发动机传动电机的转速控制BP+PI
- 格式:docx
- 大小:649.44 KB
- 文档页数:20
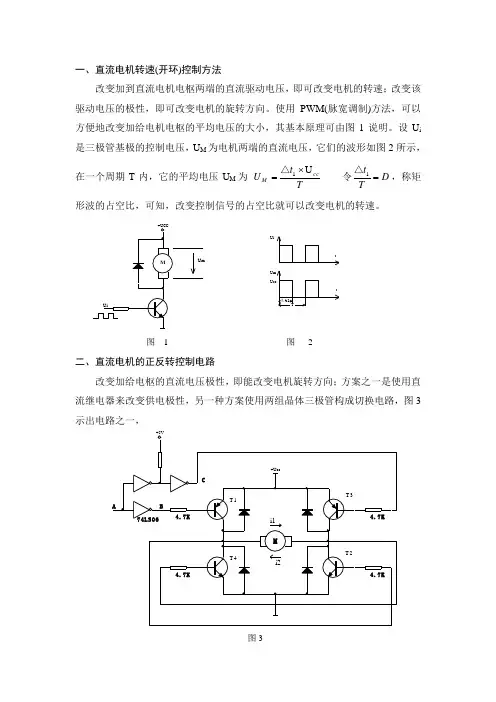
一、直流电机转速(开环)控制方法改变加到直流电机电枢两端的直流驱动电压,即可改变电机的转速;改变该驱动电压的极性,即可改变电机的旋转方向。
使用PWM(脉宽调制)方法,可以方便地改变加给电机电枢的平均电压的大小,其基本原理可由图1说明。
设U i 是三极管基极的控制电压,U M 为电机两端的直流电压,它们的波形如图2所示,在一个周期T 内,它的平均电压U M 为 Tt U ccM U 1⨯=△ 令DTt =1△,称矩形波的占空比,可知,改变控制信号的占空比就可以改变电机的转速。
图 1 图 2二、直流电机的正反转控制电路改变加给电枢的直流电压极性,即能改变电机旋转方向;方案之一是使用直流继电器来改变供电极性,另一种方案使用两组晶体三极管构成切换电路,图3示出电路之一,图3UitUm UccTtΔt1其工作原理简述如下:当A=1(高电平):则B=0 →T1导通→T2导通;C=1 →T3 截上→T4截上;于是电流i1流经由机M的路径为:Ucc→T1→M→T2→地,电机正转若A=0(低电平):则B=1 →T1截上→T2截上;C=0 →T3导通→T4导通;于是电流i2的流径电机M的路径为:Ucc→T3→M→T4→地,电机反转。
图4是正反转控制的另一种电路,图4其工作原理简述如下:当A=1:则B=0 →T1截上→T2导通C=1 →T4导通→T3截上于是电流i1流径电机M的路径为:Vcc→T2→M→D2→T4→地,电机正转。
当A=0:则B=1 →T1导通→T2截上C=0 →T4截上→T3导通于是电流i2流径电机M的路径为:Vcc→T3→M→D1→T1→地,电机反转。
以上两个电路,以图4为例,在T1、T4的控制输入端B、C处分别加入一个与门(或者与非门)引入PWM 信号,则可以把正反转控制和PWM 调整控制结合起来。
三、整形电路为使不规范脉冲波形的前后沿陡峭,并使其幅值规范为某一定值,须使用整形电路。
通常,使用滞回比较器构成整形电路,它具有抗干扰能力强等特点,在一些简单应用中,也可以使用简单的单阈值比较器。
电机转速pi调节公式电机转速PI调节公式一、引言电机转速调节是工业控制领域中常见且重要的问题之一。
在许多应用中,精确控制电机的转速对于保证系统的稳定性和性能至关重要。
本文将介绍一种常用的电机转速PI调节公式,旨在提供一种有效的方法来实现电机转速的精确控制。
二、电机转速PI调节公式电机转速PI调节公式通常由两个部分组成:比例控制和积分控制。
比例控制用于根据转速误差的大小调整输出信号的幅度,而积分控制则用于根据转速误差的持续时间调整输出信号的持续时间。
1. 比例控制比例控制的目标是根据转速误差的大小来调整输出信号的幅度,以使转速误差逐渐减小。
比例控制公式如下:输出信号 = Kp × 转速误差其中,Kp为比例系数,用于确定输出信号的幅度大小。
较大的Kp 值将导致较大的输出信号,从而更快地减小转速误差,但也可能引发系统的不稳定性。
2. 积分控制积分控制的目标是根据转速误差的持续时间来调整输出信号的持续时间,以使转速误差逐渐趋于零。
积分控制公式如下:输出信号= Ki × ∫转速误差 dt其中,Ki为积分系数,用于确定输出信号的持续时间。
较大的Ki 值将导致较长的输出信号持续时间,从而更快地减小转速误差,但也可能引发系统的震荡和超调。
3. PI调节公式将比例控制和积分控制结合起来,即可得到电机转速PI调节公式:输出信号 = Kp × 转速误差+ Ki × ∫转速误差 dt通过调整比例系数Kp和积分系数Ki的数值,可以实现对电机转速的精确控制。
较小的Kp和Ki值将导致较慢的响应速度,但可以提高系统的稳定性;较大的Kp和Ki值则可以实现更快的响应速度,但可能导致系统的不稳定性和震荡。
三、结论电机转速PI调节公式是一种常用且有效的方法,可用于实现电机转速的精确控制。
通过调整比例系数Kp和积分系数Ki的数值,可以根据实际需求来平衡系统的响应速度和稳定性。
在实际应用中,需要根据具体情况进行参数调整和实时监控,以保证系统的稳定性和性能。
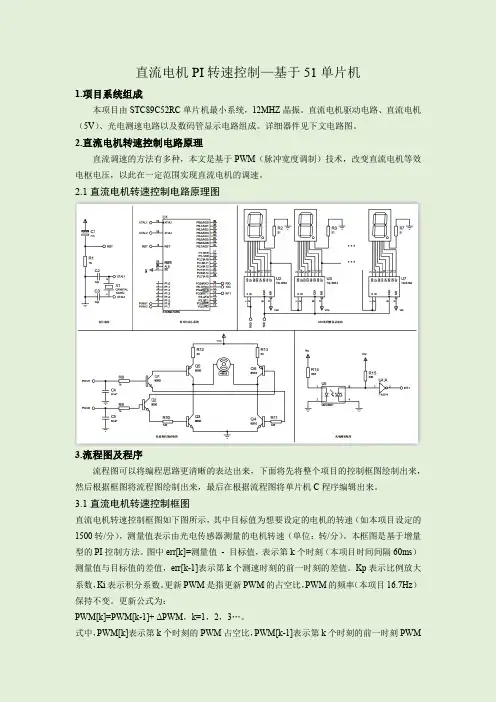
模板本次设计主要研究的是PID控制技术在运动控制领域中的应用,纵所周知运动控制系统最主要的控制对象是电机,在不同的生产过程中,电机的运行状态要满足生产要求,其中电机速度的控制在占有至关重要的作用,因此本次设计主要是利用PID 控制技术对直流电机转速的控制。
其设计思路为:以AT89S51单片机为控制核心,产生占空比受PID算法控制的PWM脉冲实现对直流电机转速的控制。
同时利用光电传感器将电机速度转换成脉冲频率反馈到单片机中,构成转速闭环控制系统,达到转速无静差调节的目的。
在系统中采128×64LCD显示器作为显示部件,通过4×4键盘设置P、I、D、V四个参数和正反转控制,启动后通过显示部件了解电机当前的转速和运行时间。
因此该系统在硬件方面包括:电源模块、电机驱动模块、控制模块、速度检测模块、人机交互模块。
软件部分采用C语言进行程序设计,其优点为:可移植性强、算法容易实现、修改及调试方便、易读等。
本次设计系统的主要特点:(1)优化的软件算法,智能化的自动控制,误差补偿;(2)使用光电传感器将电机转速转换为脉冲频率,比较精确的反映出电机的转速,从而与设定值进行比较产生偏差,实现比例、积分、微分的控制,达到转速无静差调节的目的;(3)使用光电耦合器将主电路和控制电路利用光隔开,使系统更加安全可靠;(4)128×64LCD显示模块提供一个人机对话界面,并实时显示电机运行速度和运行时间;(5)利用Proteus软件进行系统整体仿真,从而进一步验证电路和程序的正确性,避免不必要的损失;(6)采用数字PID 算法,利用软件实现控制,具有更改灵活,节约硬件等优点; (7)系统性能指标:超调量≤8%;调节时间≤4s ;转速误差≤±1r/min 。
1 PID 算法及PWM 控制技术简介PID 算法控制算法是微机化控制系统的一个重要组成部分,整个系统的控制功能主要由控制算法来实现。
pid转速控制系统设计案例
以下是一个PID转速控制系统设计的案例,这个案例采用了PID控制算法
来调节电机的转速。
1. 系统方案
首先,我们需要确定系统的整体方案。
在这个案例中,我们将采用一个比例-积分-微分(PID)控制器来调节电机的转速。
这个方案的目标是让电机的
转速能够快速地响应系统的需求,同时消除稳态误差,并保持良好的动态性能。
2. 控制器设计
接下来,我们需要设计控制器。
在这个案例中,我们将采用一个PID控制器。
PID控制器由比例(P)、积分(I)和微分(D)三个部分组成,通过调整
这三个部分的参数,可以实现对电机转速的精确控制。
3. 参数整定
在确定了控制器的结构之后,我们需要对控制器进行参数整定。
参数整定的目的是为了找到一组最优的参数,使得电机的转速能够快速地响应系统的需求,同时消除稳态误差,并保持良好的动态性能。
4. 系统测试
最后,我们需要对系统进行测试。
在这个案例中,我们将测试电机的转速是否能够快速地响应系统的需求,同时观察系统是否存在稳态误差和动态性能问题。
如果存在这些问题,我们需要对控制器进行重新整定,直到系统的性能满足要求为止。
通过以上步骤,我们可以完成一个PID转速控制系统的设计。
在实际应用中,我们还需要根据具体的系统需求和实际情况对方案进行调整和优化,以达到更好的控制效果。
文档从互联网中收集,已重新修正排版,word格式支持编辑,如有帮助欢迎下载支持。
目录一、设计题目······································································································错误!未定义书签。
二、系统的工作原理 ··························································································错误!未定义书签。
船舶柴油发电机转速的BP-PID并行控制丁茂森;张艳【摘要】针对船舶柴油发电机转速控制问题,结合BP神经网络对非线性系统的高拟合性与经典PID控制的优良性能,形成船舶柴油发电机转速BP.PID并行控制系统。
控制系统中BP神经网络控制器与PID控制器相结合,经过神经网络控制器的不断训练学习,控制器获取船舶柴油发电机转速系统的模型,并逐渐地由BP 神经网络控制器占主要控制作用,从而达到对系统的实时控制。
仿真结果证明了该方法的可行性。
%Aimed at speed control of marine diesel engine generator, and combined with BP neural network for nonlinear systems of the high fit and the advantage of classical PID control, BP neural network and PID parallel control system is built. Under the combined controllers of BPNN and PID control system, a model of marine diesel engine generator is obtained through continuous training and learning of the BPNN controller, and the BPNNC is gradually used for main control, and a real-time control for the system is enabled. Simulation results show that the method is feasible.【期刊名称】《船电技术》【年(卷),期】2012(032)012【总页数】4页(P15-18)【关键词】船舶柴油发电机组;转速控制;BP神经网络;PID控制【作者】丁茂森;张艳【作者单位】上海海事大学物流工程学院,上海201306;上海海事大学物流工程学院,上海201306【正文语种】中文【中图分类】TP271.40 引言目前,船舶柴油发电机转速控制系统中仍然采用经典PID反馈控制,并作为船舶发电机组的主要控制方式。
摘要在运动控制系统中,电机转速控制占有至关重要的作用,其控制算法和手段有很多,模拟PID控制是最早发展起来的控制策略之一,长期以来形成了典型的结构,并且参数整定方便,能够满足一般控制的要求,但由于在模拟PID控制系统中,参数一旦整定好后,在整个控制过程中都是固定不变的,而在实际中,由于现场的系统参数、温度等条件发生变化,使系统很难达到最佳的控制效果,因此采用模拟PID控制器难以获得满意的控制效果。
随着计算机技术与智能控制理论的发展,数字PID技术渐渐发展起来,它不仅能够实现模拟PID所完成的控制任务,而且具备控制算法灵活、可靠性高等优点,应用面越来越广。
本设计以上面提到的数字PID为基本控制算法,以AT89S51单片机为控制核心,产生占空比受数字PID算法控制的PWM脉冲实现对直流电机转速的控制。
同时利用光电传感器将电机速度转换成脉冲频率反馈到单片机中,实现转速闭环控制,达到转速无静差调节的目的。
在系统中采128×64LCD显示器作为显示部件,通过4×4键盘设置P、I、D、V四个参数和正反转控制,启动后可以通过显示部件了解电机当前的转速和运行时间。
该系统控制精度高,具有很强的抗干扰能力。
关键词:数字PID;PWM脉冲;占空比;无静差调节前言21世纪,科学技术日新月异,科技的进步带动了控制技术的发展,现代控制设备的性能和结构发生了翻天覆地的变化。
我们已进入高速发展的信息时代,控制技术成为当今科技的主流之一,广泛深入到研究和应用工程等各个领域。
控制理论的发展经历了古典控制理论、现代控制理论和智能控制理论三个阶段。
其控制系统包括控制器﹑传感器﹑变送器﹑执行机构﹑输入输出接口。
控制器的输出经过输出接口﹑执行机构、加到被控系统上;控制系统的被控量、经过传感器、变送器、通过输入接口送到控制器。
不同的控制系统、传感器﹑变送器﹑执行机构是不一样的。
比如压力控制系统要采用压力传感器。
电加热控制系统的传感器是温度传感器。
目录一、设计题目 (1)二、系统的工作原理 (2)三、BP神经网络 (3)3.1BP神经网络结构 (3)3.2BP网络学习算法 (4)四、基于BP神经网络的PID控制器 (6)4.1PID控制器 (6)4.2基于BP神经网络的PID控制器 (7)五、程序代码及结果分析 (10)5.1程序代码 (10)5.2仿真结果 (13)六、结论 (15)一、设计题目柴油-电力机车传动电机的转速控制柴油机有着十分广泛的用途,它可用来驱动内燃机车的传动电机,从而保证重型列车的正常运行。
但是柴油机的工作效率对转速非常敏感,因此为了提高其工作效率,应该控制传动电机的转速。
图中给出了柴油内燃机车的电力传动模型。
图1-1 转速控制模型移动输入电位计的游标,可设置控制阀的位置,从而设定传动电机的预期转速w r 。
负载转速w 0是受控变量,其实际值由测速机测量。
测速机由电机轴上的皮带驱动,其输出电压v 0是系统的反馈变量。
由于输入电位计提供了预期参考电压,由此可求得参考电压与反馈电压间的偏差为( v r - v 0 )。
放大器将偏差电压放大后,生成电压信号v f ,并用作直流发电机的线圈磁场电压。
在电力传动系统中,柴油机的输出转速恒为w q ,直流发电机由柴油机驱动,其输出电压V g 是电枢控制直流电机的驱动电压。
此外电枢控制直流电机的励磁磁场电流i 也保持恒定不变。
在上述条件下,由于V R 的作用,直流电机将产生力矩T ,并使负载转速w 0逐渐趋近于预期转速w r 。
已知:● 电机的反电动势系数为Kb =31/50;● 与电机有关的参数为J=1,b=1,La=0.2,Ra=1; ● 发电机有关的参数为励磁电阻Rf=1,励磁电感Lf=0.1,Lg=0.1,Rg=1;柴油机 w rv rv 0v d 常量放大器i f L f R fi a L a R a发电机电机测速机负载w 0,J ,bv fV g● 测速机增益Kt=1;●发电机常数Kg ,电机常数Km 自定;二、系统的工作原理本系统利用移动输入电位计的游标,可设置控制阀的位置,从而设定传动电机的预期转速w r ,在移动输入电位计两端加有电源,每当游标移动一定距离,电位计上输出电压也跟随变化,该变化的电压(由输入电位计提供的的预期参考电压)与电动机反馈回来的电压值v 0进行比较,得到一个电压差v r - v 0。
在能源消费日益严重的今天,越来越多的人们将节能产品放在消费的首选之作。
为此,汽车这一行业也在开始进行节能减排的低耗油汽车研制,就目前来说,混合动力是汽车工业竞争之下的新技术之一,这种技术能够有效的节省能源,并且在科技日益发展的今天,使电控技术逐渐完美,让混合动力由汽车向电车转变。
1 混合动力汽车概述 在混合动力车辆开发的过程当中存在非常多的问题,需要去攻克,其最大的问题就是发动机转速出现剧烈的震荡现象,因此在驾驶过程当中离合器接合会呈现出非常多的问题,混合驱动效率大大降低,这样会导致整个混合动力汽车的经济性变坏。
但是在人为操作过程当中能够使用离合器转化消除两个动力源的不同步现象,但是在高速的摩擦过程当中就会导致离合器组从动摩擦盘烧毁,继而出现寿命下降的现象。
就整个发动机的自身而言,一旦速度失去控制,就会造成发动机的转速出现大幅度的震荡,这样也会造成发动机飞车熄火等一系列现象,在这种情况之下,振动和噪声一旦加大,就会出现发动机气门开度自动调节,这样也能够消除发动机转速所带来的波动。
2 混合动力汽车发动机转速控制的有效实现2.1 利用控制器对转速进行控制 转速控制的方法非常之多,那么要使用控制器进行控制,最主要的手段就是控制好发动机气门的开关,一旦发动机的气门开关得到良好的控制,那么油门踏板的传感器,也会得到相应的控制,这些,转距的信息接收就会得到有效的体现。
这是对控制器在实施过程当中会受到很多因素的影响,所以要根据不同的情况而制定,根据不同的情况把控控制器,会节省能源消耗,大概所有的操作完成之后,就会将这些信号发送至EMS,这时中枢控制器就会借助模拟信号,对发动机的气门这些有效的调节控制,在这一过程当中,最大的优势就在于,对于发动机运行状态的信息得到有效的把控,实现了对转速的闭环控制。
2.2 实施外环控制 实施外环控制的主要方法是利用PID计算,将计算所得的结果,通过实际情况,进行扭矩之间的适当调整,所调整之后的数据,必须要满足抵抗震荡的需要,还需要达到抗饱和的作用。
本科毕业设计单片机PID控制直流电机转速学生姓名:学生学号:院(系):电气信息工程学院年级专业:电子信息工程指导教师:助理指导教师:二〇一五年五月本科毕业设计(论文)摘要摘要在运动控制系统中,对电机转速的控制有着十分重要的作用,其控制的手段,方式与算法很多。
模拟PID控制是起源比较早的控制策略之一,经过长期的发展,形成了典型的结构,参数整定相对方便,并且能满足一般的控制场景;但不足的是在模拟PID控制系统中,参数一旦整定,在整个控制过程中都是不能改变的,而在实际中,由于现场的系统参数、速度、温度等环境时刻改变,使系统难以到最佳的控制效果,故采用模拟PID控制较难获得令人满意的控制效果。
随着计算机技术与智能控制理论的发展,数字PID技术渐渐发展起来,它不仅能够实现模拟PID所完成的控制任务,而且具备控制算法灵活、可靠性高等优点,应用面越来越广。
本设计以上面提到的数字PID为基本控制算法,以STM32F103C8单片机为控制核心,产生占空比受数字PID算法控制的PWM脉冲实现对直流电机转速的控制。
同时利用光电传感器将电机速度转换成脉冲频率反馈到单片机中,实现转速闭环控制,达到转速无静差调节的目的。
在系统中采用OLED显示屏作为显示部件,通过4×4矩阵键盘设定转速,启动,启动后可以通过显示部件了解电机当前的转速,当前误差。
该系统控制精度高,具有很强的抗干扰能力。
关键词PID,PWM脉冲,占空比,无静差调节本科毕业设计(论文)ABSTRACTABSTRACTIn the motion control system, the motor speed control has a very important role in many of its control means, methods and algorithms. Analog PID control is the origin of one of the control strategies earlier, after a long-term development, the formation of a typical configuration, parameter setting is relatively easy, and can meet the general control of the scene; but the downside is that the analog PID control systems, parameter once tuning, the entire control process is not changed, but in practice, due to system parameters scene, speed, temperature and other environmental changes in time, the system is difficult to control the best results, it is difficult to obtain using analog PID control satisfactory control effect. With the computer technology and intelligent control theory, digital PID technology gradually developed, it can not only realize the analog PID control tasks completed, and includes a control algorithm flexible, high reliability, application surface and wider.The design of digital PID control the above-mentioned basic algorithm to STM32F103C8 microcontroller core, the duty cycle by a digital PID algorithm generates the PWM pulse control to achieve DC motor speed control. At the same time the use of photoelectric sensors to convert the motor speed to pulse frequency back to the SCM, closed-loop speed control, to speed static error adjustment purposes. OLED display using a display unit in the system, by 4 ×4 matrix keyboard set the speed, start by displaying part of the current understanding of the motor speed, the current error after starting. The system control and high precision, has a strong anti-jamming capability.Key words PID, PWM impulse, dutyfactor, astatic modulation目录摘要 (I)ABSTRACT (II)1 绪论 (1)1.1课题背景 (1)1.2国内外研究现状和水平 (1)1.3 PID控制器的发展趋势 (2)2 设计方案与论证 (3)2.1设计要求和技术指标 (3)2.1.1基本功能 (3)2.1.2技术指标 (3)2.2 系统设计方案 (3)2.3 控制器模块设计方案 (4)2.4 电机驱动模块设计方案 (4)2.5 速度采集模块设计方案 (5)2.6 显示模块设计方案 (5)2.7 键盘模块设计方案 (6)2.8 电源模块设计方案 (6)2.9 确定方案 (7)3 硬件电路设计 (8)3.1 STM32F103C8最小系统 (8)3.1.1 STM32F103xx简介 (8)3.1.2 STM32F103XX管脚图与原理图 (9)3.2 4x4矩阵键盘 (10)3.3 L298N电机驱动模块 (10)3.4 光电编码器 (11)3.5 OLED显示屏 (12)3.5.1 OLED简介 (12)3.5.2 四线串行信号线选择及时序图 (12)3.5.3 OLED驱动芯片SSD1306 (13)4 软件设计 (14)4.1 PID简介及算法实现 (14)4.1.1 PID简介 (14)4.1.2 PID算法实现 (14)4.2 主函数流程图 (15)4.3 定时中断速度采集 (16)4.3.1 STM32F103xx通用定时器简介 (16)4.3.2 速度采集原理及定时器流程图 (17)4.4 外部中断及中断处理流程图 (17)4.4.1 外部中断/事件控制器(EXTI) (17)4.4.2 键盘中断处理流程图 (18)5 系统测试结果 (19)5.1 系统调试数据 (19)5.2 系统效果图 (20)结论 (21)参考文献 (22)附录A (23)附录B (42)致谢.............................................................................................................. 错误!未定义书签。
∑∑==+=+=kj i pkj Isp j e K k e Kj e T Tk e K k u 0)()(])()([)( (3.60)= kp * e(k) + yn(k+1)= kp * e(k) + ki * e(k) + yn(k)= K1*(kp * e(k) + ki * e(k) + yn(k) )//K1为寄存器比例系数,下一程序取64.目的是能转化成MCU 调节//**************************************************************************** // @Function// C calling format: //// int pi_controller32(long *pi_parameter,int reference,int actual) ////---------------------------------------------------------------------------- // @Description //// PI-Controller// derived from transfer function G = kp + 1/(p*Ti)//// e(k) = reference - actual T0 =// yn(k+1)= yn(k) + ki * e(k) ki = T0/Ti// y(k+1) = yn(k+1) + kp * e(k) * 64//----------------------------------------------------------------------------// Computing time 42 CPU-cycle////----------------------------------------------------------------------------// @Returnvalue//// int "@4" Output of pi_controller64//----------------------------------------------------------------------------// @Parameters////--------------------------- Arguments -------------------------------------// reference : reference value// actual : actual value//// struct pi_parameter// {// long yn; Integral buffer// int kp; Proportional Constant// int ki; Integral Constant// int ymin; Limit value min// int ymax; Limit value max// };////----------------------------------------------------------------------------// @Date 27.11.2004// Condition optimization off / one//**************************************************************************** inline int pi_controller32( PI_array *pi_parameter, int reference, int actual)//inline int pi_controller32(int *pi_parameter, int reference, int actual){int retvalue;__asm( "\n"" mov r8,MCW ;Save MCW register \n"" mov MCW,#0600h ;Set shift left \n"" mov %0,ZEROS ;Load zero in R9 \n"" CoLOAD %0,%2 ;Load Accumulator (High) with %2(reference \n"" CoSUB %0,%3 ;error = reference - actual \n"" CoSTORE r13 ,MAS ;Load error in @R5 \n"" mov r12,[%1+] \n"" CoLOAD r12,[%1+] ;Load yn (integral buffer) in accumulator \n"" mov r11,%1 ;Save parameters addres in R1 \n"" mov r12,[r11+] ;Load Kp (proportional Constant) in R5 \n"" mov r10,[r11+] ;Load Ki = T0/Ti (integral Constant) in R6 \n"" CoMAC r10,r13 ;yn = Ki * error + yn \n"" mov r10,[r11+] ;Load ynmax (limit value max) \n"" mov r9,[r11+] ;Load ynmin (limit value min) \n"" CoMIN %0,r10 ;Limit max yn \n"" CoMAX %0,r9 ;Limit min yn \n"" CoSTORE %2,MAH ;Store yn-high in R4 \n"" CoSTORE %3,MAL ;Store yn-low in R3 \n"" mov [-%1],%2 ;Store R4 in integral buffer(High) \n"" mov [-%1],%3 ;Store R3 in integral buffer(Low) \n"" CoMUL r12,r13 ;Kp * error \n"" CoSHL #6 ;64 * Kp * error \n"" CoADD %3,%2 ;y = yn + (64 * Kp * error) \n"" mov r10,[r11+] ;Load ymax (limit value max) \n"" mov r9,[r11+] ;Load ymin (limit value min) \n"" CoMIN %0,r10 ;Limit max y \n"" CoMAX %0,r9 ;Limit min y \n"" CoSTORE %0,MAH ;Store y-high in %0 (return register) \n"" mov MCW,r8 ;Restore MCW register \n""\n": /* output registers */: "w"(reference),"w"(actual) /* input registers */: "r13","r12","r11","r10","r9","r8" /*scratch registers */);return retvalue; }下文使用的是16位定点DSP ,在计算中不可避免会产生截断误差,为了防止截断误差的累积,本文采用位置式的PI 算法,为了解决上文提到的积分饱和问题,本文采用抑制积分饱和的PI 算法:)()()1()()1()()(n U U e e K n e K n I n I n I n e K n U s pi pi sat i n n n p -=⋅+⋅+-=-+⋅= 其中,当max )(U n U ≥时,max U U s =; 当min )(U n U ≤时,min U U s =;否则)(n U U s =式中,s U 表示抑制积分饱和PI 算法的输出,)(n U 表示本次的PI 调节器的计算结果,p K 表示比例调节系数,i K 表示积分系数,sat K 表示抗饱和系数,)(n I n 为本次积分累加和,max U ,min U 分别表示PI 调节器输出的最大值和最小值,用户可以根据控制量的特性,确定PI 调节器输出的最大值和最小值,例如,当控制对象为占空比时,max U 和min U 的值可分别设置为1和0。
目录一、设计题目 (1)二、系统的工作原理 (2)三、BP神经网络 (3)3.1BP神经网络结构 (3)3.2BP网络学习算法 (4)四、基于BP神经网络的PID控制器 (6)4.1PID控制器 (6)4.2基于BP神经网络的PID控制器 (7)五、程序代码及结果分析 (10)5.1程序代码 (10)5.2仿真结果 (13)六、结论 (15)一、设计题目柴油-电力机车传动电机的转速控制柴油机有着十分广泛的用途,它可用来驱动内燃机车的传动电机,从而保证重型列车的正常运行。
但是柴油机的工作效率对转速非常敏感,因此为了提高其工作效率,应该控制传动电机的转速。
图中给出了柴油内燃机车的电力传动模型。
图1-1 转速控制模型移动输入电位计的游标,可设置控制阀的位置,从而设定传动电机的预期转速w r 。
负载转速w 0是受控变量,其实际值由测速机测量。
测速机由电机轴上的皮带驱动,其输出电压v 0是系统的反馈变量。
由于输入电位计提供了预期参考电压,由此可求得参考电压与反馈电压间的偏差为( v r - v 0 )。
放大器将偏差电压放大后,生成电压信号v f ,并用作直流发电机的线圈磁场电压。
在电力传动系统中,柴油机的输出转速恒为w q ,直流发电机由柴油机驱动,其输出电压V g 是电枢控制直流电机的驱动电压。
此外电枢控制直流电机的励磁磁场电流i 也保持恒定不变。
在上述条件下,由于V R 的作用,直流电机将产生力矩T ,并使负载转速w 0逐渐趋近于预期转速w r 。
已知:● 电机的反电动势系数为Kb =31/50;● 与电机有关的参数为J=1,b=1,La=0.2,Ra=1;● 发电机有关的参数为励磁电阻Rf=1,励磁电感Lf=0.1,Lg=0.1,Rg=1;柴油机 w rv rv 0 v d 常量放大器i f L f R fi a L a R a发电机 电机 测速机 负载w 0,J ,bv fV g●测速机增益Kt=1; ● 发电机常数Kg ,电机常数Km 自定;二、系统的工作原理本系统利用移动输入电位计的游标,可设置控制阀的位置,从而设定传动电机的预期转速w r ,在移动输入电位计两端加有电源,每当游标移动一定距离,电位计上输出电压也跟随变化,该变化的电压(由输入电位计提供的的预期参考电压)与电动机反馈回来的电压值v 0进行比较,得到一个电压差v r - v 0。
电压差V 1输入运算放大器K ,根据放大器“虚短”与“虚亏”方法,放大器K 的放大系数为540,电压差V 1经过放大器K 放大后输出电压信号V 2,并用作直流发电机的线圈磁场电压。
在电力传动系统中,柴油机的输出转速恒为w q ,直流发电机由柴油机驱动,其输出电压V g 是电枢控制直流电机的驱动电压,直流电机带动负载转动并由测速机测量其实际转速w 0。
测速机由电机轴上的皮带驱动,其输出电压v 0是系统的反馈变量。
此外电枢控制直流电机的励磁磁场电流i 也保持恒定不变。
其中,控制系统的被控对象是电动机,发电机;被控量是电压;系统的输入量为转速w r ,输出量为转速w 0;给定量是移动输入电位计,功率放大器K ,测速发电机。
系统模型及结构图如下:图 2-1 系统模型图2-2 系统结构图1()G s 2()G s3()G s 4()G s 1()G s 0(t)系统传递函数求解:由上述框架结构图可以看出该系统为一个四阶系统,为求解方便将其化简成一个二阶系统(除去不大的极点),其结构框图如下图2.3:图2-3 化简后的系统传递函数结构图简化思路如下:由于励磁电感远小于励磁电阻,故励磁电感可以忽略。
建立系统的数学模型和传递函数一般表达式:比较电路 V1=Vr-V0;(Vr 输入电压,V1为偏差电压)回馈电路 电机的反电动势系数为Kb =31/50;放大电路 V 10=1.5(正常工作点);V 2=2e 3v 1 发电机电路:0.11Kg S + 电机电路:1KmS + 测速电路:测速机增益Kt=1;所以系统的开环传递函数为:5400*(10)(10.62)Kg Km G s s Km =+++ 系统的闭环传递函数为: 5400*()(10)(10.62)5400*Kg Km G c s s Km Kg Km=++++ 三、BP 神经网络3.1 BP 神经网络结构大脑是一部不寻常的智能机,它能以惊人的高速度解释感觉器官传来的含糊不清的信息。
它能觉察到喧闹房间内的窃窃私语,能够识别出光线暗淡的胡同中的一张面孔,更能通过不断地学习而产生伟大的创造力。
所谓神经网路系统是利用工程技术手段模拟人脑神经网络的结构和功能的一种技术系统,它是一种大规模并行的非线性动力学系统。
严格地讲神经网络应该称为人工神经网络,为了简化起见,一般省略人工二字直接称神经网络,可简记为 NN(Neural Network)。
由于神经网络具有信息的分布存储、并行处理以及自学习等优点,所以它在信息处理、模式识别,智能控制等领域有着广阔的应用前景。
人工神经网络的着眼点不是利用物理器件来完整的复制生物体中细胞网络,而是采纳其可利用的部分来解决目前计算机或其它系统不能解决的问题,如学习、识别、控制和专家系统等。
随着生物和认知科学的发展,人们对人脑的结构和认知过程的了解越来越深入,促进了人工神经网络技术的发展,越来越多的生物特性将被利用到工程中去。
X1X3X2Y1Y2Y3………图3-1 BP 神经网络结构图BP 神经网络结构如图3-1所示。
由图可见,BP 网络是一种具有三层或三层以上神经元的神经网络,包括输入层、中间层和输出层。
上下层之间实现全连接,而每层神经元之间无连接。
当一对学习样本提供给网络后神经元的激活值从输入层经中间层向输出层传播,在输出层的各神经元获得网络的输入响应。
接下来,按照减少目标输出与实际输出之间误差的方向,从输出层反向经过各中间层回到输入层,从而逐层修正各连接权值,这种算法称为“误差反向传播算法”,即BP 算法。
随着这种误差逆向的传播修正不断进行,网络对输入模式响应的正确率也不断上升。
与感知器不同的是,由于误差反向传播中会对传递函数进行求导计算,BP 网络的传递函数要求必须是可微的,所以不能使用感知器网络中的硬闭值传递函数,常用的有sigmoid 型对数、正切函数或线性函数。
由于传递函数是处处可微的,所以对BP 网络来说,一方面,所划分的区域不再是一个线性划分,而是由一个非线性超平面组成的区域,它是比较平滑的曲面,因而它的分类比线性划分更加精确,容错性也比线性划分更好;另一方面,网络可以严格采用梯度下降法进行学习,权值修正的解析式十分明确。
3.2 BP 网络学习算法设有n 个输入节点1x ,2x ……n x ;q 个输出节点1y ,……n y ;网络层的隐含节点有p 个神经元。
输入层第i 个单元至隐含层第j 个单元连接权j i w ,。
隐含层第j 个单元至输出层第t 个单元连接权t j v ,。
隐含层各单元的阈值为j θ,输出层各个单元的阈值为t γ,在训练该网络的学习阶段,设有N 组训练样本,先假定用其中的某一固定样本k 输入输出模式对网络进行训练。
输入层:n 个输入1x ,2x ……n x ;也就是输入样本。
中间层: j ni i j i j x w s θ+=∑, (1)()j j s S b =;j=1,2……p (2)输出层: ()t t s S =C ;t=1,2,……q (3)t j pj t j t b v L γ+=∑=1, (4)为了模拟生物神经元的非线性特性,激励函数常选用s 函数()xe x S -11+= (5) S 函数不但具有可微分性,而且具有饱和非线性特性,这又增强了网络的非线性映射能力。
S 函数的微分函数为:()x S 。
=()()()x S x S -1 (6) 单元输出闭值是为模拟神经元的闭值电位而设置的,在网络的学习过程中,它和各连接权一样不断的被修正。
阂值的作用反应在S 函数的输出曲线上,使曲线向左平移了阂值大小的单位,它起到了调节神经元兴奋水平的作用。
定义第N 个标准模式的误差函数为:()∑==q t t t k c y E 12-21 (7) 学习过程按使误差Ek 减少最快的方向调整权值系数,直到获得满意的权值为止。
根据梯度下降原则使连接权t j v ,的调整量与tj k v E ,∂∂的负值称比例,连接权的修正公式如下: tj k t j v E v ,,-∂∂=∆η 式中t=l ,2,.……q;j=l,2,……p;0<η<1 ()()j t t t tj t t k t j k t j b L S C d v C C E v E v '=∂∂∂∂=∂∂=∆---,,,ηηη (8)相应的闭值公式为:()()t t t tt t k t k L S C d C C E E '=∂∂∂∂=∂∂=∆---t ηγηγηγ (9) 若连接权值不直接作用于输出层神经元,情况就有所不同了,但仍按梯度下降法ji j j j j kj i j i w s s b b E w E w ,,,--∂∂∂∂∂∂=∂∂=∆ηη (10) ()j j js S s b '=∂∂ (11)()[]()t j t t t j t t t q t t k j k v L S C d b L L C C E b E ,q 1t 1--'=∂∂∂∂∂∂=∂∂∑∑== (12) 于是()()()i j t j t qi t t j i x s S v L S C d w ''=∆∑=,1,-η (13)同理()()()j t j t qi t t j s S v L S C d ''=∆∑=,1-ηθ (14)BP 网络学习算法计算步骤如下:(l)初始化,置所有的连接权值j i w ,,t j v ,,j θ,t γ为随机数(2)提供训练集,即给出顺序赋值的输入向量k X 和期望的输出向量k d 。
(3)计算中间层和输出层的各神经元实际输出。
(4)计算期望输出与实际输出的偏差k E 。
(5)计算t j v ,∆和t γ∆,调整中间层至输出层的连接权和闭值。
(6)计算j i w ,∆和j θ∆,调整输入层至中间层的连接权和闭值。
(7)返回2,直至误差满意为止。
四、基于BP 神经网络的PID 控制器4.1 PID 控制器PID 控制器是一个在工业控制应用中常见的反馈回路部件。
这个控制器把收集到的数据和一个参考值进行比较,然后把这个差别用于计算新的输入值,这个新的输入值的目的是可以让系统的数据达到或者保持在参考值。
和其他简单的控制运算不同,PID 控制器可以根据历史数据和差别的出现率来调整输入值,这样可以使系统更加准确,更加稳定。