MATLAB_6 SIMULINK动态系统仿真
- 格式:ppt
- 大小:863.50 KB
- 文档页数:17
Simulink动态系统仿真入门Simulink是基于MA TLAB的图形化仿真设计环境,是MATLAB 提供的进行动态系统建模、仿真和综合分析的集成软件包。
它使用图形化的系统模块对动态系统进行描述,并在此基础上采用MATLAB 的计算引擎对动态系统在时域内进行求解。
它可以处理的系统包括:线性、非线性、离散、连续及混合、单任务、多任务离散事件等。
在MATLAB7.X版本中,可以直接在Simulink环境中运作的工具箱和模型库很多,已经覆盖了航天、航空、通信、控制、信号处理等等诸多领域,涉及内容专业性很强。
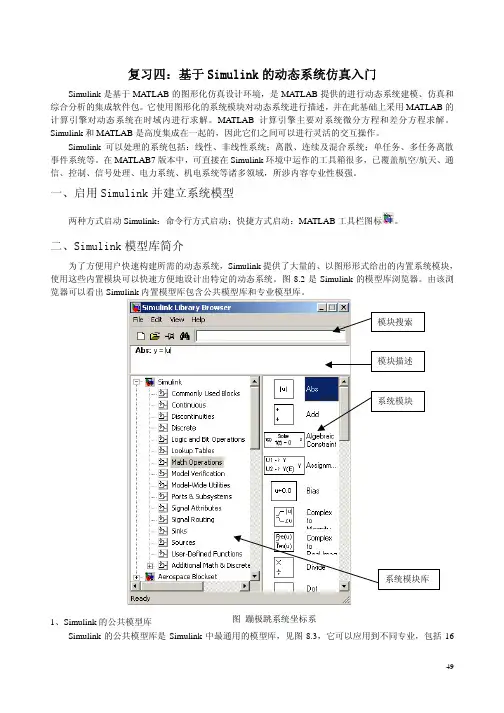
1、Simulink系统的启动由于Simulink和MATLAB是高度集成在一起的,因此启动Simulink必须先启动MA TLAB。
在MA TLAB启动Simulink可以通过在命令窗口输入Simulink,或者点击MATLAB工具栏的Simulink 快速启动图标。
启动Simulink后,出现Simulink的主窗口,选择主菜单File中的New\model,即可以打开系统模型编辑器。
下图依次是MATLAB 主窗口、Simulink主窗口和系统模型编辑窗口,图中的箭头表示了操作顺序。
在打开一个新的系统模型文件以后,用户可以从Simulink模块库中选择适合的系统模块或自定义模块来建立系统模型。
我们通过一个简单的例子来分步说明Simulink建模和仿真的能力。
1)在MATLAB 窗口运行Simulink。
打开Simulink模块库浏览器。
2)点击Source子库前的“+”展开库,可以看到各种信源模块。
3)点击新建图标,打开一个空白型的模型窗口。
4)用鼠标选中需要的信源模块,把它拖入新建的空白模型编辑窗口,生成一个正弦波的复制品。
5)同样将信宿库Sinks中的示波器Scope拷贝到模型窗口。
6)利用鼠标完成两个模块的连线操作,完成一个简单的模型。
7)为进行仿真,双击示波器模块,打开示波器显示屏。

目录MATLAB/Simulink 与控制系统仿真课程设计 (1)一、课题设计目的 (3)二、课题设计要求 (3)1.实现单回路控制系统的设计及仿真 (3)2.实现串联控制系统的设计与仿真 (3)3.实现反馈前馈控制系统设计及仿真 (3)三、课题设计内容与步骤 (3)1.实现单回路控制系统的设计及仿真 (3)(1)原始单回路的单位阶跃曲线: (4)(2) P 调节 (4)(3) PI 调节 (5)(4) PID 调节 (5)(5) 总结: (6)2. 实现串联控制系统的设计与仿真 (6)(1).建立开环传递函数 (6)(2).设计串联校正器的滞后环节 (8)(3).设计串联校正器的超前环节 (8)(4).对照校正先后的系统频率响应 (9)(5).系统校正先后的阶跃响应曲线 (10)(6)结论: (12)3.实现反馈前馈控制系统设计及仿真 (12)(1).开环传递函数模型 (12)(2).分析系统的频率响应特性 (13)(3).设计反馈校正器环节 (13)(4).设计前馈校正器环节 (14)(5).设计前向通道 (15)(6).设计前向通道与前馈通道并联连接 (16)(7).设计反馈前馈校正器环节 (16)(8).对照校正先后的系统频率响应 (17)(9).系统校正先后的阶跃响应曲线 (18)(10).总结: (20)四、心得体味 (20)进行PID 控制器设计与应用1.实现单回路控制系统的设计及仿真2.实现串联控制系统的设计与仿真3.实现反馈前馈控制系统设计及仿真P 调节器公式Wc (s) =20.经P 控制后的单回路的单位阶跃曲线:P 控制只改变系统的增益而不影响相位,它对系统的影响主要反映在系统的稳态误差和稳定性上,增大比例系数可提高系统的开环增益、减小系统的稳态误差,从而提高系统的控制精度,但这会降低系统的相对稳定性。
PI 调节器公式Wc (s) =20+3/s.经PI 控制后的单回路的单位阶跃曲线:PI 控制器可以使系统在进入稳态后无稳态误差。
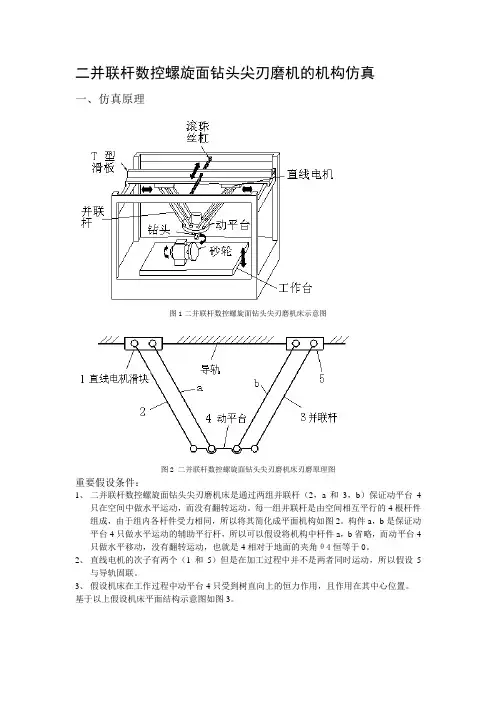
二并联杆数控螺旋面钻头尖刃磨机的机构仿真一、仿真原理图1二并联杆数控螺旋面钻头尖刃磨机床示意图图2 二并联杆数控螺旋面钻头尖刃磨机床刃磨原理图重要假设条件:1、二并联杆数控螺旋面钻头尖刃磨机床是通过两组并联杆(2,a和3,b)保证动平台4只在空间中做水平运动,而没有翻转运动。
每一组并联杆是由空间相互平行的4根杆件组成,由于组内各杆件受力相同,所以将其简化成平面机构如图2。
构件a,b是保证动平台4只做水平运动的辅助平行杆,所以可以假设将机构中杆件a,b省略,而动平台4只做水平移动,没有翻转运动,也就是4相对于地面的夹角θ4恒等于0。
2、直线电机的次子有两个(1和5)但是在加工过程中并不是两者同时运动,所以假设5与导轨固联。
3、假设机床在工作过程中动平台4只受到树直向上的恒力作用,且作用在其中心位置。
基于以上假设机床平面结构示意图如图3。
图3二并联杆数控螺旋面钻头尖刃磨机床简化机构平面结构示意图二、建立仿真方程C2=cos(θ2) S2=sin(θ2) C3=cos(θ3) S3=sin(θ3)一)力方程(分别对各个杆件进行受力分析)对动平台4:受力分析如图4F24x+F43x=m4*Ac4x (1)F24y+F43y=m4*Ac4y (2)F24y*rc4-F43y*rc4=0 (3)图4动平台4的受力分析对并联杆2:受力分析如图5F12x+F24x=-m2*Ac2x (4)F12y+F24y=-m2*Ac2y (5)F12x*rc2*S2+F12y*rc2*C2-F24x*rc2*S2-F24y*rc2*C2=I2*α2 (6)图5并联杆2的受力分析对直线电机滑块1:受力分析如图6Fm+F12x=m1*r1_dot_dot (7)Fy=F12y (8)图6直线电机滑块1的受力分析对并联杆3:受力分析如图7图7并联杆3的受力分析二)闭环矢量运动方程(矢量图如图8)图8 闭环矢量图矢量方程为:R1+R2=R3+R4将上述矢量方程分解为x和y方向,并分别对方程两边对时间t求两次导数得:r1_dot_dot+r2*α2*S2+r2*w2^2*C2=r3*α3*S3+r3*w3^2*C3 (12)r2*α2*C2-r2*w2^2*S2=r3*α3*C3-r3*w3^2*S3 (13)三)质心加速度的矢量方程F13x+F43x=-m3*Ac3x (9)F13y+F43y=-m3*Ac3y (10)F43x*r3*C3+F43y*r3*S3= I3*α3 (11)图9质心加速度的矢量示意图矢量关系:Ac3=Rc3_dot_dotAc4=R3_dot_dot+ Rc4_dot_dotAc2=R3_dot_dot+ R4_dot_dot+ Rc2_dot_dot (_dot_dot 表示对时间求两次导数)将上述三个矢量方程分别分解为x 和y 方向,则它们等效为以下六个方程;Ac3x=-rc3*w3^2*C3-rc3*α3*S3 (14) Ac3y=-rc3*w3^2*S3+rc3*α3*C3 (15) Ac4x=-r3*w3^2*C3-r3*α3*S3 (16) Ac4y=-r3*w3^2*S3+r3*α3*C3 (17) Ac2x=-r3*w3^2*C3-r3*α3*S3-rc2*w2^2*C2-rc2*α2*S2 (18) Ac2y=-r3*w3^2*S3+r3*α3*C3-rc2*w2^2*S2+rc2*α2*C2 (19) 力未知量为:F12x,F12y,F24x,F24y,F43x,F43y,F13x,F13y,Fy,Fm 引入的加速度有:α2,α3,r1_dot_dot ,Ac3x ,Ac3y ,Ac4x ,Ac4y ,Ac2x ,Ac2y三、系统方程的组装将所有19个方程组装成矩阵形式1010000000000200000010100000000002002222222200000020000000000101000000000000400001010000000000004000101000000000000010000000010010000000100000010000000000000010100000000m m rc S rc C rc S rc C I m m m ⋅⋅-⋅-⋅-----300000000101000000003000000333300003000000000000000002233100000000000000002233000000000000000002233010000000000000002233001000000000000000330001000000000000m m r C r S I r S r S r C r C rc S r S rc C r C rc S ⋅⋅-⋅-⋅⋅-⋅⋅⋅⋅⋅-⋅003300001000000000000033000001000000000000330001rc C r S r C ⎛⎫⎪ ⎪⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪⋅-⎪⋅ ⎪⎪ ⎪⋅-⎝⎭120120240240434301301300020333^2322^2222^2233^2322^222233441F x F y F x F y F x p F y F x F y Fy Fm r w C r w C r w S r w S rc w C Ac x Ac y Ac x Ac y Ac x Ac y r αα••⎛⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪- ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⨯= ⎪ ⎪ ⎪⋅⋅-⋅⋅ ⎪ ⎪⋅⋅-⋅⋅ ⎪-⋅⋅ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭33^2322^2233^2333^2333^2333^2333^23r w S rc w S r w S rc w C rc w S r w C r w S ⎛⎫ ⎪⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪-⋅⋅ ⎪⋅⋅+⋅⋅ ⎪ ⎪-⋅⋅ ⎪ ⎪⋅⋅ ⎪-⋅⋅ ⎪⎪ ⎪⋅⋅⎝⎭ 四、初始条件的设定假设图3位置就是初始位置。

MATLAB/Simulink与控制系统仿真实验报告姓名:喻彬彬学号:K031541725实验1、MATLAB/Simulink 仿真基础及控制系统模型的建立一、实验目的1、掌握MATLAB/Simulink 仿真的基本知识;2、熟练应用MATLAB 软件建立控制系统模型。
二、实验设备电脑一台;MATLAB 仿真软件一个三、实验内容1、熟悉MATLAB/Smulink 仿真软件。
2、一个单位负反馈二阶系统,其开环传递函数为210()3G s s s =+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
3、某控制系统的传递函数为()()()1()Y s G s X s G s =+,其中250()23s G s s s+=+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
4、一闭环系统结构如图所示,其中系统前向通道的传递函数为320.520()0.11220s G s s s s s+=+++,而且前向通道有一个[-0.2,0.5]的限幅环节,图中用N 表示,反馈通道的增益为1.5,系统为负反馈,阶跃输入经1.5倍的增益作用到系统。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
四、实验报告要求实验报告撰写应包括实验名称、实验内容、实验要求、实验步骤、实验结果及分析和实验体会。
五、实验思考题总结仿真模型构建及调试过程中的心得体会。
题1、(1)利用Simulink的Library窗口中的【File】→【New】,打开一个新的模型窗口。
(2)分别从信号源库(Sourse)、输出方式库(Sink)、数学运算库(Math)、连续系统库(Continuous)中,用鼠标把阶跃信号发生器(Step)、示波器(Scope)、传递函数(Transfern Fcn)和相加器(Sum)4个标准功能模块选中,并将其拖至模型窗口。
SIMULINK仿真方法简介SIMULINK是一个进行动态系统的建模、仿真和综合分析的集成软件包。
它可以处理的系统包括:线性、非线性系统;离散、连续及混合系统;单任务、多任务离散事件系统。
在SIMULINK提供的图形用户界面GUI上,只要进行鼠标的简单拖拉操作就可以构造出复杂的仿真模型。
它的外表以方框图形式呈现,且采用分层结构。
从建模角度,SIMULINK 既适用于自上而下的设计流程,又适用于自下而上的逆程设计。
从分析研究角度,这种SIMULINK模型不仅让用户知道具体环节的动态细节,而且能够让用户清晰的了解各器件、各子系统、各系统间的信息交换,掌握各部分的交互影响。
1. 应用SIMULINK的基本操作1)在MATLAB的命令窗运行指令simulink或点击命令窗口中的图标,便可以打开如图B1-2所示的SIMULINK模块库浏览器(Simulink Library Browser)。
图B1-2 SIMULINK库浏览器2)点击Source字库前的“+”号(或双击字库名),便可以得到各种信源模块,如图B1-3。
图B1-3 信源子库的模块3)点击“新建”图标,打开一个名为untitled的空白模型窗口,如图B1-4。
图B1-4 SIMULINK的新建模型窗口4)用鼠标指向所需的信号源(如阶跃信号Step),按下鼠标左键,把它拖至untitled窗,就生成一个阶跃信号的复制品。
,如图B1-5。
图B1-5模型创建中的模型窗口5)采用上述方法,将信宿库Sink中的示波器scope拷贝到模型窗口,把鼠标指向信源右侧的输出端,当光标变成十字符时,按住鼠标任意键,移向示波器的输入端,就完成了两个模块间的信号连接,如图B1-6。
图B1-6 创建模型完毕中的模型窗口6)进行仿真,双击示波器,打开示波器显示屏,如图1-7。
点击模型窗口中的“仿真启动”图标或点击simulink菜单下的start,仿真就开始了,就可以观测到阶跃信号的波形了,如图B1-7。
simulink 仿真原理Simulink是一种用于建立、仿真和分析动态系统的工具,它基于块图的图形化建模和仿真环境。
Simulink中的模型由各种块组成,每个块代表系统中的一个组件或子系统。
通过连接块之间的信号流,可以建立系统的完整模型。
在Simulink中,系统的行为可以用已知的数学和物理原理描述。
通过在块间定义输入和输出之间的关系,可以建立数值模型。
仿真过程可以提供系统的响应和行为,并用于验证模型的正确性。
Simulink提供了多种模型库,包括数学操作、信号处理、控制系统、电力系统等领域。
用户可以根据需要选择适当的块来构建他们的模型。
此外,Simulink还提供了丰富的仿真参数和分析工具,使用户可以对系统进行深入的研究和优化。
使用Simulink进行仿真的过程通常包括以下步骤:1. 建立模型:选择适当的块,并将它们连接在一起,以形成系统模型。
2. 定义输入信号:指定模型的输入信号,可以是常数、波形或来自外部数据源。
3. 配置模型参数:设置块和模型的参数,例如采样时间、模拟时间、仿真器选项等。
4. 运行仿真:开始仿真过程,并观察系统的响应和行为。
5. 分析和优化:使用Simulink提供的工具进行结果分析和系统优化。
6. 生成代码:将模型生成可嵌入系统或实时硬件的代码。
7. 验证和验证:使用实际数据对生成的代码进行验证,并验证系统的正确性。
Simulink的应用广泛,可以用于开发控制系统、信号处理算法、通信系统等各种领域。
通过图形化建模和仿真环境,Simulink大大简化了系统开发和测试的过程,提高了开发效率和质量。
同时,Simulink也与MATLAB密切集成,可以轻松地进行数据分析和可视化。
Simulink系统仿真课程设计一、课程目标知识目标:1. 学生能理解Simulink的基本原理和功能,掌握Simulink的常用模块及其使用方法。
2. 学生能运用Simulink构建数学模型,实现对动态系统的仿真和分析。
3. 学生能掌握Simulink与MATLAB的交互操作,实现数据传递和模型优化。
技能目标:1. 学生具备运用Simulink进行系统仿真的能力,能独立完成简单系统的建模和仿真。
2. 学生能通过Simulink对实际工程问题进行分析,提出解决方案,并验证其有效性。
3. 学生具备团队协作能力,能与他人合作完成复杂系统的仿真项目。
情感态度价值观目标:1. 学生对Simulink系统仿真产生兴趣,提高对工程学科的认识和热爱。
2. 学生在仿真实践中,培养严谨的科学态度和良好的工程素养。
3. 学生通过课程学习,增强解决实际问题的信心,形成积极向上的学习态度。
课程性质:本课程为实践性较强的学科,结合理论知识,培养学生运用Simulink进行系统仿真的能力。
学生特点:学生具备一定的MATLAB基础,对Simulink有一定了解,但实际操作能力较弱。
教学要求:注重理论与实践相结合,强化动手能力训练,培养学生解决实际问题的能力。
在教学过程中,关注学生的个体差异,因材施教,提高学生的综合素质。
通过课程学习,使学生能够独立完成系统仿真项目,并为后续相关课程打下坚实基础。
二、教学内容本课程教学内容主要包括以下几部分:1. Simulink基础操作与建模- 熟悉Simulink环境,掌握基本操作。
- 学习Simulink常用模块,如数学运算、信号处理、控制等模块。
- 结合教材章节,进行实际案例分析,让学生了解Simulink建模的基本过程。
2. 系统仿真与分析- 学习Simulink仿真参数设置,掌握仿真算法和步长设置。
- 利用Simulink对动态系统进行建模与仿真,分析系统性能。
- 结合实际案例,让学生通过仿真实验,掌握系统性能分析方法。