2012数字信号处理考研复试真题
- 格式:pdf
- 大小:271.10 KB
- 文档页数:3
模电部分一、给出电路图,求反馈网络的 f A =io V V = ? ,==s o fs V V A ? 二、给出两级运算放大器的电路图,求1o u 和o u 。
三、给出电路图,判断反馈类型。
四、给出二极管电路,画出输出波形。
五、给出三极管的三个电压,判断其工作状态。
微机原理部分一、1、(xxx )10 = ( ?)2 = ( ?)162、已知(xxx H )= xxx ,(xxx H )= xxx ,CS=xxx ,IP=xxx ,SS=xxx ,SP=xxx 。
求(xxx H )=?,(xxx H )=?。
3、给出条件,求中断地址。
二、已知端口的初始地址为1000H ,将00H ……FFH 这256个数存入存储单元中,编程。
三、七块芯片相连(有图),求地址范围。
1、求A 19 A 18 ……A 15的范围,其中 A 0固定。
2、求A 19 A 18 ……A 14的范围,其中 A 0固定。
四、8255A 芯片1、n 块芯片相连(有图),A 7, ……,A 3,A 0固定,求四个地址。
2、已知A 口和B 口的工作方式和输入输出,C 口的输入和输出,编程向四个端口的输出。
通信原理部分一、简答题1、什么是眼图,其模型反应了哪些特性?2、为什么产生突发性错码?常用的纠错方式有哪些?3、HDB3的全称?优点?编码规则?4、常用的数字调制有哪些?什么是倒相?怎样解决倒相问题?二、计算题1、给出条件,计算带宽。
2、给出条件,计算带宽。
(两题目概念相似,我当时也无从下手,在此只能提供一个复习方向)模电部分比较简单,基本概念清楚即可。
微机原理一定要掌握好几种芯片的用法,因为主要就是考芯片地址的计算,还要会编程(很简单的那种)。
通信原理也是很基本的东西掌握了就好。
当然这是去年的情况,因为今年你们减了两门,情况不同,请自己把握。
祝,复试顺利!。
![2012年 信号系统与信号处理 真题 1[3页]](https://uimg.taocdn.com/7c4fbc6fcc22bcd127ff0c80.webp)
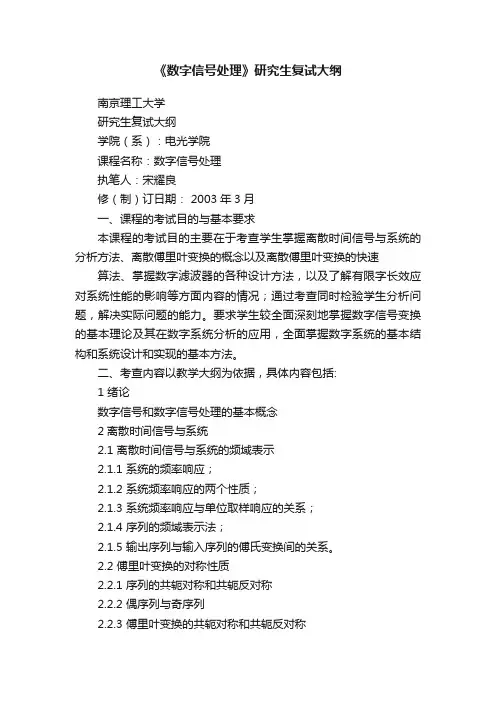
西南交通大学2012-2013学年第( 1 )学期期中考试试卷课程代码 3130100 课程名称 《数字信号处理A 》 考试时间 120分钟阅卷教师签字:一、选择题:(20分)本题共10个小题,每题回答正确得2分,否则得零分。
每小题所给答案中只有一个是正确的。
1.如题图所示的滤波器幅频特性曲线,可以确定该滤波器类型为( C )A.低通滤波器B.高通滤波器C.带通滤波器D.带阻滤波器2. 对5点有限长序列[1 3 0 5 2]进行向右1点圆周移位后得到序列( B ) A.[1 3 0 5 2] B.[2 1 3 0 5] C.[3 0 5 2 1] D.[3 0 5 2 0]3.已知某序列Z 变换的收敛域为5>|z|>3,则该序列为( D )A.有限长序列B.右边序列C.左边序列D.双边序列 4.离散序列x(n)为实、偶序列,则其频域序列X(k)为:( A )。
A .实、偶序列 B. 虚、偶序列 C .实、奇序列 D. 虚、奇序列 5. 用窗函数法设计FIR 低通滤波器,当窗函数类型确定后,取窗的长度越长,滤波器的过渡带越 ( A )A. 窄B. 宽C. 不变D. 无法确定6. 当用循环卷积计算两个有限长序列的线性卷积时,若两个序列的长度分别是N 和M ,则循环卷积等于线性卷积的条件是:循环卷积长度( A )。
A.L≥N+M -1 B.L<N+M-1 C.L=N D.L=M7 序列3π()cos 5x n n ⎛⎫= ⎪⎝⎭的周期为( C )A. 3B. 5C. 10D. ∞8. 在基2 DIT —FFT 运算时,需要对输入序列进行倒序,若进行计算的序列点数N=16,倒序前信号点序号为8,则倒序后该信号点的序号为( C )。
班 级 学 号 姓 名密封装订线 密封装订线 密封装订线A. 8B. 16C. 1D. 49. 已知序列()()x n n δ=,其N 点的DFT 记为X(k),则X(0)=( B )A .N-1B .1C . 0D . N 10. 关于双线性变换法设计IIR 滤波器正确的说法是( D ) A .双线性变换是一种线性变换 B .不能用于设计高通和带阻滤波器C .双线性变换法将线性相位的模拟滤波器映射为一个线性相位的数字滤波器D .需要一个频率非线性预畸变 二、(10分)判断题(对以下各题的说法,认为对的在括号内填“〇”,认为错的在括号内填 “╳”;每小题2分,共10分)1.(〇)用基2时间抽取FFT 计算1024点DFT 的计算量不到直接计算量的二百分之一。
《数字信号处理》研究生复试大纲南京理工大学研究生复试大纲学院(系):电光学院课程名称:数字信号处理执笔人:宋耀良修(制)订日期: 2003年3月一、课程的考试目的与基本要求本课程的考试目的主要在于考查学生掌握离散时间信号与系统的分析方法、离散傅里叶变换的概念以及离散傅里叶变换的快速算法、掌握数字滤波器的各种设计方法,以及了解有限字长效应对系统性能的影响等方面内容的情况;通过考查同时检验学生分析问题,解决实际问题的能力。
要求学生较全面深刻地掌握数字信号变换的基本理论及其在数字系统分析的应用,全面掌握数字系统的基本结构和系统设计和实现的基本方法。
二、考查内容以教学大纲为依据,具体内容包括:1 绪论数字信号和数字信号处理的基本概念2离散时间信号与系统2.1 离散时间信号与系统的频域表示2.1.1 系统的频率响应;2.1.2 系统频率响应的两个性质;2.1.3 系统频率响应与单位取样响应的关系;2.1.4 序列的频域表示法;2.1.5 输出序列与输入序列的傅氏变换间的关系。
2.2 傅里叶变换的对称性质2.2.1 序列的共轭对称和共轭反对称2.2.2 偶序列与奇序列2.2.3 傅里叶变换的共轭对称和共轭反对称2.2.4 傅里叶变换的对称性质3连续时间信号的采样3.1 周期采样3.2 采样的频域表示3.2.1 奈奎斯特采样定理(△)3.3 由样本重构带限信号(★)3.4 连续时间信号的离散时间处理3.4.1 线性时不变离散时间系统3.4.2 冲激响应不变3.5 离散时间信号的连续时间处理3.5.1 非整数延时3.5.2 滑动平均3.6 利用离散时间处理改变采样率(★)3.6.1 采样率按整数因子减小3.6.2 采样率按整数因子增加3.6.3 采样率按非整数因子变化3.7 实际应用考虑的问题3.7.1 消除混叠的预滤波3.7.2 模拟到数字(A/D)转换3.7.3 量化误差分析3.7.4 D/A转换3.7.5 A/D和D/A转换中抽取和内插的应用4 z 变换4.1 z变换的定义和性质4.2 z 变换的存在条件及系统的收敛域4.3 逆z变换5线性时不变 ( LTI ) 系统的变换分析5.1 LTI系统的频率响应5.1.1 理想频率选择性滤波器5.1.2 相位失真和延迟5.2 用线性常系数差分方程所表征的系统函数5.2.1 稳定性和因果性;5.2.2 逆系统(★)5.2.3 有理系统函数的冲激响应5.3 有理系统函数的频率响应5.3.1 单个零点或极点的频率响应5.3.2 多重零极点的例子5.4 幅度和相位特性之间的关系5.5 全通系统5.6 最小相位系统5.6.1 频率响应的补偿5.6.2 最小相位系统的性质5.7 广义线性相位的线性系统(△)5.7.1 线性相位系统5.7.2 广义线性相位5.7.3 因果广义线性相位系统5.7.4线性相位系统与最小相位系统的关系6 离散时间系统结构6.1 线性常系数差分方程的方框图表示6.2 线性常系数差分方程的信号流图表示6.3 IIR系统的基本结构6.3.1 直接型(△)6.3.2 级联型(△)6.3.3 并联型(△)6.3.4 IIR系统中的反馈6.4 转置形式6.5 FIR系统的基本结构6.5.1 直接型(△)6.5.2 级联型(△)6.5.3 线性相位FIR系统的结构(△)6.6 有限精度数值效应概述6.6.1 数的表示法6.6.2 在系统中实现的量化6.8 系数量化的影响6.7.1 IIR系统中系数量化的影响(△)6.7.2 FIR系统中系数量化的影响6.7.3 其它灵敏度分析方法6.8 数字滤波器中舍入噪声的影响6.8.1 直接型IIR结构分析6.8.2 IIR系统定点实现中的幅度加权6.8.3 级联和并联IIR结构分析6.8.4 直接型FIR结构分析6.8.5 离散时间系统的浮点实现6.9 IIR数字滤波器定点实现中的零输入极限环6.9.1 由于舍入和截尾引起的极限环6.9.2 由于溢出而出现的极限环7滤波器设计方法7.1 由连续时间波器设计离散时间IIR滤波器7.1.1 滤波器设计的冲激响应不变法(△)7.1.2 双线性变换法(△)7.1.3 双线性变换法设计举例7.2 低通IIR滤波器的频率变换法7.3 用窗函数法设计FIR滤波器7.3.1 常用窗函数的性质(△)7.3.2 广义线性相位的合并7.3.3 凯泽窗滤波器设计法(△)7.3.4 凯泽窗与其它窗之间的关系7.4 凯泽窗法设计FIR滤波器举例7.4.1 高通滤波器举例7.4.2 离散时间微分器7.6 FIR滤波器的最佳逼近(★)7.6.1 最佳I型低通滤波器7.6.2 最佳II型低通滤波器7.6.3 帕克斯-麦克莱伦算法7.6.4 最佳FIR滤波器的特性7.7 FIR等波纹逼近举例7.7.1 低通滤波器7.7.2 零阶保持器的补偿7.7.3 带通滤波器8离散傅里叶变换8.1 周期序列的表示:离散傅里叶级数8.2 离散傅里叶级数的性质(△)8.2.1 线性;8.2.2 序列的移位8.2.3 对偶性8.2.4 对称性8.2.5 周期卷积8.3 周期序列DFS表示的性质汇总8.4 周期信号的傅里叶变换8.5 对傅里叶变换采样8.5 有限长序列的傅里叶表示:离散傅里叶变换(△)8.7 离散傅里叶变换的性质(△)8.7.1 线性8.7.2 序列的循环移位(★)8.7.3 对偶性8.7.4对称性8.7.5 循环卷积(★)8.8 离散傅里叶变换的性质汇总8.9 用离散傅里叶变换实现线性卷积(△)8.9.1 两个有限长序列的线性卷积8.9.2 循环卷积作为带有混叠的线性卷积8.9.3 用DFT实现线性时不变系统9 离散傅里叶变换的计算9.1 离散傅里叶变换的高效计算9.2 戈泽尔算法9.3 按时间抽取的FFT算法9.3.1 算法原理(△)9.3.2 算法流图(△)9.3.3 算法特点(△)9.3.4 变形的算法流图(★)9.4 按频率抽取的FFT算法9.4.1 算法原理(△)9.4.2 算法流图(△)9.4.3 算法特点(△)9.4.4 变形的算法流图(★)9.5 FFT算法的实现9.5.1 标号排列9.5.2 系数9.5.3 实现FFT的算法流程图9.5.4 实序列FFT算法9.5 复合数N的FFT算法(★)9.5.1 库利-图基算法9.5.2 素因子算法9.6 用卷积实现DFT线性调频变换算法(△)9.7 离散傅里叶变换计算中有限寄存器长度的影响9.7.1 在FFT的直接法计算中量化的分析9.7.2 定点FFT算法中量化效应的分析9.7.3 浮点FFT算法中量化效应小结9.7.4 在FFT中系数量化的影响Alan V. Oppenheim & Ronald W. Schafer,三. 主要参考教材Discrete-Time Signal Processing,(2and ) Prince Hall. (教材)1997.注:课程复试大纲填写说明:重点△,难点★。
一、简答概念题(每题4分)
1、什么是采样
2、什么是微处理器的字长
3、什么情况下计算机控制系统可近似为连续系统
4、采样保持器的作用
5、80836的三种工作方式
6、最小拍控制的不足之处
7、一阶保持器相对于零阶保持器的优缺点
8、位置式PID算法与增量式PID算法的选取原则
9、为什么对存储器采用分段管理的办法
10、计算机控制系统相对于连续系统的优势
11、什么是计算机控制系统的稳定性
12、计算机控制系统的基本性能指标
13、什么是串行通信系统的传输率
14、双线性变换的特点
15、什么是8086的直接寻址
二、大题(每题15分)
1、DAC0832
(1)设计译码电路使DAC0832的地址为0x302H
(2)DAC0832硬件连线
课本P296图10.6右半部分的连线
(3)向下锯齿波的程序设计
2、8253输入2Mhz,输出2ms的脉冲;用通道1,给出通道1地址为0x302,控制字地
址为0x300,编写初始化程序。
(控制字格式已给出)
3、D(s)=(1+0.17s)/(1+0.08s) 用前向差分法求出位置式和增量式的数字控制器
4、W(s)=5/s(s+1) 求单位速度输入输入下的最小拍控制器。

数字信号处理复习题一、选择题1、某系统 y(n) g( n) x(n), g( n) 有界,则该系统(A )。
A. 因果稳定B.非因果稳定C.因果不稳定D. 非因果不稳定2、一个离散系统(D)。
A. 若因果必稳定B. 若稳定必因果C.因果与稳定有关D. 因果与稳定无关3、某系统 y(n) nx(n), 则该系统(A )。
A. 线性时变B. 线性非时变C. 非线性非时变D. 非线性时变 4.因果稳定系统的系统函数 H ( z) 的收敛域是( D)。
A. z 0.9B. z 1.1C. z1.1D.z 0.95. x 1 (n) 3sin(0.5 n) 的周期( A)。
A.4B.3C.2D.16.某系统的单位脉冲响应h(n) ( 1) nu(n), 则该系统(C )。
2A. 因果不稳定B.非因果稳定C.因果稳定D. 非因果不稳定7.某系统 y(n) x(n) 5 ,则该系统(B )。
A. 因果稳定B.非因果稳定C.因果不稳定D. 非因果不稳定8.序列 x(n) a n u( n 1), 在 X ( z) 的收敛域为( A)。
A. z aB. zaC.z a D. z a9.序列 x(n)(1) nu(n) ( 1)n u( n 1), 则 X (z) 的收敛域为( D )。
1 3 12 1 1 1B. zC. z zA. z3 2 D. 223 10.关于序列 x( n) 的 DTFT X (ej) ,下列说法正确的是(C )。
A. 非周期连续函数B.非周期离散函数C.周期连续函数,周期为 2D.周期离散函数,周期为211.以下序列中( D )的周期为 5。
A. x( n)cos( 3n)B. x(n)sin( 3 n)5 588C. x( n) e j ( 2n)x(n)j (2n) 58D. e 5812. x(n)ej (n)3 6,该序列是( A )。
A. 非周期序列B.周期 N6C.周期 N6D.周期N 213. ((4)) 4 ________ 。
课程编号:INF02096 北京理工大学2014 – 2015 学年第一学期2012级机械类数字信号处理B期末试题A卷答案班级学号姓名成绩一、单项选择题(在每小题的四个备选答案中,选出一个正确答案,并将正确答案的序号填在题干的括号内。
每小题2分,共20分)1.在对连续信号均匀采样时,若采样角频率为Ωs ,信号最高截止频率为Ωc,则折叠频率为 ( D ) 。
A. Ωs B. ΩcC. Ωc/2 D. Ωs/22.序列x(n)=Re(e jnπ/12)+I m(e jnπ/18),周期为( B )。
A.18B. 72C. 18πD. 363.下列系统(其中y(n)为输出序列,x(n)为输入序列)中哪个属于线性系统?( D )A.y(n)=x3(n)B.y(n)=x(n)x(n+2)C.y(n)=x(n)+2D.y(n)=x(n2)4.对于离散时间傅立叶变换而言,其信号的特点是( D )。
A. 时域连续非周期,频域连续非周期B. 时域离散周期,频域连续非周期C. 时域连续周期,频域离散非周期D. 时域离散非周期,频域连续周期5. 已知 x(n)= δ (n) , N 点的 DFT [ x(n) ] =X(k) ,则 X(5)=( B ) 。
A.NB.1C.0D.- N6. 设点数为4的序列x(n)=2n R4(n),y(n)为x(n)的一圆周移位:y(n)=x(n-2),则y(1)=( D )A.1 B.2 C.4 D.87. 计算n=2m(m为整数)点的按时间抽取基-2FFT需要( A )级蝶形运算。
A.m B.l/2 C.N D.N/28. 下列各种滤波器的结构中哪种不是 I I R 滤波器的基本结构 ( D ) 。
A. 直接型B. 级联型C. 并联型D. 频率抽样型9. 以下对双线性变换的描述中正确的是 ( C ) 。
A. 双线性变换是一种线性变换B. 使用的变换是 s 平面到 z 平面的多值映射C. 双线性变换是一种分段线性变换D. 不宜用来设计高通和带阻滤波器10.下列关于窗函数设计法的说法中错误的是( D )。
西安邮电学院2012年硕士研究生复试数字信号处理1.“累加器系统”的差分方程为y(n )= ,分析论证“累加器系统”是否满足线性,时不变性,因果性,稳定性。
(20分)2.请写出傅里叶变换对的具体公式。
(5分)请叙述傅里叶变换存在的充分条件。
(5分)3.设指数序列x(n)= ,计算该序列的傅里叶变换(10分);并求出傅里叶变换的存在条件(5分)。
4.试证明:N 阶FIR 滤波器满足第一类线性相位的条件是:h(n)是实序列且对 偶对称。
(20分)5.已知序列x(n),画出其四点DIF-FFT 运算流图,叙述怎么样利用FFT 快速算法计算 IDFT[X(k)].(10分)6. 已知x(n)= , y(n)= ,(1)求x(n)和y(n)的线性卷积h(n);(10分)(2)求x(n)和y(n)的2点和4点循环卷积g1(n)和g2(n);(10分)(3)若用x(n)和y(n)的循环卷积实现线性卷积,循环卷积的N 点数N 满足的条件.(5分)7. 一信号Xa(t)=[1+cos(2π*100t)]cos(2π*600t),用DFT 做频谱分析,能分辨Xa(t)的所有频率分量,问:(1)抽样频率应为多少HZ ,抽样时间间隔为多少Sec ;(5分)(2)抽样点数N 应为多少;(5分)(3)在频带宽度不变的情况下,求频率分辨率提高一倍N 的值。
(5分) ∑-∞=nk k x )()(n u an 2)1(-N ⎪⎩⎪⎨⎧==,其它,,01n 10n 1⎪⎩⎪⎨⎧==,其它,,01n 20n 1-8.令 (z )=1-0.36 -1.1 +0.8 ,(z) =1-0.81 -0.68 -0.25,= ,1) 画出 直接实现的信号流图;(5分)2)画出 直接实现的信号流图;(5分)3) 和 分别代表何种类型的数字滤波器。
(5分)9.谈谈你对时域采样定理,频域采样定理,傅里叶变换,傅里叶反变换之间联系的认识。
(20分) )()(21z z H H H 3H 2H 1z 1-z 2-z 3-z 1-z 2-z 3-H 3H 1H 1H 3。
杭电2012考研复试题(全版)一简答题(一个5分,共10个)1写出运算放大器5个及以上主要性能指标。
2写出直流稳压电源5个及以上主要性能指标。
3如图正弦波振荡电路,(1)若R1短路,电路会发生什么变化?;(2)若Rf短路,电路会发生什么变化?;(3)若R1断路,电路会发生什么变化?;(4)若Rf断路,电路会发生什么变化?4请解释信号与系统中“带宽”与“宽带”的涵义。
5八位DAC的最大输出电压为5.1 V,则单位量化电平为多少?当输入数字量1000 0000和1000 1000时,输出分别为多大电压?6请解释LC振荡器的稳定度?如何能提高LC振荡器的稳定度?7单片机的UART与PC机串口通信,需要什么芯片能实现电平转换?若输入为10帧,则各帧该如何分配?8滤波器在高频和微波电路中的运用很广泛,滤波器按功能分为哪几种?有哪些主要性能指标?9解释说明共模抑制比Kcmr。
10声波,电台信号,手机信号以及红外光线的传播速度各为多少?以高到低排序。
二计算题(6选5,一题10分)1求电路实现的功能2如图,其中R1=50KΩ,R2=R3=100KΩ,R4=2KΩ。
(1)求Ui与Uo之间的关系(2)求输入电阻3如图,输入正弦波,电路表读数A1:4A;A2:3A;A3:6A。
(1)求电路表A的读数(2)当A1的读数不变,若电压频率提高,A2,A3读数如何变化?(3)若输入为直流电压,A读数为0.1A,则A1,A2,A3读数为多少?4好像是关于获得锯齿波的电路5单片机P1口分别接共阳数码管的8段(P1.0接a段… …P1.7接dp段)若要显示字符P,则P1为多少?(分别用C51编程和汇编语句实现)6如图,IC实现的功能是依次让引脚1到10输出高电平,且当引脚Clear为高电平时,IC 清零。
(1)说明电路实现的功能(2)电阻R1和R2分别起什么作用(3)若三极管的饱和压降为0.3V,为使流过发光二极管的电流为5mA~20mA,求R2的电阻范围(4)说明发光二极管的发光原理。
一. NUPT2012 数字信号处理复试-填空题(1*20’)1.解释DTFT (中文或英文全称),DTFT 与DFT 的关系 .2.已知一个零点为1+j,其余三个零点分别为, , .3.窗函数加窗系数对频谱的两个影响是 ,. 解释什么事吉普斯(Gips )效应:。
4.。
5. , 收敛域为 。
6.N 点DFT 复乘次数为,N 点FFT 复乘次数为。
7.脉冲响应不变法可设计低通,以及 。
(高通,带通,带阻)8.模拟频率2 对应数字频率2 ,则数字频率 对应模拟频率 。
9. ,若满足线性相位条件,则。
10. ,则该系统是 。
(高通,低通,带通) 11.误差包括输入信号量化效应,, 。
二. 判断题(2*5’,错的给出解释)1.极点都在单位圆内,则该系统一定稳定。
2.采样是线性过程,量化是非线性过程。
3.预畸能解决频率轴的非线性变换问题。
4.不管N 为何值,N 点FFT 按时间抽取,输入均可按位倒置,从而方便地获得输出结果。
5.级联型容易控制极点,但不容易控制零点。
114()()()2(1),()323n n h n u n u n H Z =----=则5()()2(1)3(2)4(3)5(4),(-2)R n =x n n n n n n x n δδδδδ=+-+-+-+-则()s f ππ123412()13H Z a Z a Z Z Z ----=+++-1a =2a =1()(1)(.....)H Z Z -=+三. 简答(2*5’)1. 采样是否是线性过程?采样过后能否恢复原信号?如果能的话条件是什么?量化是否是线性过程,为什么?2. IIR 与FIR 的区别。
(至少3点)四. 计算(60’)1. 为实数,已知该系统是因果,线性移不变系统(1).求H(Z),零极点图;(2).求收敛域;(3).分 三种情况求h(n),并判断稳定性。
2. 画出4点DIT 。
3. 求序列{1,2,3},{3,2,1}(1)线性卷积;(2)N=4圆周卷积;(3)以上结果是否一致,为什么?试解释.()(1)(),y n ay n x n a --=0,01,1a a a =<<>4. 双线性变换法求H(Z),已知,求H(Z),并画出正准型结构。
2012年全国硕士研究生入学统一考试计算机科学与技术学科联考计算机学科专业基础综合试题一、单项选择题:第1~40小题,每小题2分,共80分。
下列每题给出的四个选项中,只有一个选项最符合试题要求。
1.求整数n(n≥0)阶乘的算法如下,其时间复杂度是()。
int fact(int n){if(n<=1)return 1;return n*fact(n-1);}A.O(log2n)B.O(n)C.O(nlog2n)D.O(n2)2.已知操作符包括‘+’、‘-’、‘*’、‘/’、‘(’和‘)’。
将中缀表达式a+b-a*((c+d)/e-f)+g转换为后缀表达式ab+acd+e/f-*-g+时,用栈来存放暂时还不能确定运算次序的操作符。
若栈初始时为空,则转换过程中同时保存在栈中的操作符的最大个数是()。
A.5B.7C.8D.113.若一棵二叉树的前序遍历序列为a,e,b,d,c,后序遍历序列为b,c,d,e,a,则根结点的孩子结点()。
A.只有e B.有e、b C.有e、c D.无法确定4.若平衡二叉树的高度为6,且所有非叶结点的平衡因子均为1,则该平衡二叉树的结点总数为()。
A.12B.20C.32D.335.对有n个顶点、e条边且使用邻接表存储的有向图进行广度优先遍历,其算法的时间复杂度是()。
A.O(n)B.O(e)C.O(n+e)D.O(n×e)6.若用邻接矩阵存储有向图,矩阵中主对角线以下的元素均为零,则关于该图拓扑序列的结论是()。
A.存在,且唯一B.存在,且不唯一C.存在,可能不唯一D.无法确定是否存在7.对如下有向带权图,若采用迪杰斯特拉(Dijkstra)算法求从源点a到其他各顶点的最短路径,则得到的第一条最短路径的目标顶点是b,第二条最短路径的目标顶点是c,后续得到的其余各最短路径的目标顶点依次是()。
A.d,e,f B.e,d,fC.f,d,e D.f,e,d8.下列关于最小生成树的说法中,正确的是()。
选择题在数字信号处理中,下列哪个步骤不是典型的信号处理流程的一部分?A. 采样B. 量化C. 编码D. 滤波(正确答案)离散时间信号x[n]与h[n]的卷积定义为y[n] = x[n] * h[n],则y等于:A. xh + xh + xh (正确答案)B. xh + xh + xhC. xhD. xh + xh + xh下列哪项不是数字滤波器的优点?A. 精度高B. 稳定性好C. 对模拟元件依赖性强(正确答案)D. 可编程性强在Z变换中,若X(z)是序列x[n]的Z变换,则x[n-1]的Z变换为:A. zX(z)B. z-1X(z)(正确答案)C. X(z)/zD. X(z) - x下列哪种滤波器可以无失真地通过直流分量?A. 高通滤波器B. 低通滤波器(正确答案)C. 带通滤波器D. 陷波滤波器在频域采样定理中,为了避免混叠现象,采样频率fs应满足:A. fs > 2BB. fs ≥ 2B(正确答案)C. fs < 2BD. fs ≤ 2B下列哪项不是DFT(离散傅里叶变换)的性质?A. 线性B. 周期性C. 奇偶性(正确答案)D. 卷积定理在IIR滤波器设计中,双线性变换法主要用于将哪种滤波器转换为数字滤波器?A. 低通B. 高通C. 模拟滤波器(正确答案)D. 数字滤波器下列哪项不是FIR滤波器(有限脉冲响应滤波器)的特点?A. 系统函数具有有限个零点B. 系统函数具有无限个极点(正确答案)C. 总是稳定的D. 具有线性相位特性。
NUPT2012数字信号处理复试---By NJUPT_ZZK
一. 填空题(1*20’)
1. 解释DTFT (中文或英文全称),DTFT 与DFT 的关系 .
2. 已知一个零点为1+j,其余三个零点分别为 , , .
3. 窗函数加窗系数对频谱的两个影响是 , . 解释什么事吉普斯(Gips )效应: 。
4.。
5. ,
收敛域为 。
6. N 点DFT 复乘次数为 ,N 点FFT 复乘次数为 。
7. 脉冲响应不变法可设计低通,以及 。
(高通,带通,带阻)
8. 模拟频率2 对应数字频率2 ,则数字频率 对应模拟频率 。
9. ,若满足线性相位条件,则 。
10. ,则该系统是 。
(高通,低通,带通) 11. 误差包括输入信号量化效应, , 。
二. 判断题(2*5’,错的给出解释)
1. 极点都在单位圆内,则该系统一定稳定。
2. 采样是线性过程,量化是非线性过程。
3. 预畸能解决频率轴的非线性变换问题。
4. 不管N 为何值,N 点FFT 按时间抽取,输入均可按位倒置,从而方便地获得输出结果。
5. 级联型容易控制极点,但不容易控制零点。
114()()()2(1),()323n n h n u n u n H Z =----=则5()()2(1)3(2)4(3)5(4),(-2)R n =x n n n n n n x n δδδδδ=+-+-+-+-则()s f ππ123412()13H Z a Z a Z Z Z ----=+++-1a =2a =1()(1)(.....)
H Z Z -=+
三. 简答(2*5’)
1. 采样是否是线性过程?采样过后能否恢复原信号?如果能的话条件是什么?量化是否
是线性过程,为什么?
2. IIR 与FIR 的区别。
(至少3点)
四. 计算(60’)
1. 为实数,已知该系统是因果,线性移不变系统
(1).求H(Z),零极点图;
(2).求收敛域;
(3).分 三种情况求h(n),并判断稳定性。
2. 画出4点DIT 。
3. 求序列{1,2,3},{3,2,1}
(1)线性卷积;
(2)N=4圆周卷积;
(3)以上结果是否一致,为什么?试解释.
()(1)(),y n ay n x n a --=0,01,1a a a =<<>
4. 双线性变换法求H(Z),已知
,求H(Z),并画出正准型结构。
5. ,画出并联型以及级联型结构。
6. X(n)={1,0,1,0,1,2,1,2},只用一次4点FFT 求x(n)8点X(k),详细写出每一个步骤,并根据每
一步算出X(k)。
500,2000,c s f HZ f HZ ==二阶归一化方程为()H Z =1
1210.5()132Z H Z Z Z ---+=-+。