【操作系统教程】HITCS-第3章 程序的机器级表示Ⅰ:基础-part02
- 格式:pptx
- 大小:201.97 KB
- 文档页数:53
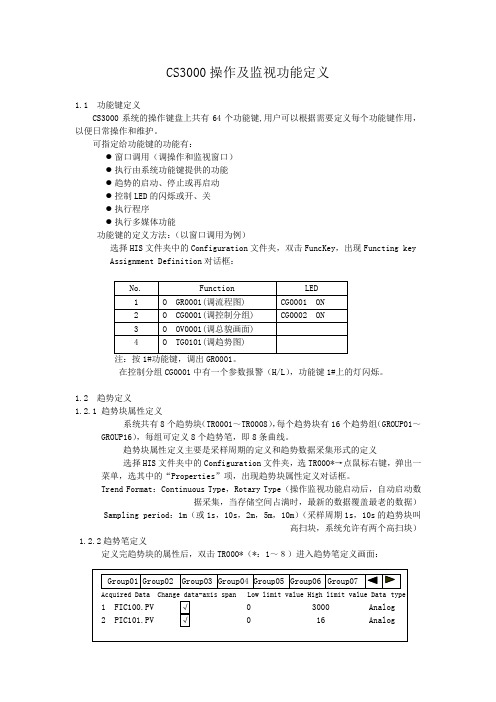
CS3000操作及监视功能定义1.1 功能键定义CS3000系统的操作键盘上共有64个功能键,用户可以根据需要定义每个功能键作用,以便日常操作和维护。
可指定给功能键的功能有:●窗口调用(调操作和监视窗口)●执行由系统功能键提供的功能●趋势的启动、停止或再启动●控制LED的闪烁或开、关●执行程序●执行多媒体功能功能键的定义方法:(以窗口调用为例)选择HIS文件夹中的Configuration文件夹,双击FuncKey,出现Functing key Assignment Definition对话框:注:按1#功能键,调出GR0001。
在控制分组CG0001中有一个参数报警(H/L),功能键1#上的灯闪烁。
1.2 趋势定义1.2.1 趋势块属性定义系统共有8个趋势块(TR0001~TR0008),每个趋势块有16个趋势组(GROUP01~GROUP16),每组可定义8个趋势笔,即8条曲线。
趋势块属性定义主要是采样周期的定义和趋势数据采集形式的定义选择HIS文件夹中的Configuration文件夹,选TR000*→点鼠标右键,弹出一菜单,选其中的“Properties”项,出现趋势块属性定义对话框。
Trend Format:Continuous Type,Rotary Type(操作监视功能启动后,自动启动数据采集,当存储空间占满时,最新的数据覆盖最老的数据)Sampling period:1m(或1s,10s,2m,5m,10m)(采样周期1s,10s的趋势块叫高扫块,系统允许有两个高扫块)1.2.2趋势笔定义定义完趋势块的属性后,双击TR000*(*:1~8)进入趋势笔定义画面:点Group01定义第一组的8个点;点Group02定义第二组的8个点;共16组128点。
趋势画面的调用名为:T G 0 1 1 6趋势块号趋势组号1.2.3Closing数据处理功能根据采集的趋势数据,Closing数据处理功能计算出一小时、一天、一月的平均值、累积值、最大值、最小值。

西门子802s/c系统操作篇(页面较大,图片较多,请耐心等待)SINUMERIK 802S/C base line 操作面板NC 键盘区(左侧):机床控制面板区域(右侧):1.1 屏幕划分符号说明屏幕中的缩略符分别具有如下含义:表 1-1 符号说明图中元素缩略符含义MA 加工PA 参数(1)当前操作区域程序PRDI 通讯DG 诊断STOP 程序停止(2)程序状态程序运行RUNRESET 程序复位表 1-1 符号说明(续)有效”。
PRT 程序测试(无指令给驱动)1_1000 INC 步进增量系统处于 JOG 运行方式时不显示程序控制而是显示所选择的步进增量。
开机和回参考点 2操作步骤第一步,接通 CNC 和机床电源。
系统引导以后进入“加工”操作区 JOG 运行方式。
出现“回参考点”窗口。
3 参数设定在 CNC 进行工作之前,必须通过参数的输入和修改对机床、刀具等进行调整:输入刀具参数及刀具补偿参数输入/修改零点偏置输入设定数据3.1输入刀具参数及刀具补偿参数—“参数”操作区功能刀具参数包括刀具几何参数、磨损量参数和刀具型号参数。
不同类型的刀具均有一个确定的参数数量。
每个刀具有一个刀具号(T 号)。
参见章节8.6“刀具和刀具补偿”。
参数设定软键选择接下去渐低的或渐高的刀沿号选择接下去渐低的或渐高的刀具号计算刀具长度补偿值用“扩展键”扩展软键功能所有的刀具补偿值复位为零建立一个新的刀沿,设立刀补参数。
新刀补建立到当前刀具上,并自动分配下一个刀沿号(D1-D9)。
在内存中最多可以建立 30 个刀沿删除一个刀具所有刀沿的刀补参数建立一个新刀具的刀具补偿参数。
注意:最多可以建立 15 个刀具。
打开一个对话窗口,显示设定的所有刀具号。
输入待搜索的刀具号,按“确认键”开始搜索。
刀具寻找到后打开刀具补偿窗口。
3.1.2刀具补偿参数刀具补偿分为刀具长度补偿和刀具半径补偿。
参数表结构因刀具类型不同而不同3.1。
3对刀确定刀具补偿值功能利用此功能可以计算刀具 T 未知的几何长度前提条件换入该刀具。
2023年初二班级安全的工作计划初二班级平安的工作安排1我是128班的班主任兼任课老师。
平安教化一切以健康为本,使学生们有良好的平安意识和自我防护实力,使学校的各项工作都能正常运作是每个任课老师的责任。
对于八年级的学生来说,他们正处在一个身心发展的重要阶段,他们的行为规范比起低年级的同学具有相对的独立性和广泛性,与学校、家庭以外的场所联系更为频繁,因此平安教化任务也必需更有针对性。
在依据我校、我班的实际状况学校平安工作会议精神,我班仔细实行,努力把我班平安工作做深、做实、做细,努力营造平安稳定的育人环境。
让学生放心、让家长放心、让社会放心。
同时根据学校领导提出的各项工作要求,制定出本班平安工作安排:这个年龄阶段的学生他们在行为上有自我的支配实力,自控实力又不强,简单被外面形式多样的消遣活动所诱惑。
因此,除了学校所提出的详细措施仔细落实外,依据这个年龄阶段的学生简单出现的一些平安隐患,重点落实好以下措施:1、监督好学生不到外面的网吧、嬉戏厅等消遣场所,在家上网的同学要让家长了解他们常上什么网站。
2、视察每个学生的行为规范,刚好发觉他们的异样行为,遇到有异样状况的学生,刚好了解、教化、并刚好与家长联系;3、与家长沟通,让家长限制学生的零花钱数额;4、每天严格登记考勤,遇到有旷课的同学,第一时间与家长取得联系,刚好了解他们旷课的缘由,在班主任没有课时,由班长负责,班长必需在第一时间把旷课的同学状况通知班主任,由班主任去了解缘由。
5、了解学生和校外人士的交际状况,不提倡与校外生疏人交往;6、不提倡学生私自组织外出旅游或者频繁地集体外出;杜绝学生私自到外游泳;7、向学生灌输一些体育活动必需留意的平安措施,比如:做些打算活动、铅球、篮球活动中应留意一些不规范的动作,以免出现不必要的损害。
8、杜绝学生带一些色情书刊或一些不健康的书籍、光盘。
9、依据聋生的特点,加强学生心理辅导,特殊是当学生受到挫折时该怎么办,同时怎样有效预防校内暴力、损害事故发生。


SIMATIC 工业软件编程和操作手册法律资讯警告提示系统为了您的人身安全以及避免财产损失,必须注意本手册中的提示。
人身安全的提示用一个警告三角表示,仅与财产损失有关的提示不带警告三角。
警告提示根据危险等级由高到低如下表示。
危险表示如果不采取相应的小心措施,将会导致死亡或者严重的人身伤害。
警告表示如果不采取相应的小心措施,可能导致死亡或者严重的人身伤害。
小心表示如果不采取相应的小心措施,可能导致轻微的人身伤害。
注意表示如果不采取相应的小心措施,可能导致财产损失。
当出现多个危险等级的情况下,每次总是使用最高等级的警告提示。
如果在某个警告提示中带有警告可能导致人身伤害的警告三角,则可能在该警告提示中另外还附带有可能导致财产损失的警告。
合格的专业人员本文件所属的产品/系统只允许由符合各项工作要求的合格人员进行操作。
其操作必须遵照各自附带的文件说明,特别是其中的安全及警告提示。
由于具备相关培训及经验,合格人员可以察觉本产品/系统的风险,并避免可能的危险。
按规定使用 Siemens 产品请注意下列说明:警告Siemens 产品只允许用于目录和相关技术文件中规定的使用情况。
如果要使用其他公司的产品和组件,必须得到 Siemens 推荐和允许。
正确的运输、储存、组装、装配、安装、调试、操作和维护是产品安全、正常运行的前提。
必须保证允许的环境条件。
必须注意相关文件中的提示。
商标所有带有标记符号 ® 的都是 Siemens AG 的注册商标。
本印刷品中的其他符号可能是一些其他商标。
若第三方出于自身目的使用这些商标,将侵害其所有者的权利。
责任免除我们已对印刷品中所述内容与硬件和软件的一致性作过检查。
然而不排除存在偏差的可能性,因此我们不保证印刷品中所述内容与硬件和软件完全一致。
印刷品中的数据都按规定经过检测,必要的修正值包含在下一版本中。
Siemens AG Digital Industries A5E33215622-AMⓅ 11/2022 本公司保留更改的权利Copyright © Siemens AG 2011 - 2022.保留所有权利重要事项本文档的用途本文档中的信息将在组态 (页 49)和编程 (页 116) SIMATIC Safety 故障安全系统方面为您提供支持。

三菱伺服说明书三菱伺服说明书篇一:三菱伺服报警代码三菱伺服说明书 MR-J2-B伺服放大器手册(英文)8 - 1 Alarm and warning lists 报警和警告名单When a fault occurs during operation, the corresponding alarm or warning is displayed. If any alarm or warning has occurred, refer to Section 8.2 or 8.3 and take the appropriate action.AlarmsWarnings:当故障发生在操作过程中,相应的报警或显示警告。
如果任何警报或警告发生,请参阅第8.2或8.3,并采取适当的行动。
报警警告Display Name 显示名称10 Undervoltage10欠压11 Board error 1 11 局错误112 Memory error13 Clock error15 Memory error 216 Encoder error 117 Board error 218 Board error 320 Encoder error 224 Ground fault25 Absolute position erase30 Regenerative error31 Overspeed32 Overcurrent33 Overvoltage34 CRC error35 Command F T error36 Transfer error37 Parameter error46 Servo motor overheat50 Overload 151 Overload 252 Error excessive8E RS-232C error88 Watchdog92 Open battery cable warning96 Zero setting errorE0 Excessive regenerative load warningE1 Overload warningE3 Absolute position counter warningE4 Parameter warningE6 Servo emergency stopE7 Controller emergency stopE9 Main circuit off warning12内存错误1 14时钟误差 15 内存错误2 16 编码器错误117局错误2 18局的错误3 20编码器错误2 24接地故障 25绝对位置擦除 3 0再生错误31超速32过流33过压保护 34 CRC错误 35指挥F t误差 36传输错误 37参数错误 46伺服电机过热 50超载1 51超载2 52错误过多 8E型的RS - 232错误88看门狗92打开电池电缆警告96零设定错误过度负荷的 E0再生警告E1超载警告E3展绝对位置计数器警告E4类参数警告E6伺服紧急停止 E7的紧急停止控制器 E9主回路关闭警告三菱伺服说明书篇二:最新三菱PLC编程最新手册三菱PLC 编程手册目录第一章 FX1N PLC编程简介1.1 FX1N PLC 简介 (1)1.1.1 FX1N PLC 的提出 (1)1.1.2 FX1N PLC 的特点 (1)1.1.3 FX1N PLC 产品举例 (1)1.1.4 关于本手册 (1)1.2 编程简介 (1)1.2.1 指令集简介 (2)1.2.2 资源集简介 (7)1.2.3 编程及应用简介 (9)第二章基本逻辑指令说明及应用2.1 基本逻辑指令一览表 (10)2.1 [LD],[LDI],[LDP],[LDF],[OUT,指令 (10)2.2.1 指令解说 (10)2.2.2 编程示例 (10)2.3[AND],[ANI],[ANDP],[NDF,指令 (11)2.3.1 指令解说 (11)2.3.2 编程示例 (12)2.4 [OR],[ORI],[ORP],[ORF,指令 (13)2.4.1 指令解说 (13)2.4.2 编程示例 (13)2.5 [ANB],[ORB,指令 (14)2.5.1 指令解说 (14)2.5.2 编程示例 (14)2.6 [INV,指令 (15)2.6.1 指令解说.............................. (15)2.6.2 编程示例 (15)2.7 [PLS],[PLF,指令 (16)2.7.1 指令解说 (16)2.7.2 编程示例 (17)2.8 [SET],[RST]指令 (17)2.8.1 指令解说 (17)2.8.2 编程示例 (18)2.9 [NOP],[END]指令 (18)2.9.1 指令解说 (18)2.9.2 编程示例 (18)2.10 [MPS],[MRD],[MPP] 指令 (18)2.10.1 指令解说 (18)2.10.2 编程示例 (19)2.11[MC],[MCR]指令 (21)2.11.1指令解说 (21)2.11.2 编程示例 (21)第三章步进顺控指令说明及应用3.1步进顺控指令说明 (22)3.1.1 指令解 (22)3.1.2 编程示例 (25)3.2 步进顺控指令应用 (25)3.2.1 单一流程示例 (25)3.2.2 选择性分支与汇合示例 (26)3.2.3 并行分支与汇合示例 (27)3.2.4 循环和跳转示例 (29)第四章功能指令说明及应用4.1 功能指令一览表 (31)4.2 程序流程 (33)4.2.1 条件跳转[CJ] (33)4.2.2 子程序调用[CALL] (35)4.2.3 子程序返回[SRET] (35)4.2.4 主程序结束[FEND] (36)4.2.5 循环范围开始,FOR] (37)4.2.6 循环范围结束「NEXT] (37)4.3 传送与比较 (38)4.3.1 比较指令[CMP] (39)4.3.2 区域比较,ZCP] (40)4.3.3 传送指令[MOV] (41)4.3.4 反向传送,CML] (43)4.3.5 BCD 转换,BCD] (44)4.3.6 BIN 转换,BIN] (45)4.4 四则逻辑运算 (46)4.4.1 BIN 加法运算[ADD] (46)4.4.2 BIN 减法运算[SUB] (47)4.4.3 BIN 乘法运算[MUL] (48)4.4.4 BIN 除法运算,DIV] (49)4.4.5 BIN 1 [INC]................................... .. (50)4.4.6 BIN 减1[DEC] (50)4.4.7 逻辑与[WAND] (51)4.4.8 逻辑或[WOR] (51)4.4.9 逻辑异或[WXOR] (52)4.4.10 求补,NEG] (53)4.4.11 BIN 开方运算[SQR] (53)4.5 循环与移位 (54)4.5.1 循环右移[ROR] (54)4.5.2 循环左移[ROL] (55)4.5.3带进位循环右移,RCR] .............................................. (56)4.5.4 带进位循环左移[RCL] (58)4.6 浮点数运算 (59)4.6.1 二进制浮点数比较「DECMP] (59)4.6.2二进制浮点数区域比较[DEZCP] (60)4.6.3 二进制浮点数转十进制浮点数[DEBCD] (61)4.6.3 十进制浮点数转二进制浮点数[DEBIN] (62)4.6.5 二进制浮点数加法[DEADD] (62)4.6.6 二进制浮点数减法[DESUB] (63)4.6.7 二进制浮点数乘法「DEMUL] (64)4.6.8 二进制浮点数除法「DEDIV] (65)4.6.9 二进制浮点数开方「DESQR] (66)4.6.10 二进制浮点数转BIN 整数变换「INT] (67)4.6.11 BIN 整数转二进制浮点数「FLT] (68)4.7 触点比较指令 (69)4.7.1 接点比较指令「LD※, (69)4.7.2 接点比较指令「AND※, (70)4.7.3接点比较指令「OR※, (72)4.8 功能指令的基本规则 (73)4.8.1 (功能指令的表示与执行形式................................ . (73)4.8.2 功能指令内的数值处理 (75)4.8.3 利用变址寄存器的操作数修改 (77)第五章资源说明及应用5.1变址寄存器V 、Z 说明及应用 (80)5.1.1 变址寄存器V 、Z 说明 (80)5.1.2 变址寄存器在梯形图中的应用 (80)5.1.3 使用变址功能的注意事项 (81)5.2 输入输出继电器X 、Y 说明及应用 (82)5.2.1 输入输出继电器X 、Y 说明 (82)5.2.2输入输出继电器应用 (83)5.3 辅助中间继电器M 说明及应用 (85)5.3.1 辅助中间继电器M 说明 (85)5.3.2 辅助中间继电器M 应用 (85)5.4 状杰继申器S 说明及应用 (87)5.4.1 状态继电器S 说明 (87)5.4.2 状态继电器S 应用 (88)5.5 定时器T 说明及应用 (88)5.5.1 定时器T 说明 (88)5.5.2 定时器T 应用...................................................905.6计数器C 说明及应用 (92)5.6.1 16 bit 计数器C 说明............................................925.6.2 32 bit 计数器C 说明............................................935.6.3 16 bit 计数器C 应用............................................955.6.4 32 bit 计数器应用 (96)5.7数据寄存器D 说明及应用 (97)5.7.1 数据寄存器D 说明...............................................975.7.2 数据寄存器D 应用...............................................995.8程序位置指针P 说明及应用 (100)5.8.1 程序位置指针P 说明 (100)5.8.2 程序位置指针P 应用 (100)5.9常数标记K 、H 详细说明 (102)5.9.1 常数标记K (102)5.9.2 常数标记H (103)5.10 特殊软元件说明 (103)第六章 PID指令说明及应用6.1 PID 运算 (104)6.1.1............................................................... ..1046.1.2 应用示例 (110)第一章FX1N PLC 编程简介1.1 FX1N PLC 简介1.1.1 FX1N PLC 的提出基于以下观点,提出FX1N PLC 的概念:? 、软件和硬件独立设计。
机器人操作系统开发教程与使用方法机器人操作系统(ROS)是一个开源的开发框架,旨在为机器人软件开发提供一个结构化的方法和工具集。
ROS广泛应用于机器人领域,可用于在各种硬件平台上开发复杂的机器人系统。
本文将介绍ROS的基本概念和核心功能,并提供一些使用方法。
一、ROS的基本概念1. 节点(Nodes): 节点是ROS的最小功能单元,可以是一个独立的程序,也可以是硬件设备的驱动程序。
节点通过发布(Publishing)和订阅(Subscribing)消息来与其他节点通信。
2. 节点图(Graph): 节点图是ROS系统中所有节点及其相互通信关系的可视化表示。
节点之间的消息传递通过话题(Topics)和服务(Services)进行。
3. 话题(Topics): 话题是ROS中消息传递的一种方式,用于发布和订阅消息。
发布者(Publisher)将消息发布到一个话题上,订阅者(Subscriber)从该话题接收消息。
4. 服务(Services): 服务是ROS中一种用于请求和响应的消息传递机制。
服务请求者(Client)向服务提供者(Server)发送请求消息,并等待响应消息。
5. 节点参数(Parameters): 节点参数是ROS中用于配置节点行为的设置。
节点可以读取、设置和修改参数,以实现动态的运行时配置。
二、ROS的核心功能1. 消息传递:ROS提供了一种基于话题的消息传递机制,可以实现节点之间的异步通信。
通过定义自定义消息类型,可以在不同的节点之间传递复杂的数据。
2. 消息记录与回放:ROS记录所有发布到话题的消息,可以将其保存为日志文件以供后续回放。
这对于调试和分析机器人系统的行为非常有用。
3. 模块化开发:ROS鼓励模块化开发,允许将机器人系统划分为多个独立的节点。
这种模块化的设计使得软件复用和维护更加容易。
4. 传感器集成:ROS提供了许多用于传感器数据的处理和集成库。
可以通过这些库来处理图像、激光雷达、惯性测量单元(IMU)等传感器数据。
第1章 BASIC语言的特点及运行环境 (1)1.1 BASIC语官的发展与版本简介 (1)1.2 GWBASIC语言的特点 (1)1.3 GWBASIC的运行环境 (1)1.4 GWBASIC的启动 (2)1.5 BASIC的使用方式 (2)1.5.1 直接方式 (3)1.5.2 间接方式 (3)1.5.3 BASIC的退出 (3)第2章 BASIC的词法规则 (4)2.1 BASIC字符集 (4)2.2 BASIC保留字 (4)2.3 BASIC常数 (6)2.3.1 数值常数 (6)2.3.2 字符常数 (7)2.3.3 逻辑常数 (7)2.4 变量 (7)2.4.1 变量的类型 (7)2.4.2 变量的命名规则 (7)2.4.3 变量类型的说明 (7)2.5 下标变量 (8)2.5.1 数组 (8)2.5.2 下标变量 (9)2.5.3 下标变量的有关规定 (10)2.6 BASIC函数 (10)2.6.1 内部函数 (10)2.6.2 自定义函数 (15)2.7 运算符与表达式 (16)2.7.1 算术表达式 (16)2.7.2 关系表达式 (17)2.7.3 逻辑表达式 (17)2.7.4 复合逻辑表达式的运算顺序 (19)2.7.5 字符串表达式 (19)第3章 BASIC的程序结构 (21)3.1 BASIC语句和命令 (21)3.1.1 BASIC语句 (21)3.1.2 BASIC命令 (21)3.2 BASIC程序结构 (22)第4章 BASIC输入和输出 (23)4.1 输入数据的语句 (23)4.1.1 LET语句 (23)4.1.2 INPUT语句 (23)4.1.3 READ语句 (24)4.1.4 DATA语句 (24)4.1.5 RESTORE语句 (25)4.1.6 LINE INPUT语句 (25)4.1.7 SWAP语句 (26)4.2 输出语句 (26)4.2.1 PRINT语句 (26)4.2.2 PRINT USING语句 (27)4.2.3 LPRINT语句 (28)4.2.4 LPRINT USING语句 (28)4.3 输入、输出的辅助函数及变量 (29)4.3.1 TAB函数 (29)4.3.2 SPC函数 (29)4.3.3 LPOS函数 (29)4.3.4 INPUT$函数 (29)4.3.5 INKEY$变量 (30)4.4 提供系统日期和时间的语句和变量 (30)4.4.1 TIME$语句 (30)4.4.2 TIME$变量 (30)4.4.3 DATE$语句 (30)4.4.4 DATE$变量 (31)第5章 控制语句 (32)5.1 无条件控制转移语句 (32)5.1.1 GOTO语句 (32)5.1.2 GOSUB语句 (32)5.2 有条件转移语句 (33)5.2.1 IF语句 (33)5.2.2 ON n GOTO语句 (34)5.2.3 ON n GOSUB语句 (34)5.2.4 ON ERROR GOTO语句及相关变量 (34)5.2.5 ON KEY(n)GOSUB语句 (36)5.2.6 ON PLAY(n) GOSUB语句 (36)5.2.7 ON TIMER(n) GOSUB语句 (37)5.2.8 ON COM(n) GOSUB语句 (37)5.2.9 光笔控制语句与函数 (38)5.2.10 游戏杆操作的控制语句及函数 (38)5.3 循环控制 (39)5.3.1 FOR...NEXT语句 (39)5.3.2 WHILE...WEND语句. (41)第6章 数据文件及操作 (42)6.1 BASIC数据文件的有关概念 (42)6.1.1 数据文件的命名规则 (42)6.1.2 数据文件的分类 (43)6.2 顺序数据文件的建立和输入、输出 (43)6.2.1 顺序数据文件的打开和关闭 (43)6.2.2 顺序文件的输入和输出 (44)6.3 随机文件的建立和输入、输出 (46)6.3.1 随机文件的打开和关闭 (46)6.3.2 类型转换函数 (47)6.3.3 随机文件的输出有关语句 (48)6.3.4 随机文件的输入语句及转换函数 (48)第7章 BASIC绘图 (50)7.1 绘图环境的设置 (50)7.1.1 彩色图形显示器的工作模式 (50)7.1.2 显示器工作模式的选择语句 (51)7.1.3 绘图环境设置的其他语句 (53)7.2 绘图语句及相关函数 (54)7.2.1 画点、擦点语句 (54)7.2.2 画线语句 (55)7.2.3 画圆、圆弧及填充语句 (57)7.3 窗口与视口设置 (58)7.3.1 WINDOW语句 (58)7.3.2 VIEW语句 (59)7.4 动画设计语句及函数 (59)7.4.1 字符动画函数和变量 (59)7.4.2 图形模式下的动画设计语句和函数 (60)7.5 DXY-880A绘图仪BASIC命令 (61)7.5.1 DXY-880A绘图仪的联机方式 (61)7.5.2 DXY绘图命令 (62)第8章 GWBASIC的特殊语句及函数 (67)8.1 BASIC通信 (67)8.1.1 通信文件的打开与关闭 (67)8.1.2 通信文件的输入与输出 (68)8.2 机器级语句及函数 (68)8.2.1 机器级基本语句及函数 (68)8.2.2 机器语言子程序的调用 (71)8.3 其他语句 (71)8.3.1 CHAIN语句 (71)8.3.2 COMMON语句 (72)第9章 BASIC命令与键盘操作 (73)9.1 编辑命令 (73)9.1.1 AUTO命令 (73)9.1.2 RENUM命令 (73)9.1.3 DELETE命令 (73)9.1.4 EDIT命令 (74)9.1.5 LIST命令 (74)9.1.6 LLIST命令 (74)9.1.7 NEW命令 (74)9.2 文件的管理与操作命令 、 (75)9.2.1 FILES命令 (75)9.2.2 LOAD命令 (75)9.2.3 SAVE命令 (75)9.2.4 BSAVE命令 (75)9.2.5 BLOAD命令 (76)9.2.6 KILL命令 (76)9.2.7 NAME命令 (76)9.2.8 MERGE命令 (76)9.2.9 目录管理命令 (77)9.3 程序的执行命令 (77)9.3.1 RUN命令 (77)9.3.2 CLEAR命令 (78)9.3.3 RESET命令 (78)9.3.4 SYSTEM命令 (78)9.3.5 程序追踪命令 (78)9.3.6 CONT命令 (79)9.4 BASIC屏幕编辑键 (79)9.5 BASIC功能键的定义及使用 (80)9.5.1 命令功能键的定义及使用 (80)9.5.2 语句功能键 (80)第10章 编译BASIC (82)10.1 编译BASIC的构成 (82)10.2 编译BASIC的使用 (82)10.2.1 源程序编译 (82)10.2.2 目标程序的连接 (84)10.2.3 程序的执行 (84)10.3 编译BASIC与解释BASIC的主要区别 (84)10.3.1 操作命令的区别 (84)10.3.2 说明语句的区别 (85)附录A GWBASIC命令、语句和函数索引 (86)附录B ASCII字符代码表 (92)附录C GWBASIC错误信息 (97)附录D GWBASIC专用键 (103)第1章 BASIC语言的特点及运行环境1.1 BASIC语官的发展与版本简介BASIC语言是国际上通用的计算机语言之一,各种规模的计算机系统均配有BASlC语言。
HITsz操作系统笔记这是 HITsz 操作系统笔记,,希望对你有帮助博客园显⽰图⽚异常计算机系统概述整理⾃《王道》操作系统基本概念操作系统定义:操作系统是指控制和管理整个计算机系统的硬件与软件资源,合理地组织、调度计算机的⼯作与资源的分配,进⽽为⽤户和其他软件提供⽅便接⼝与环境的程序集合。
操作系统是计算机系统中最基本的系统软件。
操作系统的基本特征:并发:并发是指两个或多个事件在同⼀时间间隔内发⽣。
操作系统的并发性是指计算机系统中同时存在多个运⾏的程序,因此它具有处理和调度多个程序同时执⾏的能⼒。
引⼊进程的⽬的是使程序能并发执⾏。
注意同⼀时间间隔(并发)和同⼀时刻(并⾏)的区别:并发:在多道程序环境下,⼀段时间内,宏观上有多道程序在同时执⾏。
⽽在每个时刻,单处理机环境下实际仅能有⼀道程序执⾏。
因此微观上这些程序仍是分时交替执⾏的。
操作系统的并发性是通过分时得以实现的。
并⾏:并⾏性是指系统具有同时进⾏运算或操作的特性,在同⼀时刻能完成两种或两种以上的⼯作。
并⾏性需要有相关硬件的⽀持,如多流⽔线或多处理机硬件环境。
共享:共享是指系统中的资源可供内存中多个并发执⾏的进程共同使⽤,分为两类:互斥共享⽅式:仅当进程 A 访问完并释放该资源后,才允许另⼀个进程 B 对该资源进⾏访问。
即在⼀段时间内只允许⼀个进程访问该资源,这种资源称为临界资源或独占资源。
同时访问⽅式:宏观上在⼀段时间内允许多个进程「同时」访问某些资源,微观上「轮流」(交替)访问。
同时访问的典型资源是磁盘设备。
操作系统最基本的特征是并发和共享,两者互为存在条件。
虚拟:虚拟是指把⼀个物理上的实体变为若⼲逻辑上的对应物,有以下应⽤:时分复⽤技术:虚拟处理器技术是通过多道程序设计技术,采⽤让多道程序并发执⾏的⽅法,来分时使⽤⼀个处理器的。
空分复⽤技术:虚拟存储器技术将⼀台机器的物理存储器变为虚拟存储器,以便从逻辑上扩充存储器的容量。
异步:多道程序环境允许多个程序并发执⾏,但由于资源有限(资源竞争),进程的执⾏以不可预知的速度向前推进,这就是进程的异步性。