP将通过降低发动机扭矩输出的方式来制动其它车轮来满足需求。
有ESP系统的与只有ABS的汽车相比,它们之间的差别在于ABS只能被动地做出反应,而ESP则能够控测和分析车况,并纠正驾驶错误,预患于未然。

车辆ESP系统的发展及稳定性研究作者:唐新胜来源:《科学与财富》2014年第03期摘要:ESP是“Electronic Stability Program”的缩写形式,是电子稳定程序,即车辆稳定性控制系统。
是提高汽车安全性的重要系统。
近年来,汽车行驶速度不断加快,道路的行车密度不断增大,因此,车辆的稳定性越来越得到人们的重视,许多交通事故的发生,都是因为车辆稳定性差的原因。
ESP系统就是解决这一问题的重要措施。
它可以大大降低交通事故并提高道路安全。
它整合了防抱死制动系统和牵引力控制系统,能够有效防止汽车在转向时滑移、不稳定的现象,有效提高汽车的安全性。
关键词:ESP系统发展稳定性ESP系统综合了ABS(防抱死制动系统)、ASR(加速防滑控制系统)和BAS(制动辅助系统)三个系统[1]。
这个系统能够通过合理分配轮胎力,通过汽车动力学行为使汽车最大限度的按照驾驶员的意愿行驶,也可以通过调节发动机来控制汽车,使汽车能达到司机的操作意图,能在驾驶过程中,保持车辆的稳定。
ESP系统现在在国外已经批量生产,但在国内仍然处于研究之中。
因此,许多国产车上还没有装备这个系统。
一、ESP系统的发展ESP最早使用是在1987年在奔驰和宝马的汽车上安装了牵引力控制系统,这种控制系统可以针对不同的车施加不同的制动力和牵引力来保持车辆稳定,最初设计并不是为了辅助转向,90年代时,牵引力控制系统的叫TCL,最初是三菱装备了防滑系统[2],在这之后,系统又不断更新,和现在的ESP大致一样了,它的设计目的是帮助司机在弯道时,车辆能够按照预定路线行驶,车载电脑可以获取车辆运行各部的参数,使电子牵引力控制系统起作用。
表一几种汽车在没有ESP和有ESP的情况下的最大速度表二能够安装ESP的部分汽车品牌和不能安装的部分汽车品牌二、ESP系统的组成ESP系统由电子控制单元(ECU)、轮速传感器、横向或纵向角速度传感器、方向盘转角传感器,横摆角速度传感器和液压系统构成。

ESP工作原理和工作过程ESP是一种车辆动态稳定系统,全称为Electronic Stability Program,它通过传感器监测车辆的运动状态,对车辆进行自动干预,帮助驾驶员保持车辆的稳定性,提高驾驶安全性。
本文将探讨ESP的工作原理和工作过程。
工作原理ESP系统的主要工作原理基于车辆动力学和控制理论。
通过车辆上安装的传感器(如转向传感器、车速传感器、侧倾传感器等),ESP系统能够实时监测车辆的各种参数,如车速、加速度、侧倾角等。
同时,ESP系统还监测驾驶员的方向盘操作,通过这些数据,系统可以判断车辆的运动状态。
当ESP系统检测到车辆出现潜在的失控情况时(如车辆打滑、侧滑等),系统会通过制动系统或调整车辆动力来进行干预,帮助车辆回复稳定状态。
具体干预方式包括有针对性地制动某个车轮、调整发动机输出功率等操作,以恢复车辆的稳定性。
工作过程ESP系统的工作过程可以简单地分为以下几个步骤:1.传感器监测:ESP系统不断地通过各种传感器监测车辆状态,包括车速、车轮转速、侧倾角等参数。
2.数据处理与分析:ESP系统对传感器获取的数据进行处理和分析,判断车辆是否出现失控情况。
3.干预决策:当系统确定车辆存在失控风险时,ESP系统会根据预设的算法和逻辑,制定相应的干预措施。
4.实施干预:系统会通过制动系统或调整车辆动力等方式,对车辆进行干预,恢复稳定状态。
5.监测反馈:ESP系统持续监测车辆状态,确保车辆恢复稳定后,逐渐减少干预措施,让驾驶员重新掌控车辆。
在车辆行驶过程中,ESP系统不断重复以上过程,保障车辆在各种路况下保持稳定性,确保驾驶安全。
结语ESP作为一种重要的车辆安全系统,通过其精确的传感器监测和高效的干预机制,为驾驶员提供了额外的安全保障。
了解ESP的工作原理和工作过程不仅可以帮助驾驶者更好地理解车辆的运动控制,还有助于提高行车安全意识,降低交通事故发生概率。
希望本文能够带给您更多有关ESP系统的了解和认识。
汽车电子稳定程序(ESP)的原理与调节随着汽车工业的不断发展,汽车电子系统也得到了迅猛的发展。
汽车电子稳定程序(ESP)作为一种先进的汽车安全控制系统,被广泛应用于现代汽车中。
本文将介绍ESP的工作原理以及调节方法。
一、ESP的原理ESP系统采用了多个传感器,如陀螺仪、方向盘传感器、车速传感器等,以监控车辆行驶状态和驾驶员的操作。
当系统探测到车辆出现可能导致失控的情况时,ESP系统会通过电子控制单元(ECU)对刹车系统进行控制,有效减少车辆的滑动、侧滑和悬挂摇摆等情况。
ESP系统主要基于两个核心原理:车辆动力学和刹车力矩分配。
1. 车辆动力学原理车辆动力学原理是ESP系统最基本的原理之一。
该原理通过传感器监测车辆的侧偏角、滚转角等参数,以实时掌握车辆的状态。
当车辆发生侧滑或滚动时,ESP系统通过控制刹车来实现对车辆的稳定控制。
2. 刹车力矩分配原理ESP系统利用车辆动力学原理,通过刹车力矩的分配来实现对车辆的稳定。
基于传感器的反馈信息,ESP系统可以感知到每个车轮的速度差异,并根据差异大小和方向,通过调节每个车轮的刹车力矩来消除车辆的侧滑和滑动。
二、ESP的调节方法ESP系统的调节对于确保系统的准确性和性能至关重要。
通过合理的调节,ESP系统能够更好地适应各种路况和驾驶风格。
以下是ESP 系统的常见调节方法:1. 系统灵敏度调节系统灵敏度调节是根据驾驶员的需求来调整ESP系统的响应速度和干预水平。
一般来说,ESP系统的响应速度越快,干预水平越高,车辆的安全性就越高。
但是,过于敏感的系统可能会导致过多的干预,影响驾驶员的操控感受。
因此,根据不同的驾驶环境和驾驶风格,可以调整ESP系统的灵敏度,以平衡安全性和驾驶的舒适性。
2. 刹车力矩分配调节通过调节刹车力矩分配,可以实现对车辆侧滑和滑动的控制。
根据车辆的情况和驾驶者的需求,ESP系统可以主动调整每个车轮的刹车力矩,以保持车辆的稳定性。
一般来说,当车辆发生侧滑或失控时,ESP系统会增加受控轮的刹车力矩,减少侧滑或滑动的发生。
汽车ESP控制系统工作原理及发展姓名:xxx 学号:xxx(北京理工大学机械与车辆学院车辆工程,北京 100081)摘要:汽车电子稳定程序控制系统是一种新型主动安全性控制系统,是继汽车防抱死制动系统和牵引力控制系统发展起来的。
该系统基于汽车翻转角速度、横向线加速度和偏转力矩等的测量值,不但能够纠正诸如翻转或者打滑等各种汽车不稳定行驶状态,而且能够显著提高汽车线内行驶的稳定性,缩短在弯道或湿滑路面上紧急制动时的制动距离,防止出现危险状况,从而更有效、更显著地提高汽车的操纵稳定性和行驶安全性。
本文介绍汽车电子稳定系统的工作原理、组成部件及其功能以及其发展。
1.ESP的发展及其现状随着电子技术的发展,利用控制技术提高汽车的行使安全性一直是汽车领域的研究热点。
早在1936 年德国博世(Bosch)公司就第一个获得了用电磁式车轮轮速传感器获取车轮的ABS 专利。
直到上世纪60 年代末和70 年代初,美国三大汽车公司才分别推出了装有ABS 的高级轿车,但由于受当时技术条件的限制,ABS采用了模拟计算机与真空作用的压力调节器,在控制精度和可靠性上出现了很多问题,美国汽车制造厂家不得不在70 年代终止了ABS 轿车的生产。
随着数字计算机和调节器的发展,ABS 的性能和抗干扰能力不断增强,ABS 在欧洲又重新兴起。
在上世纪80 年代中后期和90 年代,ABS 在世界范围内得到了广泛地推广和应用,成为在汽车上应用最成功的电子控制产品之一,大大改善了汽车在制动时的稳定性。
在90 年代中期以后,主要汽车生产厂家生产的轿车几乎全部配备ABS,使得ABS 成为了现代汽车的标准装备。
汽车驱动防滑控制系统(ASR)是伴随着ABS 产品化发展起来的,实质上它是ABS 基本思想在驱动领域的发展和推广。
ASR 的专利在70 年代开始出现。
但直到1985 年才有瑞典VOLVO 汽车公司把这项技术转化为产品,开发了一种称为ETC 的电子牵引力控制系统并安装在V olvo760 Turbo 汽车上,该系统仅通过调节燃油供给量调节发动机的输出力矩来控制驱动轮滑转,但未采用对制动系统的控制。
2024年车身稳定控制系统(ESC)市场前景分析引言随着汽车行业的发展,车辆安全性能变得越来越重要。
车身稳定控制系统(Electronic Stability Control,简称ESC)作为一项关键的安全技术,具有在紧急情况下保持车辆稳定的功能。
本文将对车身稳定控制系统的市场前景进行分析。
市场概述车身稳定控制系统是一种利用电子技术来监测和控制车辆行驶稳定性的系统。
它通过传感器实时感知车辆的动态状态,当发现车辆出现失控迹象时,自动调整发动机输出和车轮刹车力度,以保持车辆的稳定性。
目前,ESC系统已成为许多汽车制造商在车辆中必备的安全设备之一。
市场驱动因素1. 政府法规许多国家和地区的政府已经推出了强制性的车辆安全法规,要求所有新车都必须配备车身稳定控制系统。
这些法规的实施促使了ESC系统的快速普及和市场需求的增加。
2. 消费者需求消费者对行驶安全的关注度不断提高,他们更倾向于购买配备安全技术的汽车。
车身稳定控制系统的出现提供了更高的行驶安全保障,满足了消费者对安全性能的需求。
3. 汽车制造商的竞争随着各大汽车制造商对车身稳定控制系统的推广和应用,市场上的竞争也日益激烈。
为了保持竞争力,制造商在新车型中普遍加入了ESC系统,这进一步推动了市场的发展。
市场前景1. 市场规模根据市场研究机构的数据显示,全球车身稳定控制系统市场规模正在迅速增长。
预计到2025年,ESC市场的价值将超过xxx亿美元。
2. 市场分布目前,ESC系统已经在发达国家的车辆中广泛应用,如美国、欧洲等地。
然而,在发展中国家和新兴市场中,ESC系统的应用仍然较为有限。
随着这些国家和地区的经济发展和消费者安全意识的提高,ESC市场的潜力将进一步释放。
3. 市场竞争目前,全球车身稳定控制系统市场存在着一些主要的参与者,如博世、ZF等。
这些公司不断提升自身的技术水平和产品性能,以满足市场需求并保持竞争优势。
此外,新兴科技公司也开始涉足ESC市场,进一步加剧了市场的竞争。
汽车电子稳定系统ESP随着现代汽车技术的不断发展,越来越多的汽车电子系统被引入到汽车生产中。
其中,ESP系统是一种普遍采用的汽车电子系统,它的宗旨就是提高汽车的驾驶稳定性,从而提升驾驶的安全性。
本文将介绍汽车电子稳定系统ESP的工作原理,其作用和优越性。
一、ESP系统的工作原理ESP系统是基于车辆动态平衡和物理学定律建立的,其核心技术是借助车辆传感器来检测车辆状态的变化,如车速、转向角度、横向加速度和车辆倾斜角度等,并将这些数据汇总到中央计算机中进行计算和分析,如果计算结果表明汽车发生了横向偏差或失控的情况,计算机会向相应的驱动系统、制动系统和转向系统发送信息,实时调整汽车的转向、制动和动力输出,以保持车辆稳定性。
二、ESP系统的作用1.提高行驶稳定性:ESP系统可以检测车辆动态平衡,减少横向偏差和车身倾斜,从而防止车辆失控、侧翻和行驶偏离等情况的发生,确保行驶的平稳和安全。
2.提高车辆的抓地力:ESP系统可以通过调整轮胎的摩擦力,增强车辆的牵引力和抓地力,同时有效减少轮胎的磨损和燃油消耗。
3.增加驾驶便利性:ESP系统可以针对不同路况和环境自动调整制动系统、转向系统和动力输出,使驾驶人员更加容易掌握车辆,并可以减少驾驶员的驾驶疲劳程度。
4.提高安全性:ESP系统是一种安全驾驶的重要保障,它可以提升车辆的行驶稳定性、抓地力和灵活性,降低行车事故的风险。
三、ESP系统的优越性1.智能化:ESP系统采用先进的计算机技术和车辆传感器技术,实现车辆状态的实时检测和数据分析,并根据计算结果自动调整车辆的制动、转向和动力输出。
2.适用性广:ESP系统可以适用于多种车型和不同驾驶环境,无论是城市道路还是乡村小路,都可以有效提升车辆的稳定性和安全性。
3.效果显著:ESP系统具有比传统的车辆转向控制和制动系统更加精准和迅速的反应时间,能够更好地控制车辆的横向运动,从而极大地提高了行车的安全性和可靠性。
4.可维护性强:因为ESP系统不涉及到机械的运作部件,所以其可靠性和维护难度相对较小,相比之下,ESP系统的维护成本也要低得多。
收稿日期:2018-01-09基金项目:北京农业职业学院院级技术研发项目(XY⁃YF⁃14⁃39)作者简介:陆静兵(1980 ),男,工学硕士,副教授,主要从事汽车动力学与控制研究㊂E⁃mail:xiaoluchinaren@sina com㊂DOI:10 19466/j cnki 1674-1986 2018 05 022我国汽车电子稳定控制系统(ESP)发展现状浅析陆静兵(北京农业职业学院,北京102208)摘要:汽车电子稳定控制系统(ESP)是汽车主动安全的重要组成部分㊂对比国内外机动车安全运行相关法规㊁ESP发展现状,分析造成我国ESP装车率低的原因,并提出解决方法㊂关键词:汽车;电子稳定控制系统;发展现状中图分类号:U46㊀文献标志码:A㊀文章编号:1674-1986(2018)05-081-02AnalysisofDevelopmentStatusofElectronicStabilityProgram(ESP)inChinaLUJingbing(BeijingVocationalCollegeofAgriculture,Beijing102208,China)Abstract:ESP(ElectronicStabilityProgram)isanimportantpartoftheactivesafetyofvehicles.Comparingwiththecurrentlawsandregulationsonthesafeoperationofmotorvehiclesathomeandabroad,thecurrentsituationofthedevelopmentofESPwasanalyzed.ThereasonsthatcausedthelowinstallationrateofESPwereanalyzedandthesolutionswereproposed.Keywords:Automobile;Electronicstabilityprogram;Developmentstatus0㊀引言随着我国智能汽车的快速发展,紧握方向盘的双手将被渐渐解放,而与此相关的核心技术依旧紧握于他国之手㊂如何打破国外 技术垄断 是我国汽车产业发展不可回避的一个问题㊂以汽车电子稳定控制系统(ElectronicStabilityProgram,ESP)为例,汽车ESP系统在欧洲各国业已普及,而国内安装率仍相对较低㊂通过对国内外汽车ESP系统的法规应用要求㊁技术发展状况的分析比较,试图寻找破解我国汽车产业自主创新所面临的核心技术缺失难题的钥匙㊂1㊀国外ESP技术已基本普及1 1㊀ESP的组成及功用汽车ESP系统是在防抱死控制系统(ABS)的基础上开发出的底盘制动技术,主要由控制单元㊁转向传感器㊁轮速传感器㊁侧滑传感器㊁横向加速度传感器等组成㊂ESP实现车辆自动安全控制,能有效地改善汽车在制动㊁驱动和转向等动态工况下的行驶稳定性和安全性㊂通常人们说的ESP其实是博世公司的注册商标,准确书写应为ESP®㊂在相关法规中,将电子稳定控制系统称为车身稳定控制系统ESC(ElectronicStabilityControl),所以从学术角度来讲,广义上的电子稳定控制系统称为ESC才严谨㊂基于德国博世公司最早将电子稳定控制系统称为ESP㊁人们普遍的称呼习惯,文中亦将电子稳定控制系统称为ESP㊂美国高速公路安全管理局的研究表明:将ESP作为标准配置能降低34%的轿车单车事故㊁71%的轿车翻车事故㊁59%的SUV单车事故;如果标配ESP系统,在美国每年超过1万个生命能够得以拯救,25万起人员伤害能够得以避免[1]㊂此外,北美高速公路保险协会的研究也表明,安装ESP能有效降低43%致命的交通事故㊂1 2㊀多数国家强制要求汽车安装ESP全球生产汽车电子稳定控制系统的厂家有很多,前六大制造商分别是:德国博世㊁美国天合㊁德国大陆特维斯㊁日本电装㊁日本爱信㊁美国德尔福㊂同时,不同的汽车生产厂商会采用不同电子稳定控制系统厂家的解决方案,并与自己开发的车型相匹配,从而不同汽车厂商对电子稳定控制系统也有不同的叫法㊂主要有:德尔福和天合生产的系统都被命名为ESC,丰田公司称呼为VSC,宝马称为DSC,保时捷称为PSM,通用公司称为StabiliTrak,福特公司称为ADVANceTrac®,丰田皇冠和雷克萨斯称为VDIM㊂目前,多数欧美国家都强制要求汽车安装ESP等电子稳定控制系统㊂美国在2007年颁布法规,成为世界第一个强行安装ESP的国家,要求所有总质量在4 5t以下的车辆从2012年起必须装配ESP㊂2009年欧洲议会做出决定:从2011年11月起,所有在欧盟注册的新乘用车和商用车都必须装配ESP,从2014年11月起所有新车都必须装配该系统㊂2009年,加拿大政府也推出新的交通安全法规,要求从2011年9月1日起,在加拿大境内销售的所有新下线乘用车,以及总质量在4 5t以下的商用车㊁卡车和公共汽车都必须安装ESP系统㊂2008年在澳大利亚销售的新车中ESP装配率已经达到60%,2009年6月澳大利亚颁布立法,要求自2011年11月起所有新车型以及自2013年11月起所有车型,都必须强制装配ESP[2]㊂2㊀我国ESP发展现状2 1㊀我国机动车运行安全标准偏低,影响ESP装车率由于我国机动车运行安全标准偏低,制约了ESP产品的推广使用,目前我国ESP装车率仅为22%㊂2012年修改后实施的GB7258-2012‘机动车运行安全技术条件“,并没有关于ABS系统和ESP系统相关强制性的标准,也就是说ESP系统可以不装,造成部分汽车生产商为降低生产成本而未安装㊂在国内市场,为数不少的跨国企业为了降低成本,将价格并不高昂的ESP系统作为车型系列中的高配车型的卖点进行宣传,而标配车型中通常并不安装㊂如日产阳光㊁丰田凯美瑞㊁卡罗拉等车辆的国外生产版均是全系标配电子稳定控制系统,但是国内生产版,只有中高配具备,标配车型均被删减㊂2 2㊀国内研发能力不高,影响ESP产品的开发我国ESP研发能力不高,生产还依赖于国外公司㊂国内的研究大多止于标准件层面,未深入分析液压元件具体结构及参数对ESP性能的影响[3]㊂清华大学王会义㊁宋健,吉林大学李静,合肥工业大学喻海军㊁胡延平等对ESP控制系统进行了深入研究,并取得较好效果㊂虽然近几年我国在ESP系统动力学建模㊁控制策略方面有较大的进步,但在实车匹配㊁产业化方面还需进一步加强㊂其主要原因:(1)模型的准确性和实时性之间的矛盾没有得到较好的解决[4];(2)ESP的控制系统的基础研究还没有深入[5]㊂3㊀对策3 1㊀提高汽车生产标准,强制安装ESP中国消费者汽车知识匮乏,安全意识还比较薄弱㊂国外品牌汽车在中国汽车市场对安全配置的减配,就有迎合中国消费者只喜欢高档内饰而不太重视安全的原因,但技术标准过低是一个客观原因[6]㊂实际上加装ESP的成本相对于整车而言是微乎其微的㊂根据美国高速公路安全管理局的调查:ESP作为基于ABS系统的衍生装置,在ABS基础上增加的成本仅有100多美元㊂要想让消费者认清减配的危害,在短期内比较难,只有相关法律法规的出台才是最好的保障,提高汽车生产标准㊁强制安装ESP是倒逼企业进行技术升级㊁提高产品质量唯一途径㊂3 2㊀加强政策支持,促进汽车ESP生产企业 转型升级 提高汽车生产标准,长期以来有种错误的观点:国内企业实力不强,如果强制安装一些安全配置,推高了整车成本,提高价格,竞争力降低,最后企业会因此而破产淘汰㊂如果说低门槛的技术标准是为了保护我国企业的生存,那么这种保护落后的政策迟早将被世界技术发展的潮流吞没㊂高标准看起来是一种负担,但如果把高标准看作是竞争的延伸,也是一种向前的动力㊂国家应加大对ESP高新制造企业的政策支持,减轻企业负担,让企业在与国外竞争对手的比拼中转型升级,成为ESP主流生产企业;同时,国家可以借鉴节能补贴㊁家电下乡等政策,通过财政手段支持汽车制造企业安装升级ESP,以提高车辆行驶安全性㊂3 3㊀借力 中国制造2025 ,加大科研投入中国制造2025 明确提出提高国家制造业创新能力,加强关键核心技术攻关,加速科技成果产业化,提高关键环节和重点领域的创新能力㊂2016年中国汽车工业协会发布的‘ 十三五 汽车工业发展规划意见“中,明确提出 积极发展智能网联汽车 是中国汽车工业的发展目标之一㊂汽车ESP系统与近距离雷达㊁远程雷达㊁定速巡航㊁无人驾驶等诸多技术结合在一起,是实现智能网联汽车㊁无人驾驶汽车的关键技术㊂因此,在举国推进实施 中国制造2025 的制造强国战略的历史机遇中,国内ESP生产企业应趁势而上,围绕ESP核心技术加大科研投入,形成从关键零部件到整车匹配的完整研发体系,达到国际先进水平㊂4㊀小结ESP是汽车主动安全的重要组成部分,由于我国机动车运行安全标准偏低,相对于已基本普及使用的欧美多数国家,我国ESP正处于推广阶段㊂我国在ESP核心技术研发㊁核心部件加工制造㊁整车匹配上与其他国家还有较大差距,产品研发能力有待提高㊂因此,提高机动车运行安全标准,强制安装ESP,加强政策支持,加大科研投入,促进产品开发,已迫在眉睫㊂参考文献:[1]高俊.我国是否应该立法强制安装ESP[N/OL].2014-12-01[2017-12-16].https://chejiahao.autohome.com.cn/info/1017447/.[2]刘坤.从ESP浅谈国内汽车市场现状[J].工程技术,2015(8):269.[3]李亮,宋健,韩宗奇,等.用于电子稳定程序ESP在线控制的液压模型和反模型[J].机械工程学报,2008,44(2):139-144.LIL,SONGJ,HANZQ,etal.HydraulicModelandInverseModelforElectronicStabilityProgramOnlineControlSystem[J].JournalofMechanicalEngineering,2008,44(2):139-144.[4]李亮,贾钢,宋健,等.汽车动力学稳定性控制研究进展[J].机械工程学报,2013,49(24):95-107.LIL,JIAG,SONGJ,etal.ProgressonVehicleDynamicsStabilityControlSystem[J].JournalofMechanicalEngineering,2013,49(24):95-107.[5]单东升,宋健,李亮.车身稳定控制液压控制单元性能试验台开发与试验[J].液压与气动,2011(6):51-54.SHANDS,SONGJ,LIL.TestPlatformDevelopmentandValidationofHydraulicControlUnitforVehicleStabilityControl[J].ChineseHydraulics&Pneumatics,2011(6):51-54.[6]哭晕厕所:流行全世界的汽车引进中国全流行减配[N/OL].2015-04-15[2017-12-17].http://www.sohu.com/a/10920770_111230.。
汽车电子稳定控制系统(ESP/ESC)历史解析网易汽车2月10日报道1987年,ESC系统的最早创新者奔驰和宝马最先在他们的汽车上装备了牵引力控制系统,这套牵引力控制系统可以通过针对每个车轮施加不同的制动力和驱动力来实现保持牵引力,这套系统与今天的ESC系统还不大一样,其设计初衷并不是为了辅助转向。
但牵引力控制系统就是ESC的前身。
在上世纪90年代间牵引力控制系统的名字叫TCL,自从三菱开始装备现代化的主动防滑及牵引力控制系统(ASTC)后这套系统开始了又一轮的进化。
此时的牵引力控制系统已经和现代的ESC系统大体一致了,它设计的目的中包括了帮助驾驶者在过弯时使得车辆按照预定路线行驶,车载电脑通过安置在车身四处的监测器获取并计算众多参数并使电子牵引力控制系统起作用。
比如在过弯时,如果油门轰得过大,车载电脑就会自动调节发动机的动力输出和制动系统以确保车辆无论行驶在何种路况下按照预定路线行驶。
传统的牵引力控制系统只设计了防滑控制功能,三菱的研究使得TCL系统实现了主动安全防护。
其具体方案就是通过主动调节牵引力来避免车辆转弯时出现过大的横向加速度。
尽管这还并不完全是现代意义的车身稳定控制系统,这套系统已经可以监测转向角、油门位置和每个车轮转速,当时并不包括对偏航率的监测。
TCL系统标配的防滑控制功能可以明显改善过弯时的打滑情况。
除此之外,三菱还通过装备集成Diamante的电子控制悬挂和四轮转向系统实现对车辆操控和性能整体性改进。
宝马和博世公司及大陆公司合作开发了一套系统通过减少发动机的扭矩来实现避免车辆失控,并于1992年在全部的旗下车型中装备。
1987年到1992年间,奔驰和博世合作研发了一套名为Electronic stability programm的系统,其英文的意思就是电子稳定程序,也就是我们今天常说的ESP,这是一套可以实现横向防滑控制的电子系统,名为ESC系统。
通用和Delphi于1997年时控制研发出了自己的ESC系统名为StabiliTrak,这套系统在旗下部分凯迪拉克汽车上装备。
汽车电子稳定控制系统(ESP/ESC)历史解析网易汽车2月10日报道1987年,ESC系统的最早创新者奔驰和宝马最先在他们的汽车上装备了牵引力控制系统,这套牵引力控制系统可以通过针对每个车轮施加不同的制动力和驱动力来实现保持牵引力,这套系统与今天的ESC系统还不大一样,其设计初衷并不是为了辅助转向。
但牵引力控制系统就是ESC的前身。
在上世纪90年代间牵引力控制系统的名字叫TCL,自从三菱开始装备现代化的主动防滑及牵引力控制系统(ASTC)后这套系统开始了又一轮的进化。
此时的牵引力控制系统已经和现代的ESC系统大体一致了,它设计的目的中包括了帮助驾驶者在过弯时使得车辆按照预定路线行驶,车载电脑通过安置在车身四处的监测器获取并计算众多参数并使电子牵引力控制系统起作用。
比如在过弯时,如果油门轰得过大,车载电脑就会自动调节发动机的动力输出和制动系统以确保车辆无论行驶在何种路况下按照预定路线行驶。
传统的牵引力控制系统只设计了防滑控制功能,三菱的研究使得TCL系统实现了主动安全防护。
其具体方案就是通过主动调节牵引力来避免车辆转弯时出现过大的横向加速度。
尽管这还并不完全是现代意义的车身稳定控制系统,这套系统已经可以监测转向角、油门位置和每个车轮转速,当时并不包括对偏航率的监测。
TCL系统标配的防滑控制功能可以明显改善过弯时的打滑情况。
除此之外,三菱还通过装备集成Diamante的电子控制悬挂和四轮转向系统实现对车辆操控和性能整体性改进。
宝马和博世公司及大陆公司合作开发了一套系统通过减少发动机的扭矩来实现避免车辆失控,并于1992年在全部的旗下车型中装备。
1987年到1992年间,奔驰和博世合作研发了一套名为Electronic stability programm的系统,其英文的意思就是电子稳定程序,也就是我们今天常说的ESP,这是一套可以实现横向防滑控制的电子系统,名为ESC系统。
通用和Delphi于1997年时控制研发出了自己的ESC系统名为StabiliTrak,这套系统在旗下部分凯迪拉克汽车上装备。
在汽车参数化中ESP系统的发展Hansung Lee, Kihong Park, Taehun Hwang, Keunje Noh1, Seung-Jin HeoJay Il Jeong, Seongho Choi, Byunghak Kwakand Sewoong Kim.(手稿收到时间2008年12月24日,修改稿收到时间2009年3月16日,收录于2009年3月16日)摘要在这项研究里,增强的横向稳定性控制系统被用于车辆的开发。
这项系统包括车辆参数估计系统和一个增强的ESP控制逻辑系统。
车辆参数估量系统是通过参考纵向动态的部件之间的物理位置关系来工作的。
增强型的ESP逻辑被成功设计,使得控制器能更好的适应车辆参数的变化,所有的系统部件在一个模拟环境中测试,当然车辆质量估计算法还要测实地测量。
结果表明设计的ESP系统可使车辆侧向极限稳定性大大提高。
关键词ESP(Electronic Stability Program)负载的自适控制最优化参数估计1 简介ESP(车身电子稳定系统)是一种电控底盘系统,它的目的就是在汽车进行临界转弯时维持汽车的横向稳定性。
在逻辑控制开始时ESP计算参考横摆角速度并作为以后的目标并使用横向汽车模型。
但是汽车参数的模型可以随着乘客和和负载的变化而剧烈的发生变化。
对于某些汽车总质量发生的变化有可能比整车的质量还要大。
因此拥有智能逻辑控制的ESP在汽车参数发生变化时就显得尤为重要,否则有可能在汽车转弯时使情况变得更糟。
之前,在许多在参数化领域的研究中,大部分都采用了递归最小二乘法,在汽车进行短暂的运动中这种不受约束的线性最小二乘法是比较可信的。
但是由于可能拥有不唯一的最优解决方案,可能使在大量的数学问题中提取物理参数这一过程变得困难。
博世最近做的一些研究表明通过对汽车质量的估计,ESP可以极大的提高制动效能和制动稳定性。
在这项研究中,一种增强型的ESP 被开发并用于乘用车中。
这种系统包含有两部分:汽车的参数估量部分和增强的ESP 控制逻辑。
车辆参数估量系统是通过参考纵向动态的部件之间的物理位置关系来工作的。
这种增强型的ESP 控制在设计的过程中运用的比例—积分—微分技术(PID ),用来检测车辆的参数在一定合适范围内,并通过最轨迹优化的方法做出了一个PID 的查询表。
所有的系统中的元件都在一个一个模拟的环境中得到验证。
其中CarSim 模型代替了实车进行测试。
但是汽车质量估测算法只能在适当的修改后进行测试,所以它只能够在信号传感器安装的实车中进行。
2 基于模型的质量估算汽车质量估计算法首先开发应用在动力总成上,如图。
这个模型包括发动机,液力变矩器,变速器,主减速器,车轮,它们之间的等量关系满足:EOUT T =E E EIN J T ϖ-(1)在这个发动机模型(1)中,EIN T (EOUT T )是发动机的输入输出扭矩,e ω是发动机的转速,E J 是转动惯量。
液力变矩器是根据查表得到它的特性曲线的。
在这个变速模型(2)中,TOUT TMIN T T 是变速器的输出扭矩,tm ω是角速度,TM J 是旋转惯量,tm i 是传动比。
在后桥的模型(3)中,)(FDO UT FDIN T T 是后桥的输出转矩,FD I 是传动比。
在模型(4)中,W F 是轮胎的摩擦阻力,f r 是车轮有效半径,W J 是轮胎的转动惯量。
x a 是车轮的纵向加速度。
一旦轮胎的摩擦力确定,那么汽车的质量M 就可以通过以下的等式来确定:AeroRolling W x R R F ma --=在上式中,RollingR 是滚动阻力,Aero R 是气动阻力,它们在这个研究中是由经验算法得到的,如图表2。
在图表中可以看出不同速度下各个阻力的大小,表明在低速时滚动阻力占据主导地位,并且趋向于常数。
这节的中基于模型的质量估算方法用的是CarSim 汽车模型,最大估计误差在百分之二以内。
3 信号传感器中的质量估算这节介绍另外一种质量估算方法,它是基于之前的算法,但是经过修改简化应用于实车中。
在CarSim 汽车模型中(在第二章应用的)在传动系中摩擦造成损耗被忽略,而且转动惯量并没有精确的估算,为了改善在实车中的质量估算的准确性,这些部件首先应用于汽车测试中。
当汽车在定速巡航时候,一个小开度的节气门(产生的动力)就能抵挡住所有的汽车阻力。
折可以用下面的式子表示:affFD tm TC Eout Totalr i i R T R =(6)在(6)式中,TC T 是从液力变矩器或得的转矩,total T 是总的阻力,它包括滚动阻力,空气阻力,和传动系损失的摩擦力。
运用这个等式,在不同档位时摩擦损失就可以被发现。
一旦传动系中的摩擦损失被计算出来,那么传动系的转动惯量就可以从一个恒加速度测试中通过(7)式测算出来。
T代表传动系惯量的等效转矩。
在这个式子中I表1 ——质量估算运算条件。
表2——实际估算测量数据。
图表3——测试的估算质量。
这章的质量估测算法需要一些特定的车辆瞬态的纵向动力学,所以在适当的时间进行质量估测成为这个算法中最关键的问题。
表1列出了进行这种算法需要的条件。
图表3展示了由是啊眼得出的质量估算结果。
汽车的货箱当载有300kg的负载时,从节气门静止状态施加一个阶跃加速输入,在这项测试中,最大的纵向加速度大约为0.2g。
在图3中,阴影部分的面积是满足表1时的结果。
表2给出了其他不同负载的质量估算结果。
表2表明这章的质量估算法在质量大范围变化是提供了一个相当可靠运算结果。
这可以从估算误差中看出来,最大误差也没有超过1.5% 。
4 增强的ESP系统图4展现了在这个研究中增强型ESP的配置,当需要估测的质量变化超过一定的范围时,用于计算目标横摆率为ESP参考的汽车模型是依据质量和速度而不断更新的,而且ESP控制增益也随着PID查询表不断更新。
图表4——增强型ESP的配置图图表5——PID增益的轨迹优化为了确定特征速度和PID控制对不同车辆重量的增益,制作了离线的轨迹优化表。
图5显示了找到最佳的PID增益框图通过轨迹优化的车辆质量的不同值的ESP逻辑。
不同的车辆质量特征速度也发现相似,所以CarSim模型和2DOF自行车模型之间的稳态横摆角速度误差被降低。
5 模拟结果在这一章节中给出了在研究中增强型的ESP的仿真分析结果,在摩擦系数为0.9的道路上进行双移线试验,车速保持在80km/h,方向盘的转角在 120度内。
在进行性能验证时,将增强型的ESP系统和普通的ESP系统不带有自适控制的进行对比。
图表6展示了普通的没有装配LAC和额外负载的ESP的仿真结果,表明了该控制器能敏捷的捕捉到横摆角速度的变化。
图表7展示了一个没有装配有LAC的ESP系统但具有500kg负载时车辆的轨迹。
结果表明汽车不能变换车道,这是由于参考额定横摆角速度和控制器增益是在车辆没有任何负载的条件下的模型。
从图表8中可以看出,装配有增强型ESP系统并且载有500kg的负载时,汽车可以在规定的横摆角度下进行换道,并且没有出现侧向失稳的现象。
图表6——无负载和无LAC下的ESP图7——没有装配LAC且具有500kg负载的ESP(a)横摆角速度(b)轨迹曲线图——(8)增强型的ESP并且载有500kg负载6 结论本文主要讲述开发了一个增强的横向稳定系统,这个系统主要包括;车辆参数估测部分,一个增强型的ESP控制逻辑部分。
汽车参数估测部分主要是在汽车纵向动力学中物理关系的进行估测,增强的ESP逻辑被开发使得控制器能够更好的察觉到汽车参数的变化。
所有的系统部件都在模拟的环境下进行测试,当然质量估测算法也进行了实地的测量,试验结果表明在设计的ESP系统下汽车的横向极限稳定性得到较大的提高。
7 感谢这项工作得到了韩国国民大学研究机构的大力支持,也得到了韩国万都集团的大力支持。
8 参考文献[1] S. J. Lee, K. Park and T. H. Hwang, J. H. Hwang, Y.C. Jung, and Y. J. Kim, Development of hardwarein-the-loop simulation system as a testbench for ESP unit, International Journal of Automotive Technology, 8 (2) (2007) 203-209.[2] K. Huh, S. Lim and J. Jung, Vehicle mass estimator for adaptive roll stability control, SAE Technical papers, (2007) 04-16-2007.[3] A. Vahidi, A. Stefanopoulou, and H. Peng, Recursive least squares with forgetting for online estimationof vehicle mass and road grade: theroy and experiments, Vehicle System Dynamics, 43 (1) (2005) 31-55.[4] E. Liebemann, T. Fuhrer and P. Kroger, Light commercial vehicles - challenges for vehicle stabilitycontrol, Proc. of International Technical Conference on the Enhanced Safety of Vehicles, Lyon, France, (2007) 07-0269.作者简介:1986年毕业于首尔国立大学,并获得机械设计及其制造学士学位,1990年获得康奈尔大学机械硕士学位,1994年或得康奈尔大学博士学位。
现在就职于汉城韩国国民大学机械与汽车工程学院,博士生导师,主要研究方向在智能车辆和底盘控制设计。