四自由度搬运机械手液压系统设计
- 格式:pdf
- 大小:205.11 KB
- 文档页数:4
液压机械手液压系统设计
1.动力源选择:液压机械手主要使用液压泵作为动力源。
选择合适的液压泵需要考虑机械手的工作负荷、速度和精度要求。
通常选用可调节排量液压泵以满足工作要求。
2.液压油箱设计:液压油箱作为液压系统的储油和冷却装置,需要具备足够的容量以确保回油顺利、油液冷却和过滤。
油箱还需要考虑油温控制和油液监测装置的设计。
3.液压阀的选型:液压阀是控制液压流动和压力的重要装置,常见的液压阀有单向阀、溢流阀、换向阀等。
液压机械手液压系统设计需要根据运动控制要求选择合适的液压阀。
使用可调节溢流阀可以实现对液压机械手的速度和力矩的精确控制。
4.液压缸设计:液压缸是液压机械手的执行元件,通过液压力来驱动机械手的运动。
液压缸的设计需要考虑缸径、活塞杆直径、行程和最大推力等因素。
合理设计液压缸可以提高机械手的运动速度和精度。
5.液压管路设计:液压管路是液压系统的动力传递和控制通道。
设计合理的液压管路可以减小压力损失和泄漏,并保证液压系统的可靠运行。
液压管路的设计需要考虑液压流量、工作压力和管道材料选择等因素。
6.液压系统控制:液压机械手的运动和工作需要通过液压系统来进行控制。
可以采用手动控制、自动控制或者PLC控制来实现对液压机械手的控制。
控制方式的选择需要根据机械手的工作环境和要求来确定。
以上仅为液压机械手液压系统设计的一些主要考虑因素,具体的设计还需要根据机械手的具体要求和工作条件进行详细的分析和计算。
液压机
械手液压系统设计的目标是实现机械手的高效、精确和可靠的运动和工作,提高生产效率和产品质量。
前言可编程控制器是20世纪70年代以来,在集成电路,计算机技术基础上发展起来的一种新型工业控制设备。
由于具有功能强、可靠性高、配置灵活、使用方便以及体积小、重量轻等优点,国外已广泛应用于自动化控制的各个领域,并已成为现实工业生产自动化的支柱产品。
近年来,国内在PLC技术与产品开发应用方面发展很快,除有许多从国外引进的设备,自动化生产线外,国内的机床设备已越来越多采用PLC控制系统采用控制系统取代传统的继电—接触器控制系统小;价格上能与继电—接触器控制系统竞争;易于在现场变更程序;便于使用、维护、维修;能直接推动电磁阀,接触器与之相当的执行机构;能向中央执行机构;能向中央数据处理系统直接传播数据等。
本课题是基于PLC控制四自由度机械手运行。
工业机械手是一种模仿人体上肢部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,它可以代替手的繁重劳动,改善劳动条件,提高劳动生产率和自动化水平。
有着广阔的发展前途。
本课题通PLC自动控制对机械手实现机械手规定动作并实现回原点、手动方式和自动方式三种工作方式的选择,并对系统进行运行效率分析。
摘要随着工业机械手的进一步发展,其发展将更趋向于人性化、智能化并将在更加广泛的领域得到应用。
机械手是一种模仿人体上肢运动的机器,它能按照预定要求输送工种或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
因而具有强大的生命力,受到人们的广泛重视和欢迎。
工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,提高劳动生产率和自动化水平。
通过对机械制造与自动化大学专科三年的所学知识进行整合,对工业机械手各部分机械结构和功能的论述和分析,确定机械手的工作原理和运动机理。
设计了一种四自由度机械手,采用可编程序控制器(PLC)设计其控制系统,以提高其工作的稳定性能。
关键词:机械手梯形图PLC 电磁阀AbstractWith the further development of industrial robots, and its development tends to be more humane, intelligent and in a wider range of applications. Manipulator is a kind of imitation of the upper body movement machine, it can be scheduled according to request type or holds the automation tool operation of technical equipment, industrial automation, promote the production of industrial production of the further development plays an important role .Manipulator noted extensively and welcome by people for it has powerful vitality. Industrial robots can replace the hands of heavy labor, significantly reduce labor intensity, and improve labor productivity and automation level.Mechanical manufacturing and automation through the junior college for three years to integrate the knowledge of industrial manipulator mechanical structure and function of various parts of exposition and analysis to determine the robot motion principle and mechanism. Design a four-DOF manipulator to enhance the stability of their work for using the programmable logic controller to control system.Keywords: Manipulator Ladder diagram PLC Solenoid valve目录前言 (1)摘要 (2)第一章绪论 (5)1.1 本课题设计的背景 (5)1.2本课题设计的内容 (6)1.3 本课题设计的目的和意义 (7)第二章 PLC的概述 (8)2.1 PLC介绍 (8)2.2 PLC的构成 (9)2.3 PLC 的外部设备 (10)2.4 PLC的工作原理 (10)2.5 PLC的优点 (12)第三章基于PLC的机械手控制方案的确定 (13)3.1 机械手的概述 (13)3.2 采用PLC控制机械手的优点 (13)3.3 机械手设计内容 (13)3.4 PLC的选型 (14)3.5 三菱FX系列的结构功能 (16)第4章功能实现与控制方式 (18)4.1 机械手模型的机能和特性 (18)4.2 夹紧机构 (18)4.3 躯干 (19)4.4 旋转编码盘 (19)第5章控制系统设计 (20)5.1 控制系统硬件设计 (20)5.2 PLC梯形图中的编程元件 (20)5.3 PLC的I/O分配 (21)5.4 机械手控制系统的外部接线图 (22)5.5 控制系统软件设计 (22)致谢 (36)参考文献 (37)附录(指令表) (38)第一章绪论1.1 本课题设计的背景1969年美随着现代工业技术的发展,工业自动化技术越来越高,生产工况也有趋于恶劣的态势,这对一线工人的操作技能也提出了更高的要求,同时操作工人的工作安全也受到了相应的威胁。

液压式四自由度机械手设计-(2)(总57页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--抓料机械手机构设计摘要本课题设计的为抓料机械手。
工业机械手是工业生产的必然产物,它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
因而具有强大的生命力受到人们的广泛重视和欢迎。
实践证明,工业机械手可以代替人手的繁重劳动,显着减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。
工业生产中经常出现的笨重工件的搬运和长期频繁、单调的操作,采用机械手是有效的。
本设计拟开发的上料机械手可在空间抓放物体,动作灵活多样,可代替人工在高温和危险的作业区进行作业,可抓取重量较大的工件此外,它能在高温、低温、深水、宇宙、放射性和其他有毒、污染环境条件下进行操作,更显示其优越性,有着广阔的发展前途。
本课题通过应用AutoCAD等技术对机械手进行结构设计和液压传动原理设计,它能实行自动上料运动,自动搬运棒料。
机械手的运动速度是按着满足生产率的要求来设定。
关键字机械手,AutoCAD ,自动化。
IManipulator grasping mechanism design AbstractThis paper designed for robot grasping the material . Industrial robot is the inevitable product of industrial production, which is a part of human upper limb function mimic conveying the workpiece gripping tools or equipment operation automation technology predetermined requirements of industrial automation , and promote the further development of industrial production plays important role. Which has a strong vitality by people widely valued and welcomed . Practice has proved that industrial robots can replace heavy manual labor , and significantly reduce labor intensity and improve working conditions , improve labor productivity and automation levels. Frequent handling and long term industrial production often bulky workpiece monotonic operation, using the robot to be effective . The design of the proposed development on the feeding robot can pick and place objects in space , flexible action , instead of doing so at high temperatures and can be dangerous operation area , you can grab a greater weight of the workpiece addition, it in heat, cold, deepwater , operating under the universe , radioactive and other toxic pollution environmental conditions , but also demonstrate its superiority , has a broad development prospects.IIThis topic through the application of technologies such as AutoCAD manipulator structural design principles of design and hydraulic transmission , it can implement automatic feeding movement , automatic handling bar . Is the velocity of the robot according to the settings to meet the requirements of productivity .Keywords Robot,AutoCAD,AutomationIII目录摘要............................................... 错误!未定义书签。
搬运用液压机械手控制系统设计液压机械手是一种高度自动化的设备,具有精准的控制和高效的操作能力,在工业生产等领域得到广泛应用。
为了实现机械手的快速准确操作,需要一个稳定可靠的控制系统。
本文将探讨液压机械手控制系统的设计。
一、液压机械手的结构和控制原理液压机械手由四个关节连接而成,可以完成三维空间内的任意动作。
其组成部分包括机械臂、液压系统、传感器等。
其中,液压系统主要由油泵、油箱、液压缸和电磁阀等组成,通过液压缸的伸缩控制机械臂的运动。
机械手的控制原理主要是根据传感器的反馈信号进行控制,通过电磁阀控制液压系统的油液流动,使机械手的各个关节伸缩或旋转,完成所需的动作。
二、液压机械手控制系统的设计1.控制器设计液压机械手的控制器需要具备可编程能力,可通过编程实现机械手的各种动作,同时需要具备完善的故障检测和报警功能。
常见的控制器有单片机控制器和PLC控制器等。
其中,PLC控制器具有更高的稳定性和可靠性,适用于各种复杂的控制任务。
2.传感器设计传感器是液压机械手控制系统中的重要组成部分,主要用于检测机械手的位置、速度、力度等参数,反馈给控制器,用于机械手的实时控制。
常见的传感器有位置传感器、速度传感器和力传感器等。
3.电磁阀设计电磁阀是控制液压系统的重要元件,其稳定性和响应速度对机械手的控制效果有重要影响。
常见的电磁阀有单向阀、双向阀和流量控制阀等,需要根据机械手的控制要求进行选择。
4.液压系统设计液压系统是液压机械手的核心部分,主要由油泵、油箱、液压缸和电磁阀等组成。
其设计需要充分考虑机械手的运动要求和控制要求,保证系统的稳定性和可靠性。
5.编程设计液压机械手的编程需要根据机械手的运动方式和控制要求进行编制。
在编程设计中需要充分考虑指令的精确性和效率,同时也需要考虑故障检测和报警功能。
三、总结液压机械手控制系统是机械手自动化运动的重要保证,其设计需要充分考虑运动控制和传感器反馈等方面的要求,以保证机械手的稳定性和精度。
四自由度机械手设计四自由度机械手是指具有四个独立运动自由度的机械手。
它可以在三维空间内进行灵活的运动和操作,广泛应用于工业制造、医疗护理、服务机器人等领域。
本文将从机械结构设计、运动控制系统、应用领域等方面进行论述,介绍四自由度机械手的设计。
首先,机械结构设计是四自由度机械手设计的关键。
通常,机械手由机械臂、末端执行器、关节驱动装置等组成。
在设计机械臂时,需要考虑结构的刚度、轻量化和尺寸设计等因素。
关节驱动装置可以采用电机驱动、气动驱动或液压驱动等方式,根据具体应用场景选择不同的驱动方式。
末端执行器是机械手最重要的部件之一,其设计要充分考虑操控对象的形状、尺寸和质量等要素。
其次,运动控制系统是确保机械手运动精度和灵活性的关键。
四自由度机械手通常采用闭环控制系统,通过传感器实时反馈机械手的位置、速度和力等信息,通过控制器计算控制命令,控制机械手的运动。
在控制系统设计中,需要考虑传感器的精度、控制器的计算能力和控制算法的设计等因素。
常见的控制算法有PID控制、模糊控制和自适应控制等。
最后,四自由度机械手应用领域广泛。
在工业制造中,机械手可以替代人工完成重复性、危险性和高精度的任务,如焊接、装配和搬运等。
在医疗护理领域,机械手可以用于手术助力、康复训练和辅助生活等。
在服务机器人领域,机械手可以用于家庭服务、餐厅服务和残疾人辅助等。
随着无人驾驶技术的普及,机械手还可以用于车辆维修保养和物流配送等场景。
总之,四自由度机械手的设计涉及机械结构、运动控制系统和应用领域等多个方面。
通过合理设计机械结构,构建高刚性、轻量化的机械手。
运动控制系统的设计保证机械手的运动精度和灵活性。
各个应用领域广泛使用四自由度机械手,提高生产效率和人类生活质量。
随着科技的不断进步,四自由度机械手在未来的应用前景将会更为广阔。
四自由度棒料搬运机械手目录摘要:本设计的机械手是基于提高劳动生产率、产品质量和经济效益,减轻工人劳动强度而设计的。
在某些劳动条件极其恶劣的条件下,工人难以用手工工作,可用本机械手代替人力劳动。
本设计为四自由度圆柱坐标型工业机械手,其工作方向为两个直线方向和两个旋转方向。
本设计中的四自由度棒料搬运机械手,主要是针对质量少于2KG的圆形棒料的搬运。
通过气爪手指的不同选择可满足直径小于60mm的棒料的搬运。
在控制器的作用下,机械手执行将工件从一条流水线拿到另一条流水线并把工件翻转过来这一简单的动作.关键词:四自由度;机械手;搬运;工业机器人The Four Degrees-of-freedom Bar Manipulator DesignsAbstract:This paper design for enhances the labor productivity, product quality, economic efficiency and reduces the worker labor intensity. Some job working at extremely bad environment, that people can’t work in hand, so the robots can replace worker to do it.This scheme introduced a cylindrical robot for four degree of freedom. It is composed of two linear axes and two rotary axis currentThis paper mainly use at the transporting of circular good material that quality is short to2KG. The different fingernail finger was Choice for transporting the good material that diameter is smaller than 60mm.Under controller function the robot move the components from one assembly line to other assembly line and turn over it in space, perform relatively simple takes.Key words: four degrees of freedom; robot; transporting; Industrial robot1 前言1.1 工业机器人的概述与发展机器人(又称机械手,机械人,英文名称:Robot),在人类科技发展史上其来有自,早在三国时代,诸葛亮发明的木牛流马即是古代中国人的智能结晶。
液压式四自由度机械手设计工业机械手是一种模仿人手动作,并按照设定的程序、轨迹和要求代替人手抓取、搬运工件或进行操作的自动化装置。
它的用途十分广泛,对于实现生产过程自动化,提高劳动生产率,减轻工人的劳动强度,保证工人的安全都具有重要的意义,尤其对于那些有毒、危险、多粉尘、深水作业及放射性等恶劣环境和条件下的作业,使用工业机械手更具有显著的优越性。
目前,已经在机械加工、铸造、锻造、冲压生产线和某些操作作业中得到比较广泛的应用。
在热处理、焊接、涂漆及装配等生产中也开始研制和应用。
目前机械手常用的驱动方式有液压驱动、气压驱动及电动机驱动等多种方式,各种驱动方式有其自身的特点,在工业机器人中液压和气压驱动应用很广泛,有些机器人则同时采用多种驱动方式,这都视不同机器人的特点和要求所定。
由于液压驱动具有以下特点:驱动力和驱动力矩较大,速度反应性较好,调速范围较大,多用于要求臂力较大而运动速度较低的工作场合。
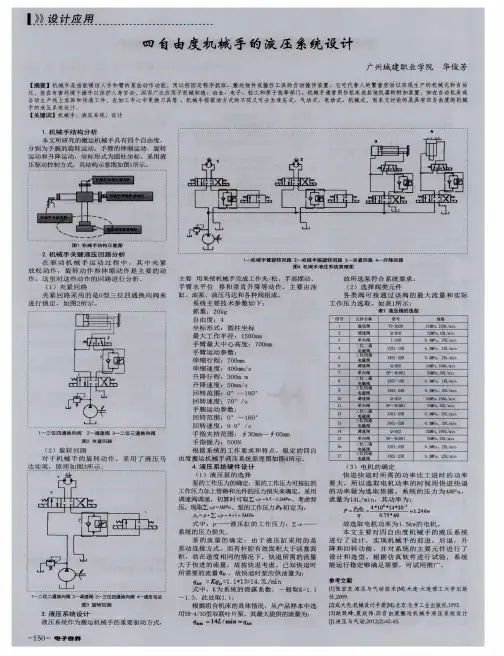
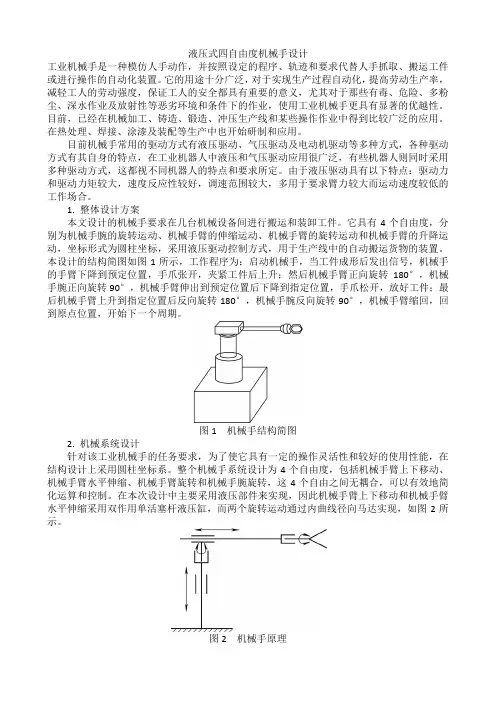
1. 整体设计方案本文设计的机械手要求在几台机械设备间进行搬运和装卸工件。
它具有4个自由度,分别为机械手腕的旋转运动、机械手臂的伸缩运动、机械手臂的旋转运动和机械手臂的升降运动,坐标形式为圆柱坐标,采用液压驱动控制方式,用于生产线中的自动搬运货物的装置。
本设计的结构简图如图1所示,工作程序为:启动机械手,当工件成形后发出信号,机械手的手臂下降到预定位置,手爪张开,夹紧工件后上升;然后机械手臂正向旋转180°,机械手腕正向旋转90°,机械手臂伸出到预定位置后下降到指定位置,手爪松开,放好工件;最后机械手臂上升到指定位置后反向旋转180°,机械手腕反向旋转90°,机械手臂缩回,回到原点位置,开始下一个周期。
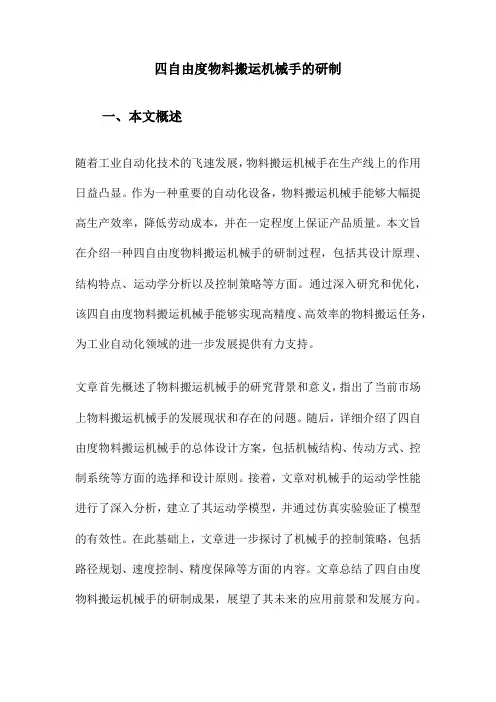
图1机械手结构简图2. 机械系统设计针对该工业机械手的任务要求,为了使它具有一定的操作灵活性和较好的使用性能,在结构设计上采用圆柱坐标系。
整个机械手系统设计为4个自由度,包括机械手臂上下移动、机械手臂水平伸缩、机械手臂旋转和机械手腕旋转,这4个自由之间无耦合,可以有效地简化运算和控制。
四自由度物料搬运机械手的研制一、本文概述随着工业自动化技术的飞速发展,物料搬运机械手在生产线上的作用日益凸显。
作为一种重要的自动化设备,物料搬运机械手能够大幅提高生产效率,降低劳动成本,并在一定程度上保证产品质量。
本文旨在介绍一种四自由度物料搬运机械手的研制过程,包括其设计原理、结构特点、运动学分析以及控制策略等方面。
通过深入研究和优化,该四自由度物料搬运机械手能够实现高精度、高效率的物料搬运任务,为工业自动化领域的进一步发展提供有力支持。
文章首先概述了物料搬运机械手的研究背景和意义,指出了当前市场上物料搬运机械手的发展现状和存在的问题。
随后,详细介绍了四自由度物料搬运机械手的总体设计方案,包括机械结构、传动方式、控制系统等方面的选择和设计原则。
接着,文章对机械手的运动学性能进行了深入分析,建立了其运动学模型,并通过仿真实验验证了模型的有效性。
在此基础上,文章进一步探讨了机械手的控制策略,包括路径规划、速度控制、精度保障等方面的内容。
文章总结了四自由度物料搬运机械手的研制成果,展望了其未来的应用前景和发展方向。
本文的研究成果不仅为四自由度物料搬运机械手的实际应用提供了理论基础和技术支持,也为相关领域的研究人员提供了一定的参考和借鉴。
通过不断优化和完善,四自由度物料搬运机械手将在工业自动化领域发挥更加重要的作用,推动产业升级和转型发展。
二、四自由度物料搬运机械手的总体设计在研制四自由度物料搬运机械手的过程中,总体设计是至关重要的一步。
这一阶段主要完成了机械手的整体架构规划、自由度配置、驱动方式选择以及控制系统的初步设计。
整体架构规划:考虑到物料搬运的多样性和复杂性,我们设计了一种模块化、高度可配置的机械手结构。
该结构包括基座、旋转关节、俯仰关节、伸缩关节和抓取装置等部分。
基座负责固定和支撑整个机械手,旋转关节和俯仰关节则提供了机械手在空间中的大范围移动能力。
伸缩关节则用于微调机械手的位置,以适应不同尺寸和位置的物料。
成人高等教育毕业设计(论文)论文摘要本次毕业设计的题目为四自由度工业机械手的设计。
本设计是根据三年专科所学的课程进行的,主要有:机械零件设计,机械零件图测绘,液压与气动技术,PLC电子编程技术,理论力学,工程力学等。
设计共分为六章,第一章绪论是说明本次毕业设计的目的,意义,研究范围及要达到的技术要求,简述本课题在国内外的发展概况及存在的问题。
第二章总体设计以及总体说明,对工业机械手的工作原理、组成及其种类型式进行介绍,确定整个机械手的总体方案。
第三章工业机械手的机械部分设计,是介绍各部件的选择及相关数据的确定、性能的分析和各参数的计算;第四章工业机械手驱动系统(气动系统)的设计,包括:回路设计,执行元件选择,控制元件选择以及动作顺序表等进行介绍。
第五章工业机械手的电气控制系统的设计,主要介绍了PLC的程序梯形图。
第六章是设计的总结。
在本次的毕业设计中,能顺利的完成,最重要的是由三位优秀的,具有丰富经验的导师王晓初和李克天老师的详细耐心的解说,教导。
而本人也通过《毕业设计指导书》、《机械设计手册》、《可编程序控制器》以及参考其它有关机械手设计的专业书籍,经过十三周的努力终于把此毕业设计编制而成。
关键字:机械手,气动系统,PLC,目录1 绪论―――――――――――――――――――――――――――――――――――--3 1.1 课题设计的论述--――――――――――――――――――――――――――――3 1.1.1 工业机械手的技术概述--――――――――――――――――――――――3 1.1.2现状及国内外发展趋势--―――――――――――――――――――――――4 1.2 工业机械手设计的基本步骤----――――――――――――――――――――――5 2 总体设计――――――――――――――――――――――――――――――――――62.1 设计的基本内容――――――――――――――――――――――――――――――62.1.1总体说明――――――――――――――――――――――――――――――6 2.1.2驱动方式的选择和设计―――――――――――――――――――――――6 2.1.3整体机构的确定--――――――――――――――――――――――――-- 7 3 工业机械手的机械部分设计–--――――――――――――――――――――――8 3.1 工业机械手的规格参数―――――――――――――――――――――――――8 3.2 工业设计手的参数计算――――――――――――――――――――――――--- 83.2.1 手部质量计算―――――――――――――――――――――――――――- 83.2.2 机械手的爪部夹紧气缸的选择―――――――――――――――――――-- 93.2.3 腕部传动气缸的选择―――――――――――――――――――――――-- 103.2.4 伸缩气缸的选择――――――――――――――――――――――――――-- 113.2.5 对伸缩导杆的校核―――――――――――――――――――――――――-- 123.2.6 配重计算―――――――――――――――――――――――――――――-- 133.2.7 升降部分计算--―――――――――――――――――――――――――――143.2.8 对升降导杆的核算――――――――――――――――――――――――--- 153.2.9挠度计算―――――――――――――――――――――――――――――--- 153.2.10转台型齿杆式回转摆动气缸的计算――――――――――――――――-- 164 工业机械手的控制部分设计―――――――――――――――――――――――174.1 回路计算――――――――――――――――――――――――――――――――-- 17 4.2 执行元件选择――――――――――――――――――――――――――――――17 4.3 控制元件选择――――――――――――――――――――――――――――――18 4.4 执行元件用气量的计算和空压机的选择――――――――――――――――――214.5 气动元件的清单―――――――――――――――――――――――――――――224.6动作顺序表―――――――――――――――――――――――――――――――235电气控制系统设计――――――――――――――――――――――――――――25 5.1电气控制方案设计和元件的选择―――――――――――――――――――――25 5.2 PLC控制系统设计及PLC及I/O端口分配图的设计――――――――――――25 5.3 PLC梯形图的设计――――――――――――――――――――――――――――25 5.4 PLC的控制程序――――――――――――――――――――――――――――――25总结致谢参考文献1 绪论1.1 课题设计的论述机械是现代社会进行生产的主要要素之一,机械制造工业是现代工业化国家的基础工业,是我国社会主义现代化的重要领域之一。
液压搬运机械手的设计毕业设计概述设计思路液压搬运机械手的设计需要考虑机械结构的稳定性、足够的搬运能力以及精确的控制手段。
在机械结构设计上,可以采用双臂结构,每个臂都由多个连接杆连接,并通过液压缸控制连接杆的运动。
液压缸可以根据需要进行扩展和收缩,以实现机械手的伸缩功能。
同时,机械手还可以配备夹具设备,以适应不同形状和重量的物体。
在液压系统设计上,需要选择适当的液压元件,如液压缸、液压泵、液压控制阀等。
液压泵负责提供稳定的液压动力,液压控制阀用于控制液压系统的工作状态。
为了提高机械手的搬运能力,可以选择高效的液压缸,并根据需求确定合适的液压缸数量和工作压力。
在控制系统设计上,可以采用电脑控制或PLC控制。
通过编制相应的程序和算法,实现机械手的自动化操作。
控制系统可以实现机械手的定点抓取、移动和放置等功能。
此外,还可以加入传感器设备,用于实时监测和反馈机械手的位置、运动状态等信息,以提高机械手的精确性和安全性。
设计过程首先,需求分析是设计过程的第一步。
需要明确机械手的搬运能力、工作环境、操作要求等。
这些需求将决定机械手的功能和性能指标。
然后,预算计划是设计过程的另一个重要环节。
需要估算机械手所需的材料和设备的成本,并根据预算计划确定设计方向。
接下来,进行机械结构设计。
可以利用CAD软件进行机械结构的建模和分析,确定连接杆和夹具的位置、尺寸和角度。
并通过强度分析和动力学模拟,验证机械结构的可行性和稳定性。
然后,进行液压系统设计。
根据机械手的搬运能力需求,选择合适的液压元件。
可以利用液压系统仿真软件进行液压系统的设计和优化,确保液压系统的工作稳定和有效。
最后,进行控制系统设计。
根据机械手的操作要求,选择合适的控制方式和设备。
可以通过编程和调试,实现机械手的自动化操作和控制。
设计成果结论液压搬运机械手的设计涉及到机械结构、液压系统和控制系统等多个方面。
通过合理的设计思路和设计过程,可以实现一个具有高效、精确和安全的液压搬运机械手。
编号无锡太湖学院毕业设计(论文)题目:四自由度棒料搬运机械手设计信机系机械工程及其自动化专业学号:学生姓名:指导教师:(职称:讲师)(职称:)2013年5月25日无锡太湖学院本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的毕业设计(论文)《四自由度棒料搬运机械手设计》是本人在导师的指导下独立进行研究所取得的成果,除了在毕业设计(论文)中特别加以标注引用、表示致谢的内容外,本毕业设计(论文)不包含任何其他个人、集体已发表或撰写的成果作品。
班级:学号:作者姓名:2013 年5 月25 日无锡太湖学院信机系机械工程及其自动化专业毕业设计论文任务书一、题目及专题:1、题目四自由度棒料搬运机械手设计2、专题二、课题来源及选题依据机器人工程是近二十多年迅速发展起来的,目前已应用与许多生产领域。
由目前的发展状况看,在可预见的将来它将在生产中扮演越来越重要的角色。
本机械手就是基于此并为提高劳动生产率、产品质量和经济效益,减轻工人劳动强度而设计的。
在某些劳动条件极其恶劣的条件下,工人难以用手工工作,可用本机械手代替人力劳动。
在社会不断发展的今天,机器人在工业现场中的应用也越来越广泛,用机器的力量代替人力,而将人类从繁重的体力劳动中解放出来是历史发展的趋势。
三、本设计(论文或其他)应达到的要求:1、机械手的总体设计,包括型式选择、基本参数确定、总体布置与主要结构设计。
并绘制整体装配图。
2、机械手传动机构的设计,包括滚珠丝杠的选择,谐波齿轮减速器参数的确定。
3、机械手各种电机的选择。
包括机械手手臂升降步进电机的选择,机械手底座回转驱动电动机的选择。
4、机械手各气动件的设计计算。
5、设计说明书一份。
6、所有非标零件需画出零件图。
四、接受任务学生:机械92 班姓名五、开始及完成日期:自2012 年11月12日至2013年5 月25日六、设计(论文)指导(或顾问):指导教师签名签名签名教研室主任〔学科组组长研究所所长〕签名系主任签名2013年5月25日摘要在社会不断发展的今天,机器人在工业现场中的应用也越来越广泛,用机器的力量代替人力,而将人类从繁重的体力劳动中解放出来是历史发展的趋势。
机械手液压控制系统设计引言:机械手是一种常见的工业自动化设备,广泛应用于各个领域,如生产线上的物料搬运、组装和加工等。
在机械手中,液压控制系统是至关重要的一部分,通过液压控制系统,可以实现机械手的高效运动控制和力的传递。
本文将介绍一种机械手液压控制系统的设计方案。
一、设计要求1.高效控制:液压控制系统需要具有快速响应,确保机械手的准确定位和稳定运动;2.精确力控制:可以实现对机械手进行精确的力控制,保证对工件的安全操作;3.可靠性:系统需要具有高可靠性,可以长时间运行,减少维护和故障的发生;4.灵活性:系统需要具备一定的灵活性,可以适应不同的工作需求和特殊场景的要求。
二、系统组成2.液压执行元件:液压执行元件将液压能转化为机械能,并完成机械手的运动任务。
常用的液压执行元件有液压缸、液压马达等。
3.控制元件:控制元件用于控制液压执行元件的工作状态和执行机械手的运动控制任务。
常见的控制元件有电磁换向阀、比例阀等。
4.传感器:传感器用于感知机械手和工件的状态,将信号转化为电信号并传输给控制系统,用于监测和控制机械手的运动和力的参数。
常见的传感器有位移传感器、压力传感器等。
5.工作元件:工作元件是机械手完成具体工作任务的部分,如夹爪、工件夹持装置等。
三、系统设计1.液压源的选型:根据机械手的工作需求、液压执行元件的工作压力和流量要求,选用合适的液压泵。
2.液压执行元件的选型:根据机械手的运动方式和工作负载,选用合适的液压缸和液压马达。
3.控制元件的选择:根据机械手的运动模式和控制要求,选择合适的控制元件。
可以采用比例阀、电磁换向阀等控制元件,通过电控系统实现对液压执行元件的精确控制。
4.传感器的应用:根据机械手的工作需求,选择合适的传感器,并在机械手各个关键部位进行布置,以实时监测机械手的运动状态和工作参数。
5.控制系统的设计:设计一个完善的控制系统,包括对液压执行元件的运动控制和力的控制。
可以采用PID控制算法对机械手进行力的闭环控制,提高精度和稳定性。
四自由度搬运机械手的设计毕业论文摘要:机械手作为自动化装置中的重要组成部分,广泛应用于工业生产线、仓储物流等领域。
本论文以四自由度搬运机械手设计为研究对象,对机械手的动力学和控制系统进行分析和优化设计。
通过对机械手的结构设计、动力学建模和控制算法的优化,进一步提高机械手的工作效率和精度。
论文总结了机械手设计中的关键问题,并给出了相应的设计和优化方案。
实验证明,该设计方案在搬运工作中具有较好的性能表现。
关键词:机械手;搬运;动力学;控制系统1.引言机械手作为一种重要的自动化装置,广泛应用于工业生产线、仓储物流等领域,实现了对物体的自动化搬运和装配。
机械手的设计涉及到多学科知识的综合运用,包括机械工程、电子工程、控制科学等。
本论文以四自由度搬运机械手设计为研究对象,对机械手的动力学和控制系统进行分析和优化设计。
2.机械手的结构设计在机械手的结构设计中,考虑到搬运过程中的工作负荷和工作空间的要求,选择了四自由度机械手结构。
该结构由基座、臂架、运动链和机械手末端执行器等部分组成。
基座为机械手提供了稳定的支撑,并具备旋转自由度。
臂架通过关节连接基座和运动链,增加了机械手的活动范围。
运动链通过关节连接臂架和末端执行器,实现了机械手的搬运动作。
3.机械手的动力学建模机械手的动力学建模是机械手设计中的重要步骤,通过建立机械手的运动学和动力学方程,可以预测机械手在搬运过程中的运动轨迹和力学特性。
本论文采用牛顿-欧拉法建立了机械手的动力学方程,并通过计算机仿真验证了动力学模型的准确性。
4.机械手的控制系统设计机械手的控制系统设计是机械手设计中的另一个关键问题,其目标是实现机械手的精确定位和力控制。
本论文采用PID控制算法对机械手的位置和力控制进行了优化设计,并结合机械手的动力学特性进行了参数调节和鲁棒性分析。
实验证明,该控制系统具有较好的性能表现,能够满足机械手在搬运过程中的控制要求。
5.结论通过对四自由度搬运机械手的设计进行了详细分析和优化,本论文提出了一种高效、精确的机械手设计方案。