陀螺经纬仪工作原理
- 格式:docx
- 大小:36.42 KB
- 文档页数:1

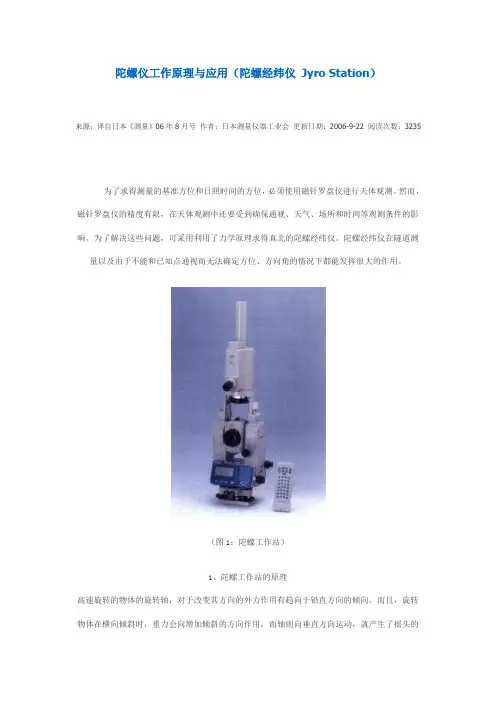
陀螺仪工作原理与应用(陀螺经纬仪Jyro Station)来源:译自日本《测量》06年8月号作者:日本测量仪器工业会更新日期:2006-9-22 阅读次数:3235为了求得测量的基准方位和日照时间的方位,必须使用磁针罗盘仪进行天体观测。
然而,磁针罗盘仪的精度有限,在天体观测中还要受到确保通视、天气、场所和时间等观测条件的影响。
为了解决这些问题,可采用利用了力学原理求得真北的陀螺经纬仪。
陀螺经纬仪在隧道测量以及由于不能和已知点通视而无法确定方位、方向角的情况下都能发挥很大的作用。
(图1:陀螺工作站)1、陀螺工作站的原理高速旋转的物体的旋转轴,对于改变其方向的外力作用有趋向于铅直方向的倾向。
而且,旋转物体在横向倾斜时,重力会向增加倾斜的方向作用,而轴则向垂直方向运动,就产生了摇头的运动(岁差运动)。
当陀螺经纬仪的陀螺旋转轴以水平轴旋转时,由于地球的旋转而受到铅直方向旋转力,陀螺的旋转体向水平面内的子午线方向产生岁差运动。
当轴平行于子午线而静止时可加以应用。
2、陀螺工作站的构造(图4:陀螺经纬仪的构造 0点调整螺丝,吊线,照明灯,陀螺转子、指针、供电用馈线、反射镜、陀螺马达、刻度线、目镜)。
陀螺经纬仪的陀螺装置由陀螺部分和电源部分组成。
此陀螺装置与全站仪结合而成。
陀螺本体在装置内用丝线吊起使旋转轴处于水平。
当陀螺旋转时,由于地球的自转,旋转轴在水平面内以真北为中心产生缓慢的岁差运动。
旋转轴的方向由装置外的目镜可以进行观测,陀螺指针的振动中心方向指向真北。
利用陀螺经纬仪的真北测定方法有“追尾测定”和“时间测定”等。
追尾测定[反转法]利用全站仪的水平微动螺丝对陀螺经纬仪显示岁差运动的刻度盘进行追尾。
在震动方向反转的点上(此时运动停止)读取水平角。
如此继续测定之,求得其平均震动的中心角。
用此方法进行20分钟的观测可以求得+/-0。
5分的真北方向。
时间测定[通过法]用追尾测定观测真北方向后,陀螺经纬仪指向了真北方向,其指针由于岁差运动而左右摆动。

简述陀螺经纬仪定向的主要内容
陀螺经纬仪定向是指使用陀螺经纬仪来定位和导航时,对载体位置、航向、航速等进行定向的一种技术。
这种技术由三部分组成:陀螺经纬仪、信号处理器和定位数据库。
一、陀螺经纬仪
陀螺经纬仪(gyroscopic compasses)是一种采用陀螺仪原理的测量仪器,它能够测出地球自转和航行距离。
它的主要原理是:假设地球的自转旋转方向不变,空间内的惯性外框与地球的外框是一致的,那么只需要知道航行距离就可以测量出地球的旋转角度。
陀螺经纬仪由一组大型陀螺仪和支架组成,可以测量地球自转的旋转角度。
二、信号处理器
陀螺经纬仪的信号处理器是解算陀螺经纬仪测量出的地球自转
角度,并将其转换成地球表面上航行对应的航向方位和航行距离,以及航行者在地球表面上的经纬度位置。
三、定位数据库
定位数据库提供了载体在地球表面上定位时,所需要的地理信息,包括航行者所在地点经纬度、海拔高度、地形、气候等。
定位数据库中的信息是通过GPS和地形测量技术来收集的,可以提供精确的定位信息,这些信息的汇总就是定位数据库。
以上就是陀螺经纬仪定向的主要内容。
陀螺经纬仪定向主要依靠陀螺经纬仪、信号处理器以及定位数据库等来实现载体定位、航向定位和航行距离测量。
陀螺经纬仪定向技术已经广泛应用于航空、商业
航行、军事行动及旅游导游等方面,在实现人与机器的协同智能定位方面发挥着重要作用。
力学基础陀螺仪是利用高速旋转体的旋转轴能够指示方向的特征而制作的。
为了说明和掌握陀螺仪的基本原理,这里介绍几个有关力学的概念。
1. 矢量描述一个转动的物体在空间转动的状况,常以旋转轴,旋转方向和旋转的角速度三个要素来表示。
图1-4所示原盘转轴的位置在圆心o 点上,转轴的方向和盘面垂直。
转动的方向如盘上箭头所示。
转动的角速度为每秒若干周,为了运算方便,常用一个矢量来表示,这个矢量的方向和轴线一致,如果用右手的四指表示转东方,那么右手拇指就代表矢量的方向,这个矢量模就是转速的大小,可按一定的比例尺订出来,矢量所在直线就是转动轴线,箭头表示回转方向。
2. 刚体的角速度和角加速度在外力的作用下物体不改变其大小和形状,即组成物体的任意两个质点间的距离不因外力而改变,此物体称为刚体。
刚体作转动时,在某一段时间内的角位移和时间的比值,称为刚体对转轴的得角速度 dt d αω=式中α为角位移,ω的单位为 rad/s刚体作转动时,角速度增量和时间的比值称为刚体对转轴的角加速度。
22dtd dt d αωε== ε的单位为rad/s 2.3.力矩M绕定轴转动的刚体,如果不受外力的作用,则将静止不动或以恒定的角速度不停的转动。
外力的刚体转动的影响不仅跟力的大小有关,而且还跟力的作用点的位置和力的方向有关。
如施于刚体的力的作用线没有接触转轴,则该力可使刚体转动,这种使刚体转动得的作用叫做力矩。
力矩是改变刚体转动状态的外部原因。
外力p 在垂直于转轴o 的平面内,力对转轴的力矩为:M=pl=prcos θ式中 l —力臂,即力的作用线和转轴间的垂直距离r —p 的作用点到转轴的距离力与力臂的乘积成为力对转轴的的力矩。
力矩不仅有大小,还有方向,一般以沿转轴的矢量来表示,该矢量垂直于r 和p 所在的平面,其方向与转向有关。
习惯上用伸直得右手拇指表示力矩矢的方向,右手的其余四指弯曲,弯曲的方向表示转向。
4.转动惯性I转动惯量反映刚体对于转动的惯性,它是刚体在转动时惯性的变量。

一、实习目的本次实习旨在使学生了解陀螺经纬仪定向的基本原理、操作方法及注意事项,提高学生实际操作能力,掌握陀螺经纬仪定向技术在工程测量中的应用。
二、实习时间与地点实习时间:2023年11月15日实习地点:XX工程测量实验室三、实习内容1. 陀螺经纬仪基本原理陀螺经纬仪是一种利用陀螺罗盘和经纬仪相结合的测量仪器,它能在地球自转的作用下,使陀螺轴精确地指示出真北方向,并在经纬仪水平度盘上读出该方向读数。
陀螺经纬仪定向技术具有精度高、速度快、不受地形、气候及外界磁场影响等优点。
2. 陀螺经纬仪操作方法(1)仪器组装:将陀螺仪、经纬仪、三脚架等部件组装成完整的陀螺经纬仪。
(2)仪器安置:将陀螺经纬仪安置在测站上,确保仪器稳定。
(3)对中:调整三脚架,使仪器中心与测站点重合。
(4)整平:调整仪器,使仪器水平。
(5)瞄准:瞄准目标点,调整瞄准器,确保瞄准准确。
(6)读数:读取经纬仪水平度盘上的读数。
(7)记录:将观测数据记录在实习报告上。
3. 陀螺经纬仪定向实验(1)实验目的:通过实验,掌握陀螺经纬仪定向操作方法,验证定向精度。
(2)实验步骤:1)在测站上安置陀螺经纬仪,进行对中和整平。
2)瞄准目标点,读取经纬仪水平度盘上的读数。
3)重复步骤2,进行多组观测。
4)计算定向方位角,并与理论值进行比较。
(3)实验结果与分析:通过实验,我们得到了以下结果:1)定向方位角平均值为X°Y′Z″,与理论值X°Y′Z″基本一致。
2)定向精度满足工程要求。
四、实习体会1. 陀螺经纬仪定向技术具有精度高、速度快、不受地形、气候及外界磁场影响等优点,在工程测量中具有广泛的应用前景。
2. 通过本次实习,我们掌握了陀螺经纬仪定向操作方法,提高了实际操作能力。
3. 在实习过程中,我们应注重以下几点:(1)仪器组装要规范,确保仪器性能。
(2)对中和整平要精确,提高定向精度。
(3)瞄准要准确,避免误差。
(4)记录要完整,便于后续数据处理。
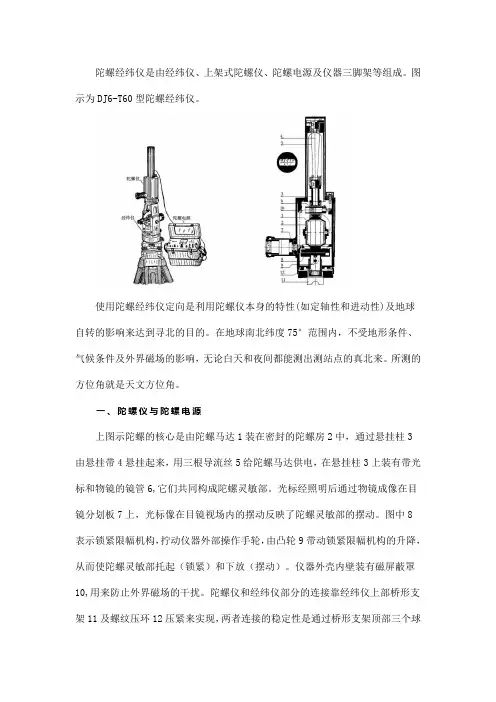
陀螺经纬仪是由经纬仪、上架式陀螺仪、陀螺电源及仪器三脚架等组成。
图示为DJ6-T60型陀螺经纬仪。
使用陀螺经纬仪定向是利用陀螺仪本身的特性(如定轴性和进动性)及地球自转的影响来达到寻北的目的。
在地球南北纬度75°范围内,不受地形条件、气候条件及外界磁场的影响,无论白天和夜间都能测出测站点的真北来。
所测的方位角就是天文方位角。
一、陀螺仪与陀螺电源上图示陀螺的核心是由陀螺马达1装在密封的陀螺房2中,通过悬挂柱3由悬挂带4悬挂起来,用三根导流丝5给陀螺马达供电,在悬挂柱3上装有带光标和物镜的镜管6,它们共同构成陀螺灵敏部。
光标经照明后通过物镜成像在目镜分划板7上,光标像在目镜视场内的摆动反映了陀螺灵敏部的摆动。
图中8表示锁紧限幅机构,拧动仪器外部操作手轮,由凸轮9带动锁紧限幅机构的升降,从而使陀螺灵敏部托起(锁紧)和下放(摆动)。
仪器外壳内壁装有磁屏蔽罩10,用来防止外界磁场的干扰。
陀螺仪和经纬仪部分的连接靠经纬仪上部桥形支架11及螺纹压环12压紧来实现,两者连接的稳定性是通过桥形支架顶部三个球形顶尖插入陀螺仪底部三条向心“V”形槽来达到强制归心。
陀螺电源是一个直流的晶体管电子设备,总体分为两层。
下层是蓄电池箱,内装两组镣镉密封蓄电池,并联使用,端部装有输出插座。
上层是逆变器,使用时由专用导线和蓄电池箱连接,逆变器面板上设有操作指示机构。
二、观测方法(一)粗定向在待定测站上安置陀螺经纬仪,望远镜在盘左位置,并大致对向北方,先进行粗定向。
1.两个逆转点法起动陀螺,当电源逆变器电压为36V时,陀螺达到额定转速。
旋转陀螺仪操作手轮,下放陀螺灵敏部,松开经纬仪水平制动螺旋,用手转动照准部进行跟踪。
所谓跟踪,就是通过陀螺仪目镜观察,使视场上移动着的光标像与分划板的零刻线随时重合,当接近逆转点时,光标移动速度慢下来,此时制动照准部,用水平微动螺旋继续跟踪,直达逆转点时读出水平度盘读数u1'。
松开制动螺旋,继续向反向跟踪,直达另一逆转点,读出u2’。
目次1 陀螺及其特性 (11.1陀螺 (11.2摆式陀螺仪 (11.3陀螺仪的基本特性 (11.4摆式陀螺仪寻北原理 (21.5积分式陀螺经纬仪的定向原理 (52Y/JTG-1陀螺经纬仪的主要结构 (62.1总体构成 (62.2主要技术指标 (72.3Y/JTG-1A型积分式陀螺经纬仪工作流程 (8 2.4陀螺仪的机械结构及光学系统 (82.5自动积分及测量控制电路 (113定向测量作业程序 (133.1测前准备 (133.2仪器各功能选择 (133.3方位角的测量 (134作业中的注意事项 (145仪器参数的设臵 (155.1自摆周期和启动不跟踪周期的测定 (155.2仪器常数C的标定 (155.3时间设臵 (166仪器的一般调校 (166.1管状水准器的调校 (166.2陀螺灵敏部悬带扭力零位的调校 (166.3激光对点器的调校 (177陀螺经纬仪的维护与保养 (171 陀螺及其特性1.1陀螺凡是绕定点高速旋转的物体,或绕自身轴高速旋转的任意刚体,都称为陀螺。
如图1-1所示,设刚体上有一等效的方向支点O。
以O为原点,作固定在刚体上的动坐标系O-XYZ。
刚体绕此支点转动的角速度在动坐标轴上的分量分别为ωx、ωy、ωz,若能满足以下条件:ωz>>ωωzωz≈(1-1 OZ后者称为进动运动。
1.2摆式陀螺仪摆式陀螺仪如图1-3O下移到O′G的作用,而永远趋仪具有两个完全的自由度和一个不完全的自由度,故也称为二个半自由度陀螺仪。
1-陀螺转子2-内平衡环3-外平衡环4-底座图1-2 三自由度陀螺悬挂装臵图图1-3 变自由陀螺仪为摆式陀螺仪1.3陀螺仪的基本特性陀螺仪有两个非常重要的特性,即定轴性和进动性。
对于由高速转子组成的陀螺仪来说,不管它们的用途如何不同,结构上如何变化,它们都是按照陀螺的这两个基本特性来工作的。
为了说明自由陀螺仪的两个特性,可用如图1-4所示的实验仪器做一个实验。
首先,把衡重A移至使杠杆达到静平衡的位臵上,然后使陀螺高速旋转,这时看到陀螺旋转轴的空间方向始终保持不变,图中指向左边。
陀螺罗经的工作原理陀螺罗经,也被称为转轮罗经,是一种古老的精密仪器,它被用来测量海洋中的指南针方位、经纬度和地磁强度。
它几乎可以说是现代航海技术的开端。
那么,陀螺罗经是如何运行的呢?首先,陀螺罗经的工作原理基于物理学的一般原理,也就是“物体施加外力时会进行自转的运动”,这也就是物体自转的原理。
在陀螺罗经中,外力可以是引力、磁力、涡流或流体力等,这些外力会引起陀螺罗经内部的“重力梁”和“磁力力矩”的动作,这样,陀螺罗经就自动开始旋转,从而测量出海洋中的指南针方位、经纬度和地磁强度。
在陀螺罗经的结构中,表面有一个梯形的重力梁,它是由三个相互垂直的支撑形成的,它们之间的间隙可以改变,也就是说它们可以在重力的作用下移动,而且这种移动是有一定规律的。
通过改变间隙,重力梁就会发生偏转,产生相应的力矩,使陀螺罗经能按照一定的规律旋转。
在此拉力的作用下,陀螺罗经可以按照顺时针或逆时针的方向旋转,这种旋转的运动是可以持续的,因此,它能按照一定的规律测量海洋中的指南针方位、经纬度和地磁强度。
此外,陀螺罗经还可以通过磁力力矩来进行测量,原理与前述基于重力梁运动的原理类似,只是在这种情况下,磁力梁就是陀螺罗经的磁力力矩,它是由一个由金属片组成的旋转轴组成,这个轴可以受到外界磁场的影响,当该轴受到磁场的作用时,它就会旋转,产生力矩,引起陀螺罗经的旋转,从而测量出海洋中的指南针方位、经纬度和地磁强度。
由于陀螺罗经内部有重力力矩和磁力力矩的作用,所以,陀螺罗经能够按照一定的规律运行,不受外界条件的影响,这样就能够准确测量出各种复杂的海洋方位和经纬度。
另外,陀螺罗经的精度很高,它所测量出的结果准确可靠,而且操作简单,能在复杂的海洋环境中运行。
由此可见,陀螺罗经的原理和结构极其复杂,但它的使用却非常的方便,也被用来帮助航海家及其他海洋研究者准确的确定航行的方位和位置,并为现代航海技术的发展做出了重大的贡献。
第九章陀螺经纬仪陀螺经纬仪是将陀螺仪和经纬仪结合在一起的仪器,它可以在地理南北纬度75。
范围内,不受地形、气候以及外界磁场条件的影响,无论白天或者夜间都能迅速地测量出测站点的真北方向,对任何一目标均可测定陀螺方位角。
其主要用途分为:(1)矿井下每一方向边的地理方位;(2)通过加测导线边的陀螺方位来控制导线测量方向误差的积累;(3)矿山及地下工程,大型巷道的贯通定向;(4)隐蔽地区线路、管道、隧道等工程定向;(5)与激光测距仪配合使用,可用极坐标法测定新点的坐标。
第一节陀螺经纬仪的工作原理及JT15型的结构一、工作原理的陀螺经纬仪的核心部件是一个能以很高的速度旋转的转子。
陀螺转子有两个特征:⑴在没有外力矩作用下,陀螺转轴在宇宙空间中的方位保持不变,即定轴性。
(2)陀螺轴在外力作用时,陀螺轴的方位将发生变化。
这种效应称为“进动”,即所谓的进动性。
陀螺的两个特性可通过实验来说明,图9—1为一实验用的杠杆陀螺仪,当衡重G使杠杆达到静平衡时,陀螺的转子旋转后其转轴的方位保持不变,这就是陀螺的特性之一。
当陀螺静止时,如果衡重G向左移动一段距离,杠杆在重力的作用下,左端下降,右端上升,在竖直面产生逆时针方向的转动;但陀螺在高速转动时,杠杆就不会发生上下倾斜,图实脸用杠杆陀螺仪而保持水平,且在水平面作图9—1实验用杠杆陀螺仪逆时针方向的转动。
如果将G向右移动一段小距离,则杠杆在水平面作顺时针方向转动,这就是陀螺的第二个特性。
当陀螺仪被悬吊在地球某一位置时,陀螺轴Ox的x端位于该子午面之东,众所周知,由于地球自西向东的自转,地平面降落后,Ox轴的x端相对地平面上升。
如图9—2(b)所示,当地球转动0角时,Ox轴相对地面亦抬高0角。
陀螺重心不与悬挂点重合。
由于重力作用形成一个力矩M,使Ox轴向地球旋转方向(子午面)进动。
又由于地球不停地旋转,力矩M 始终是存在的,Ox 轴由东向西进动至子午面后,将越过子午面继续向西进动,此时的z端位于该子午面之西,Ox轴相对地球旋转来说,由抬升变为倾斜。
陀螺经纬仪工作原理
陀螺经纬仪是一种使用陀螺仪原理来测量方向和角度的仪器。
其工作原理如下:
1. 陀螺仪原理:陀螺仪是基于刚体运动学的原理。
当陀螺在一个力作用下旋转时,其角动量会保持不变。
利用这个原理,陀螺经纬仪可以通过测量陀螺转动时的角度和速度来确定物体的方向和角度。
2. 基本组成:陀螺经纬仪通常由一个陀螺仪和陀螺仪支架组成。
陀螺仪支架负责固定陀螺仪并提供支撑。
3. 工作过程:当陀螺经纬仪静止时,陀螺仪的转动轴指向地球的北极。
当陀螺经纬仪转动或受到外部扰动时,陀螺仪的转动轴会发生变化。
陀螺仪会通过检测自身的角度和速度来确定变化的方向和角度。
4. 输出信号:陀螺经纬仪会将测量到的方向和角度转换为电信号输出。
这些信号可以用来控制导航系统、飞行器或其他需要精确定位和导航的设备。
总的来说,陀螺经纬仪利用陀螺仪原理测量物体的方向和角度。
通过检测陀螺仪的角度和速度变化,可以确定物体的方向和角度,并将这些信息转换为电信号输出。