方差分量估计算例
- 格式:docx
- 大小:263.94 KB
- 文档页数:17
Helmert方差分量估计算法论文摘要:本文在实现计算编程基础上,结合具体工程仿真计算说明Helmert方差分量估计在对深化平差计算理论和工程实践中有重要的借鉴意义。
1 Helmert方差分量估计理论Helmert方差分量估计是通过对观测量较多且分类合理的平差数据通过验后方差—协方差进行重新定权,不断调整观测值的权比关系,直到达到迭代结果收敛。
Helmert方差—协方差分量估计的计算步骤为:2 Helmert方差分量估计的编程处理本文采用C#语言对Helmert方差分量估计在测量平差中编程计算的算法进行阐述,为了便于矩阵的运算,需要制作一个Matrix.cs文件并引用。
定义所有观测量权矩阵PP,固定权观测量PP0,第i个观测量分量权矩阵为PPi:根据误差方程公式所有观测量 mtxMultiplyBTPB,固定权观测量mtxMultiplyBTPB0,第i个观测量方差分量mtxMultiplyBTPBi,分别进行转秩矩阵运算。
MatrixmtxMultiplyBTPB=mtxTransposeBB.Multiply(mtxPP).Multiply(mtxBB);MatrixmtxMultiplyBTPBi=mtxTransposeBBi.Multiply(mtxPPi).Multiply(mtxBBi);MatrixmtxMultiplyBTPB0=mtxTransposeBB0.Multiply(mtxPP0).Multiply(mtxBB0);Matrix mtxTransposeBB=mtxBB.Transpose();Matrix mtxTransposeBBi=mtxBBi.Transpose();Matrix mtxMultiplyBTPB0=mtxBB0.Transpose();Matrix mtxLiL = new Matrix((所有观测量的个数),1);构造线性方程组后,定义矩阵mtxResult1为方程求解的值。
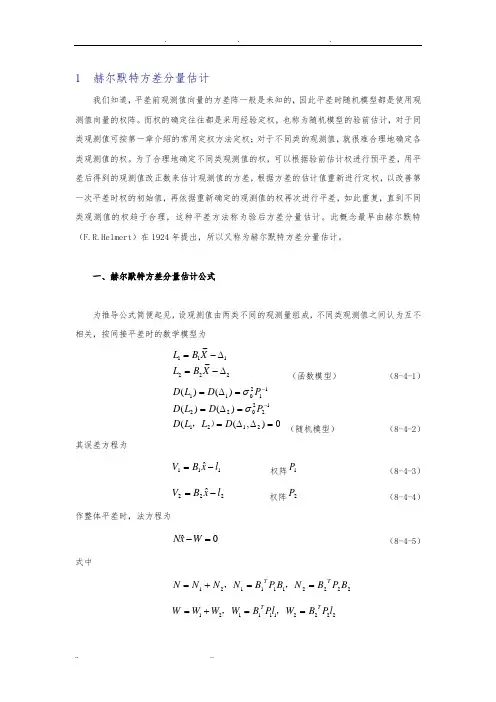
赫尔默特方差分量估计1 赫尔默特方差分量估计我们知道,平差前观测值向量的方差阵一般是未知的,因此平差时随机模型都是使用观测值向量的权阵。
而权的确定往往都是采用经验定权,也称为随机模型的验前估计,对于同类观测值可按第一章介绍的常用定权方法定权;对于不同类的观测值,就很难合理地确定各类观测值的权。
为了合理地确定不同类观测值的权,可以根据验前估计权进行预平差,用平差后得到的观测值改正数来估计观测值的方差,根据方差的估计值重新进行定权,以改善第一次平差时权的初始值,再依据重新确定的观测值的权再次进行平差,如此重复,直到不同类观测值的权趋于合理,这种平差方法称为验后方差分量估计。
此概念最早由赫尔默特(F.R.Helmert )在1924年提出,所以又称为赫尔默特方差分量估计。
一、赫尔默特方差分量估计公式为推导公式简便起见,设观测值由两类不同的观测量组成,不同类观测值之间认为互不相关,按间接平差时的数学模型为222111~~∆-=∆-=X B L X B L (函数模型) (8-4-1)0),(()()()()(2121122022112011=∆∆==∆==∆=--D L L D P D L D P D L D ),σσ (随机模型) (8-4-2)其误差方程为111ˆl xB V -= 权阵1P (8-4-3) 222ˆl xB V -= 权阵2P (8-4-4)作整体平差时,法方程为0ˆ=-W x N (8-4-5)式中2222111121B P B N B P B N N N N TT==+=,,2222111121l P B W l PB W W W W TT==+=,, 一般情况下,由于第一次给定的权1P 、2P 是不恰当的,或者说它们对应的单位权方差是不相等的,设为201σ和202σ,则有122022112011)()(--==P L D P L D σσ(8-4-6)但只有20202201σσσ==才认为定权合理。
联合平差中的方差分量估计问题的探讨摘要:联合平差是一种常用的测量数据处理方法,其优点在于可以同时处理多种测量数据,提高了精度和可靠性。
然而,在实际应用中,由于各种测量数据的误差来源和特点不同,联合平差中的方差分量估计问题一直是一个难点。
本文通过对方差分量的概念和估计方法的分析,提出了一种基于加权方差分量估计的方法,并通过实例分析验证了该方法的有效性。
关键词:联合平差;方差分量;加权方差分量估计一、引言联合平差是一种常用的测量数据处理方法,其优点在于可以同时处理多种测量数据,提高了精度和可靠性。
联合平差的基本思想是将各种测量数据联合起来,通过最小二乘法求解所有未知参数,从而达到数据处理的最优化。
然而,在实际应用中,由于各种测量数据的误差来源和特点不同,联合平差中的方差分量估计问题一直是一个难点。
本文将对方差分量的概念和估计方法进行探讨,提出一种基于加权方差分量估计的方法,并通过实例分析验证其有效性。
二、方差分量的概念在联合平差中,方差分量是指各种测量数据误差的方差或协方差。
方差分量是测量数据精度的一个重要指标,直接影响到联合平差结果的精度和可靠性。
在联合平差中,方差分量通常分为内部方差分量和外部方差分量两类。
内部方差分量是指同一种测量数据的误差方差或协方差,例如,水准测量中的同一测高仪的读数误差方差。
内部方差分量是由测量仪器和人为误差引起的,可以通过实验和理论分析进行估计。
外部方差分量是指不同种测量数据之间的误差方差或协方差,例如,水准测量中的高差测量和距离测量之间的误差协方差。
外部方差分量是由地形和气象等自然因素引起的,通常无法通过实验和理论分析进行估计,只能通过实际测量数据进行估计。
三、方差分量的估计方法在联合平差中,方差分量的估计方法有很多种,常用的有最小二乘估计法、极大似然估计法、加权最小二乘估计法等。
最小二乘估计法是指在满足最小二乘原理的前提下,对方差分量进行估计。
最小二乘估计法的优点在于简单易行,但是对于外部方差分量的估计存在一定的困难。
1 赫尔默特方差分量估计我们知道,平差前观测值向量的方差阵一般是未知的,因此平差时随机模型都是使用观测值向量的权阵。
而权的确定往往都是采用经验定权,也称为随机模型的验前估计,对于同类观测值可按第一章介绍的常用定权方法定权;对于不同类的观测值,就很难合理地确定各类观测值的权。
为了合理地确定不同类观测值的权,可以根据验前估计权进行预平差,用平差后得到的观测值改正数来估计观测值的方差,根据方差的估计值重新进行定权,以改善第一次平差时权的初始值,再依据重新确定的观测值的权再次进行平差,如此重复,直到不同类观测值的权趋于合理,这种平差方法称为验后方差分量估计。
此概念最早由赫尔默特(F.R.Helmert )在1924年提出,所以又称为赫尔默特方差分量估计。
一、赫尔默特方差分量估计公式为推导公式简便起见,设观测值由两类不同的观测量组成,不同类观测值之间认为互不相关,按间接平差时的数学模型为222111~~∆-=∆-=X B L X B L (函数模型) (8-4-1) 0),(()()()()(2121122022112011=∆∆==∆==∆=--D L L D P D L D P D L D ),σσ (随机模型)(8-4-2)其误差方程为111ˆl xB V -= 权阵1P (8-4-3) 222ˆl xB V -= 权阵2P (8-4-4) 作整体平差时,法方程为0ˆ=-W xN (8-4-5) 式中2222111121B P B N B PB N N N N TT==+=,, 2222111121l P B W l PB W W W W TT ==+=,,一般情况下,由于第一次给定的权1P 、2P 是不恰当的,或者说它们对应的单位权方差是不相等的,设为201σ和202σ,则有122022112011)()(--==P L D P L D σσ (8-4-6)但只有20202201σσσ==才认为定权合理。
联合平差中的方差分量估计问题的探讨联合平差是一种常用的测量数据处理方法,它可以将多组测量数据进行综合处理,以得到更为准确的测量结果。
在联合平差中,方差分量估计问题是一个非常重要的问题,它关系到平差结果的准确性和稳定性。
本文将探讨联合平差中的方差分量估计问题,并提出一些解决方案。
一、方差分量的定义和估计在联合平差中,方差分量是指各个观测量误差的方差,包括自由项、距离观测误差、角度观测误差、高程观测误差等。
方差分量的估计是测量数据处理中的一个重要环节,它直接影响到平差结果的准确性和稳定性。
常用的方差分量估计方法有三种:经验估计法、解析估计法和半经验估计法。
其中,经验估计法是一种基于历史数据的经验性估计方法,它的优点是简单易行,但缺点是对于新的测量任务,其估计结果可能不够准确。
解析估计法是一种基于理论分析的估计方法,它的优点是准确性高,但缺点是计算复杂度较高,需要较高的数学水平。
半经验估计法是一种综合前两种方法的估计方法,它的优点是既考虑了历史数据的经验性,又考虑了理论分析的准确性,但缺点是需要一定的经验和理论基础。
二、方差分量估计中的问题在方差分量估计中,存在一些常见的问题,需要引起注意。
这些问题包括:1.方差分量的相关性:不同的观测量误差之间可能存在相关性,而传统的方差分量估计方法通常是基于假设各个误差之间是相互独立的。
因此,如果存在相关性,就可能导致估计结果偏差较大。
2.方差分量的不确定性:由于方差分量估计是基于有限的样本数据进行的,因此存在一定的不确定性。
特别是在样本数据量较小的情况下,估计结果的不确定性会更加显著。
3.方差分量的稳定性:方差分量估计的稳定性是指在不同的测量任务和不同的测量条件下,估计结果的稳定性。
如果估计结果稳定性较差,就可能导致平差结果的准确性和稳定性受到影响。
三、方差分量估计的解决方案为了解决方差分量估计中存在的问题,可以采用以下解决方案: 1.建立方差分量的相关性模型:通过对历史数据的分析,建立各个观测量误差之间的相关性模型。
1 赫尔默特方差分量估计我们知道,平差前观测值向量的方差阵一般是未知的,因此平差时随机模型都是使用观测值向量的权阵。
而权的确定往往都是采用经验定权,也称为随机模型的验前估计,对于同类观测值可按第一章介绍的常用定权方法定权;对于不同类的观测值,就很难合理地确定各类观测值的权。
为了合理地确定不同类观测值的权,可以根据验前估计权进行预平差,用平差后得到的观测值改正数来估计观测值的方差,根据方差的估计值重新进行定权,以改善第一次平差时权的初始值,再依据重新确定的观测值的权再次进行平差,如此重复,直到不同类观测值的权趋于合理,这种平差方法称为验后方差分量估计。
此概念最早由赫尔默特(F.R.Helmert )在1924年提出,所以又称为赫尔默特方差分量估计。
一、赫尔默特方差分量估计公式为推导公式简便起见,设观测值由两类不同的观测量组成,不同类观测值之间认为互不相关,按间接平差时的数学模型为222111~~∆-=∆-=X B L X B L (函数模型) (8-4-1)0),(()()()()(2121122022112011=∆∆==∆==∆=--D L L D P D L D P D L D ),σσ (随机模型) (8-4-2)其误差方程为111ˆl xB V -= 权阵1P (8-4-3)222ˆl xB V -= 权阵2P (8-4-4) 作整体平差时,法方程为0ˆ=-W xN (8-4-5)式中2222111121B P B N B PB N N N N TT==+=,, 2222111121l P B W l PB W W W W TT ==+=,,一般情况下,由于第一次给定的权1P 、2P 是不恰当的,或者说它们对应的单位权方差是不相等的,设为201σ和202σ,则有122022112011)()(--==P L D P L D σσ(8-4-6)但只有20202201σσσ==才认为定权合理。
第四章 方差分量线性回归模型本章考虑的线性模型不仅有固定效应、随机误差,而且有随机效应。
我们先从随机效应角度理解回归概念,导出方差分量模型,然后研究模型三种主要解法。
最后本章介绍关于方差分量模型的两个前沿研究成果,是作者近期在《应用数学学报》与国际数学杂志《Communications in Statistics 》上发表的。
第一节 随机效应与方差分量模型一、随机效应回归模型前面所介绍的回归模型不仅都是线性的,而且自变量看作是固定效应。
我们从资料对npi i i X X Y 11},,{ 出发建立回归模型,过去一直是把Y 看作随机的,X 1,…,X p 看作非随机的。
但是实际上,自变量也经常是随机的,而并不是我们可以事先设计好的设计矩阵。
我们把自变量也是随机变量的回归模型称为随机效应回归模型。
究竟一个回归模型的自变量是随机的还是非随机的,要视具体情况而定。
比如一般情况下消费函数可写为)(0T X b C C -+=(4.1.1)这里X 是居民收入,T 是税收,C 0是生存基本消费,b 是待估系数。
加上随机扰动项,就是一元线性回归模型ε+-+=)(0T X b C C(4.1.2)那么自变量到底是固定效应还是随机效应?那要看你采样情况。
如果你是按一定收入的家庭去调查他的消费,那是取设计矩阵,固定效应。
如果你是随机抽取一些家庭,不管他收入如何都登记他的收入与消费,那就是随机效应。
对于随机效应的回归模型,我们可以从条件期望的角度推导出与最小二乘法则等价的回归函数。
我们希望通过X 预测Y ,也就是要寻找一个函数),,()(1p X X M X M Y ==,当X 的观察值为x 时,这个预测的误差平均起来应达到最小,即22)]([min )]([X L Y E X M Y E L-=-(4.1.3)这里min 是对一切X 的可测函数L(X)取极小。
由于当)|()(X Y E X M =(4.1.4)时,容易证明0)]()()][([=--X L X M X M Y E(4.1.5)故当)|()(X Y E X M =时,222)]()([)]([)]([X L X M E X M Y E X L Y E -+-=-(4.1.6)要使上式左边极小,只有取)|()()(X Y E X M X L ==。
Partial EIV模型的方差分量估计及其应用研究在平差数据处理中,观测值的先验权值往往存在不可靠性,如何根据平差的函数模型与随机模型进行随机模型的修正从而得到更加合理的参数估值是一个值得研究的重要问题。
变量误差(EIV,error-in-variables)模型是顾及了系数矩阵误差的平差模型,针对EIV模型中系数矩阵存在随机元素与非随机元素的情况有部分变量误差(Partial EIV,partial error-in-variables)模型;总体最小二乘(TLS,total least squares)方法为EIV模型及Partial EIV模型的严密估计方法。
相比于Partial EIV模型丰富的参数估计方法,Partial EIV随机模型的研究较少,未对随机模型进行扩展研究,需要进一步发展。
本文根据已有的方差分量估计方法,扩展Partial EIV随机模型形式,考虑总体最小二乘参数估值的偏差及方差分量估计中出现的负方差,研究Partial EIV模型更为一般性的方差分量估计方法并将其应用于实际中,旨在获得修正随机模型下更加合理的参数估值及观测值权重信息。
本文的具体研究如下:研究了Partial EIV模型的非负最小二乘方差分量估计方法。
首先推导了Partial EIV模型的最小二乘方差分量估计公式并给出相应的迭代算法,分析了Partial EIV模型方差分量估计与已有方法的等价性;其次针对负方差的出现,将非负最小二乘估计方法应用于非负最小二乘方差分量估计中,给出相应的迭代步骤。
本文推导的方法继承了原有Partial EIV模型的优势,且可以得到非负约束下的方差分量估值。
研究了相关观测和偏差改正的Partial EIV模型方差分量估计方法。
推导了相关观测情形下的迭代算法及方差分量估计方法,将Partial EIV模型视为非线性模型,线性化得到最小二乘形式并进行方差分量估计公式的推导,验证了不同方差分量估计方法公式的等价性;考虑Partial EIV模型参数估值的偏差,将偏差改正与参数估计和方差分量估计作为整体进行迭代计算,基于二阶近似函数法进行偏差改正后方差分量估计参数估值的精度评定。
方差分量符号
(实用版)
目录
1.方差的定义与意义
2.方差分量符号的表示方法
3.方差分量符号的计算方法
4.方差分量符号的应用实例
5.方差分量符号的优缺点分析
正文
方差是衡量一组数据离散程度的统计量,其定义为各数据与其算术平均数的离差平方和的平均数。
方差分量符号是用来表示各个数据在总方差中所占的比例或分量,它可以帮助我们更好地了解各个数据对总体离散程度的贡献。
方差分量符号有两种表示方法,分别为 Vi 和 1-Vi。
其中,Vi 表示第 i 个数据在总方差中的分量,1-Vi 表示第 i 个数据在总方差中的权重。
这两种表示方法在不同的场景下有各自的应用价值。
方差分量符号的计算方法如下:
Vi = (xi - x) / Σ(xi - x)
其中,xi 表示第 i 个数据,x表示数据的算术平均数,Σ表示对所有数据进行求和。
方差分量符号在实际应用中有很多实例,例如在数据分析、风险评估、投资决策等领域。
通过计算各个数据的方差分量,我们可以了解各个数据对总体离散程度的影响,从而更好地进行数据分析和决策。
方差分量符号的优点在于它可以直观地表示各个数据在总体离散程
度中的贡献,有助于我们更好地理解数据的重要性。
然而,方差分量符号也存在一定的局限性,例如在数据量较大时,计算方差分量符号的复杂度会较高,可能会影响分析效率。
总之,方差分量符号作为一种衡量各个数据在总体离散程度中贡献的指标,具有重要的实际应用价值。
【例10-4】如图10-1边角网,C B A 、、点为已知点,E D 、为待定点,同精度独立观测了12个角度和6条边长,据分别列于表10-1和表10-2。
先验测角中误差"±=5.1βσ,先验边长测量中误差为cm S 0.2±=σ。
试按间接平差法进行赫尔默特方差分量估计,并求出:(1)观测值的方差估值;(2)待定点坐标平差值及其方差估值。
表10-1基准数据表 表10-2 观测值数据表 设置本例题的目的:理解、熟悉赫尔默特方差分量估计方法的方差估计过程。
解:分析:此题为边角网,因此,将角度、边长作为两类观测值,按照赫尔默特方差分量估计模型进行估计即可。
1.第一次平差(预平差) (1)第一次定权设"±==5.10βσσ,则(无量纲)1220==ββσσP ,)(56.00.25.12222220秒===S s P σσ(2)计算近似坐标使用余切公式由A B 、和B C 、分别计算D 近似坐标,然后取平均值作为近似坐标;由D C 、和A D 、分别计算E 近似坐标,然后取平均值作为近似坐标。
计算结果为,,;,m Y m X m Y m X D E D D 055.2944969.663552.2475923.56560000==== (3)计算误差方程的b a 、系数(见表10-3、表10-4) 方位角改正数方程:j kj k j j kj k j i kj k j i kj k j k j yS x S y S x S ˆcos 65.2062ˆsin 65.2062ˆcos 65.2062ˆsin 65.206200000000ααααδα⨯+⨯-⨯-⨯=系数量纲为:厘米秒 边长误差方程:k j k j S j k j j k j j k j j k j S l y x y x V -++--=ˆsin ˆcos ˆsin ˆcos 0000αααα(系数无量纲)(4)误差方程组成(见表10-5)角度误差方程:设编号为i 的角度,测站点点号为j ,第一照准点点号为h ,第二照准点点号为k ,则角度误差方程按下式组成i k k j k k j h h j h h j j h j k j j h j k j i h j k j i l y b x a y b x a y b b xa a l v ---++-+-=--=ˆˆˆˆˆ)(ˆ)(δαδα 其中).(00ih ik i i L l αα--=组成结果列于表7-5 边长误差方程:设编号为i 的观测边长,两端点点号为j 和k ,则角度误差方程按下式组成i i S j k j j k j j k j j k j S l y x y x V -++--=ˆsin ˆcos ˆsin ˆcos 0000αααα(系数无量纲).0i i i S S l -=表10-5 误差方程组成表根据表10-5,可得到⎪⎭⎪⎬⎫-=-=-=P l xB V P l x B V P l x B V ˆˆˆ22221111 其中12,12114,121,0.22-0.260.080.39-0.41-0.040.330.35-0.190.30-0.410.04--0.070.180.410.040.410.04-0.150.84--0.34-0.22-0.260.8000-0.080.39-000.640.6400-0.560.25-000.260.8-000.560.2500-0.820.55E P B =⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛=,6,6224,6256.0,0.09-1.00-0.091.000.55-0.8300-0.77-0.640000-0.980.21000.410.91-000.950.31E P B =⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛= ⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫⎝⎛=212,66,12118,182100,P P P B B B(5)法方程组及解利用表10-5中误差方程数据组成法方程 0ˆ=-W x N 其中⎪⎪⎪⎪⎪⎭⎫⎝⎛== 1.0472 0.0647 -0.2019 0.3471- 0.0647 1.4168 0.0184 0.8618- -0.2019 0.0184 3.4667 0.2814- -0.3471-0.8618-0.2814 4.3548PB B N T⎪⎪⎪⎪⎪⎭⎫ ⎝⎛== 2.2917- 16.2824- 0.5436 4.0296Pl B W T ,⎪⎪⎪⎪⎪⎭⎫⎝⎛=-0.99520.00510.06480.08450.00510.80270.00900.15980.06480.00900.29430.02600.08450.15980.02600.26971N ⎪⎪⎪⎪⎪⎭⎫ ⎝⎛==- 2.2917-16.2824- 0.5436 4.0296ˆ1W N x bb(6)改正数计算()3.562.332.09-0.660.89-1.130.471.98-0.311.660.61- 1.751=V() 0.161.07-3.91-2.73-0.27- 1.15-2=V(7)进行赫尔默特估计⎪⎪⎪⎪⎪⎭⎫⎝⎛=-0.99520.00510.06480.08450.00510.80270.00900.15980.06480.00900.29430.02600.08450.15980.02600.26971N ⎪⎪⎪⎪⎪⎭⎫⎝⎛==0.99520.00510.06480.08450.00510.80270.00900.15980.06480.00900.29430.02600.08450.15980.02600.26971111B P B N T⎪⎪⎪⎪⎪⎭⎫⎝⎛== 0.5060 0.0301- 0.0045-0.0504 0.0301- 1.1752 0.05040.5600- 0.0045-0.0504 1.14190.2097- 0.05040.5600-0.2097- 1.10222222B P B N T组成估计方程θθW S =⨯⨯1222ˆ 式中⎥⎦⎤⎢⎣⎡+-+-=----------)()(2)()()()(21212122121112111111111N N N N tr N N tr n N N N N tr N N N N tr N N N N tr N N tr n S []T202201ˆˆˆσσθ= []TT T V P V V P V W 222111=θtr(N 1N -1)2.1012 tr(N 2N -1) 1.8988根据以上数据,求得⎪⎪⎭⎫ ⎝⎛=3417.37595.07595.01394.9S ,⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛=18096.1442301.35111111V PV V P V W T T θ 估计方程⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛18096.1442301.35ˆˆ3417.37595.07595.01394.9202201σσ解得⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛-42747.359103.318096.1442301.353417.37595.07595.01394.9ˆˆ12020S σσβ 两者之比:0.9544532第二次平差(1)计算测角和测边的方差估值由第一次平差求得的角度和边长对应的单位权方差估值,计算角度观测值和边长观测值的方差,公式为SSS P P 1ˆˆ1ˆˆ202202σσσσβββ==, 如果为不等精度观测值,则计算式为12020,12020,ˆˆˆˆ2211--====S P Q D P Q D S SS S n n SS n n σσσσβββββββ,从而求得12048.656.0142747.31ˆˆ59103.31ˆ1ˆˆ20220202=⨯===⨯==S SS P P σσσσσββββ,(2)第二次定权令220ˆβσσ=则59.012048.659103.3ˆ1ˆ220220=====S S P P σσσσββ,(3)求第二次平差的法方程、V 1T P 1V 1、V 2TP 2V 2解得V 1TP 1V 1=35.9089,V 2TP 2V 2=13.70754 (7)进行赫尔默特估计根据以上数据,求得⎪⎪⎭⎫ ⎝⎛=2988.37627.07627.01757.9S ,⎪⎪⎭⎫⎝⎛=⎪⎪⎭⎫ ⎝⎛=7075.139089.35111111V P V V P V W T T θ 估计方程⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛7075.139089.35ˆˆ2988.37627.07627.01757.9202201σσ 解得⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛-4729723.35718162.37075.139089.352988.37627.07627.01757.9ˆˆ12020S σσβ 两者之比为:1:0.9723273.第三次平差(1)计算测角和测边的方差估值由第二次平差求得的角度和边长对应的单位权方差估值,计算角度观测值和边长观测值的方差,公式为SSS P P 1ˆˆ1ˆˆ202202σσσσβββ==, 从而求得886393729.559.014729723.31ˆˆ5718162.31ˆ1ˆˆ20220202=⨯===⨯==S SS P P σσσσσββββ,(2)第三次定权 令220ˆβσσ=则61.0886393729.55718162.3ˆ1ˆ220220=====S S P P σσσσββ,(3)求第三次平差的法方程、V 1T P 1V 1、V 2TP 2V 2解得111222(7)进行赫尔默特估计根据以上数据,求得⎪⎪⎭⎫ ⎝⎛=2715.37646.07646.01993.9S ,⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛=41716.1321996.36111111V P V V P V W T T θ V 1T P 1V 1 V 2T P 2V 236.21996 13.41716V 1T P 1V 1=36.21996,V 2T P 2V 2=13.41716估计方程⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛41716.1321996.36ˆˆ2715.37646.07646.01993.9202201σσ 解得⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛-502829.355947.341716.1321996.362715.37646.07646.01993.9ˆˆ12020S σσβ 即502829.3ˆ55947.3ˆ2020==S σσβ,两者之比为:0.9840871ˆˆ2020::=S σσβ4.第四次平差(1)计算测角和测边的方差估值由第三次平差求得502829.3ˆ55947.3ˆ2020==S σσβ, 742342623.561.01502829.31ˆˆ55947.31ˆ1ˆˆ20220202=⨯===⨯==S SS P P σσσσσββββ,(2)第四次定权 令220ˆβσσ=则62.0742342623.555947.3ˆ1ˆ220220=====S S P P σσσσββ,(3)求第四次平差的法方程、V 1TP 1V 1、V 2TP 2V 2解得V 1TP 1V 1=36.37183,V 2TP 2V 2=13.27887 (7)进行赫尔默特估计根据以上数据,求得⎪⎪⎭⎫ ⎝⎛= 3.25820.76550.76559.2109S ,⎪⎪⎭⎫⎝⎛=⎪⎪⎭⎫ ⎝⎛=13.2788736.37183111111V P V V P V W T T θ 估计方程⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛13.2788736.37183ˆˆ3.25820.76550.76559.2109202201σσ 解得⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛- 3.5176053.5534413.2788736.371833.25820.76550.76559.2109ˆˆ12020S σσβ 即3.517605ˆ3.55344ˆ2020==S σσβ, 两者之比为:0.9899150.9899151ˆˆ2020::=S σσβ 5.第五次平差(1)计算测角和测边的方差估值由第四次平差求得673556452.562.013.5176051ˆˆ3.553441ˆ1ˆˆ20220202=⨯===⨯==S SS P P σσσσσββββ,(2)第四次定权 令220ˆβσσ=则63.0673556452.53.55344ˆ1ˆ220220=====S S P P σσσσββ,(3)求第五次平差的法方程、V 1TP 1V 1、V 2TP 2V 2解得111222(7)进行赫尔默特估计S -1 W 0.1106 -0.0261 35.42301 -0.0261 0.3143 14.18096S9.2224 0.7662 0.7662 3.2451根据以上数据,求得⎪⎪⎭⎫ ⎝⎛= 3.24510.76620.76629.2224 S ,⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛=14.1809635.42301111111V P V V P V W T T θ 估计方程⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛14.1809635.42301ˆˆ3.24510.76620.76629.2224 202201σσ 解得⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛- 3.5322813.54750214.1809635.423013.24510.76620.76629.2224 ˆˆ12020S σσβ 即3.532281ˆ3.547502ˆ2020==S σσβ, 两者之比为:0.9899150.9957091ˆˆ2020::=S σσβ 6.第六次平差(1)计算测角和测边的方差估值由第五次平差求得606795238.563.013.5322811ˆˆ3.5475021ˆ1ˆˆ20220202=⨯===⨯==S SS P P σσσσσββββ,(2)第wu 次定权令220ˆβσσ=则63.0606795238.53.547502ˆ1ˆ220220=====S S P P σσσσββ,可以看出,经过5次迭代计算,权已稳定,因此,可取第5次平差结果作为最后结果,已没有必要再继续做下去。