示教器与控制器系统构架
- 格式:ppt
- 大小:1021.50 KB
- 文档页数:6
工业机器人控制系统组成及典型结构一、工业机器人控制系统所要达到的功能机器人控制系统是机器人的重要组成部分,用于对操作机的控制,以完成特定的工作任务,其基本功能如下:1、记忆功能:存储作业顺序、运动路径、运动方式、运动速度和与生产工艺有关的信息。
2、示教功能:离线编程,在线示教,间接示教。
在线示教包括示教盒和导引示教两种。
3、与外围设备联系功能:输入和输出接口、通信接口、网络接口、同步接口。
4、坐标设置功能:有关节、绝对、工具、用户自定义四种坐标系。
5、人机接口:示教盒、操作面板、显示屏。
6、传感器接口:位置检测、视觉、触觉、力觉等。
7、位置伺服功能:机器人多轴联动、运动控制、速度和加速度控制、动态补偿等。
8、故障诊断安全保护功能:运行时系统状态监视、故障状态下的安全保护和故障自诊断。
二、工业机器人控制系统的组成1、控制计算机:控制系统的调度指挥机构。
一般为微型机、微处理器有32 位、64 位等如奔腾系列CPU 以及其他类型CPU 。
2、示教盒:示教机器人的工作轨迹和参数设定,以及所有人机交互操作,拥有自己独立的CPU 以及存储单元,与主计算机之间以串行通信方式实现信息交互。
3、操作面板:由各种操作按键、状态指示灯构成,只完成基本功能操作。
4、硬盘和软盘存储存:储机器人工作程序的外围存储器。
5、数字和模拟量输入输出:各种状态和控制命令的输入或输出。
6、打印机接口:记录需要输出的各种信息。
7、传感器接口:用于信息的自动检测,实现机器人柔顺控制,一般为力觉、触觉和视觉传感器。
8、轴控制器:完成机器人各关节位置、速度和加速度控制。
9、辅助设备控制:用于和机器人配合的辅助设备控制,如手爪变位器等。
10 、通信接口:实现机器人和其他设备的信息交换,一般有串行接口、并行接口等。
11 、网络接口1) Ethernet 接口:可通过以太网实现数台或单台机器人的直接PC 通信,数据传输速率高达10Mbit/s ,可直接在PC 上用windows 库函数进行应用程序编程之后,支持TCP/IP 通信协议,通过Ethernet 接口将数据及程序装入各个机器人控制器中。
工业机器人的系统组成及各部分作用一、引言工业机器人是一种自动化操作装置,主要用于工业生产中重复性高、作业环境危险的工作。
它的出现不仅提高了生产效率,而且还减少了人力成本和劳动强度。
要了解工业机器人的系统组成及各部分作用,我们需要从整体系统结构、各部分功能和作用等方面进行深入分析。
二、系统组成1. 机械结构机械结构是工业机器人的主体框架,它由基座、臂部、手部等部分组成,用于支撑和连接其他各部分。
其中,基座是机器人的底部支撑,臂部是机器人的动作执行部分,手部是机器人的操作器具,通过各部件的灵活组合,可以完成各种工业操作任务。
2. 控制系统控制系统是工业机器人的大脑,包括传感器、控制器、执行器等组成部分。
传感器用于获取外部环境的信息,控制器用于对机器人的动作进行指令和控制,执行器则是根据控制器的指令完成各项操作任务。
三、各部分作用1. 机械结构机械结构的作用是支撑和连接机器人的各部分,使之能够进行灵活的运动和操作。
通过合理的结构设计,可以实现机器人的高效作业和灵活操作,提高生产效率。
2. 控制系统控制系统的作用是实现机器人的自动化操作,传感器用于获取外部环境信息,控制器通过对信息的处理和分析,指挥执行器完成任务。
这种自动化操作不仅可以提高生产效率,还可以降低人力成本和减少劳动强度,同时也能保证生产过程中的安全性。
四、个人观点和理解通过对工业机器人的系统组成及各部分作用进行全面分析,我们可以深刻理解工业机器人的工作原理和作用。
我认为,工业机器人的出现标志着人类生产方式的进步和自动化水平的提高,它不仅可以大幅度提高生产效率,还可以降低生产成本,实现可持续发展和智能制造。
五、总结与展望通过本文的探讨,我们对工业机器人的系统组成及各部分作用有了更深入的了解。
在未来,随着科技的发展和人工智能技术的应用,工业机器人的性能和作用将会不断提升,我们期待工业机器人能够在更多领域发挥作用,为人类生活和生产带来更多便利。
工业机器人的系统组成及各部分作用是一个复杂而又精密的系统工程,它的实现对于提高整个生产效率和改善生产环境起着至关重要的作用。
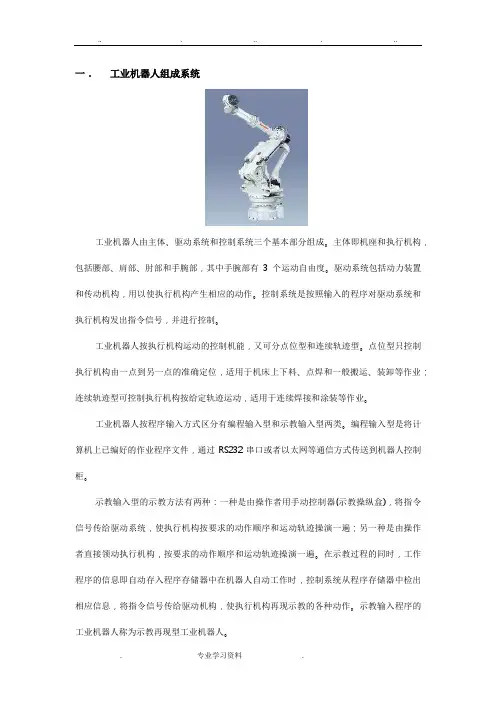
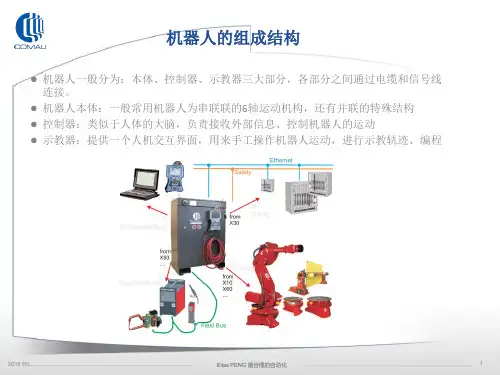
一.工业机器人组成系统工业机器人由主体、驱动系统和控制系统三个基本部分组成。
主体即机座和执行机构,包括腰部、肩部、肘部和手腕部,其中手腕部有3个运动自由度。
驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作。
控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
工业机器人按执行机构运动的控制机能,又可分点位型和连续轨迹型。
点位型只控制执行机构由一点到另一点的准确定位,适用于机床上下料、点焊和一般搬运、装卸等作业;连续轨迹型可控制执行机构按给定轨迹运动,适用于连续焊接和涂装等作业。
工业机器人按程序输入方式区分有编程输入型和示教输入型两类。
编程输入型是将计算机上已编好的作业程序文件,通过RS232串口或者以太网等通信方式传送到机器人控制柜。
示教输入型的示教方法有两种:一种是由操作者用手动控制器(示教操纵盒),将指令信号传给驱动系统,使执行机构按要求的动作顺序和运动轨迹操演一遍;另一种是由操作者直接领动执行机构,按要求的动作顺序和运动轨迹操演一遍。
在示教过程的同时,工作程序的信息即自动存入程序存储器中在机器人自动工作时,控制系统从程序存储器中检出相应信息,将指令信号传给驱动机构,使执行机构再现示教的各种动作。
示教输入程序的工业机器人称为示教再现型工业机器人。
几个问题:(1)巨轮机器人JLRB20KG机器人是点位型还是连续轨迹型?(2)能不能编写一个简单程序,使机器人能够的末端能够走一个圆?(3)能不能控制机器人中每一个电机的输出功率或扭矩?(4)机器人每一个关节从驱动电机到执行机构的传递效率有没有?二.工业机器人的主体机器人本体由机座、腰部、大臂、小臂、手腕、末端执行器和驱动装置组成。
共有六个自由度,依次为腰部回转、大臂俯仰、小臂俯仰、手腕回转、手腕俯仰、手腕侧摆。
机器人采用电机驱动,电机分为步进电机或直流伺服电机。
直流伺服电机能构成闭环控制、精度高、额定转速高、但价格较高,而步进电机驱动具有成本低、控制系统简单。
一种新型轻型机械臂示教软件架构设计作者:王祺王堃张璇琛来源:《软件导刊》2018年第02期摘要:传统轻型六轴机械臂控制软件构架一般包括控制器、示教器、canopen通讯等部分。
传统控制器是一个程序,机械臂动作參数设定时,一个动作信号需要一组控制器參数,大量的数据收发常常引发主线程与其它线程争夺资源而出现死锁,导致主线程不能继续往下执行,出现卡死。
对此,使用Qt软件及C++语言,开发了一款新型六轴机械臂控制软件。
采用TCP/IP通讯实现程序间通讯,多线程提高单个程序效率,以QTcpSocket类进行网络编程。
通过控制轻型六轴机械臂运动实验,证明此控制软件有效、稳定,能解决界面卡死问题,具有良好的可扩展性与可移植性,界面友好,运行流畅。
关键词:TCP/IP通讯;图形界面卡死;QTcpSocketDOIDOI:10.11907/rjdk.172360中图分类号:TP319文献标识码:A 文章编号:1672-7800(2018)002-0124-040 引言图1是六轴轻型机械臂控制系统。
控制软件安装在控制器里,示教器是控制器外的触屏。
控制器和示教器连在一起是低配的平板电脑,运算和储存要求不高。
PCAN又叫做PCAN-USB,是一个CAN转USB接口,通过它可以将CAN网络上的报文通过USB接口传输到PC 上,通过相关软件查看CAN报文。
PCAN的另一端连接控制器CAN卡,CAN卡与六轴机械臂相连。
使用Qt编写程序,语言为C++。
1 界面卡死原因“界面卡死”是计算机系统由于过量的进程资源消耗,使图形界面进程受到影响的现象。
控制程序较为复杂的指令有发送和接收报文、进行运动轨迹规划等。
用户通过示教器的图形界面发出指令,在进行稍微复杂的处理时就会有延迟,使得界面(GUI)卡死。
对此进行改进,将控制器的程序拆分为两个,如图2所示。
一个程序是用户界面程序(GUI),称为RH-LBR,负责收集用户指令,另一个程序Communication_APP专门负责收集下位机发来的报文,以及通过GUI指令向下位机发送指令。
工业机器人工作原理及其基本构成工业机器人工作原理现在广泛应用的焊接机器人都属于第一代工业机器人,它的基本工作原理是示教再现。
示教也称导引,即由用户导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数\工艺参数等,并自动生成一个连续执行全部操作的程序。
完成示教后,只需给机器人一个启动命令,机器人将精确地按示教动作,一步步完成全部操作。
这就是示教与再现。
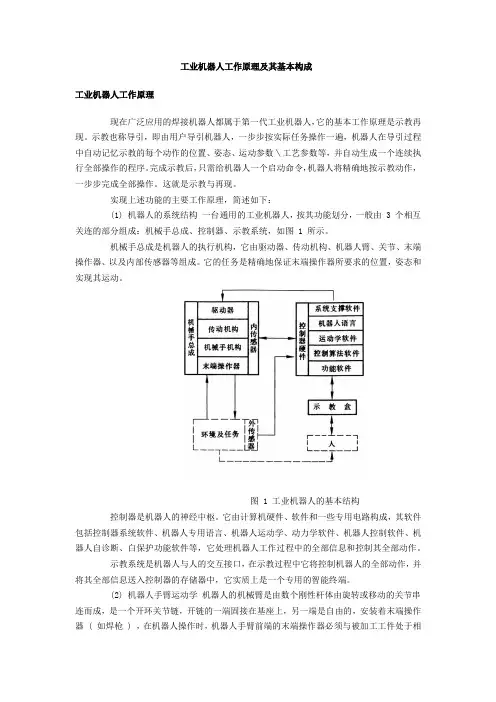
实现上述功能的主要工作原理,简述如下:(1) 机器人的系统结构一台通用的工业机器人,按其功能划分,一般由 3 个相互关连的部分组成:机械手总成、控制器、示教系统,如图 1 所示。
机械手总成是机器人的执行机构,它由驱动器、传动机构、机器人臂、关节、末端操作器、以及内部传感器等组成。
它的任务是精确地保证末端操作器所要求的位置,姿态和实现其运动。
图 1 工业机器人的基本结构控制器是机器人的神经中枢。
它由计算机硬件、软件和一些专用电路构成,其软件包括控制器系统软件、机器人专用语言、机器人运动学、动力学软件、机器人控制软件、机器人自诊断、白保护功能软件等,它处理机器人工作过程中的全部信息和控制其全部动作。
示教系统是机器人与人的交互接口,在示教过程中它将控制机器人的全部动作,并将其全部信息送入控制器的存储器中,它实质上是一个专用的智能终端。
(2) 机器人手臂运动学机器人的机械臂是由数个刚性杆体由旋转或移动的关节串连而成,是一个开环关节链,开链的一端固接在基座上,另一端是自由的,安装着末端操作器 ( 如焊枪 ) ,在机器人操作时,机器人手臂前端的末端操作器必须与被加工工件处于相适应的位置和姿态,而这些位置和姿态是由若干个臂关节的运动所合成的。
因此,机器人运动控制中,必须要知道机械臂各关节变量空间和末端操作器的位置和姿态之间的关系,这就是机器人运动学模型。
一台机器人机械臂几何结构确定后,其运动学模型即可确定,这是机器人运动控制的基础。
工业机器人控制系统组成及典型结构一、工业机器人控制系统所要达到的功能机器人控制系统是机器人的重要组成部分,用于对操作机的控制,以完成特定的工作任务,其基本功能如下:1、记忆功能:存储作业顺序、运动路径、运动方式、运动速度和与生产工艺有关的信息。
2、示教功能:离线编程,在线示教,间接示教。
在线示教包括示教盒和导引示教两种。
3、与外围设备联系功能:输入和输出接口、通信接口、网络接口、同步接口。
4、坐标设置功能:有关节、绝对、工具、用户自定义四种坐标系。
5、人机接口:示教盒、操作面板、显示屏。
6、传感器接口:位置检测、视觉、触觉、力觉等。
7、位置伺服功能:机器人多轴联动、运动控制、速度和加速度控制、动态补偿等。
8、故障诊断安全保护功能:运行时系统状态监视、故障状态下的安全保护和故障自诊断。
二、工业机器人控制系统的组成1、控制计算机:控制系统的调度指挥机构。
一般为微型机、微处理器有32位、64位等如奔腾系列CPU以及其他类型CPU。
2、示教盒:示教机器人的工作轨迹和参数设定,以及所有人机交互操作,拥有自己独立的CPU以及存储单元,与主计算机之间以串行通信方式实现信息交互。
3、操作面板:由各种操作按键、状态指示灯构成,只完成基本功能操作。
4、硬盘和软盘存储存:储机器人工作程序的外围存储器。
5、数字和模拟量输入输出:各种状态和控制命令的输入或输出。
6、打印机接口:记录需要输出的各种信息。
7、传感器接口:用于信息的自动检测,实现机器人柔顺控制,一般为力觉、触觉和视觉传感器。
8、轴控制器:完成机器人各关节位置、速度和加速度控制。
9、辅助设备控制:用于和机器人配合的辅助设备控制,如手爪变位器等。
10、通信接口:实现机器人和其他设备的信息交换,一般有串行接口、并行接口等。
11、网络接口1)Ethernet接口:可通过以太网实现数台或单台机器人的直接PC通信,数据传输速率高达10Mbit/s,可直接在PC上用windows库函数进行应用程序编程之后,支持TCP/IP通信协议,通过Ethernet接口将数据及程序装入各个机器人控制器中。

工业机器人系统的概貌,简介工业机器人的分类与控制系统
在我们心中的机器人都是被人格化后的机器人形象。
那么,把机器人尤其是工业机器人形象解构以后,他又会是什么样子呢?
平时不论是新闻上看到的工业机器人、双足机器人、四足机器人还是动漫作品里的机器人形象大部分是机器人本体,而机器人控制系统则是幕后功臣,类似于人的大脑,这个控制系统往往安装在机器人本体的内部或是有一个单独的控制单元。
下图描绘了一个工业机器人系统的概貌,一个工业机器人系统包括了机器人本体、伺服电机(或者是直流电机)、减速机、驱动器、控制器、示教器、还有一些外围的设备,比如摄像头、六维力传感器、IO模块、焊接部件等等。
对于一个工业机器人系统而言,我们对上面的图进行简化,将刚才的工业机器人系统简化,抽取出工业机器人系统中必不可少的部分:控制系统、机器人本体和示教器。
而控制系统从常规结构上可以分为两部分:执行机构和控制系统。
执行机构包括机器人本体、伺服电机和减速装置;控制系统则分为控制器、伺服驱动器、示教器和拓展模块,其中拓展模块包括力觉模块、视觉模块、抓取模块等,也就是说我们我们所看到的机器人能完成的每个动作,都需要添加拓展模块。
举个例子,假如英雄联盟中的蒸汽机器人布里茨缺少了抓取模块,就不能完成机械飞爪技能中的抓取敌人功能啦。
现在进入重点啦,下面来具体分析一下控制系统中每个部分的功能和用途吧。
对于工业机器人系统而言,示教器是用于与用户交互的设备,它能够处理和记忆用户赋予工业机器人的任务指令。
一般情况下,它分为三种模式:示教模式、在线模式和远程模式。
示教模式用于示教机器人的动作序列,最终以作业的形式保存在示教盒中;。