EPSON机械手导入培训(56页)
- 格式:ppt
- 大小:7.79 MB
- 文档页数:10


EPSONROBOT导入培训一、引言随着工业4.0时代的到来,工业已逐渐成为制造业的重要组成部分。
EPSONROBOT作为全球领先的工业品牌,凭借其高精度、高速度、高稳定性等优势,在各个领域得到了广泛应用。
为了更好地推动我国制造业的转型升级,提高生产效率,降低生产成本,本企业决定引入EPSONROBOT,并开展相关培训工作。
二、培训目标1.了解EPSONROBOT的基本原理、性能特点及适用范围。
2.掌握EPSONROBOT的操作方法、编程技巧及维护保养知识。
3.培养具备EPSONROBOT应用能力的操作人员和技术团队。
4.提高企业生产效率,降低生产成本,提升企业竞争力。
三、培训内容1.EPSONROBOT产品介绍介绍EPSONROBOT的产品线、性能特点及应用领域。
分析EPSONROBOT与其他品牌的优缺点。
2.EPSONROBOT基本原理介绍EPSONROBOT的机械结构、控制系统及传感器等组成部分。
阐述EPSONROBOT的工作原理及运动学模型。
3.EPSONROBOT操作与编程介绍EPSONROBOT的操作界面及常用功能。
讲解EPSONROBOT的编程语言及编程方法。
演示EPSONROBOT在实际生产中的应用案例。
4.EPSONROBOT维护保养介绍EPSONROBOT的日常检查、维护及保养方法。
分析EPSONROBOT常见故障及排除方法。
5.EPSONROBOT安全操作介绍EPSONROBOT的安全操作规程及注意事项。
分析EPSONROBOT在使用过程中可能存在的安全隐患及预防措施。
四、培训方式1.理论培训:采用PPT、视频等形式进行讲解,帮助学员掌握EPSONROBOT的基本原理、操作方法及编程技巧。
2.实践操作:安排学员在EPSONROBOT上进行实际操作,巩固所学知识,提高操作技能。
3.案例分析:分析EPSONROBOT在实际生产中的应用案例,帮助学员了解EPSONROBOT在不同场景下的应用方法。


01 EPSONChapter1980年代1990年代2000年代2010年代至今工业制造医疗卫生智慧城市教育培训01020304高精度定位技术灵活编程与调试技术高速运动控制技术智能化与自主化技术EPSON 机器人技术特点02 EPSONChapter控制器与执行器控制器执行器传感器与感知系统传感器感知系统通过传感器获取的数据,经过处理和分析后,机器人能够感知自身位置、姿态以及周围环境的变化,从而做出相应的决策和动作。
通信与接口技术通信方式接口技术03 EPSONChapter编程语言与开发环境编程语言EPSON机器人主要使用C和Python进行编程,其中C适用于底层控制和实时性能要求高的场景,而Python则适用于快速开发和原型验证。
开发环境推荐使用EPSON提供的官方开发环境,包括编译器、调试器和仿真器等工具,支持Windows和Linux操作系统。
编程规范遵循良好的编程规范,如命名规范、注释规范、代码风格等,有助于提高代码的可读性和可维护性。
程序结构与逻辑控制程序结构逻辑控制异常处理数据处理与算法应用数据处理算法应用性能优化04 EPSONChapter01EPSON机器人启动与关机流程020304机器人坐标系设置与调整机器人运动控制指令详解调试工具使用及常见问题排查基本操作与调试技巧高级功能与应用实例01020304故障诊断与维护保养故障诊断方法与步骤05 EPSONChapter工业自动化生产线集成物料搬运自动化装配线EPSON机器人可负责生产线上的物料搬运任务,如搬运原材料、半成品和成品等,减轻人工搬运负担。
质量检测语音交互EPSON 机器人可集成语音交互功能,实现与家庭成员的语音对话,提供智能家居控制、信息查询等服务。
家庭清洁EPSON 机器人可用于家庭清洁,如扫地、拖地、擦窗等,提高家庭清洁效率。
安全监控EPSON 机器人可搭载摄像头和传感器,实现家庭安全监控,如防盗、防火等。
智能家居服务机器人设计1 2 3编程教育机器人竞赛特殊教育辅助教育培训领域应用探索06 EPSONChapter人工智能技术在机器人领域的应用前景物联网技术在机器人领域的应用前景物联网技术实现机器人与环境的实时感知和交互,提高机器人的适应性和自主性。

epson机械手培训课件汇报人:2023-11-16•机械手概述•epson机械手基本操作•机械手高级操作技巧•机械手编程实例目•epson机械手调试与维护•epson机械手应用案例分析录机械手概述机械手定义机械手特点机械手定义与特点机械手起源机械手发展机械手的历史与发展机械手的应用范围工业领域01医疗领域02其他领域03epson机械手基本操作机械手编程语言简介RAPID编程语言RAPID编程语言基本结构机械手操作流程1. 打开电源,启动机械手控制系统。
2. 连接机械手与计算机,进行系统初始化。
6. 运行程序,观察机械手实际运行情况。
7. 记录数据,分析结果。
机械手操作规范1. 在进行机械手操作前,务必确保机械手及其周边环境的安全性。
2. 请勿在机械手运行时进行维护和调试。
3. 在使用机械手进行生产作业时,请严格按照操作规程执行,避免因误操作导致的事故。
基本指令1. MOVE:移动机械手到指定位置。
2. Pose:设置机械手的姿态(位置、角度)。
4. If5. GOTO1. 运动控制:可以实现直线插补、圆弧插补、旋转等运机械手高级操作技巧运动学基础介绍机械手运动学的基本原理,包括正运动学和逆运动学,以及机械手位姿的描述方法。
动力学基础介绍机械手动力学的基本原理,包括力和运动的关系,以及机械手动力学模型的建立方法。
机械手运动学与动力学基础机械手轨迹规划方法基于几何的轨迹规划介绍基于几何的机械手轨迹规划方法,如直线插补和圆弧插补等。
基于运动的轨迹规划介绍基于运动的机械手轨迹规划方法,如加速度和速度规划等。
介绍机械手速度控制的基本原理,如PID 控制器和模糊控制器等,以及实现方法。
加速度控制介绍机械手加速度控制的基本原理,如加速度限制和冲击限制等,以及实现方法。
速度控制机械手速度与加速度控制VS机械手编程实例确定搬运任务选择合适的机械手编写搬运程序程序调试与优化简单搬运程序编写编写装配程序程序调试与优化分析分拣任务根据任务特点选择适合的传感器型号。




EPSON ROBOT 导入培训EPSON ROBOT 导入培训⒈概述本培训旨在介绍如何使用 EPSON 系统进行导入操作。
通过本培训,您将了解如何正确设置和使用系统,以进行高效的导入任务。
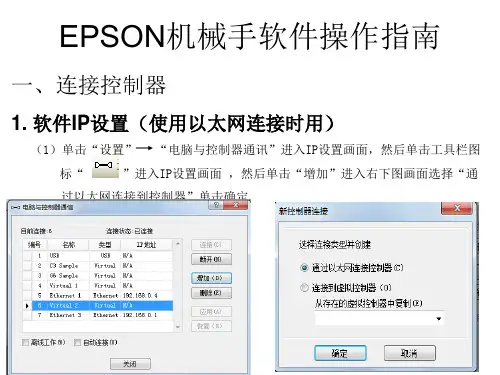
⒉系统要求在开始导入培训之前,请确保满足以下系统要求:●EPSON 系统(包括控制器、臂、传感器等)●PC 或控制台连接系统●适当的操作软件和驱动程序●具备基本的编程和操作知识⒊操作前准备在进行导入任务之前,您需要进行以下操作前准备:⑴系统设置●安装控制器,并将其与臂和传感器连接。
●安装适当的驱动程序和软件,并确保它们与系统兼容。
●对系统进行必要的校准和调试,确保其正常运行。
⑵数据准备在进行导入任务之前,您需要准备以下数据:●导入文件:将要导入到系统中的文件,可以是 CAD 文件、程序文件等。
●导入参数:设置导入过程中的参数,如坐标系、单位等。
⒋导入操作以下是进行导入操作的步骤:⑴打开软件启动控制软件并登录到系统。
⑵创建新项目创建一个新的项目,命名为“导入任务”。
⑶导入文件选择要导入的文件,并将其加载到系统中。
根据文件类型和需求,选择合适的导入选项和参数。
⑷设置导入参数根据导入文件和任务要求,设置合适的导入参数。
这包括坐标系选择、单位设置等。
⑸预览导入结果在进行实际导入之前,预览导入结果。
检查坐标位置、姿态、路径等是否正确。
⑹执行导入操作确认导入参数和预览结果无误后,执行导入操作。
系统将根据设置将文件导入到系统中。
⑺验证导入结果导入完成后,验证导入结果是否与预期一致。
检查系统中的位置、路径等是否正确。
⒌常见问题解答以下是一些常见问题及其解答,以帮助您更好地理解导入操作:⑴为什么导入结果与预期不符?可能是导入参数设置有误,或者文件本身存在问题。
请检查导入参数和文件,并重新执行导入操作。
⑵如何处理导入失败的情况?导入失败可能是由于文件格式不支持或文件损坏。
请确保文件格式正确,并尝试使用其他文件进行导入。
⒍附件本文档涉及的附件包括:●EPSON 系统操作手册●控制软件安装包●示例导入文件⒎法律名词及注释在本文档中有以下法律名词及注释:●:按照 ISO 8373 标准,是可编程的多功能操作设备,可以自动执行一系列任务或操作。
EPSON机械手导入培训(5)一、教学内容本节课我们将学习EPSON机械手的导入培训内容,主要涉及第五章的内容。
其中包括机械手的基本结构、工作原理、操作方法以及编程控制等方面的知识。
二、教学目标1. 让学生了解并掌握EPSON机械手的基本结构和功能。
2. 培养学生对机械手操作的熟练程度。
3. 使学生能够运用编程控制机械手进行简单的操作任务。
三、教学难点与重点重点:EPSON机械手的基本结构、工作原理和操作方法。
难点:编程控制机械手的操作。
四、教具与学具准备教具:EPSON机械手一台、操作面板一个。
学具:学生操作手册、编程软件。
五、教学过程1. 实践情景引入:介绍EPSON机械手的应用领域,如工业生产、教育科研等,让学生对机械手有初步的认识。
2. 基本结构讲解:讲解EPSON机械手的基本结构,包括手臂、关节、末端执行器等部分,并展示实物图片。
3. 工作原理介绍:介绍机械手的工作原理,如动力传输、控制系统等,并通过动画或视频形式展示机械手的工作过程。
4. 操作方法学习:讲解并演示机械手的操作方法,包括关节控制、末端执行器控制等,让学生进行实操练习。
5. 编程控制讲解:介绍机械手的编程控制方法,包括编程语言、指令集等,并通过实例讲解编程控制的过程。
6. 随堂练习:让学生根据编程指令,控制机械手完成特定的操作任务,检验学生对编程控制的理解和掌握程度。
7. 板书设计:机械手基本结构:1. 手臂2. 关节3. 末端执行器机械手工作原理:1. 动力传输2. 控制系统机械手操作方法:1. 关节控制2. 末端执行器控制机械手编程控制:1. 编程语言2. 指令集3. 编程控制过程8. 作业设计题目1:请简述EPSON机械手的基本结构。
答案:EPSON机械手的基本结构包括手臂、关节、末端执行器等部分。
题目2:请解释EPSON机械手的工作原理。
答案:EPSON机械手的工作原理主要包括动力传输和控制系统两个方面。
题目3:请描述如何操作EPSON机械手。
技能培训专题:EPSON机械手软件操作培训一、培训背景机械手在现代工业生产中扮演着越来越重要的角色,EPSON作为机械手领域的一家知名企业,其机械手在可靠性、速度、精度等方面均有很高的表现。
但在实际使用过程中,机械手软件对于操作人员的要求也越来越高,需要专业的技能和知识。
因此,为了提高机械手操作人员的技能水平,增强企业竞争力,公司决定组织EPSON机械手软件操作培训。
二、培训内容1.EPSON机械手和软件的基本概念和构成–介绍EPSON机械手的基本构成和技术参数–介绍EPSON机械手控制系统、编程软件等基本概念2.EPSON机械手的编程–介绍EPSON机械手的编程方式–介绍编程语言的基本结构和语法–调试编程程序,确保机械手能够完成预定任务3.EPSON机械手的操作–介绍EPSON机械手的日常操作–介绍机械手如何完成基本任务4.EPSON机械手的维护和保养–介绍EPSON机械手的日常维护和保养–介绍如何处理常见故障和故障排除三、培训目标通过本次培训,参训人员应该具备以下能力:1.能够了解EPSON机械手和软件的基本构成和技术参数;2.能够使用EPSON机械手编程软件进行机械手程序的编写和调试,并确保机械手能够完成预定任务;3.能够熟练掌握EPSON机械手的日常操作,有效地完成基本任务;4.能够理解EPSON机械手的日常维护和保养要点,掌握如何处理常见故障和故障排除。
四、培训计划本次培训的总计划时长为2天,具体计划安排如下:时间内容第一天上午介绍EPSON机械手和软件第一天下午EPSON机械手的编程第二天上午EPSON机械手的操作第二天下午EPSON机械手的维护和保养五、培训方式本次培训采用线下教学方式,教师采用合理的讲授方式,辅以实例演练和实践操作,让参训人员更好地掌握EPSON机械手软件操作技能。
六、培训效果本次培训结束后,公司将对参训人员进行评估,对达到预期培训目标的人员颁发EPSON机械手软件操作培训结业证书,并且授予操作EPSON机械手的职务。