附合导线坐标差平差法
- 格式:pdf
- 大小:148.02 KB
- 文档页数:4
附合导线平差步骤一、数据处理1.数据输入:将测站、观测角度、观测距离等原始数据输入计算机或平差软件。
2.数据质检:对输入的数据进行初步的质检,检查是否存在错误数据、异常数据等,发现并剔除异常数据。
3.角度数据处理:将观测角度转换为弧度,便于后续计算。
4.距离数据处理:对观测距离进行单位转换,通常将其转换为米或千米。
5.数据配对:将同一测站观测到的角度和距离数据做配对,构成观测组。
6.编点编号:对测站进行编号,便于后续计算。
二、导线控制要素计算1.导线连杆长度计算:根据测站坐标计算导线连杆的几何长度。
2.导线初始点坐标计算:根据导线方位角、连杆长度和已知控制点的坐标计算导线初始点的坐标。
3.导线朝向角计算:根据已知控制点的坐标和导线的方位角,计算导线的朝向角。
三、平差计算1.平差模型确定:选择适当的平差模型,常用的有单位权平差模型、具有不等权的平差模型等。
2.条件方程建立:根据平差模型和导线控制要素的计算结果,建立条件方程组。
3.条件方程系数矩阵确定:根据条件方程组,将其转化为系数矩阵形式。
4.闭合差计算:根据条件方程和系数矩阵,利用最小二乘法计算闭合差,并评估其精度。
5.参数平差:利用闭合差和条件方程系数矩阵,通过参数平差法计算出导线的平差结果。
6.残差计算:根据平差结果和原始观测数据,计算各个观测量的平差残差,并评估其精度。
四、结果分析和判断1.平差结果分析:对平差结果进行查验和分析,判断平差是否满足要求,是否符合实际测量误差的范围。
2.误差判断:根据平差结果和平差残差,判断是否存在异常误差,如超限误差、粗大误差等。
3.解释和修正:对异常误差进行解释和修正,如重新检查测量数据、进行补充观测等。
以上就是附合导线平差步骤的主要内容,通过这些步骤可以得到导线的最佳平差值,为后续的工程测量提供准确的基础数据。
在实际应用中,还需根据具体情况对平差步骤进行调整和优化,以满足实际工程测量的需求。
测量班冬季培训复习题纲一.填空(每空0分,共计0分)1.水准仪的结构是由(望远镜、水准器、基座)构成的。
2. 测量工作中常用(方位角)来表示直线的方向。
3. 地面点到大地水准面的铅垂距离叫(绝对高程).4. 经纬仪导线外业测量工作的主要内容是(选点并设立标志,距离测量,角度测量)。
5. 水准测量中,水准尺的竖立应( 垂直)6. 设A为后视点,B为前视点,A点高程为35.712m,后视读数为0.983 m ,前视读数为1.149 m ,则A.B两点的高差是(—0.166 m ).7. 在测区内,选定一些具有控制意义和作用的点子称为(控制点).8. 转点在水准测量中起传递(高程)的作用.9. 距离测量的基本单位是(米).10. 方位角的角值范围是(0°--360°).11.将经纬仪安置在O点,盘左照准左测目标A点,水平盘读数为0°01′30″,顺时针方向瞄准B点,水平盘读数为68°07′12″,则水平夹角为(68°05′42″)12.地面点的空间位置是由坐标和高程决定的.13.水准测量的检核方法有测站检核和路线长度检核等.14. 测量的基本工作包括(.测角、测边、测高差)。
15. 水准仪的粗略整平是通过调节(脚螺旋)来实现的.16. 竖直角的角值范围是(0°--90°).17. 在调节水准仪粗平时,要求气泡移动的方向与左手大拇指转动脚螺旋的方向(相同).18.控制导线的布设形式一般为闭合导线和附合导线。
19.水准测量测站校核的方法有改变仪器高法、双面尺法。
20.调节目镜螺旋,可以调节十字丝清晰。
21.从基本方向的北端起,顺时针方向到某一直线的水平夹角,称为该直线的(方位角)22.经纬仪导线最终计算的目的是得到控制点的(坐标)23.水准仪的圆水准器气泡居中,表明仪器达到粗平,长水准管气泡居中,表明仪器达到精平。
24.地面上一条直线的正反方位角之间相差( 180 )度。
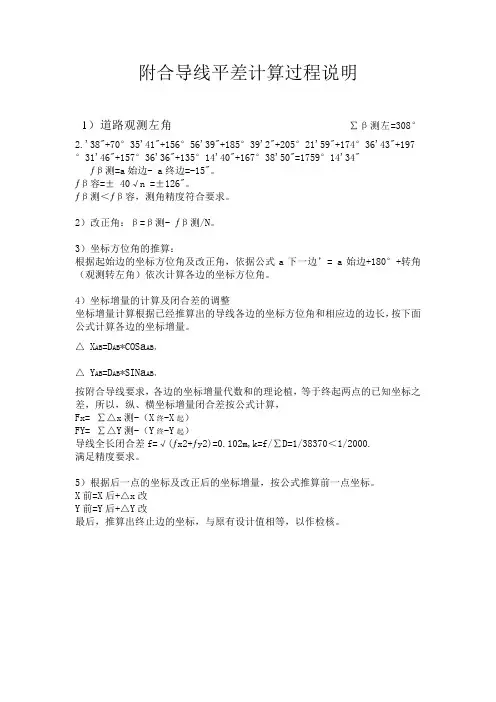
附合导线平差计算过程说明1)道路观测左角∑β测左=308°2.'38"+70°35'41"+156°56'39"+185°39'2"+205°21'59"+174°36'43"+197°31'46"+157°36'36"+135°14'40"+167°38'50"=1759°14'34"ƒβ测=a始边- a终边=-15"。
ƒβ容=± 40√n =±126"。
ƒβ测<ƒβ容,测角精度符合要求。
2)改正角:β=β测- ƒβ测/N。
3)坐标方位角的推算:根据起始边的坐标方位角及改正角,依据公式a下一边’= a始边+180°+转角(观测转左角)依次计算各边的坐标方位角。
4)坐标增量的计算及闭合差的调整坐标增量计算根据已经推算出的导线各边的坐标方位角和相应边的边长,按下面公式计算各边的坐标增量。
△ X AB=D AB*COS a AB,△ Y AB=D AB*SIN a AB,按附合导线要求,各边的坐标增量代数和的理论植,等于终起两点的已知坐标之差,所以,纵、横坐标增量闭合差按公式计算,Fx=∑△x测-(X终-X起)FY=∑△Y测-(Y终-Y起)导线全长闭合差f=√(ƒx2+ƒy2)=0.102m,k=f/∑D=1/38370<1/2000.满足精度要求。
5)根据后一点的坐标及改正后的坐标增量,按公式推算前一点坐标。
X前=X后+△x改Y前=Y后+△Y改最后,推算出终止边的坐标,与原有设计值相等,以作检核。
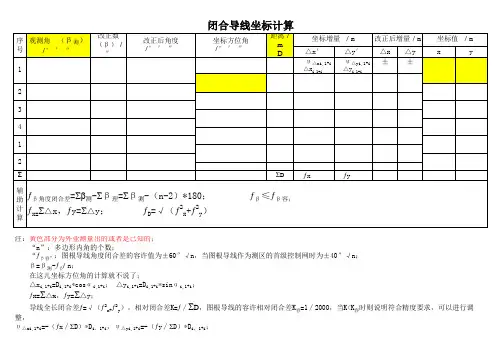
闭合导线坐标计算
注:黄色部分为外业测量出的或者是已知的;
“n”:多边形内角的个数;
“ƒβ容”:图根导线角度闭合差的容许值为±60″√n,当图根导线作为测区的首级控制网时为±40″√n;
β=β测-ƒβ n;
在这儿坐标方位角的计算就不说了;
△x i,1+i=D i,1+i*cosαi,1+i; △y i,1+i=D i,1+i*sinαi,1+i;
ƒx=Ʃ△x,ƒy=Ʃ△y;
导线全长闭合差ƒ=√(ƒ2x+ƒ2y),相对闭合差K=ƒ∕ƩD,图根导线的容许相对闭合差K容=1∕2000,当K<K容时则说明符合精度要求,可以进行调整,
υ△xi,1+i=-(ƒx∕ƩD)*D i,1+i,υ△yi,1+i=-(ƒy∕ƩD)*D i,1+i;
△x △y x y
υ△xi,1+i υ△yi,1+i ±±
△x i,1+i
△y i,1+i
Ʃ
ƩD ƒx ƒy
辅助计算
观测角 (β测) ′ ″改正数
(β) 改正后角度 ′ ″
坐标方位角 ′ ″
56序号1234△x′△y′ƒβ角度闭合差=Ʃβ测-Ʃβ
理=Ʃβ测-(n-2)*180; ƒβ
≤ƒβ容;
ƒx=Ʃ△x,ƒy=Ʃ△y; ƒD =√(ƒ2x +ƒ2y )
注:1、附合导线和闭合导线的差别在于两个方面:①角度闭合差的计算和调整,②坐标增量闭合差的计算;(怎么计算就不一一说了,见谅!)
坐标增量 m 改正后增量 m
坐标值 m 距离 m。
计算方案的设置一、导线类型:1.闭、附合导线(图1)2.无定向导线(图2)3.支导线(图3)4.特殊导线及导线网、高程网(见数据输入一节),该选项适用于所有的导线,但不计算闭合差。
而且该类型不需要填写未知点数目。
当点击表格最后一行时自动添加一行,计算时删除后面的空行。
5.坐标导线。
指使用全站仪直接观测坐标、高程的闭、附合导线。
6.单面单程水准测量记录计算。
指仅进行单面读数且仅进行往测而无返测的水准测量记录计算。
当数据中没有输入“中视”时可以用作五等、等外水准等的记录计算。
当输入了“中视”时可以用作中平测量等的记录计算。
说明:除“单面单程水准测量记录计算”仅用于低等级的水准测量记录计算外,其它类型选项都可以进行平面及高程的平差计算,输入了平面数据则进行平面的平差,输入了高程数据则进行高程的平差,同时输入则同时平差。
如果不需进行平面的平差,仅计算闭、附合高程路线,可以选择类型为“无定向导线”,或者选择类型为“闭附合导线”但表格中第一行及最后一行数据(均为定向点)不必输入,因为高程路线不需定向点。
二、概算1.对方向、边长进行投影改化及边长的高程归化,也可以只选择其中的一项改正。
2.应选择相应的坐标系统,以及Y坐标是否包含500KM。
选择了概算时,Y坐标不应包含带号。
三、等级与限差1.在选择好导线类型后,再选择平面及高程的等级,以便根据《工程测量规范》自动填写限差等设置。
如果填写的值不符合您所使用的规范,则再修改各项值的设置。
比如现行的《公路勘测规范》的三级导线比《工程测量规范》的三级导线要求要低一些。
2.导线测量平差4.2及以前版本没有设置限差,打开4.2及以前版本时请注意重新设置限差。
四、近似平差与严密平差的选择及近似平差的方位角、边长是否反算1.近似平差:程序先分配角度闭合差再分配坐标增量闭合差,即分别平差法。
2.严密平差:按最小二乘法原理平差。
3.《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。
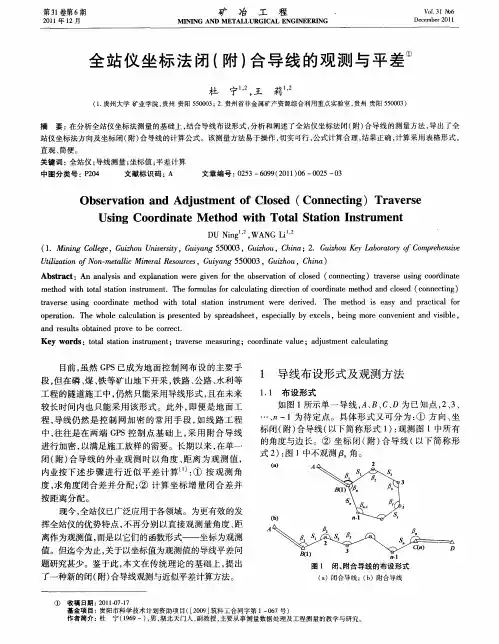
随着全站仪在工程测量中应用的逐渐普及,采用导线作为测量的平面控制越来越广泛,导线一般多布设成单一导线。
应用全站仪观测导线,可以通过机内的微处理器,直接得到地面点的平面近似坐标,因此在成果处理时可以应用这些近似坐标直接按坐标平差(即间接平差)法进行平差。
本文主要针对采用全站仪观测导线的近似平差和严密平差方法进行探讨。
导线的近似坐标平差导线测量用于图根控制等低精度测量中,往往采用近似平差即可。
由于全站仪直接测定各导线点的近似坐标值,平差计算就不用像传统的导线近似平差计算那样,先进行角度闭合差计算和调整,然后推算方位角,再进行坐标增量闭合差的计算和调整,最后根据平差后的坐标增量计算导线点的坐标。
全站仪观测导线直接按坐标平差计算,将更为简便。
直接按坐标平差法计算步骤如下:假设有一条附合导线,由于存在观测误差,最后测得的一点(假设为C)坐标与该点已知坐标(xc,yc)不一致,其差值即为纵、横坐标增量闭合差,即(1)导线全长闭合差为f:(2)导线全长相对闭合差为:(3)此时若满足要求的精度,就可以直接根据坐标增量闭合差来计算各个导线点的坐标改正数,各导线点的坐标改正值计算公式为:(4)改正后各点坐标xi、yi为:(5)式中,∆x1、∆x2、∆x i、∆y1、∆y2、∆y i、分别为第一、第二和第i条边的近似坐标增量;x i’、y i’为各待定点坐标的观测值(即全站仪外业直接观测的导线点的坐标)。
采用坐标法进行导线近似平差,直接在已经测得导线点的坐标上进行改正,方法简单,易于掌握,避免了传统近似平差法的方位角的推算和改正,以及坐标增量的计算和改正,能大大提高工作效率,而且不易出错。
同时可以看出传统附和导线测量需要两条已知边,作为方位角的检核条件,而直接坐标法,只需要一条已知边和一个已知点即可,使导线的布网更加灵活。
导线的严密坐标平差采用全站仪观测导线的优势高等级平面控制测量对精度的要求较高,需要严密平差。
全站仪观测的导线采用严密坐标平差法较为适宜。
计算方案得设置一、导线类型:1、闭、附合导线(图1)2、无定向导线(图2)3、支导线(图3)4、特殊导线及导线网、高程网(见数据输入一节),该选项适用于所有得导线,但不计算闭合差。
而且该类型不需要填写未知点数目。
当点击表格最后一行时自动添加一行,计算时删除后面得空行。
5、坐标导线。
指使用全站仪直接观测坐标、高程得闭、附合导线。
6、单面单程水准测量记录计算。
指仅进行单面读数且仅进行往测而无返测得水准测量记录计算。
当数据中没有输入“中视”时可以用作五等、等外水准等得记录计算。
当输入了“中视”时可以用作中平测量等得记录计算。
说明: 除“单面单程水准测量记录计算”仅用于低等级得水准测量记录计算外,其它类型选项都可以进行平面及高程得平差计算,输入了平面数据则进行平面得平差,输入了高程数据则进行高程得平差,同时输入则同时平差。
如果不需进行平面得平差,仅计算闭、附合高程路线,可以选择类型为“无定向导线”,或者选择类型为“闭附合导线”但表格中第一行及最后一行数据(均为定向点)不必输入,因为高程路线不需定向点。
二、概算1、对方向、边长进行投影改化及边长得高程归化,也可以只选择其中得一项改正。
2、应选择相应得坐标系统,以及Y坐标就是否包含500KM。
选择了概算时,Y坐标不应包含带号。
三、等级与限差1、在选择好导线类型后,再选择平面及高程得等级,以便根据《工程测量规范》自动填写限差等设置。
如果填写得值不符合您所使用得规范,则再修改各项值得设置。
比如现行得《公路勘测规范》得三级导线比《工程测量规范》得三级导线要求要低一些。
2、导线测量平差4、2及以前版本没有设置限差,打开4、2及以前版本时请注意重新设置限差。
四、近似平差与严密平差得选择及近似平差得方位角、边长就是否反算1、近似平差:程序先分配角度闭合差再分配坐标增量闭合差,即分别平差法。
2、严密平差:按最小二乘法原理平差。
3、《工程测量规范》规定:一级及以上平面控制网得计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。
计算方案的设置一、导线类型:1.闭、附合导线(图1)2.无定向导线(图2)3.支导线(图3)4.特殊导线及导线网、高程网(见数据输入一节),该选项适用于所有的导线,但不计算闭合差。
而且该类型不需要填写未知点数目。
当点击表格最后一行时自动添加一行,计算时删除后面的空行。
5.坐标导线。
指使用全站仪直接观测坐标、高程的闭、附合导线。
6.单面单程水准测量记录计算。
指仅进行单面读数且仅进行往测而无返测的水准测量记录计算。
当数据中没有输入“中视”时可以用作五等、等外水准等的记录计算。
当输入了“中视”时可以用作中平测量等的记录计算。
说明:除“单面单程水准测量记录计算”仅用于低等级的水准测量记录计算外,其它类型选项都可以进行平面及高程的平差计算,输入了平面数据则进行平面的平差,输入了高程数据则进行高程的平差,同时输入则同时平差。
如果不需进行平面的平差,仅计算闭、附合高程路线,可以选择类型为“无定向导线”,或者选择类型为“闭附合导线”但表格中第一行及最后一行数据(均为定向点)不必输入,因为高程路线不需定向点。
二、概算1.对方向、边长进行投影改化及边长的高程归化,也可以只选择其中的一项改正。
2.应选择相应的坐标系统,以及Y坐标是否包含500KM。
选择了概算时,Y坐标不应包含带号。
三、等级与限差1.在选择好导线类型后,再选择平面及高程的等级,以便根据《工程测量规范》自动填写限差等设置。
如果填写的值不符合您所使用的规范,则再修改各项值的设置。
比如现行的《公路勘测规范》的三级导线比《工程测量规范》的三级导线要求要低一些。
2.导线测量平差4.2及以前版本没有设置限差,打开4.2及以前版本时请注意重新设置限差。
四、近似平差与严密平差的选择及近似平差的方位角、边长是否反算1.近似平差:程序先分配角度闭合差再分配坐标增量闭合差,即分别平差法。
2.严密平差:按最小二乘法原理平差。
3.《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。

附合导线严密平差算法总结图1如图的单一附合导线,有4个已知点A、B、C、D,2个未知点TP1、TP2。
设观测边数为n, 则未知点数为n-1, 观测角数为n+1。
以上图为例,n = 3。
观测边为:S1 = B->TP1,S2 = TP1->TP2, S3 = TP2->C思路:由于A、B坐标已知,则可以算出起始方位角,再根据B点坐标和每个观测角(夹角,左角)推算出TP1、TP2、C点的近似坐标值。
如果是用全站仪进行测量,则用盘左盘右重复观测求平均的方式,直接测出TP1、TP2、C点的近似坐标值以及CD的方位角。
再根据c点的已知坐标与近似坐标求坐标闭合差,由CD的已知方位角和近似方位角求角度闭合差,两个闭合差联立求得边长和角度的改正数,最后求得未知点的坐标平差值。
条件平差过程:1.建立条件方程,求得条件系数2.求法方程系数3.求权阵4.计算出联系数K5.解算出观测值改正数V6.由观测值和改正数计算平差值详细步骤如下:1、建立条件方程在单一附合导线中,只需要三个条件方程即:方位角附合条件、纵坐标附合条件和横坐标附合条件方程。
(省略了条件方程的推导过程,详细过程请查看参考资料:《测量平差.pps》)(1)方位角附合条件[Vβi]n+11+ Wβ= 0式中,Wβ= - (T0– T CD+ [βi]n+11 - (n+1)*180°)(角度闭合差)βi ——角度观测值(夹角,左角)Vβi ——各观测角的改正数。
如果是用全站仪观测,则Wβ= - (T CD– T CD)式中,T CD ——CD的方位角观测值,T CD ——CD的已知方位角(2)纵坐标X附合条件方程[Cos TI * VSi]1n - (1/ ρ”)* [(Yn+1- Yi) * Vβi]1n - W x = 0;式中,TI——各方位角观测值(近似值)VSi——边长改正数Yn+1—— C点即终止点的横坐标Y的观测值(近似值)Yi——待定点的横坐标Y的观测值Wx = - (Xn+1- XC)XC—— C点即终止点的纵坐标X的已知值ρ” = 2062.65(3)横坐标Y附合条件方程[Sin TI * VSi]1n + (1/ ρ”)* [(Xn+1- Xi) * Vβi]1n– W Y = 0;式中,TI——各方位角观测值(近似值)VSi——边长改正数Xn+1—— C点即终止点的纵坐标X的观测值(近似值)Xi——待定点的纵坐标X的观测值WX = - (Yn+1- YC)YC—— C点即终止点的横坐标Y的已知值ρ” = 2062.652、求条件方程的系数矩阵联立3个方程得改正数条件方程组:[Vβi]n+11+ Wβ= 0[Cos TI * VSi]1n - 1/ ρ”* [(Yn+1- Yi) * Vβi]1n - W x = 0;[Sin TI * VSi]1n + 1/ ρ”* [(Xn+1- Xi) * Vβi]1n– W Y = 0;其系数矩阵arrA为:(即改正数V的系数,此处以图1为例, n = 3)3、联系数法方程(简称法方程)AP-1A T K – W = 0A——系数矩阵arrAK ——乘系数P ——权阵W ——闭合差矩阵由上得法方程的系数阵N:N = AP-1A T(权的推导见参考资料:《全站仪观测导线测量平差方法的研究.pdf》)角度权:P βi = 1;(因为角度的标称精度是固定的,各观测角权值相等) 边长权:P Si = (μ0 *μ0 ) / (M D * M D )(误差比例系数固定,边长的误差与距离有关,因此不一致)式中,μ0 ——先验测角中误差,以秒为单位 M D —— 距离观测中误差若 导线边长为S i (米),e1 为仪器的边长标称固定误差(mm ),e2为仪器的边长比例误差系数(无单位),则M D = ± (e1 + e2 * S i * 0.001)mm 需转化为厘米:M D = M D ** 0.1 (cm )由于此处是要P 的逆矩阵P -1,因此要求P 的各元素的倒数(P 是对角矩阵,对角矩阵的逆矩阵就是原矩阵元素的倒数) Psi = 1/ Psi ;由上可得,P -1 矩阵如下:4、求改正数由于N 已经在前面的步骤中求出,求N 的逆矩阵。
附合导线计算方法已知A (X=2507.69,Y=1215.63),B (X=2299.83,Y=1303.8),C (X=2166.74,Y=1757.27),D (X=2361.71,Y=1964.32)四点坐标,及a AB (起始边),a CD (终止边)计算得出。
ƒAB =tan -1(XA XB YA YB --)=tan -1(2507.6983.229963.12158.1303--)=-22。
59”08.47’ =-22。
59”08.47’+180=157000”52’(计算方位角为负,所以要加上180)同理求出ƒCD 方位角坐标为46045”231:用求出 ƒAB ±观测角(左正右负)±180,依次加减,得出最后的ƒ‘CD 方位角,用计算的方位角ƒ‘CD -ƒCD =闭合差值B1方位角=157000”52’-192。
14,24,,+180=144。
46,28,,12方位角=144。
46,28,,-236。
48,36,,+180=87。
57,52,,23方位角=87。
57,52,,-170。
39,36,,,+180=97。
38,16,, 34方位角=97。
38,16,,-180。
00,48,,+180=97。
17,28,,4C 方位角=97。
17,28,, -230。
32,36,,+180=46。
44,52,,ƒ‘CD -ƒCD =46。
44,52,,-46045”23’=-31” 将角度闭合差除与测边数分配到各观测角中即:-31÷5=-6.2”(角度闭合差调整中,观测角为左角时反符号平均分配到各观测角中,观测角为右角时,则按闭合差同符号分配到测角,如有小数,按长边少分,短边多分原则)即:B1观测角=192。
14,24,,-6”=192。
14,18,,12观测角=236。
48,36,,-6”=236。
48,30,,23观测角=170。
39,36,,-6”=170。
三、导线测量的外业工作CAD、CASS、纬地语言编程、excel VBA语言编程、VB可视化编程、主流软件的使用(如:CAD、CASS、纬地等),其次更需要明确测量的内涵。
(一)踏勘选点选点就是在测区内选定控制点的位置。
选点之前应收集测区已有地形图和高一级控制点的成果资料。
根据测图要求,确定导线的等级、形式、布置方案。
在地形图上拟定导线初步布设方案,再到实地踏勘,选定导线点的位置。
若测区范围内无可供参考的地形图时,通过踏勘,根据测区范围、地形条件直接在实地拟定导线布设方案,选定导线的位置。
导线点点位选择必须注意以下几个方面:1、为了方便测角,相邻导线点间要通视良好,视线远离障碍物,保证成像清晰。
2、采用光电测距仪测边长,导线边应离开强电磁场和发热体的干扰,测线上不应有树枝、电线等障碍物。
四等级以上的测线,应离开地面或障碍物1.3 以上。
3、导线点应埋在地面坚实、不易被破坏处,一般应埋设标石。
4、导线点要有一定的密度,以便控制整个测区。
5、导线边长要大致相等,不能悬殊过大。
导线点埋设后,要在桩上用红油漆写明点名、编号,并用红油漆在固定地物上画一箭头指向导线点并绘制“点之记”方便寻找导线点,如图6-5所示。
(一)踏勘选点选点就是在测区内选定控制点的位置。
选点之前应收集测区已有地形图和高一级控制点的成果资料。
根据测图要求,确定导线的等级、形式、布置方案。
在地形图上拟定导线初步布设方案,再到实地踏勘,选定导线点的位置。
若测区范围内无可供参考的地形图时,通过踏勘,根据测区范围、地形条件直接在实地拟定导线布设方案,选定导线的位置。
导线点点位选择必须注意以下几个方面:1、为了方便测角,相邻导线点间要通视良好,视线远离障碍物,保证成像清晰。
2、采用光电测距仪测边长,导线边应离开强电磁场和发热体的干扰,测线上不应有树枝、电线等障碍物。
四等级以上的测线,应离开地面或障碍物1.3 以上。
3、导线点应埋在地面坚实、不易被破坏处,一般应埋设标石。
控制点坐标平差处理城市平面控制网的种类较多,有GPS网、三角网、边角组合网和导线网,其中导线网按等级划分为三、四等和一、二、三级。
本文以附合导线的内业数据处理为例,说明控制点坐标平差处理的方法。
导线的内业计算,就是根据起始点的坐标和起始边的坐标方位角,以及所观测的导线边长和转折角,计算各导线点的坐标。
计算的目的除了求得各导线点的坐标外,还有就是检核导线外业测量成果的精度。
在转入内业计算之前,应整理并全面检查外业测量的基础资料,检查数据是否完整,是否有记录错误和计算错误,是否满足精度要求,起算数据是否正确和完整,然后绘制相应导线的平面草图,并将相关数据标示于草图的对应部位。
如图2-21所示的附合导线,观测转折角为左角,计算的步骤如下:(1)填表。
计算之前,首先将示意图中各观测数据(观测角和边长)和已知数据(起始边和附合边的坐标方位角,起始点和终止点的坐标)填入相应表格之中,如表2-19所示。
(2)角度闭合差的计算与调整。
如图2-20所示的附合导线,观测转折角为左角,根据坐标方位角的推算公式可以依次计算各边的坐标方位角:αA1=αBA+180°+βAα12=αA1+180°+β1α2C=α12+180°+β2+)αCD′=α2C+180°+βCαCD ′=αBA+4×180°+∑β测左计算终边坐标方位角的一般公式为:α终边′=α始边+n·180°+∑β测左(2-5)式中n为导线观测角个数。
角度闭合差的计算公式为:fβ测=α终边′-α终边(2-6)图2-21 附合导线计算示意图角度闭合差fβ的大小,表明测角精度的高低。
对于不同等级的导线,有不同的限差(即fβ容)要求,例如图根导线角度闭合差的允许值为:fβ容=±60″n(2-7)式中n为多边形内角的个数。
这一步计算见辅助计算栏,fβ测=+41″, fβ容=±120″。
导线坐标平差计算
导线坐标平差计算是测量工程中的一项重要内容,它主要用于对测量
得到的导线坐标进行优化和校正,以提高测量结果的精度和可靠性。
导线
坐标平差计算的基本原理是利用最小二乘法对测量数据进行拟合,找到坐
标平差值,从而使得观测数据与平差结果之间的误差最小。
1.数据处理和准备:整理和处理测量数据,包括观测值的录入、校正、筛选和排除异常值等。
2.拟合模型的选择:根据实际情况选择拟合模型,一般可以选择直线
模型、曲线模型和平面模型等。
3.参数估计:利用最小二乘法对观测数据进行拟合,求解坐标平差值。
4.结果验证和分析:对计算结果进行验证和分析,评估测量精度和可
靠性。
5.结果处理和报告:对计算结果进行处理和整理,生成平差报告。
导线坐标平差计算的关键在于确定适当的拟合模型和求解方法。
常见
的拟合模型有直线模型、曲线模型和平面模型等。
直线模型适用于简单直
线型测量;曲线模型适用于曲线导线的测量;平面模型适用于平面控制点
的测量。
求解方法常用最小二乘法,它可以通过最小化观测残差的平方和
来求解坐标平差值,使得拟合结果最佳。
总之,导线坐标平差计算是一项重要的测量数据处理方法,通过对测
量数据进行拟合和优化,可以提高测量结果的精度和可靠性。
在实际工程中,需要选择适当的拟合模型和求解方法,并进行误差分析和合理性检验,以获得准确可靠的导线坐标平差结果。