哈工大2016结构力学考研真题
- 格式:pdf
- 大小:309.21 KB
- 文档页数:8
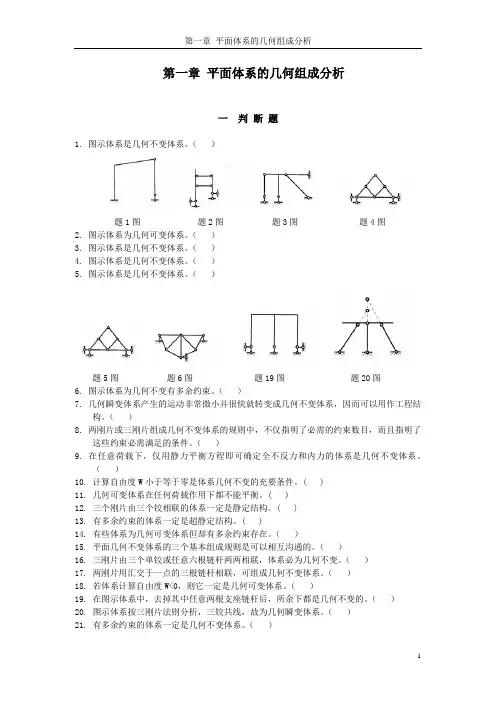
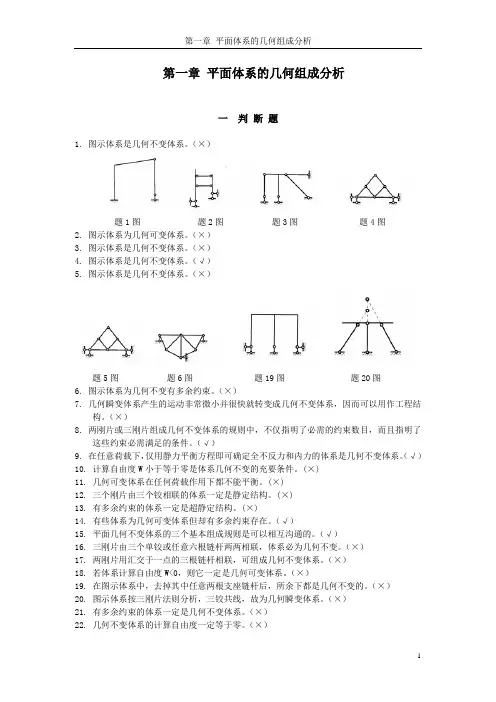
第一章平面体系的几何组成分析一判断题1. 图示体系是几何不变体系。
()题1图题2图题3图题4图2. 图示体系为几何可变体系。
()3. 图示体系是几何不变体系。
()4. 图示体系是几何不变体系。
()5. 图示体系是几何不变体系。
()题5图题6图题19图题20图6. 图示体系为几何不变有多余约束。
()7. 几何瞬变体系产生的运动非常微小并很快就转变成几何不变体系,因而可以用作工程结构。
()8. 两刚片或三刚片组成几何不变体系的规则中,不仅指明了必需的约束数目,而且指明了这些约束必需满足的条件。
()9. 在任意荷载下,仅用静力平衡方程即可确定全不反力和内力的体系是几何不变体系。
()10. 计算自由度W小于等于零是体系几何不变的充要条件。
( )11. 几何可变体系在任何荷载作用下都不能平衡。
( )12. 三个刚片由三个铰相联的体系一定是静定结构。
( )13. 有多余约束的体系一定是超静定结构。
( )14. 有些体系为几何可变体系但却有多余约束存在。
()15. 平面几何不变体系的三个基本组成规则是可以相互沟通的。
()16. 三刚片由三个单铰或任意六根链杆两两相联,体系必为几何不变。
()17. 两刚片用汇交于一点的三根链杆相联,可组成几何不变体系。
()18. 若体系计算自由度W<0,则它一定是几何可变体系。
()19. 在图示体系中,去掉其中任意两根支座链杆后,所余下都是几何不变的。
()20. 图示体系按三刚片法则分析,三铰共线,故为几何瞬变体系。
()21. 有多余约束的体系一定是几何不变体系。
()22. 几何不变体系的计算自由度一定等于零。
()23. 几何瞬变体系的计算自由度一定等于零。
()24. 图中链杆1和2的交点O可视为虚铰。
()题24图二选择题1. 图示体系为:()A.几何不变无多余约束 B.几何不变有多余约束 C.几何常变 D.几何瞬变题1图题2图题3图2. 图示体系为:()A.几何不变无多余约束 B.几何不变有多余约束 C.几何常变 D.几何瞬变3. 图示体系虽有三个多余约束,但为保证其几何不变,哪两根链杆是不能同时去掉的。
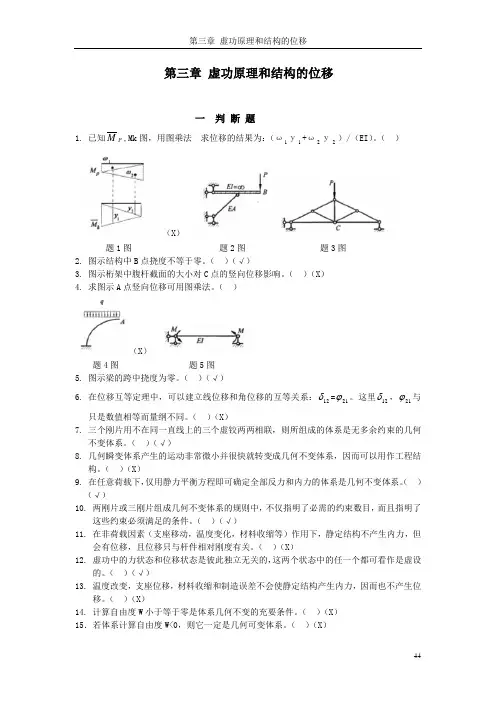
第三章 虚功原理和结构的位移一 判 断 题1. 已知P M ,Mk 图,用图乘法 求位移的结果为:(ω1у1+ω2у2)/(EI )。
( ) (X ) 题1图 题2图 题3图2. 图示结构中B 点挠度不等于零。
( )(√)3. 图示桁架中腹杆截面的大小对C 点的竖向位移影响。
( )(X )4. 求图示A 点竖向位移可用图乘法。
( )(X )题4图 题5图5. 图示梁的跨中挠度为零。
( )(√)6. 在位移互等定理中,可以建立线位移和角位移的互等关系:12δ=21ϕ。
这里12δ,21ϕ与只是数值相等而量纲不同。
( )(X )7. 三个刚片用不在同一直线上的三个虚铰两两相联,则所组成的体系是无多余约束的几何不变体系。
( )(√)8. 几何瞬变体系产生的运动非常微小并很快就转变成几何不变体系,因而可以用作工程结构。
( )(X )9. 在任意荷载下,仅用静力平衡方程即可确定全部反力和内力的体系是几何不变体系。
( )(√)10. 两刚片或三刚片组成几何不变体系的规则中,不仅指明了必需的约束数目,而且指明了这些约束必须满足的条件。
( )(√)11. 在非荷载因素(支座移动,温度变化,材料收缩等)作用下,静定结构不产生内力,但会有位移,且位移只与杆件相对刚度有关。
( )(X )12. 虚功中的力状态和位移状态是彼此独立无关的,这两个状态中的任一个都可看作是虚设的。
( )(√)13. 温度改变,支座位移,材料收缩和制造误差不会使静定结构产生内力,因而也不产生位移。
( )(X )14. 计算自由度W 小于等于零是体系几何不变的充要条件。
( )(X )15.若体系计算自由度W<0,则它一定是几何可变体系。
( )(X )16.平面几何不变体系的三个基本组成规则是可以相互沟通的。
( )(√)17.三刚片由三个单铰或任意六根链杆两两相联,体系必为几何不变。
( )(X )18.图示三铰刚架,EI 为常数,A 铰无竖向位移。
第一章平面体系的几何组成分析一判断题1.图示体系是几何不变体系。
(×)题1图题2图题3图题4图2.图示体系为几何可变体系。
(×)3.图示体系是几何不变体系。
(×)4.图示体系是几何不变体系。
(√)5.图示体系是几何不变体系。
(×)题5图题6图题19图题20图6.图示体系为几何不变有多余约束。
(×)7.几何瞬变体系产生的运动非常微小并很快就转变成几何不变体系,因而可以用作工程结构。
(×)8.两刚片或三刚片组成几何不变体系的规则中,不仅指明了必需的约束数目,而且指明了这些约束必需满足的条件。
(√)9.在任意荷载下,仅用静力平衡方程即可确定全不反力和内力的体系是几何不变体系。
(√)10.计算自由度 W小于等于零是体系几何不变的充要条件。
( × )11.几何可变体系在任何荷载作用下都不能平衡。
( × )12.三个刚片由三个铰相联的体系一定是静定结构。
( × )13.有多余约束的体系一定是超静定结构。
( ×)14.有些体系为几何可变体系但却有多余约束存在。
(√)15.平面几何不变体系的三个基本组成规则是可以相互沟通的。
(√)16.三刚片由三个单铰或任意六根链杆两两相联,体系必为几何不变。
(×)17.两刚片用汇交于一点的三根链杆相联,可组成几何不变体系。
(×)18.若体系计算自由度 W<0,则它一定是几何可变体系。
(×)19.在图示体系中,去掉其中任意两根支座链杆后,所余下都是几何不变的。
(×)20.图示体系按三刚片法则分析,三铰共线,故为几何瞬变体系。
(×)21.有多余约束的体系一定是几何不变体系。
(×)22.几何不变体系的计算自由度一定等于零。
(×)23.几何瞬变体系的计算自由度一定等于零。
(×)24.图中链杆 1 和 2 的交点 O可视为虚铰。
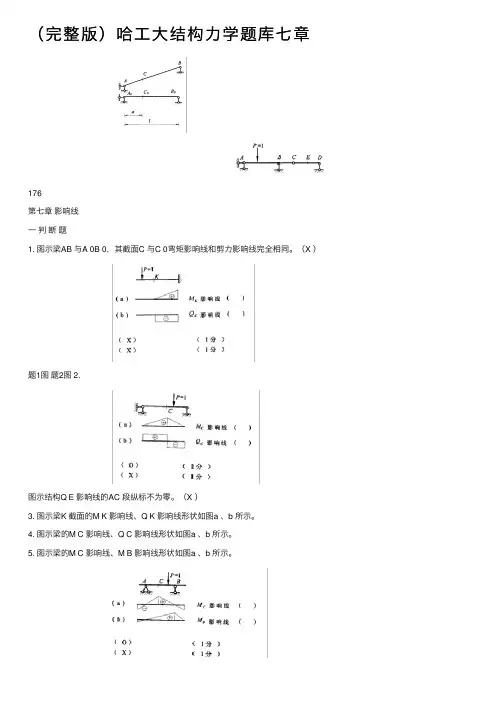
(完整版)哈⼯⼤结构⼒学题库七章176第七章影响线⼀判断题1. 图⽰梁AB 与A 0B 0,其截⾯C 与C 0弯矩影响线和剪⼒影响线完全相同。
(X )题1图题2图 2.图⽰结构Q E 影响线的AC 段纵标不为零。
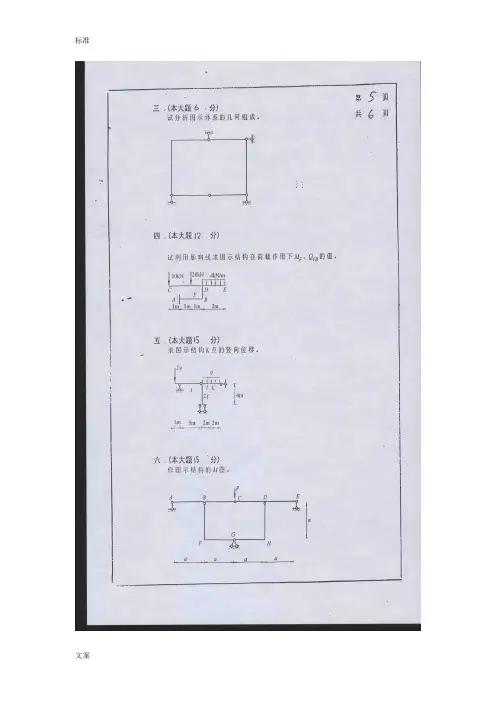
(X )3. 图⽰梁K 截⾯的M K 影响线、Q K 影响线形状如图a 、b 所⽰。
4. 图⽰梁的M C 影响线、Q C 影响线形状如图a 、b 所⽰。
5. 图⽰梁的M C 影响线、M B 影响线形状如图a 、b 所⽰。
1776. 图⽰结构M B 影响线的AB 段纵标为零。
7. 图⽰梁跨中C 截⾯弯矩影响线的物理意义是荷载P=1作⽤在截⾯C 的弯矩图形。
(X ) 8. ⽤静⼒法作静定结构某量值的影响线与⽤机动法作该结构同⼀量值的影响线是不等价的。
(X )9. 求某量值影响线⽅程的⽅法,与恒载作⽤下计算该量值的⽅法在原理上是相同的。
(√) 10. 影响线是⽤于解决活载作⽤下结构的计算问题,它不能⽤于恒载作⽤下的计算。
(X ) 11. 移动荷载是指⼤⼩,指向不变,作⽤位置不断变化的荷载,所以不是静⼒荷载。
(X ) 12. ⽤静⼒法作影响线,影响线⽅程中的变量x 代表截⾯位置的横坐标。
(X )13. 表⽰单位移动荷载作⽤下某指定截⾯的内⼒变化规律的图形称为内⼒影响线。
(√) 14. 简⽀梁跨中截⾯弯矩的影响线与跨中有集中⼒P 时的M 图相同。
(X ) 15. 简⽀梁跨中C 截⾯剪⼒影响线在C 截⾯处有突变。
(√) 16. 绝对最⼤弯矩是移动荷载下梁的各截⾯上最⼤的弯矩。
(√) 17. 静定结构及超静定结构的内⼒影响线都是由直线组成。
(X) 18. 图⽰结构Q C 影响线的CD 段为斜直线。
19. 图⽰结构K 断⾯的剪⼒影响线如图b 所⽰。
(√)178题19图20. ⽤机动法作得图a 所⽰Q B 左结构影响线如图b 。
题20图题21图 21. 图⽰结构a 杆的内⼒影响线如图b 所⽰22. 荷载处于某⼀最不利位置时,按梁内各截⾯得弯矩值竖标画出得图形,称为简⽀梁的弯矩包络图。
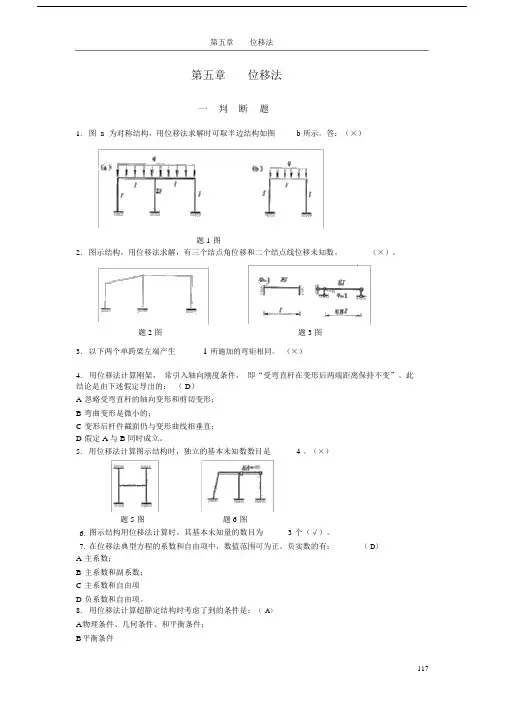
第七章影响线一判断题1. 图示梁AB与A0B0,其截面C与C0弯矩影响线和剪力影响线完全相同。
(X)题1图题2图2. 图示结构Q E影响线的AC段纵标不为零。
(X)3. 图示梁K截面的M K影响线、Q K影响线形状如图a、b所示。
4. 图示梁的M C影响线、Q C影响线形状如图a、b所示。
5. 图示梁的M C影响线、M B影响线形状如图a、b所示。
第七章影响线6. 图示结构M B影响线的AB段纵标为零。
7. 图示梁跨中C截面弯矩影响线的物理意义是荷载P=1作用在截面C的弯矩图形。
(X)8. 用静力法作静定结构某量值的影响线与用机动法作该结构同一量值的影响线是不等价的。
(X)9. 求某量值影响线方程的方法,与恒载作用下计算该量值的方法在原理上是相同的。
(√)10. 影响线是用于解决活载作用下结构的计算问题,它不能用于恒载作用下的计算。
(X)11. 移动荷载是指大小,指向不变,作用位置不断变化的荷载,所以不是静力荷载。
(X)12. 用静力法作影响线,影响线方程中的变量x代表截面位置的横坐标。
(X)13. 表示单位移动荷载作用下某指定截面的内力变化规律的图形称为内力影响线。
(√)14. 简支梁跨中截面弯矩的影响线与跨中有集中力P时的M图相同。
(X)15. 简支梁跨中C截面剪力影响线在C截面处有突变。
(√)16. 绝对最大弯矩是移动荷载下梁的各截面上最大的弯矩。
(√)17. 静定结构及超静定结构的内力影响线都是由直线组成。
(X)18. 图示结构Q C影响线的CD段为斜直线。
19. 图示结构K断面的剪力影响线如图b所示。
(√)题19图20. 用机动法作得图a所示Q B左结构影响线如图b。
题20图题21图21. 图示结构a杆的内力影响线如图b所示22. 荷载处于某一最不利位置时,按梁内各截面得弯矩值竖标画出得图形,称为简支梁的弯矩包络图。
(X)23. 单位力P=1沿图a所示桁架上移动,杆K内力影响线如图b.第七章影响线24. 图为图所示结构Q C右的影响线。
第五章位移法一判断题1.图a为对称结构,用位移法求解时可取半边结构如图 b 所示。
答:(×)题 1 图2.图示结构,用位移法求解,有三个结点角位移和二个结点线位移未知数。
(×)。
题2图题3图3.以下两个单跨梁左端产生 1 所施加的弯矩相同。
(×)4.用位移法计算刚架,常引入轴向刚度条件,即“受弯直杆在变形后两端距离保持不变”。
此结论是由下述假定导出的:( D)A忽略受弯直杆的轴向变形和剪切变形;B弯曲变形是微小的;C变形后杆件截面仍与变形曲线相垂直;D假定 A 与 B 同时成立。
5.用位移法计算图示结构时,独立的基本未知数数目是 4 。
(×)题 5 图题 6 图6.图示结构用位移法计算时,其基本未知量的数目为 3 个(√)。
7.在位移法典型方程的系数和自由项中,数值范围可为正、负实数的有:( D)A主系数;B主系数和副系数;C主系数和自由项D负系数和自由项。
8.用位移法计算超静定结构时考虑了到的条件是:(A)A物理条件、几何条件、和平衡条件;B平衡条件C平衡条件与物理条件D平衡条件与几何条件9.规定位移法的杆端弯矩正负时,对杆端而言,以顺时针为正,对结点则以逆时针为正,这一规定也适合于杆端剪力的符号规定。
(×)10.图 a 对称结构可简化为图( b)来计算。
(×)题10图题11图11.图示结构用位移法求解时,基本未知量个数是相同的(√)12.图示结构用位移法求解时,只有一个未知数(√)题12图题13 图题14图13. 图示结构横梁无弯曲变形,故其上无弯矩。
(×)14.图a对称结构可简化为图b来计算,EI 均为常数。
(×)15.图示结构用位移法求解的基本未知量数目最少为3。
(√)题15图题16图16.图示结构EI=常数,用位移法求解时有一个基本未知量。
(√)。
17.位移法中固端弯矩是当其基本未知量为零时由外界因数所产生的杆端弯矩(√)18.位移法的典型方程与力法的典型方程一样,都是变形协调方程。
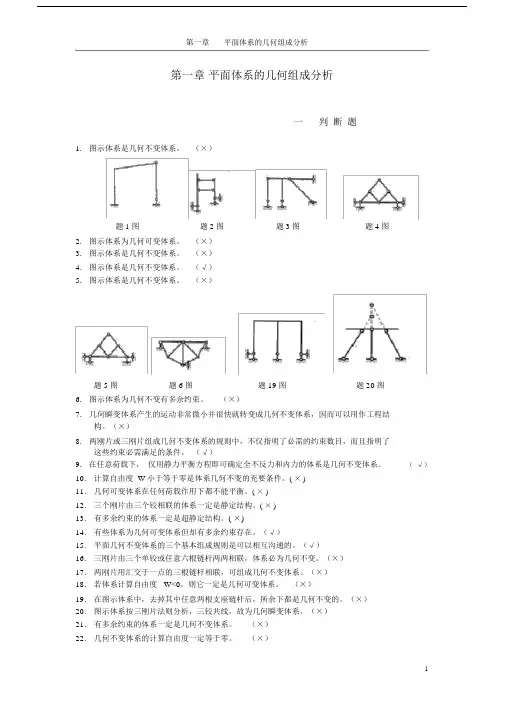
第一章平面体系的几何组成分析一判断题1. 图示体系是几何不变体系。
(×)题1图题2图题3图题4图2. 图示体系为几何可变体系。
(×)3. 图示体系是几何不变体系。
(×)4. 图示体系是几何不变体系。
(√)5. 图示体系是几何不变体系。
(×)题5图题6图题19图题20图6. 图示体系为几何不变有多余约束。
(×)7. 几何瞬变体系产生的运动非常微小并很快就转变成几何不变体系,因而可以用作工程结构。
(×)8. 两刚片或三刚片组成几何不变体系的规则中,不仅指明了必需的约束数目,而且指明了这些约束必需满足的条件。
(√)9. 在任意荷载下,仅用静力平衡方程即可确定全不反力和内力的体系是几何不变体系。
(√)10. 计算自由度W小于等于零是体系几何不变的充要条件。
(×)11. 几何可变体系在任何荷载作用下都不能平衡。
(×)12. 三个刚片由三个铰相联的体系一定是静定结构。
(×)13. 有多余约束的体系一定是超静定结构。
(×)14. 有些体系为几何可变体系但却有多余约束存在。
(√)15. 平面几何不变体系的三个基本组成规则是可以相互沟通的。
(√)16. 三刚片由三个单铰或任意六根链杆两两相联,体系必为几何不变。
(×)17. 两刚片用汇交于一点的三根链杆相联,可组成几何不变体系。
(×)18. 若体系计算自由度W<0,则它一定是几何可变体系。
(×)19. 在图示体系中,去掉其中任意两根支座链杆后,所余下都是几何不变的。
(×)20. 图示体系按三刚片法则分析,三铰共线,故为几何瞬变体系。
(×)21. 有多余约束的体系一定是几何不变体系。
(×)22. 几何不变体系的计算自由度一定等于零。
(×)23. 几何瞬变体系的计算自由度一定等于零。
(×)24. 图中链杆1和2的交点O可视为虚铰。
第四章 力 法一 判 断 题1. 图示结构,据平衡条件求出B 点约束力,进而得图示弯矩图,即最后弯矩图。
( )(X )题1图 题2图2. 图示结构用力法求解时,可选切断杆件2,4后的体系作为基本结构。
( )(X )3. 图a 结构,支座B 下沉a 。
取图b 中力法基本结构,典型方程中1C a ∆=-。
( ) (X )题3图 题4图4. 图a 所示桁架结构可选用图b 所示的体系作为力法基本体系。
( )(√)5. 图a 结构,取图为力法基本结构,1C l θ∆=。
( ) (X )题5图 题6图6. 图a 结构的力法基本体系如图b ,主系数3311/(3)/()l EI l EA δ=+。
( )(X )7. 图示结构用力法解时,可选切断1,2,3,4杆中任一杆件后的体系作为基本结构.( )(X )题7图 题9图 8. 图示结构受温度变化作用,已知α,h ,选解除支杆B 为力法基本体系(设B X 向上为正),典型方程中自由项2121()/(4)t a t t l h ∆=--。
( )(X )9. 图a 结构,力法基本体系如图b ,自由项412/(8)P ql EI ∆=-。
( )(X )题10图 题11图10.图示超静定梁在支座转动1A ϕ=时的杆端弯矩26.310AB M KN m =⨯⋅,22( 6.310)EI KN m =⨯⋅。
( )(√) 11. 图a 结构,取图b 为力法基本结构,h 为截面高度,α为线胀系数,典型方程中2121()/(2)t a t t l h ∆=--。
( )(X )题12图 题13图 12. 图a 结构,取力法基本体系如图b 所示,则1/C l ∆=∆( )。
(X )13. 超静定结构在荷载作用下的反力和内力,只与各杆件刚度的相对数值有关。
( )(√)14. 图示结构的超静定次数为4。
( )(X )题15图 题16图15. 图示结构,选切断水平杆为力法基本体系时,其3112/(3)h EI δ=。
哈工大结构力学试卷参考答案呼伦贝尔学院建筑工程学院《结构力学》试卷1参考答案考试时间120分钟满分100分学院专业级班姓名学号题号得分评卷人一二三四总分能够减少自由度的装置称为约束。
5、图6所示结构的超静定次数是 6 次,此结构位移法基本未知量的个数是 6 个。
6、结构力学的研究对象是杆件结构。
图67、利用位移计算总公式计算结构位移时,对于桁架只须考虑轴力项,对于梁和刚架只须考虑弯矩项,对于拱要考虑弯矩、轴力项。
三、单项选择题(2分×10题,共20分) 1、下列结构内力只有轴力的是(C )。
A、梁 B、刚架 C、桁架 D、拱2、图7所示平面体系的几何组成性质是( D )。
A、几何不变且无多余约束 B、几何可变C、几何不变且有多余约束D、几何瞬变图73、当一个竖向单位荷载沿结构移动时,表示某一量值变化规律的图形是(C )。
A、弯矩图B、轴力图C、影响线D、剪力图 4、三个刚片用三个铰两两联结而成的体系是( D )。
A、几何不变B、几何可变C、几何瞬变D、以上三者均有可能 5、静定结构在几何构造上的特征是( D )。
A、有多余约束 B、计算自由度W等于零一、判断题(对的打“√”错的打“×”,2分×5题,共10分) 1、静定结构受温度改变影响会产生内力。
(× )2、所谓零秆,既该杆的轴力为零,故从该静定结构去掉,并不影响结构的功能。
(× )3、如图1所示为某超静定刚架对应的力法基本体系,其力法方程的主系数δ36/EI。
(× )4、如图25所示结构的M图是正确的。
(√)X1 EI pl pl s θ i (a)6m l 22是X2 2EI M图p s θ i (b) 6m 图1 l图2 l 图3 5、如图3所示,(a)与(b)所示梁A端的转动刚度示相同的。
(√ ) l/2 l/2 l 二、填空题(每空1分,共15分)ql 2q B 1、图4所示结构支座A的支座反力为 3ql ,方向向上,B截面的剪力为 3ql/2 ,2A C、无多余约束 D、几何不变,且无多余约束 6、位移法的基本未知量是( A)。
第四章 力 法一 判 断 题1. 图示结构,据平衡条件求出B 点约束力,进而得图示弯矩图,即最后弯矩图。
( )(X )题1图 题2图2. 图示结构用力法求解时,可选切断杆件2,4后的体系作为基本结构。
( )(X )3. 图a 结构,支座B 下沉a 。
取图b 中力法基本结构,典型方程中1C a ∆=-。
( ) (X )题3图 题4图4. 图a 所示桁架结构可选用图b 所示的体系作为力法基本体系。
( )(√)5. 图a 结构,取图为力法基本结构,1C l θ∆=。
( ) (X )题5图 题6图6. 图a 结构的力法基本体系如图b ,主系数3311/(3)/()l EI l EA δ=+。
( )(X )7. 图示结构用力法解时,可选切断1,2,3,4杆中任一杆件后的体系作为基本结构.( )(X )题7图 题9图 8. 图示结构受温度变化作用,已知α,h ,选解除支杆B 为力法基本体系(设B X 向上为正),典型方程中自由项2121()/(4)t a t t l h ∆=--。
( )(X )9. 图a 结构,力法基本体系如图b ,自由项412/(8)P ql EI ∆=-。
( )(X )题10图 题11图10.图示超静定梁在支座转动1A ϕ=时的杆端弯矩26.310AB M KN m =⨯⋅,22( 6.310)EI KN m =⨯⋅。
( )(√) 11. 图a 结构,取图b 为力法基本结构,h 为截面高度,α为线胀系数,典型方程中2121()/(2)t a t t l h ∆=--。
( )(X )题12图 题13图 12. 图a 结构,取力法基本体系如图b 所示,则1/C l ∆=∆( )。
(X )13. 超静定结构在荷载作用下的反力和内力,只与各杆件刚度的相对数值有关。
( )(√)14. 图示结构的超静定次数为4。
( )(X )题15图 题16图15. 图示结构,选切断水平杆为力法基本体系时,其3112/(3)h EI δ=。
哈⼯⼤结构⼒学题库六章148第六章⼒矩分配法⼀判断题1. 传递系数C 与杆件刚度和远端的⽀承情况有关.( √ )2. ⼒矩分配中的传递系数等于传递弯矩与分配弯矩之⽐,它与外因⽆关.( √ )3. ⼒矩分配法所得结果是否正确,仅需校核交于各结点的杆端弯矩是否平衡.( × )4. ⼒矩分配法经⼀个循环计算后,分配过程中的不平衡⼒矩(约束⼒矩)是传递弯矩的代数和.( √ )5. ⽤⼒矩分配法计算结构时,汇交与每⼀结点各杆端⼒矩分配系数总和为1,则表明⼒矩分配系数的计算绝对⽆错误.( × )6. 在⼒矩分配法中,分配与同⼀结点的杆端弯矩之和与结点不平衡⼒矩⼤⼩相等,⽅向相同.( × )7. ⼒矩分配法是以位移法为基础的渐进法,这种计算⽅法不但可以获得近似解,也可获得精确解.( √ )8. 在任何情况下,⼒矩分配法的计算结构都是近似的.( × ) 9. ⼒矩分配系数是杆件两端弯矩的⽐值.( × )10. 图⽰刚架⽤⼒矩分配法,求得杆端弯矩M CB =-16/2ql ( ×)题10图题11图题12图11. 图⽰连续梁,⽤⼒矩分配法求得杆端弯矩M BC =—M/2.( × ) 12. 图⽰刚架可利⽤⼒矩分配法求解.( √ )13. ⼒矩分配法就是按分配系数分配结点不平衡⼒矩到各杆端的⼀种⽅法.(× ) 14. 在⼒矩分配法中,同⼀刚性结点处各杆端的⼒矩分配系数之和等于1.( √ ) 15. 转动刚度(杆端劲度)S 只与杆件线刚度和其远端的⽀承情况有关.( √ ) 16. 单结点结构的⼒矩分配法计算结果是精确的.( √ ) 17. ⼒矩分配法仅适⽤于解⽆线位移结构.( √ ) 18. ⽤⼒矩分配法计算图⽰结构时,杆端AC 的分配系数29/18=ACµ.(√ )149题18图题19图题21图19. 图⽰杆AB 与CD 的EI,l 相等,但A 端的劲度系数(转动刚度)S AB ⼤于C 端的劲度系数(转动刚度) S CD .( √ )20. ⼒矩分配法计算荷载作⽤问题时,结点最初的不平衡⼒矩(约束⼒矩)仅是交于结点各杆端固端弯矩的代数和.( × )21. 若使图⽰刚架结点A 处三杆具有相同的⼒矩分配系数,应使三杆A 端的劲度系数(转动刚度)之⽐为:1:1:1.( √ )22. 有结点线位移的结构,⼀律不能⽤⼒矩分配法进⾏内⼒分析.( × ) 23. 计算有侧移刚架时,在⼀定条件下也可采⽤⼒矩分配法.(√ )24. 有结点线位移的结构,⼀律不能⽤⼒矩分配法进⾏内⼒分析.( × )⼆选择题1. 图⽰结构汇交于A 的各杆件抗弯劲度系数之和为∑AS,则AB 杆A 端的分配系数为:( B ) A.∑=S A AB ABi /4µB. ∑=S A AB ABi /3µ C. ∑=S A AB ABi /2µD.∑=S A AB ABi /µ题1图题2图 2. 图⽰结构EI=常数,⽤⼒矩分配法计算时,分配系数µ4A 为:( D )A. 4/11B. 1/2C. 1/3D.4/91503. 在图⽰连续梁中,对结点B 进⾏⼒矩分配的物理意义表⽰( D )A. 同时放松结点B 和结点CB. 同时固定结点B 和结点CC. 固定结点B,放松结点CD. 固定结点C,放松结点B题3图题4图4. 图⽰等截⾯杆件,B 端为定向⽀座,A 端发⽣单位⾓位移,其传递系数为( C )A. C AB =1B. C AB =1/2C. C AB =-1D. C AB =05. 等直杆件AB 的转动刚度(劲度系数)S AB :(A )A 与B 端⽀承条件及杆件刚度有关 B 只与B 端的⽀承条件有关C 与A 、B 两端的⽀承条件有关D 只与A 端⽀承条件有关6. 等直杆件AB 的弯矩传递系数C AB :(B )A 与B 端⽀承条件及杆件刚度有关 B 只与B 端的⽀承条件有关C 与A 、B 两端的⽀承条件有关D 只与A 端⽀承条件有关7. 当杆件刚度(劲度)系数S AB =3i 时,杆的B 端为:(C )A ⾃由端B 固定端C 铰⽀承D 定向⽀承8. ⼒矩分配法计算得出的结果(D )A ⼀定是近似解B 不是精确解C 是精确解D 可能为近似解,也可能是精确解。