仿真机器人足球
- 格式:ppt
- 大小:1.54 MB
- 文档页数:70
RoboCup机器人足球仿真比赛开发设计* 郭叶军熊蓉吴铁军(浙江大学控制科学与工程学系工业控制技术国家重点实验室杭州 310027)E-mail: yjguo@摘要:机器人世界杯足球锦标赛(The Robot World Cup),简称RoboCup,通过提供一个标准任务来促进分布式人工智能、智能机器人技术及其相关领域的研究与发展。
本文在介绍RoboCup仿真环境的基础上,系统完整地介绍了客户端程序的开发设计流程,阐述了其中涉及到的一些主要问题和算法,最后简要综述目前国际上的典型高层算法结构。
关键词: RoboCup 机器人足球比赛多智能体系统随着计算机技术的发展,分布式人工智能中多智能体系统(MAS:Multi-agent System)的理论及应用研究已经成为人工智能研究的热点。
RoboCup1则是人工智能和机器人技术的一个集中体现,被认为是继深蓝战胜人类国际象棋冠军卡斯帕洛夫后的又一里程碑式挑战,目标是到2050年完全类人的机器人足球队能够战胜当时的人类足球冠军队伍。
RoboCup包括多种比赛方式,主要分为软件仿真比赛和实物系列的机器人足球比赛。
由于软件仿真比赛无需考虑实际的硬件复杂性,避免硬件实现的不足,可以集中于研究多智能体合作与对抗问题,因此,目前参加仿真组比赛的队伍数目最多。
本文的内容涉及RoboCup仿真比赛,系统地介绍了client程序开发设计完整流程,可以作为是开发完整的RoboCup仿真程序的入门指南。
1.RoboCup仿真比赛介绍2 RoboCup仿真比赛提供了一个完全分布式控制、实时异步多智能体的环境,通过这个平台,测试各种理论、算法和Agent体系结构,在实时异步、有噪声的对抗环境下,研究多智能体间的合作和对抗问题。
仿真比赛在一个标准的计算机环境内进行,采用Client/Server 方式,由RoboCup联合会提供Server系统rcsoccersim(版本8之前名为soccerserver),参赛队编写各自的客户端程序,模拟实际足球队员进行比赛。

•引言•FIRA机器人足球仿真系统概述•机器人足球策略技术研究•仿真实验及结果分析•FIRA机器人足球仿真策略优化建议目•结论与展望•参考文献录Fira是一个机器人足球比赛的仿真平台,用于模拟和测试各种足球策略技术。
随着人工智能和机器人技术的快速发展,Fira成为了研究和学习机器人足球策略的重要工具。
背景介绍VS研究目的与意义目的意义研究内容与方法研究内容本报告将介绍Fira机器人足球仿真平台的基本原理和各种策略技术,包括进攻、防守、传球、射门等。
方法本研究将采用理论分析和实验验证相结合的方法,对Fira机器人足球仿真平台中的各种策略技术进行深入研究和测试。
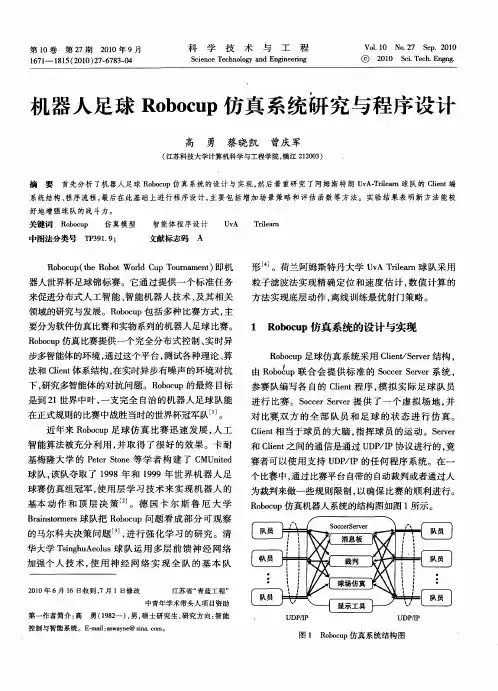
FIRA机器人足球仿真系统简介FIRA机器人足球仿真系统架构2. 机器人模拟1. 比赛场景模拟4. 数据收集与分析3. 比赛规则模拟该部分主要负责模拟机器人足球比赛的规则,包括比赛时间、犯规判FIRA机器人足球仿真关键技术1. 3D图形渲染使用3D图形技术渲染比赛场景和机器人模型,以提供更加真实的视觉体验。
2. 物理引擎使用物理引擎模拟机器人的运动和碰撞,以提供更加真实的比赛效果。
3. 人工智能算法使用人工智能算法模拟机器人的决策和行为,以提供更加智能的机器人行为。
4. 机器学习技术使用机器学习技术自动化调整策略和算法,以提供更加高效的比赛表现。
进攻策略研究030201防守策略研究人盯人防守区域盯人防守全场紧逼通过短传和跑动,将球带向对方球门。
短传控球通过长传将球转移到对方防线的弱点,寻找进攻机会。
长传转移利用盘带技巧,突破对方防线,制造进攻机会。
盘带突破控球策略研究实验设定与条件仿真环境Fira机器人足球仿真环境,包括球场、机器人模型、物理引擎等。
机器人模型基于开源机器人模型进行修改,具有高度逼真度和精细的运动学性能。
传感器与感知采用红外传感器和超声传感器,获取球场信息,实现目标识别和定位。
通信与决策基于Zigbee无线通信技术,实现机器人之间的信息交互和协同决策。
目录第一章、5V5仿真组(Middle Simurosot)介绍Fira Simurosot Game1.1仿真型机器人足球介绍1.2仿真系统基本结构1.3仿真平台及系统特点1.4运行环境和开发工具1.5仿真平台的使用介绍第二章、仿真平台与策略关系及其运动策略开发指南2.1 什么是策略程序2.2 仿真平台与策略的运行关系2.3 仿真平台场地数据2.4 接口代码解析2.5 程序开发流程2.6 动作函数介绍2.7 在策略中调用动作的基本方法2.8 简单策略开发2.9 各种定位球第三章、比赛规则3.1 名词解释3.2 比赛规则3.3 犯规与处罚3.4 裁判3.5 环境3.6 其他第一章5V5仿真组(Middle League Simurosot)介绍FIRA SimuroSot Game1.1仿真型机器人足球介绍仿真型机器人足球(SimuroSot)SimuroSot 是一种仿真的软件系统,在该项比赛中,参赛的每个机器人不是实际的机器人,而是用计算机模拟的虚拟机器人,它主要研究比赛策略,以软件为主,忽略机器人的硬件相关的需求。
比赛中,我们仅关注的好似软件部分,主要研究用软件来实现既定的策略,完成给定的程序逻辑,主体的程序对语言要求很低,主要是要求拥有清晰的逻辑和编程思想。
换言之,SimuroSot 类型的比赛是智力与智力的碰撞。
1.2仿真系统基本结构仿真系统是有FIRA 提供的仿真程序,这个程序通过DLL(动态连接库)接收双方策略,决策系统由各队提供自己的DLL程序。
场上的数据由仿真程序计算给出,DLL接收处理并将要发给机器人的命令传给仿真程序。
1.3仿真平台及系统特点开发者:澳大利亚的Dr.Jun Jo 领导的Griffith大学信息技术学院RSS开发小组系统特点:1.机器人模型:Y ujin机器人的物理模型2.模拟精确:碰撞检测完全,碰撞处理精确(采用商业游戏引擎公司Havok的碰撞处理引擎)3.界面:3维(采用Direct设计界面,3D Max模型)1.4运行环境和开发工具仿真系统:3D Robot Soccer Simulator 1.5a编程语言:C/C++开发环境:MS Visual C++ 6.0 / MS VS2003模板:使用仿真系统提供的源程序模板程序模板说明:程序使用动态连接库(DLL)方式硬件需求:Pentiun III 600 MHz或其以上级别的显示卡256M系统内存具有32M以上显存的TNT2或其以上级别的显示卡能够支持800×600以上分辨率的显示器软件需求:Windows98或以上版本的操作系统DirectX 8.0或以上的版本1.5仿真平台的使用介绍1.5.1运行程序的方法1.先将自己编写好的代码编译成dll文件,黄队程序拷到C:\strategy\yellow,蓝队程序拷到C:\strategy\blue。
第一章机器人足球简介1.1Agent技术概论1.1.1智能AgentAgent的概念最早可以追溯到1977年由Hewitt提出的演员模型,在该模型中给出了一些“演员”—一组具有知我包含、相互作用和并行执行的对象。
以后的研究中又把Agent 看成一个具有特别技能的个体。
后来又提出了软件agent的概念,认为软件agent是具有自主性和协作性的实体,它能够帮助用户完成一定的任务。
还有些研究者认为Agent是驻留在某一环境下能够持续、自主地发挥作用,满足任务/目标驱动性、社会性、主动性等特征的计算主体。
由上面可见,agent的定义和表现格不相同。
实际上,要想在对形成Agent一个比较统一的定义还是不太容易的。
所以更多的研究者把关注放在对Agent的特性的研究上面。
现在对Agent的特性的研究中,最为经典和广为人接受的是Wooldridge等人提出的有关Agent 的“强定义”和“弱定义”,认为一个Agent的最基本的特性应该包含反应性、自主性/自制性、面向目标性和社会性,然后根据其应用情况可以拥有其他特性。
Agent可以拥有的其他特性包括:移动性、自适应性、反应性、理性、持续性或时间连续性、自启动和自利等特性。
还有一些人从Agent的精神状态出发,对Agent的特性进行了更深入的研究。
从建造Agent的角度出发,单个Agent的结构通常分为思考型Agent、反应型Agent、混合型Agent。
下面分别介绍一下这些类型的Agent。
⏹思考型Agent(deliberate Agent)建造Agent的经典方法是将其看作是一种特殊的知识系统,即通过符号人工智能的方法来实现Agent的表示和推理,这就是所谓的思考型Agent。
思考型Agent的最大特点就是将Agent看作是一种意识系统。
人们设计的基于Agent 系统的目的之一是把它们作为人类个体或社会行为的智能代理,那么Agent就应该能模拟或表现出被代理者具有的所谓意识态度,如信念、愿望、意图、目标、承诺、责任等。

仿真机器人足球队的体系结构球员的高层决策体系报告人:黄展翔Summary☐Goal : passing you useful information to help you build your own simulation soccer team☐Some essential concepts and ideas should bear in mind , which will be helpful while you design your own team☐Fast start-up steps and samples☐The running environmentRoboCup团队合作挑战☐多智能体对抗比赛中的预防性规划☐规划分解和合并☐团队规划的执行评价各种体系结构和球队的评价模式☐基本性能☐健壮性☐一般性能☐实时运作☐通用性☐学习能力Refer RoboCup合成智能体挑战97我们要做些什么?server 更新程序更新场地模型球员控制程序场地模型场地模型信息server 更新程序快速起步构建自己的球队☐了解球队构成☐利用已有底层☐添加自己的高层决策☐注意运行环境仿真球队构成:☐整个球队共11名队员和一个教练☐教练、普通球员、守门员的区别信息感知行为能力☐我们要设计一个全能的队员,它能胜任各种不同的角色(守门员、后卫、中场、前锋等)利用已有的底层代码☐记忆模型世界模型Memory预测模型Prediction☐基本动作踢球kick_ball(direction, speed)传球pass_ball(teammate)射门shoot()带球dribble(position)拦截球intercept()跑位go_to_position(position)铲球tackle()扑球(守门员)catch_ball()添加自己的高层决策球员与server之间的同步问题☐周期(cycle)的概念☐server更新☐决策与server同步Agent的可分为两类:☐反应式agent (stimulus-response agent)☐慎思式agent (deliberative agent)反应式agent决策树式的决策系统高层决策树示例WrightEagle框架介绍:☐内部记忆体Memory包含了世界模型AbsoluteBallPosition(time)和预测模型FastestTeammatToBall(time)☐行为产生器Command产生带参数的动作kick(power,angle)dash(power)☐决策模块则包含在behave()函数中重要的决策函数behave()☐Agent类class agent{Memory mem;//内部记忆体Command cmd ;//行为产生器int behave();//决策模块};☐每个周期执行一次server →client.behave() →server information actionBehave()示例流程:Switch (play_type){case goalie:switch (play_mode){case play_on ://goalie decisioncase set_play://goalie decision}case normal_player:switch (play_mode){case play_on ://player decisioncase set_play://player decision}}普通球员决策树示例简单的agent程序示例my_home_position=vector(ballX*x_factor+basic_x ,ballY*y_factor+basic_y); behave(){If(i_am_goalie){if(ball_catchable)catch_ball();elsego_to_position(my_home_position);}else{//normal_playerif(ball_kickable)shoot();else if(i_am_the_closest_teammate_to_ball) intercept();elsego_to_position(my_home_position);}}竞争式的决策系统Tsinghuaeolus框架介绍:Behave(){//行为生成和评价motion.Defense();motion.SmartInterception();motion.Position();motion.Dribble();motion.Shoot();motion.Pass();motion. Communication();//行为仲裁mediator.mediation();}慎思式agent☐较强的推理能力☐学习适应能力☐显式长期规划能力守门员的设计问题:☐站位于跑位的特殊性☐扑球动作模型☐发任意球时候的move考虑教练的设计:☐通信限制☐更换球员类型☐给球员提出建议运行环境:☐编译器g++ version 2.94☐Linuxvi file_namemake dependmake☐连接serverrcssserverstart host_name team_name联系方式:☐邮件列表(mailing list)/联系交往☐个人信箱huangzx@。
BJUT仿真2D机器人足球队描述文档队员:冯云贺,李战,唐震指导老师:左国玉北京工业大学电控学院zuoguoyu@一、队伍简介自2008年起,北京工业大学仿真2D机器人足球BJUT队积极参加Robocup中国公开赛,并取得了一定的成绩。
从去年比赛开始,我们所用的底层由UVA换成了Agent2D,由于两个底层差别较大,移植的难度太高,所以我们在继承了前辈们成果思想的基础上加以自己的创新,经过一年多的分析和研究,改善了新的底层,强化了高层策略。
以下是我们对新底层的理解及对底层所作的工作。
二、底层代码结构介绍- librcsc v4.1.0 Agent2D及相关工具的底层库- soccerwindow2 RCSS浏览程序,既可作为monitor,也可作为logplayer-fedit2球队阵型编辑器- agent2d v3.1.0官方给出的最原始的底层,下载地址为http://fr.sourceforge.jp/projects/rctools/downloads/51943/agent2d-3.1.0.tar.gz/ 2.1librcsclibrcsc作为一个球队及相关工具的底层库,包含了几何运算库、网络连接库、球员的基本动作库、世界模型库、教练球员相关的库以及日志分析等库。
2.2soccerwindow使用soccerwindow调试工具,可以在linux平台下在线调试球队。
以下图中的黄方9号球员为例,数字9是其号码,数字7911代笔其当前体力,半圆弧线代表其当前脖子方向(视野)。
可以通过启动Debug菜单可以查看任意球员任意仿真周期的动作和状态。
通过拖动工具栏的进度条,可以回放比赛。
右下方显示当前鼠标位置的坐标。
还可以在比赛中任意摆放球员的位置,观察效果。
此外,调试工具还可以打开任意一场比赛的.rcg文件,进行数据与策略分析。
如下图所示:2.3feditfedit是一个在Windows下运行的阵型编辑器,可以直观的方便的设置自己的阵型,避免了在程序中写大量代码的麻烦,同时也不用一遍遍的测试坐标。
198创新论坛摘要:本项目主要研究FIRA 5vs5大比赛场地环境下足球机器人的进攻策略的设计。
策略首先对射门[1]函数按照球所处的半场进行制约,避免乌龙球的出现。
其次,策略针对了传球问题中球易被被拦截的情况,提出了旋转传球的改进方法,通过该方法,能够大大缩短传球球员位移到最佳击球点的时间,提高了传球的稳定性和协助进攻的成功率。
关键词:射门;旋转传球;协助1◆◆射门策略设计1.1 球在对方半场当球在我方球员与对方守门员之间时,己方球员离球直线距离最近,此时可以调整射门角度,猛烈地撞击球,以增加对方守门员的防守难度,提高进球率。
此时最佳的判断情况为对方球员大部分在我方半区,而我方处于进攻状态时,我方有充足时间进行角度选择。
1.2 球在己方半场当球处于己方射门球员与己方守门员之间时,为避免乌龙球,此时不应使用调整角度,直线踢球的方式,而是采用一种弧形踢球法,射门球员在到达目标位置时需旋转90度,将球安全的运到后场。
此类情况出现在球进入我方半区,敌方射门球被守门员防守或者中途被其他球员截获,待球员将球运入后场后,采用防守击球函数,将球运入敌方半场,然后组织进攻。
2◆◆多人协助射门策略我们设计了协助踢球策略,即将球传给另一名球员,由该球员完成射门任务。
实验中,简单的协助踢球策略所花时间略长,这主要是因为,击球球员需要调整到球后的位置,然后撞击球,在调整位置的过程中,花费了大量时间。
对此,本文提出了旋转踢球的方法,将传统踢法进行改进,并取得了一定效果。
下面将说明旋转传球和接球的思想:2.1 旋转传球法下面我们将机器人的角动量表示为 ,机器人小车相对于其质心的位矢表示为 ,所以有其中 为机器人小车的驱动力对小车质心的力矩。
由于惯性作用,机器人小车原来具有的较高的线速度仍可使它滑行到球的坐标点。
经过这一段滑行时间的调整,小车到达球坐标点时便近似为让小车绕质心的定轴旋转,即有:根据计算,机器人小车可以获得很高的角速度,当机器人小车的一侧触碰到球,便给以冲量,达到传球的目的。
FIRA SimuroSot 5vs5 (仿真)比赛规则1.介绍以下规则用于FIRA 中型组仿真比赛2. 仿真平台1. 计算机配置2. 场地尺寸赛场为黑色(不反光的)木质长方形场地,其尺寸是220cm×180cm ,带有5cm 高,2.5cm 厚的围墙。
围墙的侧面为白色,围墙顶部为黑色。
在场地的四角固定四个7cm×7cm 的等腰三角形以避免球进入角落。
3. 场上标记比赛场地标记如图1 所示。
中圈半径是25cm 。
作为罚球区的一部分的圆弧沿球门线长25cm ,垂直于球门线5cm。
主要直线/圆弧(中线、门区边界线和中圈)均为白色,3mm 宽。
争球时机器人的站位标记为灰色。
4. 球门,门线与门区球门宽40cm.门线是恰好位于球门前长40cm 的直线。
门区(图1 中的区域A)包括位于球门前尺寸为50cm×15cm 的长方形区域。
5. 罚球区罚球区(图1 中的区域A,B)包括球门前尺寸为80cm×35cm 的长方形区域及其附属弧形区域.3. 比赛过程1. 时间比赛分两个半场,每半场5 分钟,中场休息10 分钟。
在换人、暂停或其它必要情况下,官方计时员将暂停计时。
如果一支球队在中场休息时间没有准备好,不能继续开始下半场比赛,休息时间可以延长5 分钟。
若在延时之后球队仍未准备好继续比赛,则将取消其比赛资格。
2. 暂停操作者可向裁判要求暂停。
在一场比赛中每队有权暂停2 次,每次将持续2 分钟。
3. 记时仿真平台上的记时器不能代替官方记时器,比赛中应当使用专门的记时器. 4. 比赛中断只有在下列情况下比赛中断并由一个操作者重新布置机器人:1.破门得分或出现犯规2.裁判员判点球,争球,球门球,任意球3.仿真平台出现问题4.有不可预知的情况发生,如计算机自动重启,突然停电5.运动员如果一个机器人位于己方的球门区内,应当被视为守门员。
(一个机器人有多于50%在门区内就认为该机器人在门区内,这一点由裁判员来判断。
Robocup2D入门介绍发布时间:2010-07-22 浏览次数:一机器人足球简介机器人足球赛,顾名思义,就是制造和训练机器人进行足球比赛。
通过这种方式来提高人工智能领域、机器人领域的研究水平。
从1997年起,每年举办一界机器人世界杯足球赛。
机器人足球赛涉及人工智能、机器人学、通讯、传感、精密机械和仿生材料等诸多领域的前沿研究和技术集成,实际上是高技术的对抗赛。
国际上最具影响的FIRA和RoboCup两大世界杯机器人足球赛,有严格的比赛规则,融趣味性、观赏性、科普性为一体。
机器人足球赛从一个侧面反映了一个国家信息与自动化领域基础研究和高技术发展的水平。
RoboCup的最终目标是:到21世纪中叶,一支完全自治的人形机器人足球队应该能在遵循国际足联正式规则的比赛中,战胜最近的人类世界杯冠军队。
目前,有关机器人足球比赛的国际组织有两个:FIRA组织和Robocup联合会。
FIRA(Federation of International Robot-Soccer association),它是由韩国人创立的组织,从1997年开始,FIRA每年都举行一次机器人足球世界杯决赛(FIRA Robot_Soccer World Cup),简称FIRA RWC。
FIRA的比赛项目主要有:超微机器人足球赛、单微机器人足球赛、微型机器人足球赛、小型机器人足球赛、自主式机器人足球赛、拟人式机器人足球赛、仿真机器人。
RoboCup(Robot World Cup),即机器人世界杯足球锦标赛。
它是国际上一项为提高相关领域的教育和研究水平而举行的大型比赛和学术活动,通过提供一个标准任务来促进分布式人工智能、智能机器人技术、及其相关领域的研究训练和制造机器人进行足球赛,是当前人工智能和机器人领域的研究热点之一。
机器人足球比赛的设想首先是由加拿大不列颠哥伦比亚大学的教授AlanMackworth 在1992 年的论文《On Seeing Robots》中提出的。