现代控制理论习题解答(第一章)
- 格式:pdf
- 大小:170.69 KB
- 文档页数:18

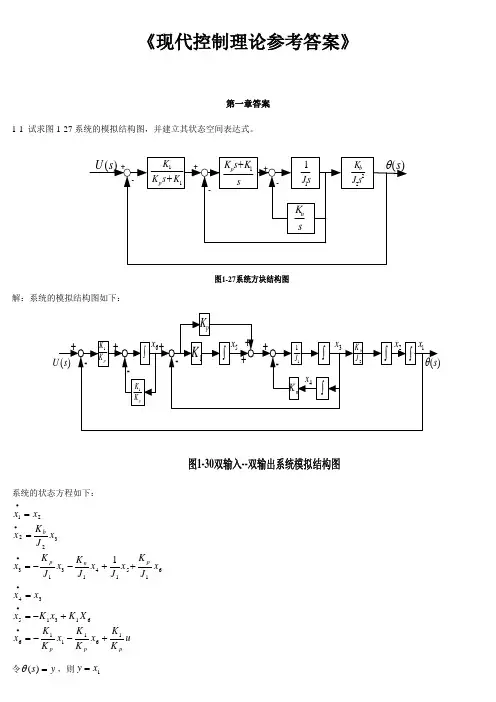
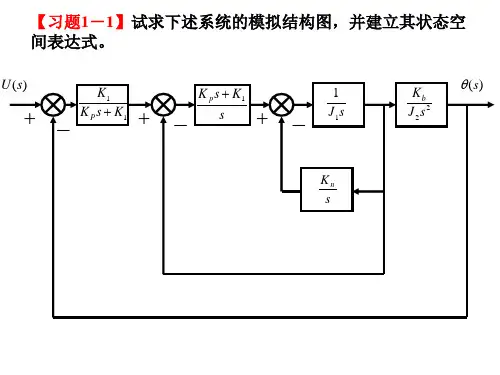
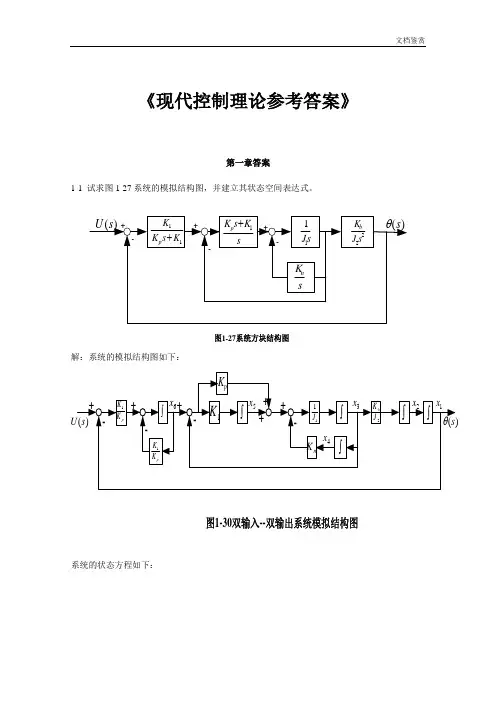
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得2221332222213*********1x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示: 1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令..3.21y x y x y x ===,,,则有 相应的模拟结构图如下:1-6 (2)已知系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:ss s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++=1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x ‘(1) 画出其模拟结构图(2) 求系统的传递函数 解:(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W 1-8 求下列矩阵的特征矢量(3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6712203010A 解:A 的特征方程 061166712230123=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---=-λλλλλλλA I 解之得:3,2,1321-=-=-=λλλ当11-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---3121113121116712203010p p p p p p 解得: 113121p p p -== 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P (或令111-=p ,得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P ) 当21-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---32221232221226712203010p p p p p p 解得: 1232122221,2p p p p =-= 令212=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=14222122p p p P(或令112=p ,得⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=21213222122p p p P ) 当31-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---33231333231336712203010p p p p p p 解得: 133313233,3p p p p =-= 令113=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3313323133p p p P 1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32121321321110021357213311201214x x x y y u x x x x x x解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I 当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P 当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p 解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P 当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--23132313311201214p p p p p p解之得3323132,0p p p == 令133=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P约旦标准型1-10 已知两系统的传递函数分别为W 1(s)和W 2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解:(1)串联联结 (2)并联联结1-11 (第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为 求系统的闭环传递函数 解:1-11(第2版教材) 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为 求系统的闭环传递函数 解:1-12 已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u 的系数b(即控制列阵)为 (1)⎥⎦⎤⎢⎣⎡=11b 解法1: 解法2:求T,使得⎥⎦⎤⎢⎣⎡=-111B T 得⎥⎦⎤⎢⎣⎡=-10111T 所以 ⎥⎦⎤⎢⎣⎡-=1011T 所以,状态空间表达式为第二章习题答案2-4 用三种方法计算以下矩阵指数函数At e 。
第一章自动控制的一般概念一.是非题1.开环控制是一种反馈控制(×)2.开环控制的稳定性比闭环控制的稳定性要好(×)3.线形系统的主要特点是具有齐次性和叠加性(√)4.线性定常系统的各项系数是与时间有关的(×)5.闭环控制的控制精度在很大程度上由形成反馈的测量元件的精度决定的(√)6.自动控制就是采用控制装置使被控对象自动的按给定的规律运行,使被控对象的一个或数个物理量能够在一定的精度范围内按给定的规律变化(√)7.自动控制系统有两种最基本的控制形式即开环控制,闭环控制(√)二.选择题1.下述(D)不属于对闭环控制系统的基本要求。
(A)稳定性(B)准确性(C)快速性(D)节能性2.自动控制系统一般由(D)组成(A)输入和输出(B)偏差和反馈(C)控制量和扰动(D)控制器和被控对象3.在组成系统的元件中,(A),即为非线形系统(A)只要有一个元、器件的特性是非线形的(B)有且只有一个元、器件的特性是非线形的(C)两个及两个以上的元、器件的特性是非线形的(D)所有的元器件的特性都是非线形的4.古典控制理论形成于(D)(A)2000年前(B)1000年前(C)100年前(D)20 世纪20-40年代5.对于一个自动控制、系统的性能要求可以该概括为三个方面:(A)快速性和准确性(A)稳定性(B)定常性(C)振荡性(D)抗干扰性6.传递函数的概念除了适用于定常系统之外,还可以描述(A)系统(A)线形时变(B)非线性定常(C)非线形时变( D )以上都不是7.在控制系统中被控制的物理量是被控量,直接改变被变量的元件称为(A)(A)执行元件(B)控制元件(C)调节器(D)测量元件8.在通常的闭环控制系统结构中,系统的控制器和控制对象共同构成了(B)(A)开环传递函数(B)前向通道(C)反馈通道(D)闭环传递函数9.下面数学模型中(D)是线形定常系统的外部描述(A)传递函数(B)微分方程(C)频率特性(D)前面三种都是三.填空题1.自动控制系统的两种最基本形式即开环控制,闭环控制。
现代控制理论第版课后习题答案Prepared on 22 November 2020《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示: 1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令..3.21y x y x y x ===,,,则有相应的模拟结构图如下: 1-6 (2)已知系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:ss s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++= 1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x ‘(1) 画出其模拟结构图 (2) 求系统的传递函数 解:(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W 1-8 求下列矩阵的特征矢量(3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6712203010A 解:A 的特征方程 061166712230123=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---=-λλλλλλλA I 解之得:3,2,1321-=-=-=λλλ当11-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---3121113121116712203010p p p p p p 解得: 113121p p p -== 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P(或令111-=p ,得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P ) 当21-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---32221232221226712203010p p p p p p 解得: 1232122221,2p p p p =-= 令212=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1423222122p p p P(或令112=p ,得⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=21213222122p p p P )当31-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---33231333231336712203010p p p p p p 解得: 133313233,3p p p p =-= 令113=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3313323133p p p P1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32121321321110021357213311201214x x x y y u x x x x x x解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I 当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p 解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--332313332313311201214p p p p p p 解之得3323132,0p p p == 令133=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P约旦标准型1-10 已知两系统的传递函数分别为W 1(s)和W 2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解:(1)串联联结 (2)并联联结1-11 (第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材) 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数 解:1-12 已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u 的系数b(即控制列阵)为(1)⎥⎦⎤⎢⎣⎡=11b解法1: 解法2:求T,使得⎥⎦⎤⎢⎣⎡=-111B T 得⎥⎦⎤⎢⎣⎡=-10111T 所以 ⎥⎦⎤⎢⎣⎡-=1011T 所以,状态空间表达式为第二章习题答案2-4 用三种方法计算以下矩阵指数函数At e 。
现代控制理论课后习题答案第⼀章习题1.2求下列多项式矩阵()s D 和()s N 的两个不同的gcrd:()2223(),()1232s s s s s s s s s ??++== ? ?+-??D N 解:()()22232321s s s s s s s++ =++ ? ?D S N S ; ()3r 2,1,2E -:223381s s s s s s ??++ ?-- ? ???;()3r 2,3,3E :223051s s s s s ??++ ?- ? ???;()3r 1,3,2E s --:01051s s ?? ?- ? ;()3r 2,1,5E s -:01001s ?? ?;()3r 3,1,1E -:01000s ?? ? ? ???;()1r 2,3E :01000s ?? ? ? ???;()1r 1,2E :00100s ?? ?;所以⼀个gcrd 为001s ??;取任⼀单模矩阵预制相乘即可得另⼀个gcrd 。
1.9 求转移矩阵t A e (1)已知1141??=A ,根据拉⽒反变换求解转移矩阵tA e 。
(2) 已知412102113-?? ?= ? ?-??A ,根据C-H 有限项展开法求解转移矩阵t A e 。
解:(1)11()41s s s --??-= ?--??I A1110.50.50.250.2511(3)(1)(3)(1)13131()4141110.50.5(3)(1)(3)(1)(3)(1)3131s s s s s s s s s s s s s s s s s s s s s s s --+---+-+??-+-+ ? ?-=== ? ?---+ ?-+ ? ?-+-+-+-+?I A 3311330.5e 0.5e 0.25e 0.25e e ()e e 0.5e 0.5e t t t t t t tt t s ------??+-??=-= ??? ?-+?A L I A (2)由2412()12(1)(3)0113λλλλλλ--?? ?=--=--= ? ?--??A I -,得1,233,1λλ== 对1,23λ=,可以计算1,2()2rank λ=A I -,所以该特征值的⼏何重数为1。
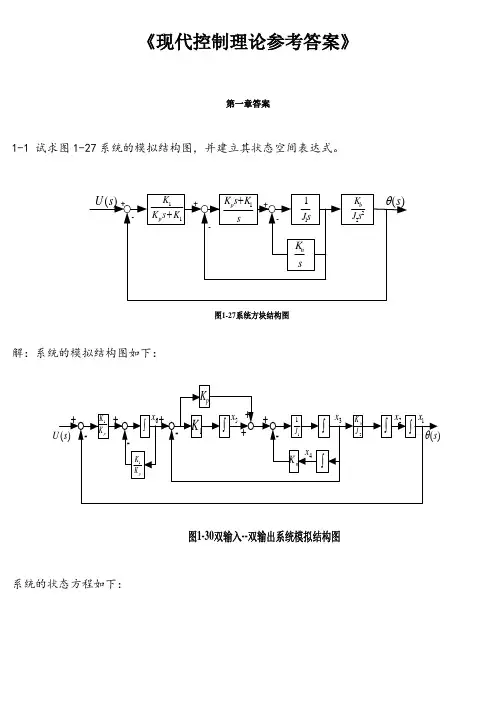
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••6543211654321111111126543210000010000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2有电路如图1-28所示。
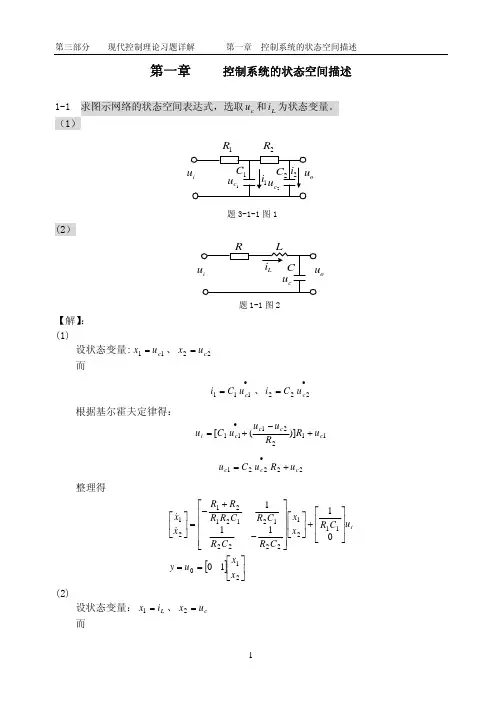
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
L1L2U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K x K x K x X K x K x x x x J K x J x J K x J K x x J K x x x p n pb1611166131534615141313322211+--=+-==++--===••••••——所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:——[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
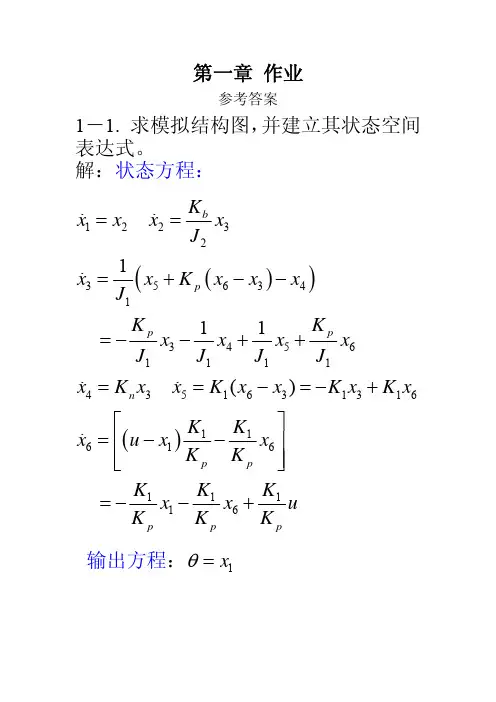
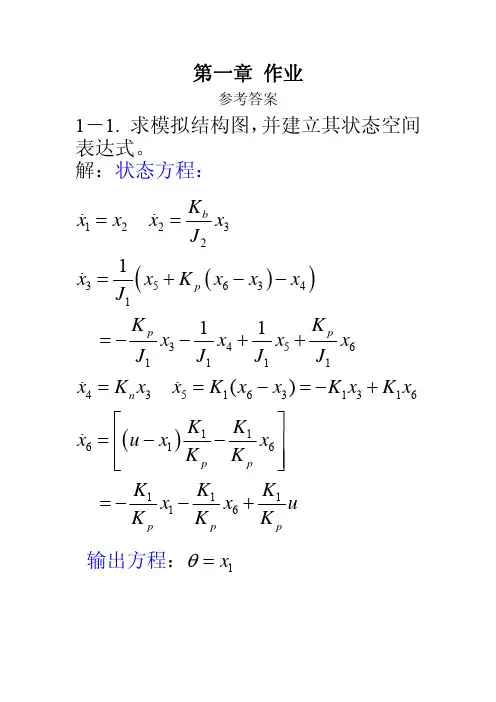
第一章 作业参考答案1-1. 求模拟结构图,并建立其状态空间表达式。
解:状态方程:()()()1223235634134561111435163131161611116111()bp pp n p p p p p K xx x x J xx K x x x J K K x x x x J J J J 16xK x xK x x K x K x K K x u x x K K K K K x x u K K K ===+--=--++==-=-+⎡⎤=--⎢⎥⎢⎥⎣⎦=--+输出方程:1x θ=矩阵形式: =xAx +B u y =Cx 其中:211111110100000000011000000000000000b 1p p n p p K J K K J J J J K K K K K K K ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥--⎢⎥⎣⎦A = 100000Tp K B K ⎡⎤=⎢⎥⎢⎥⎣⎦[]100000C =;1-3. 图1-29机械系统。
1M 2M 受外力作用1f 2f 作用,求1M 2M 运动速度输出的状态空间表达式。
解:微分方程111112112()()M yf K c c B y y =---- 22222221121()12()M yf K c B y K c c B =--+-+ y y - 设状态变量[]1212Tc c y y x =[]12Ty y y =,[]12Tf f =u令11x c =,22x c =,31x y =,42x y = 13xx = 24xx = 1111312341111111K K B B x x x x x M M M M M =-+-++ f1121214124322221K K K B B B x x x x x M M M M M ++=--++22f所以 =xAx +B u y =Cx 其中:11111111112112220100001K K B B M M M M K K K B B B M M M M ⎡⎤⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥++⎢⎥--⎢⎥⎣⎦A =22 1200001010B M M ⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦C 00100001⎡⎤=⎢⎥⎦ ⎣1-5. 根据微分方程,写状态方程,画模拟结构图。
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc ---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CC L L R L L R x x x 。
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
现代控制理论参考答案第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式; 解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示;以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程; 解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵;解:系统的状态空间表达式如下所示: 1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图; 解:令..3.21y x y x y x ===,,,则有 相应的模拟结构图如下: 1-6 2已知系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:ss s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++=1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x ‘(1) 画出其模拟结构图(2) 求系统的传递函数 解:2⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W 1-8 求下列矩阵的特征矢量3⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6712203010A 解:A 的特征方程 061166712230123=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---=-λλλλλλλA I 解之得:3,2,1321-=-=-=λλλ当11-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---3121113121116712203010p p p p p p 解得: 113121p p p -== 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P 或令111-=p ,得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P 当21-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---32221232221226712203010p p p p p p解得: 1232122221,2p p p p =-= 令212=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1423222122p p p P或令112=p ,得⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=21213222122p p p P 当31-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---33231333231336712203010p p p p p p 解得: 133313233,3p p p p =-= 令113=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3313323133p p p P 1-9将下列状态空间表达式化成约旦标准型并联分解2⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32121321321110021357213311201214x x x y y u x x x x x x解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I 当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P 当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P 当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--332313332313311201214p p p p p p 解之得3323132,0p p p == 令133=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P约旦标准型1-10 已知两系统的传递函数分别为W 1s 和W 2s试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解:1串联联结 2并联联结1-11 第3版教材已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为 求系统的闭环传递函数 解:1-11第2版教材 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为 求系统的闭环传递函数 解:1-12 已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u 的系数b 即控制列阵为 1⎥⎦⎤⎢⎣⎡=11b 解法1: 解法2:求T,使得⎥⎦⎤⎢⎣⎡=-111B T 得⎥⎦⎤⎢⎣⎡=-10111T 所以 ⎥⎦⎤⎢⎣⎡-=1011T 所以,状态空间表达式为第二章习题答案2-4 用三种方法计算以下矩阵指数函数At e ;2 A=1141⎛⎫⎪⎝⎭解:第一种方法: 令0I A λ-=则11041λλ--=-- ,即()2140λ--=;求解得到13λ=,21λ=- 当13λ=时,特征矢量11121p p p ⎡⎤=⎢⎥⎣⎦由 111Ap p λ=,得11112121311341p p p p ⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦即112111112121343p p p p p p +=⎧⎨+=⎩,可令112p ⎡⎤=⎢⎥⎣⎦当21λ=-时,特征矢量12222p p p ⎡⎤=⎢⎥⎣⎦由222Ap p λ=,得121222221141p p p p -⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦即1222121222224p p p p p p +=-⎧⎨+=-⎩ ,可令212p ⎡⎤=⎢⎥-⎣⎦则1122T ⎡⎤=⎢⎥-⎣⎦,111241124T -⎡⎤⎢⎥=⎢⎥⎢⎥-⎢⎥⎣⎦第二种方法,即拉氏反变换法:第三种方法,即凯莱—哈密顿定理 由第一种方法可知13λ=,21λ=-2-5 下列矩阵是否满足状态转移矩阵的条件,如果满足,试求与之对应的A 阵;3()22222222t tt t ttt t e e e e t e e e e --------⎡⎤--Φ=⎢⎥--⎣⎦ 4()()()()3333112412t t t t t tt t e e e e t e e e e ----⎡⎤+-+⎢⎥Φ=⎢⎥⎢⎥-++⎢⎥⎣⎦解:3因为 ()10001I ⎡⎤Φ==⎢⎥⎣⎦,所以该矩阵满足状态转移矩阵的条件 4因为()10001I ⎡⎤Φ==⎢⎥⎣⎦,所以该矩阵满足状态转移矩阵的条件2-6 求下列状态空间表达式的解:初始状态()101x ⎡⎤=⎢⎥⎣⎦,输入()u t 时单位阶跃函数;解: 0100A ⎡⎤=⎢⎥⎣⎦ 因为 01B ⎡⎤=⎢⎥⎣⎦,()()u t I t =2-9 有系统如图所示,试求离散化的状态空间表达式;设采样周期分别为T=和1s,而1u 和2u 为分段常数; 图 系统结构图 解:将此图化成模拟结构图 列出状态方程则离散时间状态空间表达式为 由()At G T e =和()0TAt H T e dtB =⎰得:当T=1时 ()()()()11111001111k e e x k x k u k e ke ----⎡⎤-⎡⎤+=+⎢⎥⎢⎥--⎢⎥⎣⎦⎣⎦当T=时 ()()()()()0.10.10.10.11001110.90.1k e e x k x k u k e k e ----⎡⎤-⎡⎤⎢⎥+=+⎢⎥⎢⎥---⎣⎦⎣⎦第三章习题3-1判断下列系统的状态能控性和能观测性;系统中a,b,c,d 的取值对能控性和能观性是否有关,若有关,其取值条件如何 1系统如图所示: 解:由图可得: 状态空间表达式为:由于•2x 、•3x 、•4x 与u 无关,因而状态不能完全能控,为不能控系统;由于y 只与3x 有关,因而系统为不完全能观的,为不能观系统; 3系统如下式:解:如状态方程与输出方程所示,A 为约旦标准形;要使系统能控,控制矩阵b 中相对于约旦块的最后一行元素不能为0,故有0,0≠≠b a ;要使系统能观,则C 中对应于约旦块的第一列元素不全为0,故有0,0≠≠d c ; 3-2时不变系统试用两种方法判别其能控性和能观性; 解:方法一:方法二:将系统化为约旦标准形;⎥⎦⎤⎢⎣⎡=1-111T ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=21212121T 1- B T -1中有全为零的行,系统不可控;CT 中没有全为0的列,系统可观; 3-3确定使下列系统为状态完全能控和状态完全能观的待定常数i i βα和 解:构造能控阵:要使系统完全能控,则211αα≠+,即0121≠+-αα 构造能观阵:要使系统完全能观,则121αα-≠-,即0121≠+-αα 3-4设系统的传递函数是1当a 取何值时,系统将是不完全能控或不完全能观的 2当a 取上述值时,求使系统的完全能控的状态空间表达式; 3当a 取上述值时,求使系统的完全能观的状态空间表达式; 解:1 方法1 :)6)(3)(1()()()(++++==s s s as s u s y s W 系统能控且能观的条件为Ws 没有零极点对消;因此当a=1,或a=3或a=6时,系统为不能控或不能观; 方法2:系统能控且能观的条件为矩阵C 不存在全为0的列;因此当a=1,或a=3或a=6时,系统为不能控或不能观;2当a=1, a=3或a=6时,系统可化为能控标准I 型3根据对偶原理,当a=1, a=2或a=4时,系统的能观标准II 型为 3-6已知系统的微分方程为:u y y y y 66116...=+++试写出其对偶系统的状态空间表达式及其传递函数; 解:63611603210=====b a a a a ,,,,系统的状态空间表达式为 传递函数为其对偶系统的状态空间表达式为: 传递函数为61166)(23+--=s s s s W 3-9已知系统的传递函数为 试求其能控标准型和能观标准型;解:345213486)(222++++=++++=s s s s s s s s W系统的能控标准I 型为 能观标准II 型为3-10给定下列状态空间方程,试判别其是否变换为能控和能观标准型;解:[]100210311032010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=C b A ,, 3-11试将下列系统按能控性进行分解1[]111,100,340010121-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=C b A 解:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--==9310004102b A Ab bM rankM=2<3,系统不是完全能控的; 构造奇异变换阵c R :⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡==010*********R Ab R b R ,,,其中3R 是任意的,只要满足c R 满秩;即⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=031100010c R 得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=-010*******c R 3-12 试将下列系统按能观性进行结构分解1 []111,100,340010121-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=C b A 解: 由已知得[]111,100,340010121-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=C b A 则有⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=4742321112CA CA C Nrank N=2<3,该系统不能观构造非奇异变换矩阵10R -,有10111232001R --⎡⎤⎢⎥=-⎢⎥⎢⎥⎣⎦ 则0311210001R --⎡⎤⎢⎥=-⎢⎥⎢⎥⎣⎦3-13 试将下列系统按能控性和能观性进行结构分解1[]211,221,102322001=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=C b A 解:由已知得211121226202M A Ab Ab ⎡⎤⎢⎥⎡⎤==⎣⎦⎢⎥⎢⎥-⎣⎦rank M=3,则系统能控 rank N=3,则系统能观所以此系统为能控并且能观系统取211121226202c T ⎡⎤⎢⎥=⎢⎥⎢⎥-⎣⎦,则1217344173215344c T -⎡⎤-⎢⎥⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥-⎢⎥⎣⎦则002105014A ⎡⎤⎢⎥=-⎢⎥⎢⎥⎣⎦,12100c B T b -⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦,[]271323c c cT == 3-14求下列传递函数阵的最小实现; 1 ()111111w s s ⎡⎤=⎢⎥+⎣⎦解: 01α=,01111B ⎡⎤=⎢⎥⎣⎦,1001c A -⎡⎤=⎢⎥-⎣⎦ 1001c B ⎡⎤=⎢⎥⎣⎦,1111c C ⎡⎤=⎢⎥⎣⎦,0000c D ⎡⎤=⎢⎥⎣⎦ 系统能控不能观取101101R -⎡⎤=⎢⎥⎣⎦,则01101R -⎡⎤=⎢⎥⎣⎦所以10010ˆ01A R AR --⎡⎤==⎢⎥-⎣⎦,1011ˆ01c B R B -⎡⎤==⎢⎥⎣⎦ 010ˆ10c C C R ⎡⎤==⎢⎥⎣⎦,00ˆ00D ⎡⎤=⎢⎥⎣⎦所以最小实现为ˆ1m A =,[]ˆ11m B =,1ˆ1m C ⎡⎤=⎢⎥⎣⎦,00ˆ00m D ⎡⎤=⎢⎥⎣⎦ 验证:()()1111ˆˆˆ111m mm C sI A B w s s -⎡⎤-==⎢⎥+⎣⎦3-15设1∑和2∑是两个能控且能观的系统1试分析由1∑和2∑所组成的串联系统的能控性和能观性,并写出其传递函数; 2试分析由1∑和2∑所组成的并联系统的能控性和能观性,并写出其传递函数; 解: 11∑和2∑串联当1∑的输出1y 是2∑的输入2u 时,331222x x x x =-++010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=--+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦,[]001y x = 则rank M=2<3,所以系统不完全能控; 当2∑得输出2y 是1∑的输入1u 时011034100021x x u ⎡⎤⎡⎤⎢⎥⎢⎥=--+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦,[]210y x = 因为 2001016124M bAbA b ⎡⎤⎢⎥⎡⎤==-⎣⎦⎢⎥⎢⎥--⎣⎦rank M=3 则系统能控因为2210321654c N cA cA ⎡⎤⎡⎤⎢⎥⎢⎥==--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦rank N=2<3 则系统不能观 21∑和2∑并联010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=--+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦,[]211y x = 因为rank M=3,所以系统完全能控 因为rank N=3,所以系统完全能观现代控制理论第四章习题答案4-1判断下列二次型函数的符号性质:1222123122313()31122Q x x x x x x x x x x =---+-- 2222123122313()4262v x x x x x x x x x x =++--- 解:1由已知得110∆=-<,2112013-∆==>-,31111711302411112--∆=--=-<--- 因此()Q x 是负定的 2由已知得110∆=>,2113014-∆==>-,3111143160131--∆=--=-<--因此()Q x 不是正定的 4-2已知二阶系统的状态方程:试确定系统在平衡状态处大范围渐进稳定的条件;解:方法1:要使系统在平衡状态处大范围渐进稳定,则要求满足A 的特征值均具有负实部;即:有解,且解具有负实部; 即:1122112212210a a a a a a +<>且方法2:系统的原点平衡状态0e x =为大范围渐近稳定,等价于T A P PA Q +=-;取Q I =,令11121222PP P P P ⎡⎤=⎢⎥⎣⎦,则带入TA P PA Q +=-,得到 若 11211211222111221122122112222204()()0022a a a a a a a a a a a a a a +=+-≠,则此方程组有唯一解;即 其中11221221det A A a a a a ==- 要求P 正定,则要求 因此11220a a +<,且det 0A >4-3试用lyapunov 第二法确定下列系统原点的稳定性;11123x x -⎡⎤=⎢⎥-⎣⎦ 21111x x -⎡⎤=⎢⎥--⎣⎦解:1系统唯一的平衡状态是0e x =;选取Lyapunov 函数为2212()0V x x x =+>,则 ()V x •是负定的;x →∞,有()V x →∞;即系统在原点处大范围渐近稳定;2系统唯一的平衡状态是0e x =;选取Lyapunov 函数为2212()0V x x x =+>,则 ()V x •是负定的;x →∞,有()V x →∞;即系统在原点处大范围渐近稳定;4-6设非线性系统状态方程为: 试确定平衡状态的稳定性;解:若采用克拉索夫斯基法,则依题意有: 取P I =很明显,()Q x 的符号无法确定,故改用李雅普诺夫第二法;选取Lyapunov 函数为2212()0V x x x =+>,则()V x •是负定的;x →∞,有()V x →∞;即系统在原点处大范围渐近稳定;4-9设非线性方程:试用克拉索夫斯基法确定系统原点的稳定性; 解:1采用克拉索夫斯基法,依题意有:x →∞,有()V x →∞; 取P I =则2121013()132x Q x x ⎡⎤-+=⎢⎥-+⎣⎦,根据希尔维斯特判据,有: 2221121210310310132x x x -∆=∆==->-+,(),()Q x 的符号无法判断; 2李雅普诺夫方法:选取Lyapunov 函数为421233()042V x x x =+>,则 ()V x •是负定的;x →∞,有()V x →∞;即系统在原点处大范围渐近稳定;4-12试用变量梯度法构造下列系统的李雅普诺夫函数 解:假设()V x 的梯度为: 计算()V x 的导数为:选择参数,试选112212211,0a a a a ====,于是得:12x V x ⎛⎫∇= ⎪⎝⎭,显然满足旋度方程12122121,0V V x xx x x x ∂∇∂∇∂∂===∂∂∂∂即,表明上述选择的参数是允许的;则有:如果121211202x x x x -><或,则()V x •是负定的,因此,1212x x <是12x x 和的约束条件; 计算得到()V x 为:()V x 是正定的,因此在121211202x x x x -><即范围内,0e x =是渐进稳定的;现代控制理论第五章习题答案5-1已知系统状态方程为:试设计一状态反馈阵使闭环系统极点配置为-1,-2,-3; 解:依题意有:2011012112M bAbA b ⎡⎤⎢⎥⎡⎤==⎣⎦⎢⎥⎢⎥⎣⎦3rankM =,系统能控; 系统0(,,)A b C =∑的特征多项式为:则将系统写成能控标准I 型,则有010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦; 引入状态反馈后,系统的状态方程为:()x A bK x bu =++,其中3K ⨯为1矩阵,设[]012K k k k =,则系统(,,)K A bK C =∑的特征多项式为:根据给定的极点值,得到期望特征多项式为:比较*()()f f λλ与各对应项系数,可解得:012599k k k =-=-=-,则有:[]-5-9-9K =;5-3有系统:(1) 画出模拟结构图;(2) 若动态性能不满足要求,可否任意配置极点 (3) 若指定极点为-3,-3,求状态反馈阵; 解1系统模拟结构图如下:2系统采用状态反馈任意配置极点的充要条件是系统0(,,)A b C =∑完全能控; 对于系统0(,,)A b C =∑有: []0111M bAb ⎡⎤==⎢⎥-⎣⎦2rankM =,系统能控,故若系统动态性能不满足要求,可任意配置极点;3系统0(,,)A b C =∑的特征多项式为:则将系统写成能控标准I 型,则有010231x x u ⎡⎤⎡⎤=+⎢⎥⎢⎥--⎣⎦⎣⎦; 引入状态反馈后,系统的状态方程为:()x A bK x bu =++,设[]01K k k =,则系统(,,)KA bK C =∑的特征多项式为:根据给定的极点值,得到期望特征多项式为:比较*()()f f λλ与各对应项系数,可解得:[]017373k k K =-=-=--,; 5-4设系统传递函数为试问能否利用状态反馈将传递函数变成 若有可能,试求出状态反馈K ,并画出系统结构图;解:6522)3)(2)(1()2)(1()(232--+-+=+-++-=s s s s s s s s s s s W由于传递函数无零极点对消,因此系统为能控且能观; 能控标准I 型为 令[] 210k k k K =为状态反馈阵,则闭环系统的特征多项式为由于状态反馈不改变系统的零点,根据题意,配置极点应为-2,-2,-3,得期望特征多项式为比较 )(λf 与 )(*λf 的对应项系数,可得 即[]52118---=K 系统结构图如下:5-5使判断下列系统通过状态反馈能否镇定;11222 A 011,01011b ---⎡⎤⎡⎤⎢⎥⎢⎥=-=⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦解:系统的能控阵为:2240010115M bAbA b -⎡⎤⎢⎥⎡⎤==⎣⎦⎢⎥⎢⎥-⎣⎦3rankM =,系统能控; 由定理 5.2.1可知,采用状态反馈对系统0(,,)A b C =∑任意配置极点的充要条件是(,,)A b C =∑完全能控;又由于3rankM =,系统0(,,)A b C =∑能控,可以采用状态反馈将系统的极点配置在根平面的左侧,使闭环系统镇定; 5-7设计一个前馈补偿器,使系统 解耦,且解耦后的极点为1,1,2,2----; 解:0()()() d W s W s W s = 5-10已知系统:试设计一个状态观测器,使观测器的极点为-r,-2rr>0;解:因为1001c N cA ⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦满秩,系统能观,可构造观测器; 系统特征多项式为[]21det det 0I A λλλλ-⎡⎤-==⎢⎥⎣⎦,所以有10010,0,10a a L ⎡⎤===⎢⎥⎣⎦ 于是11001100x T ATx T bu x u --⎡⎤⎡⎤=+=+⎢⎥⎢⎥⎣⎦⎣⎦ 引入反馈阵12g G g ⎡⎤=⎢⎥⎣⎦,使得观测器特征多项式:根据期望极点得期望特征式:比较()f λ与()*f λ各项系数得:即223r G r ⎡⎤=⎢⎥⎣⎦,反变换到x 状态下2201321023r r G TG r r ⎡⎤⎡⎤⎡⎤===⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦ 观测器方程为:。
王金城化工出版社第1章习题参考答案:1-1(a )选123123,,,,,y y y v v v 为状态变量,根据牛顿定律,对1M ,有()11112121dv M g K y K y y M dt---= 对2M ,有()()222123232dv M g K y y K y y M dt+---= 对3M ,有()33323433dv M g K y y K y M dt+--= 令312112233415263,,,,,dy dy dyx y x y x y x v x v x v dt dt dt=========,整理得 ()()()122214253641112334233251262322233,,,,,K K K x x x x x x x x xg M M K K K K K x K K xx x g x x x g M M M M M +====-++++=-++=-+()()()1221123222223433300010000001000000010000001100010000K K K M M x x g K K K K M M M K K K M M ⎡⎤⎢⎥⎢⎥⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥+⎢⎥-⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥+⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥+-⎢⎥⎢⎥⎣⎦100000010000001000y x ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦(b )选12,12,,y y v v 为状态变量,根据牛顿定律,对1M ,有()11121111dv M g B v v K y M dt+--= 对2M ,有()22221212dv f M g B v B v v M dt+---= 令1211223142,,,dy dyx y x y x v x v dt dt ======,整理得 11113243134111,,K B Bxx x x x x x x g M M M ===--++ ,112434222B B B f x x x g M M M +=-++所以状态空间描述为1111111122220010000001000011100K B B xx g f M M M B B B M M M ⎡⎤⎡⎤⎢⎥⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥=++⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥+⎣⎦⎢⎥-⎢⎥⎣⎦⎣⎦10000100y x ⎡⎤=⎢⎥⎣⎦1-2(a )取电感电流i 和电容电压u 为状态变量,列回路方程122c rc c c u u R (i )u u R di L u u dt u du C dt R ⎧=+++⎪⎪⎪=+⎨⎪⎪=⎪⎩令12c x i,x u,y u ===()1212121212112121211r R R R R L(R R )L(R R )L(R R )xx u R C R RC(R R )C(R R )-⎡⎤⎡⎤⎢⎥⎢⎥+++⎢⎥⎢⎥=+⎢⎥⎢⎥--⎢⎥⎢⎥+++⎣⎦⎣⎦1222121212r R RR R y x u R R R R R R ⎡⎤=--+⎢⎥+++⎣⎦ (b )选择回路电流a i 和电枢角速度ω为状态变量,有aa a a ae di u R i L K dt ω=++ 力矩平衡方程:a a d J B K i ,dtωω+= 其中a K 为转矩常数 1a a e a a a a adi R K i u dt L L L ω=--+a a K d B i dt J J ωω=-- 令12a x i ,x ,ω==有10a e a aa a R K L L L xx u K B JJ -⎡⎤-⎡⎤⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥-⎣⎦⎢⎥⎣⎦ , []01y x ω==1-3 (1)传递函数为3221375Y(s )U(s )s s s =+++将传递函数中的公因子提出,于是有3123211375Y(s )s U(s )s s s----=+++ 按梅逊公式构建系统的状态变量图能控标准形:0100001057131x x ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦u []200y x =能观标准形:0052107001130x x u -⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦[]001y =x(2)传递函数为:2332132223123Y(s )s s s U(s )s s s s----++==++++ 按梅逊公式构建系统的状态变量图能控标准形:010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦[]210y x =能观标准形:003210010120x x u -⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦[]001y x =(3)传递函数为:3212332123324515471547Y(s )s s s s s s U(s )s s s s s s------+++---==+++++++ 按梅逊公式构建系统的状态变量图状态空间描述为:010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦[]514y x u =---+(4)①12121221212121b s b b s b s Y(s )U(s )s a s a a s a s ----++==++++ 状态空间描述为:1322140101xx u x a a x ⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎣⎦ ,[]21y b b x =②22121201200111s c Z(s )c c Y(s )c s c s c s s c c ---==++++ 状态空间描述为:332144000101x x y c c x x c c ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦ ,301z x c = 两系统串联,得112122332121440001000001000100x x a a x x u x x c c b b x x c c ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦(5)由G(z)有,y(k+3)+4y(k+2)+5y(k+1)+2y(k)=u(k)令12312x (k )y(k )x (k )y(k )x (k )y(k )=⎧⎪=+⎨⎪=+⎩ 1230100100102541x (k )x(k )x (k )u(k )x (k )⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥+=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦[]123100x (k )y(k )x (k )x (k )⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦(6)由G(z)有,y(k+3)+6y(k+2)+11y(k+1)+6y(k)=2u(k+2)+u(k+1)+2u(k)01001001061161x(k )x(k )u(k )⎡⎤⎡⎤⎢⎥⎢⎥+=+⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦[]123212x (k )y(k )x (k )x (k )⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦1-4 (a )化简系统结构图得系统状态空间描述:1234010000010024220025025x x x u x x ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦ []0100y x =(b) 化简系统结构图得系统状态空间描述:1112221323255223735353xx u ///x x u ////--⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦ []110y x = []201y x =1-5 (1) 传递函数为21233212332322461246s s s s s G(s )s s s s s s ------++++==++++++ 能控标准形:010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦[]231y x =能观标准形:006210430121x x u -⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦[]001y x =(2)传递函数为24422431332132s s s G(s )s s s s -----+-+==++++ 能控标准形:01000001000001020301xx u ⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦[]1300y x =-能观标准形:00021100030103000100x x u -⎡⎤⎡⎤⎢⎥⎢⎥-⎢⎥⎢⎥=+⎢⎥⎢⎥-⎢⎥⎢⎥⎣⎦⎣⎦[]0010y x = 1-6(1) 24512122123123(s )(s )G(s )(s )(s )(s )s s s ++-==++++++++状态空间描述:100102010031x x u -⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦,[]12122y x =- (2)223533313313(s )G(s )(s )(s )s s (s )+--==+++++++ 状态空间描述:310003010011x x u -⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦,[]333y x =-- 1-7(1)∵31I A ()()λλλ-=++ 1213,λλ=-=-∴1003A -⎡⎤=⎢⎥-⎣⎦11111111,p Ap ,p λλ⎡⎤=-==⎢⎥⎣⎦,22222131,p Ap ,p λλ⎡⎤=-==⎢⎥-⎣⎦∴1111P ⎡⎤=⎢⎥-⎣⎦1111112P ---⎡⎤=-⎢⎥-⎣⎦ 11112B P B -⎡⎤==⎢⎥-⎣⎦∴11020312x x u ⎡⎤⎢⎥-⎡⎤=+⎢⎥⎢⎥-⎣⎦⎢⎥-⎢⎥⎣⎦(2)1230123I A ,,,λλλλ-==-=-=-∴100020003A -⎡⎤⎢⎥=-⎢⎥⎢⎥-⎣⎦111111111,p Ap ,p λλ⎡⎤⎢⎥=-==-⎢⎥⎢⎥-⎣⎦,2222212212,p Ap ,p λλ⎡⎤⎢⎥⎢⎥=-==-⎢⎥⎢⎥⎢⎥⎣⎦333331333,p Ap ,p λλ⎡⎤⎢⎥=-==-⎢⎥⎢⎥⎣⎦∴1111231132P ⎡⎤⎢⎥⎢⎥=---⎢⎥⎢⎥-⎢⎥⎣⎦137272304027162B P B -⎡⎤⎢⎥⎢⎥==--⎢⎥⎢⎥⎢⎥⎣⎦∴37271002020304000327162x x u ⎡⎤⎢⎥-⎡⎤⎢⎥⎢⎥=-+--⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎢⎥⎣⎦(3)519400433030114003433114j x j x j j ⎡⎤⎢⎥⎡⎤⎢⎥⎢⎥-+⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦+⎢⎥⎢⎥⎣⎦1-8 (1)∵A 为友矩阵123012I A ,,λλλλ-====∴ 110010002A ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 101112124P ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 1111B P B --⎡⎤⎢⎥==-⎢⎥⎢⎥⎣⎦ ∴100101010021x x u -⎡⎤⎡⎤⎢⎥⎢⎥=+-⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦(2)212331031I A ()(),,λλλλλλ-=--====310030001A ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 120112111P ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 11335234B P B --⎡⎤⎢⎥==-⎢⎥⎢⎥-⎣⎦ ∴3101330305200134x x u -⎡⎤⎡⎤⎢⎥⎢⎥=+-⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦1-9(1)110061031002P -⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦111000062300100111000152020233302100313000222AP AP -⎡⎤⎡⎤⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦1106203502BP B -⎡⎤⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦203640C CP ⎡⎤==⎢⎥⎣⎦ 11000621102203333502022xx u ⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦203640y x ⎡⎤=⎢⎥⎣⎦ (2)①1111I A I P AP P P P AP P (I A)P λλλλ-----=-=-=-11I A P I A P P P I A I A λλλλ---=-=-=-∴特征值不变②1111G(s )C(sI A)B CP(sI P AP )P B ----=-=- 111C P(sI P AP )P B ---⎡⎤=-⎣⎦11111C P(sI )P PP APP B C(sI A )B -----⎡⎤=-=-⎣⎦∴传递函数不变1-10证明:11G (s )c(sI A)b -=- 12G (s )c(sI A)b -=- ∵T T TA A ,b c ,c b ===∴12T T T T T T TG (s )b (sI A )c b (sI )A c -⎡⎤=-=-⎣⎦ [11T T T T T Tb (sI A )c b (sI A)c --⎤⎡⎤=-=-⎦⎣⎦11TTc(sI A )b G (s )-⎡⎤=-=⎣⎦ ∵系统为单输入单输出,11T G (s )G (S )= ∴两者传递函数相同。
《现代控制理论》课后习题及答案第一章控制系统的状态空间表达式1-1.试求图1-1系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图图1-1 系统结构方块图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图图1-2 双输入—双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••6543211654321111111126543210000010000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2.有电路如图1-3所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图图1-3 电路图解:由图,令32211,,x u x i x i c===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。