西门子300PLC与库卡机器人的硬件组态
- 格式:pptx
- 大小:2.10 MB
- 文档页数:18
网络组态
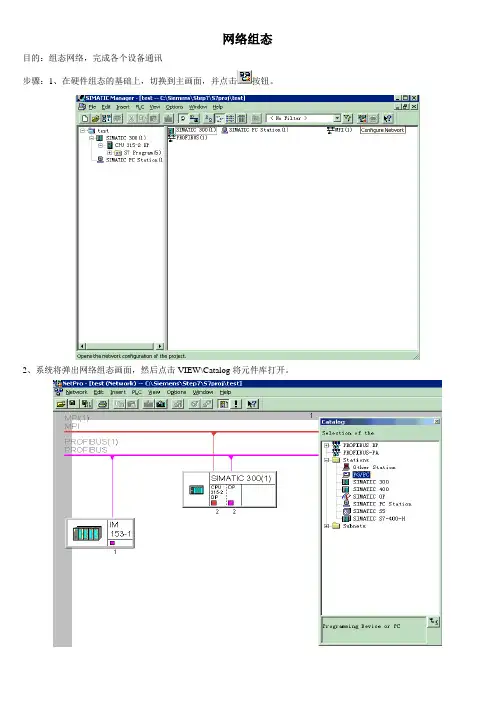
目的:组态网络,完成各个设备通讯
步骤:1、在硬件组态的基础上,切换到主画面,并点击按钮。
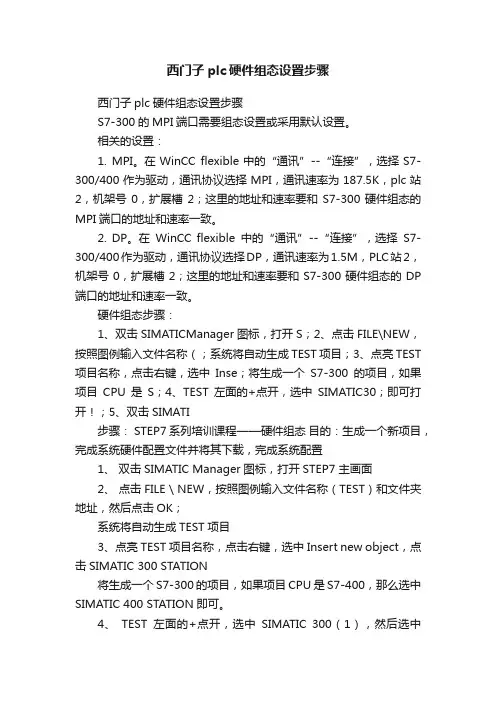
2、系统将弹出网络组态画面,然后点击VIEW\Catalog将元件库打开。
3、将STA TION下面的PG/PC拖入组态画面中,然后双击PG/PC,弹出PG/PC组态画面,然后点开INTERFACES 页。
点击NEW,选择MPI interface,点OK键。
4、然后弹出MPI组态窗口,将MPI地址设置为0,并将SUBNET中的MPI(1)选中,点击确定。
5、点开Assignment页,选中MPI INTERFACE(1)和PC ADAPTER(MPI);然后点击ASSIGN,再点击‘确定’按钮。
PG/PC组态完成。
6、组态PC STA TION ,将PC –STATION拖入组态画面,将其双击,进入PC-STATION组态画面,
(1),点击确定。
然后点击SA VE AND COMPILE,将组态存盘和编译。
8、点击STA TION\Properties,打开PC STATION 属性画面,点开CONFIGURATION 页。
在中间的框中是PC STA TION 的组态文件的文件夹地址和名称。
我们可以用该文件配置PC机的CP5611网卡。
西门子plc硬件组态设置步骤西门子plc硬件组态设置步骤S7-300的MPI端口需要组态设置或采用默认设置。
相关的设置:1. MPI。
在WinCC flexible中的“通讯”--“连接”,选择S7-300/400作为驱动,通讯协议选择MPI,通讯速率为187.5K,plc站2,机架号0,扩展槽2;这里的地址和速率要和S7-300硬件组态的MPI端口的地址和速率一致。
2. DP。
在WinCC flexible中的“通讯”--“连接”,选择S7-300/400作为驱动,通讯协议选择DP,通讯速率为1.5M,PLC站2,机架号0,扩展槽2;这里的地址和速率要和S7-300硬件组态的DP 端口的地址和速率一致。
硬件组态步骤:1、双击SIMATICManager图标,打开S;2、点击FILE\NEW,按照图例输入文件名称(;系统将自动生成TEST项目;3、点亮TEST 项目名称,点击右键,选中Inse;将生成一个S7-300的项目,如果项目CPU是S;4、TEST左面的+点开,选中SIMATIC30;即可打开!;5、双击SIMATI步骤: STEP7 系列培训课程——硬件组态目的:生成一个新项目,完成系统硬件配置文件并将其下载,完成系统配置1、双击SIMATIC Manager图标,打开STEP7 主画面2、点击FILE \ NEW,按照图例输入文件名称(TEST)和文件夹地址,然后点击OK;系统将自动生成TEST项目3、点亮TEST项目名称,点击右键,选中Insert new object,点击SIMATIC 300 STATION将生成一个S7-300的项目,如果项目CPU是S7-400,那么选中SIMATIC 400 STATION即可。
4、TEST左面的+点开,选中SIMATIC 300(1),然后选中Hardware并双击/或右键点OPEN OBJECT,硬件组态画面即可打开!5、双击SIMATIC 300\RACK-300,然后将Rail 拖入到左边空白处。
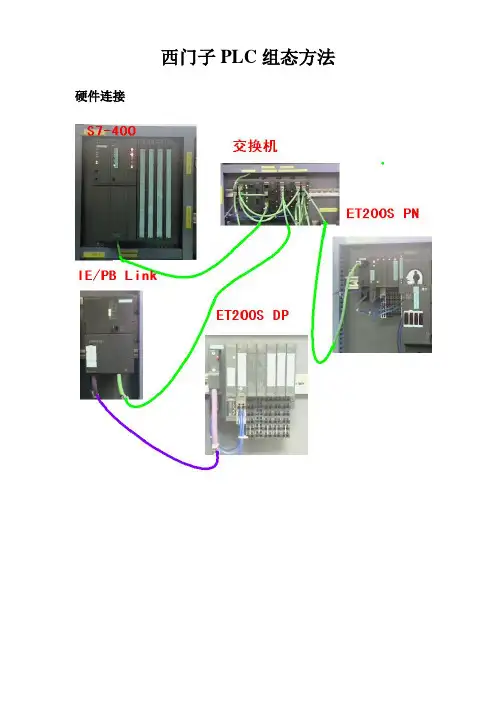
西门子PLC组态方法硬件连接软件组态1、在桌面打开S7tgtopx Manager软件2、点击“File”中的“New”新建文件3、输入新建文件的“名称”(如“zourz”)4、右击“zourz”选择“Insert New Object”中的“SIMATIC 400 Station”5、双击“Hardware”6、PLC组态选择“背板”展开“SIMA TIC 400”选择“BACK-400”,在“BACK-400”中选择与背板相对应的编号“6ES7-400-1JA01-0AA0”即“BACK-400”中的“UR2”,双击“UR2”再点击“OK”完成“背板”选择7、选择“PS-400”展开“SIMATIC 400”选择“PS-400”中的“Standard PS-400”,在“Standard PS-400”中选择编号为“6ES7-407-0KA02-0AA0”即“Standard PS-400”中的“PS 407 10A”,双击“PS 407 10A”再点击“OK”完成“PS-400”选择8、选择“CPU”展开“SIMATIC 400”选择“CPU-400”中的“CPU 416-3 PN/DP”,在“CPU 416-3 PN/DP”中选择“V5.3”双击,在弹出的对话框中可以修改IP地址新建“PN网络”点击“New”在弹出的对话框中可以重命名“PN网络”名称,然后点击“OK”,“OK”再点击对话框中的“OK”完成“CPU-400”选择9、选择“CP”展开“SIMATIC 400”选择“CP-400”中的“CP 443-1 Advanced-IT”,在“CP 443-1 Advanced-IT”中选择“6GK7 443-1GX20-0EX0”中的“V2.0”双击,在弹出的对话框中直接点击“OK”完成“CP”选择10、选择“DI”展开“SIMATIC 400”选择“SM-400”中的“DI-400”,在“DI-400”中选择“DI16xDC24VInterrupt”双击,在弹出的对话框中直接点击“OK”完成“DI”选择11、选择“DO”展开“SIMATIC 400”选择“SM-400”中的“DO-400”,在“DO-400”中选择“DO16xDC24V 、2A”双击,在弹出的对话框中直接点击“OK”完成“DO”选择12、选择“AI”展开“SIMATIC 400”选择“SM-400”中的“AI-400”,在“AI-400”中选择“AI16x16Bit”双击,在弹出的对话框中直接点击“OK”完成“AI”选择13、选择“AO”展开“SIMATIC 400”选择“SM-400”中的“AO-400”,在“AO-400”中选择“AO8x13Bit”双击,在弹出的对话框中直接点击“OK”完成“AO”选择14、对组态完的PLC进行“编译”点击“编译”在弹出的对话框中点击“OK”15、对PLC进行“下载”点击“下载”在弹出的对话框中点击“OK”在弹出的对话框中点击“View”在弹出的对话框中选择MAC号位“00-0E-8C-A7-9F-82”的PLC(选择PLC),然后点击“OK”在弹出的三个对话框中都点击“OK”,然后“硬启动”PLC看状态是否正常。
西门子PLC组态方法硬件连接软件组态1、在桌面打开S7tgtopx Manager软件2、点击“File”中的“New”新建文件3、输入新建文件的“名称”(如“zourz”)4、右击“zourz”选择“Insert New Object”中的“SIMATIC 400 Station”5、双击“Hardware”6、PLC组态选择“背板”展开“SIMA TIC 400”选择“BACK-400”,在“BACK-400”中选择与背板相对应的编号“6ES7-400-1JA01-0AA0”即“BACK-400”中的“UR2”,双击“UR2”再点击“OK”完成“背板”选择7、选择“PS-400”展开“SIMATIC 400”选择“PS-400”中的“Standard PS-400”,在“Standard PS-400”中选择编号为“6ES7-407-0KA02-0AA0”即“Standard PS-400”中的“PS 407 10A”,双击“PS 407 10A”再点击“OK”完成“PS-400”选择8、选择“CPU”展开“SIMATIC 400”选择“CPU-400”中的“CPU 416-3 PN/DP”,在“CPU 416-3 PN/DP”中选择“V5.3”双击,在弹出的对话框中可以修改IP地址点击“New”在弹出的对话框中可以重命名“PN网络”名称,然后点击“OK”,“OK”9、选择“CP”展开“SIMATIC 400”选择“CP-400”中的“CP 443-1 Advanced-IT”,在“CP 443-1 Advanced-IT”中选择“6GK7 443-1GX20-0EX0”中的“V2.0”双击,在弹出的对话框中直接点击“OK”完成“CP”选择10、选择“DI”展开“SIMATIC 400”选择“SM-400”中的“DI-400”,在“DI-400”中选择“DI16xDC24V11、选择“DO”展开“SIMATIC 400”选择“SM-400”中的“DO-400”,在“DO-400”中选择“DO16xDC24V 、2A”双击,在弹出的对话框中直接点击“OK”完成“DO”选择12、选择“AI”展开“SIMATIC 400”选择“SM-400”中的“AI-400”,在“AI-400”中选择“AI16x16Bit”双击,在弹出的对话框中直接点击“OK”完成“AI”选择13、选择“AO”展开“SIMATIC 400”选择“SM-400”中的“AO-400”,在“AO-400”中选择“AO8x13Bit”双击,在弹出的对话框中直接点击“OK”完成“AO”选择点击“编译”在弹出的对话框中点击“OK”点击“下载”在弹出的对话框中点击“OK”在弹出的对话框中点击“View”在弹出的对话框中选择MAC号位“00-0E-8C-A7-9F-82”的PLC(选择PLC),然后点击“OK”在弹出的三个对话框中都点击“OK”,然后“硬启动”PLC看状态是否正常。

KUKA工业机器人与S7-1200PLC实现Profinet通讯步骤详
解
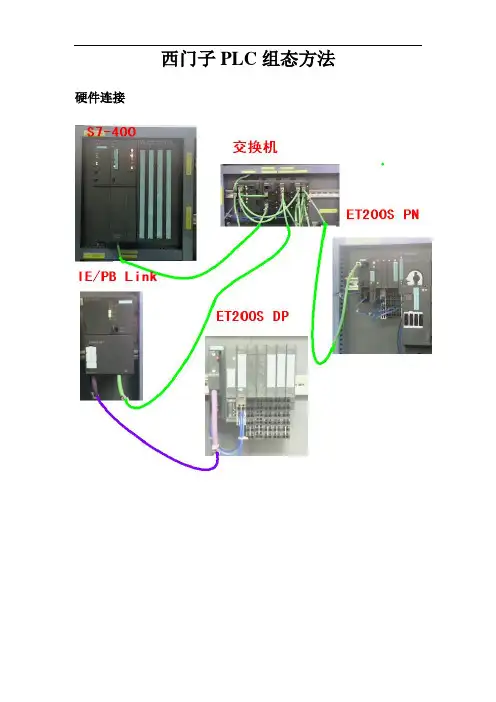
步骤1:完成硬件接线
网线一端连接至控制柜门上的KLI端口,另一端连接到交换机,PLC也连接到交换机(交换机无型号要求),交换机再连接到电脑。
具体接线方式如下示意图:
步骤2:将编程电脑、PLC、KUKA设置成同一个网段(因KUKA 的底层设置原因,最好不更改机器人IP地址)
(1)在博途软件中新建项目,并添加新设备,就是添加一个S7-1200型PLC
(2)点击选项—添加设备描述文件—导入KUKA机器人的GSD文件,这个GSD文件可以在KUKA机器人的示教器存储目录中找到,也可以私信找电气技术微课堂小编索要。
(3)安装GSD,并把KUKA设备进行组态
(4)设置好以上后(包括PLC地址),接下来就可以编译下载到
PLC。
下载完成后PLC会报红灯,是因为下一级组件存在故障,即还没有设置机器人端,连接不到下一级组件,所以报错。
也可以使用此方法判断是否连接成功。
步骤3:WorkVisual对KUKA进行设置
步骤4:激活、添加Profinet、DTM选择Profinet,详细设置过程如下图
步骤5:双击Profinet进行设置
步骤6:进行信号映射
首先生成代码,再下载到控制器,注意在控制器上做好确认工作
步骤7:机器人侧的信号确认:
器人侧即为映射时的IN(..),PLC侧则是在博图里对KUKA设备设置时的IO地址。
西门子PLC与ABB机器人是如何通讯的?【ABB机器人有那些通讯方式?】针对工业机器人,我们一般会关注两个方面:运动性能,直接决定了机器人是否能够用于特定的工艺,比如精度和速度;通信方式,直接决定了机器人能否集成到系统中,以及支持的控制复杂度。
通常,ABB机器人支持的通信方式有:(1)普通IO:a)Signalb)Group signal(2)总线:a)Profinetb)Profibusc)DeviceNetd)EthernetIP等(3)网络:a)Socketb)PC SDKc)RWS(robot web service)d)OPCe)RMQ(robot message queue)(4)其他:confidential接下来,我就重点介绍一下西门子博途中S7-300的PLC是如果通过DP与ABB机器人进行通讯的。
1博途TIA的配置在博途软件中新建项目,本案例选取西门子S7-300PLC,其型号为CPU 313C-2DP,该PLC 为集成式的PLC,自带PROFIBUS-DP口,可以作为主站也可以作为从站,在本案例中,PLC作为主站。
在博途软件里,依次点击“选项”、“管理通用站描述文件”如下图:选中GSD文件,并点击安装,安装因电脑而已,可能需要一点时间。
做到这里,PLC与机器人的硬件组态就已经结束,为了保证正确率,我们需要检查主站与从站的地址,默认的情况下,PLC作为主站,其地址为2,Slave_1也就是机器人端默认的地址是3,如下所示:2机器人端设置展开Industrial Network,并确保系统里存在PROFIBUS_Anybus,如下图所示:如果没有出现,则添加,如下图所示:其中,Name位置填入名称,Input Size(bytes)和Output Size(bytes)填入相应的通讯容量,其中最多支持512位,也就是64的字节。
其余内容无需更改,添加完毕后,点击确定。
3PLC侧通讯程序的编写PLC侧的通讯程序较为简单,只需要将对应的位值移动到相应的地址即可,在本案例中,PLC与机器人没从通讯输入输出一个字节。
工业机器人与可编程控制器(西门子PLC)的通讯引言当今的工业生产领域,工业机器人和可编程控制器(PLC)已经成为了不可或缺的设备。
工业机器人主要用于在生产线上执行重复的、精确的任务,而可编程控制器则用于控制和监控生产线上的各种设备和工艺。
在实际生产中,工业机器人通常需要与可编程控制器进行通讯,以便实现对机器人的控制和监控。
西门子是工业控制领域的知名厂商,其PLC产品在全球范围内得到了广泛的应用。
本文将重点讨论工业机器人与西门子PLC的通讯技术。
工业机器人与PLC的通讯方式工业机器人与PLC的通讯方式主要有两种:以太网通讯和现场总线通讯。
以太网通讯是目前最为流行的通讯方式,它使用工业以太网协议进行数据传输,通常采用TCP/IP协议栈。
现场总线通讯则是基于现场总线技术的通讯方式,主要用于工业设备间的实时数据交换。
以太网通讯以太网通讯是一种高速、可靠的通讯方式,适用于工业机器人与PLC之间的数据交换。
以太网通讯可以实现实时数据传输,能够满足工业生产中对数据传输速度和可靠性的要求,因此被广泛应用于工业自动化领域。
以太网通讯通常采用TCP/IP协议栈,数据传输速度快,通讯稳定可靠。
目前,绝大多数工业机器人和PLC产品都支持以太网通讯,因此工业机器人与PLC之间的通讯多采用以太网通讯方式。
现场总线通讯现场总线通讯是一种针对工业自动化应用的通讯方式,它主要用于连接控制系统和现场设备,实现数据的实时传输和控制。
现场总线通讯能够减少系统的线缆数量,简化系统的安装和维护,提高系统的可靠性和稳定性。
在工业生产中,现场总线通讯通常用于连接传感器、执行器、PLC等设备,实现数据的实时交换和控制。
在一些特定的工业机器人与PLC的通讯场景中,现场总线通讯也被广泛应用。
工业机器人与西门子PLC的通讯方法工业机器人与西门子PLC的通讯方法通常采用以太网通讯方式。
以太网通讯主要包括以太网TCP/IP通讯和PROFINET通讯两种方式。
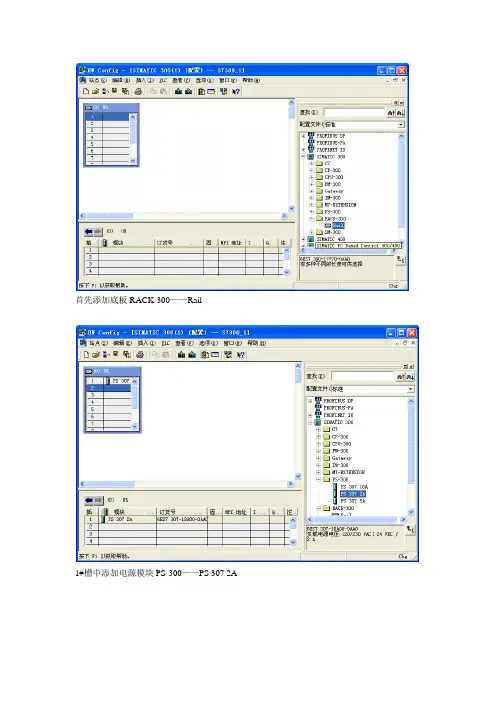
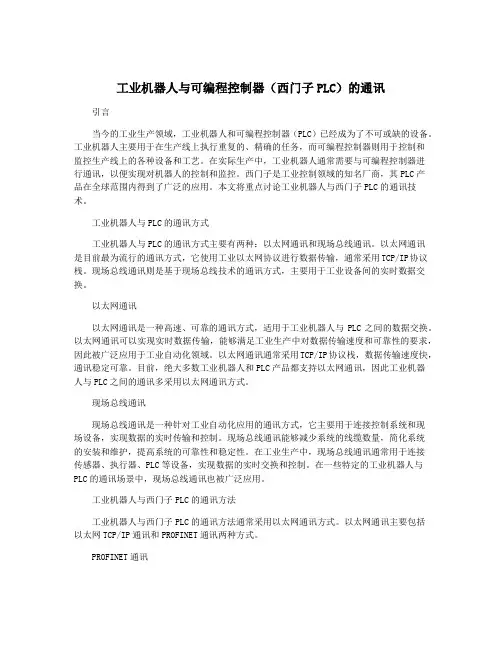
首先添加底板RACK-300——Rail1#槽中添加电源模块PS-300——PS 307 2A根据实训台上实际的CPU系列号添加cpu模块,在PROFIBUS 接口DP 对话框中“新建”一个新的子网,主站默认地址为2。
按“确定”完成。
CPU的I、Q address 默认从124开始,按照试题卷上CPU的输入输出地址要求进行更改。
添加CP 340 RS232串口通讯模块CP 340 RS232C,(系列号为1AH02),插入CP340后双击底板的4号槽位(cp340位置),跳出串口属性设置对话框单击“参数”按钮,出现参数设置对话框:将Protocal 3964(R)改为ACSII。
双击窗口中蓝色的Protocol方块,在Protocol对话框中,将Parit下拉框中的Even修改为None。
关闭对话框并保存更改。
单击OK结束设置。
5#槽中根据实际模块的系列号(1EX20固件版本号为V1.3选V1.1;或1EX21固件版本号为V1.0)添加以太网模块CP 343-1,“新建”一个新的以太网子网,设置IP地址:10.163.227.* 子网掩码:255.255.224.0,按OK完成。
其中*表示是电脑的IP地址加上10。
在挂从站之前,先在“选项”下选择菜单命令“安装GSD 文件”先后安装VIPA和MM440的GSD文件。
点击“浏览”找出GSD文件所在路径,选中存放GSD文件的最终文件夹后“确定”:选中窗口中*.gsd文件后单击“安装”,然后单击“是”完成MM440的GSD文件安装:再次单击“浏览”选中VIPA的GSD文件所在最终文件夹:选中*.gsd文件单击“安装“完成VIPA的GSD文件安装:添加ET 200M Profibus从站。
模块位置:PROFIBUS DP——ET 200M——IM153-1(系列号为1AA03),将153-1模块拖曳到Profibus DP总线上。
在窗口中设置从站站号Address=1,(必须与硬件设置的地址相一致)。
工业机器人与可编程控制器(西门子PLC)的通讯工业机器人是现代制造业中的重要设备,主要用于自动化生产过程中的操作、装配、搬运和包装等环节。
而可编程控制器(PLC)是现代自动化控制系统的核心部件,通过它可以实现对设备和工艺的精细控制和管理。
在现代工业生产过程中,工业机器人和PLC通常需要进行通讯,以实现精细控制和交互信息。
下面将介绍工业机器人与西门子PLC的通讯方法和流程。
1、硬件连接:工业机器人和PLC之间通常采用以太网或串口连接方式进行通讯。
以太网通讯方式速度快,数据传输稳定,通讯距离远,支持多连接。
串口通讯方式连接简单,通讯速率较慢,但距离短。
2、通讯协议:根据不同的工业机器人和PLC品牌,需要对应相应的通讯协议进行通讯。
目前较为流行的协议有西门子S7通讯协议、Modbus协议、Profibus协议、Ethernet/IP协议等。
3、通讯方式:PLC与工业机器人之间的通讯方式通常包括主从方式和点对点方式。
主从方式是指PLC作为主机,在通讯过程中发起通讯请求,工业机器人作为从机,接受请求并返回数据。
这种通讯方式适用于对工业机器人进行指令控制和数据采集。
点对点方式是指PLC与工业机器人之间的通讯是平等的,两者可以相互发送数据和指令。
这种通讯方式更加灵活,数据传输速度快,在工业机器人任务调度和性能优化方面更加方便。
1、PLC与工业机器人连接需要先确定PLC和工业机器人之间的连接方式和通讯协议,设置好通讯参数和硬件连接。
一般需要根据具体情况进行调试和测试。
在主从式通讯模式下,PLC会向工业机器人发送读取数据请求,工业机器人在接受到请求后会将数据发送至PLC。
在点对点通讯模式下,PLC可以主动向工业机器人发送数据请求,也可以接收工业机器人发送的数据。
在每次数据收发后需要对数据进行处理和解析,以便PLC能够正确地控制工业机器人。
在点对点通讯模式下,PLC和工业机器人之间可以建立一个工作协议,在协议中规定指令的格式和执行方式。
KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤本次内容来简单谈一谈KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤。
步骤1:完成硬件接线
网线一端连接至控制柜门上的KLI端口,另一端连接到交换机,PLC也连接到交换机(交换机无型号要求),交换机再连接到电脑。
具体接线方式如下示意图:
步骤2:将编程电脑、PLC、KUKA设置成同一个网段(因KUKA的底层设置原因,最好不更改机器人IP地址)
(1)在博途软件中新建项目,并添加新设备,就是添加一个S7-1200型PLC
(2)点击选项—添加设备描述文件—导入KUKA机器人的GSD文件,这个GSD文件可以在KUKA机器人的示教器存储目录中找到,也可以私信找电气技术微课堂小编索要。
(3)安装GSD,并把KUKA设备进行组态
(4)设置好以上后(包括PLC地址),接下来就可以编译下载到PLC。
下载完成后PLC 会报红灯,是因为下一级组件存在故障,即还没有设置机器人端,连接不到下一级组件,所以报错。
也可以使用此方法判断是否连接成功。
步骤3:WorkVisual对KUKA进行设置
步骤4:激活、添加Profinet、DTM选择Profinet,详细设置过程如下图
步骤5:双击Profinet进行设置。
西门⼦300PLC连接组态王KingSCADA实现ModbusTCP通信西门⼦300PLC连接组态王KingSCADA实现ModbusTCP通信
西门⼦300系列PLC 本案例⽤PLC的是315-2DP,此型号PLC有两个通信接⼝分别是MPI、DP⼝。
⾸先把300PLC连接兴达易控PLC转以太⽹模块CHNet-S7300MD通过ModbusTCP或者是S7TCP 与上位机组态软件通信
1. 新建⼯程并打开⼯程,右击“IOServer 应⽤组”,选择“添加新 IOServer 应⽤组”。
2. 在弹出的对话框中,填⼊“应⽤名称”,点击“确定”。
3. 选择“设备”,在右边空⽩区域,点击⿏标右键,选择“新建”。
4. 在“设备名称”处输⼊⼀个名称,点击“下⼀步”。
5. “采集驱动”选择“S7_TCP”;“链路类型”选择“以太⽹”,点击“下⼀步”。
6. “链路逻辑名”默认即可,点击“下⼀步”。
7. “设备系列”选择“S7-300(TCP)”,“设备地址”的格式为:CHNet-S7MPI 的 IP 地址:0:2,这⾥CHNet-S7MPI 的 IP 地址为
192.168.1.188,点击“下⼀步”。
8. 其他参数默认,直⾄完成。
西门子S7-300与组态王进行以太网通讯的解决方案借助远创智控MPI转以太网模块
MPI-ETH-YC01以太网模块支持和市面上所有的SCADA 监控组态软件以太网通讯,例如:组态王、易控、WINCC、IFIX、MCGS、INTOUCH、力控、LABVIEW杰控等。
远创智控转以太网模块,型号MPI-ETH-YC01适用于西门子S7-200/S7-300/S7-400程序上下载、上位监控、设备联网和数据采集。
不占用PLC 编程口,即编程软件/上位机软件通过以太网对PLC数据监控和采集的同时,触摸屏可以通过扩展RS485口与PLC进行通讯。
西门子S7-300与组态王进行以太网通讯方法如下
用MPI-ETH-YC01模块插上西门子S7-300/400的9针口上,拓展出来的网口可以与组态王进行以太网通讯,可以采用:S7TCP驱动。
1、打开组态王工程浏览器——设备(COM1),双击右侧“新建”
2、选择西门子 S7-300 系列 TCP 驱动,点击【下一步】;
3、填入设备名称;
4、填入模块的 IP 地址:CPU 机架号:CPU 槽号(默认为 3);
5、完成参数设置。
工业机器人与可编程控制器(西门子PLC)的通讯随着工业自动化技术的发展,工业机器人在生产线上扮演着越来越重要的角色。
而作为工业自动化系统的关键组成部分之一,可编程控制器(PLC)也在控制和监控工业机器人的运行中发挥着至关重要的作用。
工业机器人与PLC之间的通讯问题成为了自动化行业中的一个热点话题。
本文将就工业机器人与西门子PLC之间的通讯进行探讨,以及如何实现二者之间的高效稳定的通讯。
在工业自动化行业中,西门子PLC是一个非常知名的品牌,其在自动化控制领域有着非常丰富的经验和成熟的控制技术。
而工业机器人也有不同的品牌和型号,其中包括ABB、克番、发那科等。
这些工业机器人通常都具备各自的通讯接口和通讯协议。
要实现工业机器人与西门子PLC之间的通讯,需要采用合适的通讯方式和协议。
一般来说,西门子PLC与工业机器人之间的通讯方式主要有以下几种:1. 以太网通讯2. 串口通讯3. Profibus通讯4. Profinet通讯以太网通讯是目前较为流行的通讯方式之一,其具有高速、稳定的特点,可以满足工业机器人实时控制和数据传输的要求。
而串口通讯则是传统的通讯方式,虽然速度较慢,但其稳定性好,使用也较为方便。
而Profibus和Profinet是由西门子公司开发的两种通讯协议,可以实现不同品牌的设备之间的通讯。
对于工业机器人与西门子PLC之间的通讯,可以根据具体的实际情况选择合适的通讯方式和协议。
1. 选择合适的通讯方式和协议首先要根据具体的应用场景和设备要求,选择合适的通讯方式和协议。
对于有较高实时性和数据传输速度要求的应用场景,可以选择以太网通讯;而对于一些对实时性要求不太高但需要稳定性的控制场景,可以选择串口通讯。
要根据具体的设备来选择合适的通讯协议,以实现设备之间的兼容和互联。
2. 配置合适的通讯参数在实施工业机器人与PLC通讯时,需要正确配置通讯参数,包括设备的IP地址、端口号、通讯速率等。
这些参数的设置直接影响着通讯的稳定性和数据传输的可靠性,因此需要仔细调整和配置,确保通讯的正常运行。
西门子软PLC与组态软件如何通1. 使用OPC协议通信:OPC(Ole for Process Control,过程控制对象连接)是一种用于将数据从PLC传输到组态软件的开放标准协议。
西门子软PLC可以通过支持OPC协议的驱动程序与组态软件进行通信。
组态软件通过OPC客户端访问PLC上的数据,实现数据读取和写入功能。
2. 使用Modbus通信:Modbus是一种常用的开放通讯协议,支持串口和以太网等多种通信方式。
西门子软PLC可以通过添加Modbus通信模块或使用内置的Modbus功能与组态软件进行通信。
组态软件作为Modbus主站访问PLC上的数据,实现数据读取和写入功能。
3.使用TCP/IP通信:西门子软PLC和组态软件可以通过TCP/IP协议进行通信。
西门子软PLC作为服务器,组态软件作为客户端,通过TCP/IP网络连接进行数据交换。
组态软件可以通过读取和写入PLC的寄存器来获取和设置PLC上的数据。
4.使用数据库通信:西门子软PLC可以通过支持数据库连接的驱动程序与组态软件进行通信。
PLC通过将数据写入数据库或从数据库读取数据,实现与组态软件之间的数据交换。
组态软件可以通过访问数据库来获取PLC的数据。
需要注意的是,通信方式的选择应根据具体需求和硬件条件来决定。
比如,如果PLC和组态软件在同一台计算机上运行,可以选择使用本地通信方式(如OPC或TCP/IP);如果PLC和组态软件在不同的地理位置,可以选择使用Internet通信方式(如Modbus或TCP/IP)。
此外,需要确保PLC和组态软件之间的通信参数设置正确,例如PLC的IP地址、端口号、协议类型等。
同时,也需确保PLC程序正确编写,提供正确的数据格式和访问权限,以便组态软件能够正确地读取和写入数据。
总的来说,西门子软PLC与组态软件的通信可以通过OPC、Modbus、TCP/IP和数据库等方式实现,具体选择取决于实际应用需求和硬件条件。