机器人打磨动力头
- 格式:pdf
- 大小:96.10 KB
- 文档页数:2
49机器人打磨步骤
(手动更换打磨头)
1、打开总电源,系统上电,开关打开
2、工人运用吊具将工件吊到夹具相应位置
3、解除机器人急停,点动按钮使机器人运动到更换打磨头架子旁边,急停,工人换上打磨头,打开气路使打磨头旋转
4、点动第一步打磨程序,第一步打磨完成,关闭气路
5、点动按钮使机器人运动到更换打磨头架子旁边,急停,工人换上打磨头,点动按钮打开气路使打磨头旋转
6、点动第二步打磨程序,第二步打磨完成,关闭气路
7、点动按钮使机器人运动到更换打磨头架子旁边,拍下急停,工人换上打磨头
8、工人运用吊具将工件翻转,并放到夹具相应位置
9、点动按钮打开气路使打磨头旋转
10、点动第三步打磨程序,第三步打磨完成,关闭气路
11、点动按钮使机器人运动到更换打磨头架子旁边,急停,工人换上打磨头,点动按钮打开气路使打磨头旋转
12、点动第四步打磨程序,第四步打磨完成,关闭气路
13、点动按钮使机器人运动到更换打磨头架子旁边卸下打磨头
14、点动机器人程序,使机器人回到初始位置,急停
15、工人将工件用吊具将工件放到指定位置
16、打磨完成
17、重复
电气设计如下:
一、重复启停和危险作业必须安装光幕或类似保护;光幕保护后,任何物体必须静止;第四步运行后才可工作。
二、气路控制需要电磁阀控制;
三、启动控制和急停控制和机器人连锁;不需要通讯,选几个控制点即可。
四、用脚踏进行下一步工作;(根据现场需要)
五、PLC和触摸屏为可选件;选用S7-200系列和一个小的触摸屏;
六、。
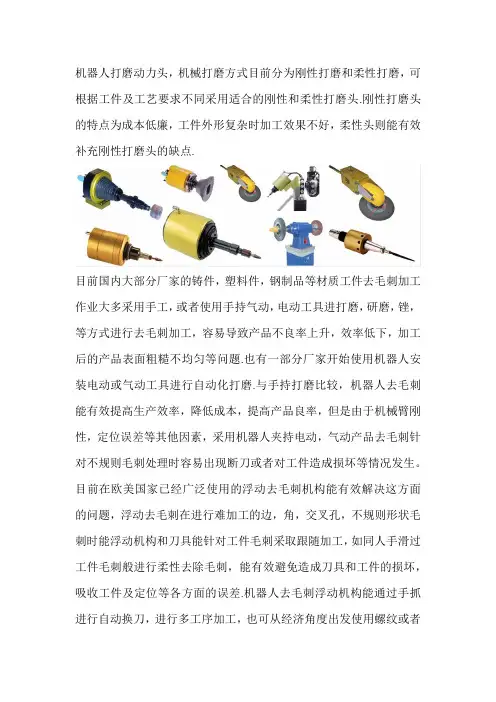
机器人打磨动力头,机械打磨方式目前分为刚性打磨和柔性打磨,可根据工件及工艺要求不同采用适合的刚性和柔性打磨头.刚性打磨头的特点为成本低廉,工件外形复杂时加工效果不好,柔性头则能有效补充刚性打磨头的缺点.
目前国内大部分厂家的铸件,塑料件,钢制品等材质工件去毛刺加工作业大多采用手工,或者使用手持气动,电动工具进打磨,研磨,锉,等方式进行去毛刺加工,容易导致产品不良率上升,效率低下,加工后的产品表面粗糙不均匀等问题.也有一部分厂家开始使用机器人安装电动或气动工具进行自动化打磨.与手持打磨比较,机器人去毛刺能有效提高生产效率,降低成本,提高产品良率,但是由于机械臂刚性,定位误差等其他因素,采用机器人夹持电动,气动产品去毛刺针对不规则毛刺处理时容易出现断刀或者对工件造成损坏等情况发生。
目前在欧美国家已经广泛使用的浮动去毛刺机构能有效解决这方面的问题,浮动去毛刺在进行难加工的边,角,交叉孔,不规则形状毛刺时能浮动机构和刀具能针对工件毛刺采取跟随加工,如同人手滑过工件毛刺般进行柔性去除毛刺,能有效避免造成刀具和工件的损坏,吸收工件及定位等各方面的误差.机器人去毛刺浮动机构能通过手抓进行自动换刀,进行多工序加工,也可从经济角度出发使用螺纹或者
其他方式与机器人连接,同时CNC机床或者定制机床上也可方便的使用该浮动机构.。
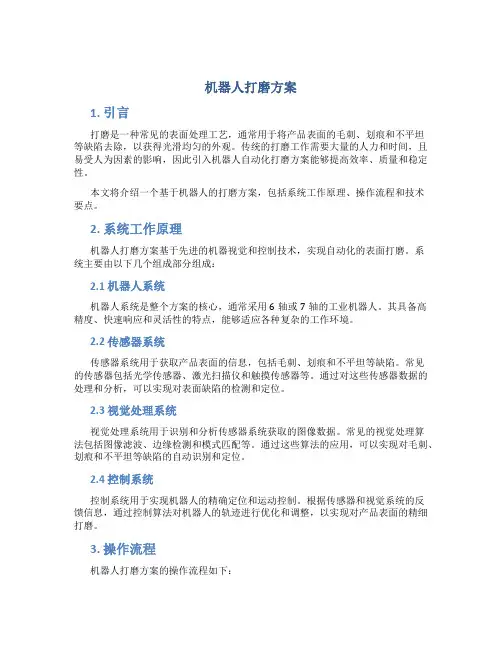
机器人打磨方案1. 引言打磨是一种常见的表面处理工艺,通常用于将产品表面的毛刺、划痕和不平坦等缺陷去除,以获得光滑均匀的外观。
传统的打磨工作需要大量的人力和时间,且易受人为因素的影响,因此引入机器人自动化打磨方案能够提高效率、质量和稳定性。
本文将介绍一个基于机器人的打磨方案,包括系统工作原理、操作流程和技术要点。
2. 系统工作原理机器人打磨方案基于先进的机器视觉和控制技术,实现自动化的表面打磨。
系统主要由以下几个组成部分组成:2.1 机器人系统机器人系统是整个方案的核心,通常采用6轴或7轴的工业机器人。
其具备高精度、快速响应和灵活性的特点,能够适应各种复杂的工作环境。
2.2 传感器系统传感器系统用于获取产品表面的信息,包括毛刺、划痕和不平坦等缺陷。
常见的传感器包括光学传感器、激光扫描仪和触摸传感器等。
通过对这些传感器数据的处理和分析,可以实现对表面缺陷的检测和定位。
2.3 视觉处理系统视觉处理系统用于识别和分析传感器系统获取的图像数据。
常见的视觉处理算法包括图像滤波、边缘检测和模式匹配等。
通过这些算法的应用,可以实现对毛刺、划痕和不平坦等缺陷的自动识别和定位。
2.4 控制系统控制系统用于实现机器人的精确定位和运动控制。
根据传感器和视觉系统的反馈信息,通过控制算法对机器人的轨迹进行优化和调整,以实现对产品表面的精细打磨。
3. 操作流程机器人打磨方案的操作流程如下:1.加载产品:将待打磨的产品加载到机器人工作区域,确保产品的稳定性和安全性。
2.图像识别:机器人通过视觉系统采集产品表面的图像数据,并进行图像处理和分析。
通过算法识别和定位表面缺陷。
3.运动规划:根据识别到的缺陷位置和机器人的工作范围,进行机器人的路径规划,在保证安全的前提下,实现机器人的准确定位。
4.打磨操作:机器人根据路径规划的结果,通过控制系统驱动工具执行打磨操作,对产品表面上的缺陷进行去除,直到满足打磨要求。
5.检测和调整:在打磨过程中,机器人会不断地对表面进行检测,及时获取实时的打磨情况。
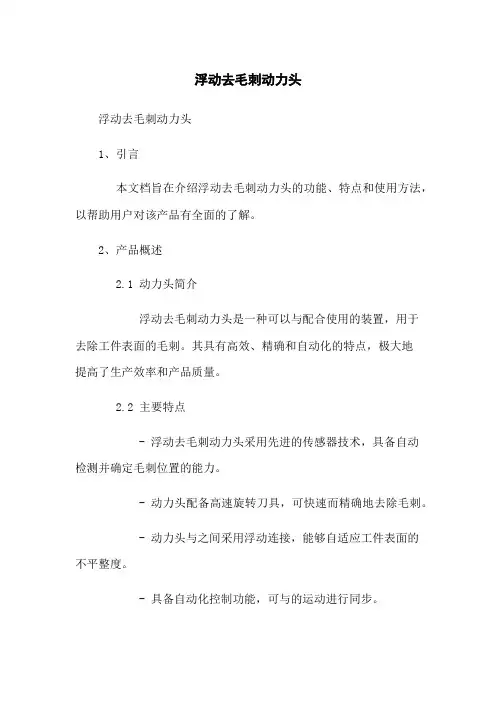
浮动去毛刺动力头浮动去毛刺动力头1、引言本文档旨在介绍浮动去毛刺动力头的功能、特点和使用方法,以帮助用户对该产品有全面的了解。
2、产品概述2.1 动力头简介浮动去毛刺动力头是一种可以与配合使用的装置,用于去除工件表面的毛刺。
其具有高效、精确和自动化的特点,极大地提高了生产效率和产品质量。
2.2 主要特点- 浮动去毛刺动力头采用先进的传感器技术,具备自动检测并确定毛刺位置的能力。
- 动力头配备高速旋转刀具,可快速而精确地去除毛刺。
- 动力头与之间采用浮动连接,能够自适应工件表面的不平整度。
- 具备自动化控制功能,可与的运动进行同步。
2.3 主要应用领域浮动去毛刺动力头广泛应用于金属加工、汽车制造、航空航天等领域,特别适用于对工件表面进行高效、精确去毛刺的场景。
3、使用方法3.1 前期准备在使用浮动去毛刺动力头之前,需先将其与进行适配和安装。
确保连接稳固,并进行相应的调试和测试。
3.2 正式操作- 将待处理的工件放置在工作平台上,并确保固定牢靠。
- 启动,并通过控制面板或程序控制完成工件的移动和定位。
- 使用操作浮动去毛刺动力头,将刀具对准毛刺位置。
- 按下启动按钮,刀具开始旋转并进行去毛刺的操作。
- 完成去毛刺后,停止和动力头的运动,取出处理完的工件。
4、附件本文档涉及的附件包括:- 浮动去毛刺动力头技术参数表- 浮动去毛刺动力头安装示意图- 浮动去毛刺动力头使用说明书5、法律名词及注释- 浮动连接:指通过一定的机构或装置实现两个物体间的连接,并具有能够自适应表面不平整度的能力。
- 毛刺:指工件表面上的突出或粗糙部分,通常由工艺加工过程中遗留的材料或其他因素引起。
- 自动化控制:指通过计算机或其他控制设备对机器、设备或系统进行控制和操作的一种方式。

什么叫打磨机器人打磨机器人是从事打磨的工业机器人打磨机器人什么叫打磨机器人打磨机器人是从事打磨的工业机器人。
打磨机器人,主要由工业机器人本体和打磨机具、抓手等外围设备组成,通过系统集成,由总控制电柜将机器人和外围设备的软硬件连接起来,统一协调,实现各种打磨功能。
机器人打磨主要有两种方式:一种是通过机器人末端执行器夹持打磨工具,主动接触工件,工件相对固定不动,因此这种打磨机器人可称为工具主动型打磨机器人;另一种是机器人末端执行器夹持工件,通过工件贴近接触去毛刺机具设备,机具设备相对固定不动,因此这种打磨机器人也称为工件主动打磨机器人。
打磨机器人的基座和执行机构,包括臂部、腕部和手部,还包括行走机构。
打磨机器人系统集成一般采用6轴机器人,机器人有6个自由度,因此工业机器人有类似人的行走腰转,大臂小臂伸缩,手腕旋转,手爪夹持等功能。
打磨机器人的第1关节实现末端执行器前后移动,第2关节实现末端执行器的左右移动,第3关节实现末端执行器的上下移动,第4-6关节实现末端执行器的姿态调整。
这样打磨机器人就可以像人一样通过变换身体和手腕姿态,完成一系列的打磨工作。
打磨机器人控制系统能按照输入程序对驱动系统和执行机构发出指令信号、进行控制。
因此打磨机器人通过示教和离线编程,控制打磨机器人位置、腰部姿态、腕部角度和爪手位置,充分满足各类工件的不同部位,完成打磨、抛光、去毛刺的各种工艺加工。
打磨机器人单元布局图打磨机器人替代人工的优越性通过打磨机器人的系统集成,可以建成一个机器人打磨单元(工作站)。
打磨机器人的系统组态,通过ERP技术应用,可以实现打磨的自动化工厂。
不仅机器人替代人工打磨,同时机器人还能完成打磨的上下道工序工作,包括上料工作的输送,加工过程中的工艺工序转换工件搬运等一系列工作。
(一)、人工打磨缺点人工打磨就是通过人手把握打磨工具完成工件打磨、抛光、去毛刺加工;或者人手把握工件在打磨机具上完成打磨、抛光、去毛刺加工。
![一种多功能打磨头总成及其组成的机器人打磨系统[实用新型专利]](https://uimg.taocdn.com/f5310a0b524de518974b7dd1.webp)
专利名称:一种多功能打磨头总成及其组成的机器人打磨系统专利类型:实用新型专利
发明人:陈才,杨伦,张开炫,庹奎,焦志勇,杨海滨,杨林,郑登华申请号:CN201720835762.2
申请日:20170711
公开号:CN207206182U
公开日:
20180410
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种多功能打磨头总成及其组成的机器人打磨系统,所述多功能打磨头总成包括底座、立柱和多个气动打磨机;所述底座水平设置,所述立柱垂直固定在所述底座上端,所述立柱的上端通过连接件与机器人或机械臂连接;多个所述气动打磨机分别水平固定在所述底座的上端或下端,所述气动打磨机的打磨部分别伸至所述底座的外侧。
所述打磨系统在由上述多功能打磨头总成、机器人、控制单元以及来件表面检测单元和压力感应器组成,所述来件表面检测单元安装在所述打磨头总成的底座上。
本实用新型的有益效果在于,工件品质高、均一性强、节约成本、生产效率高等。
申请人:重庆华数机器人有限公司
地址:400714 重庆市北碚区水土高新技术产业园云汉大道5号附69号
国籍:CN
代理机构:北京轻创知识产权代理有限公司
代理人:赖丽娟
更多信息请下载全文后查看。
机器人打磨动力头,机械打磨方式目前分为刚性打磨和柔性打磨,可根据工件及工艺要求不同采用适合的刚性和柔性打磨头.刚性打磨头的特点为成本低廉,工件外形复杂时加工效果不好,柔性头则能有效补充刚性打磨头的缺点.
目前国内大部分厂家的铸件,塑料件,钢制品等材质工件去毛刺加工作业大多采用手工,或者使用手持气动,电动工具进打磨,研磨,锉,等方式进行去毛刺加工,容易导致产品不良率上升,效率低下,加工后的产品表面粗糙不均匀等问题.也有一部分厂家开始使用机器人安装电动或气动工具进行自动化打磨.与手持打磨比较,机器人去毛刺能有效提高生产效率,降低成本,提高产品良率,但是由于机械臂刚性,定位误差等其他因素,采用机器人夹持电动,气动产品去毛刺针对不规则毛刺处理时容易出现断刀或者对工件造成损坏等情况发生。
目前在欧美国家已经广泛使用的浮动去毛刺机构能有效解决这方面的问题,浮动去毛刺在进行难加工的边,角,交叉孔,不规则形状毛刺时能浮动机构和刀具能针对工件毛刺采取跟随加工,如同人手滑过工件毛刺般进行柔性去除毛刺,能有效避免造成刀具和工件的损坏,吸收工件及定位等各方面的误差.机器人去毛刺浮动机构能通过手抓进行自动换刀,进行多工序加工,也可从经济角度出发使用螺纹或者
其他方式与机器人连接,同时CNC机床或者定制机床上也可方便的使用该浮动机构.。