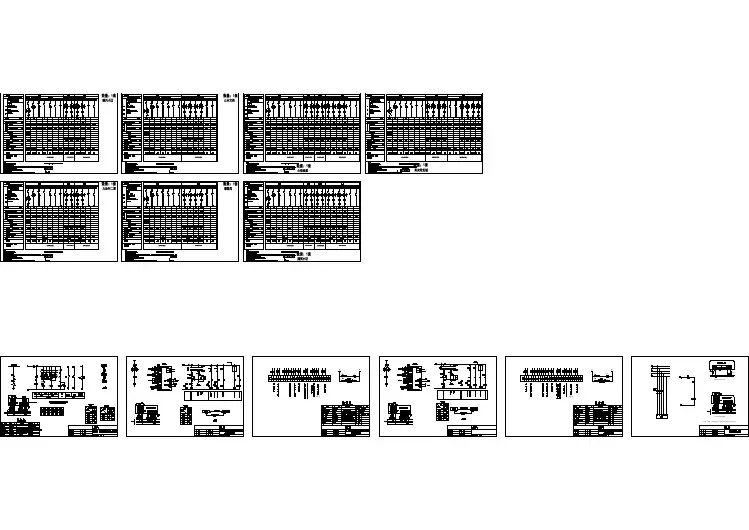
集中供暖电气控制系统的设计说明
- 格式:doc
- 大小:365.50 KB
- 文档页数:50
供热系统热控安装施工方案
一、前言
供热系统的热控安装是确保系统正常运行、保障供热效果的重要环节。
本文将介绍供热系统热控安装的施工方案设计及实施过程,以提供参考指导。
二、施工方案设计
1. 安装位置选择
供热系统的热控器应安装在通风良好、不受阳光直射、避免受到其他热源影响的地方,避免受到外部环境温度影响。
2. 配线规划
根据实际布置情况,进行配线规划,尽量减少电缆长度,避免交叉干扰,确保电缆连接牢固。
3. 安装方式选择
根据供热系统热控器类型的不同,选择合适的安装方式,保证设备稳固可靠。
三、实施过程
1. 材料准备
准备好所需安装设备、电缆、工具等材料,并检查其完好性。
2. 施工准备
确定安装位置、清理安装区域,确保施工环境整洁、安全。
3. 确定安装位置
根据设计要求,确定热控器的安装位置,使用工具固定好安装基座。
4. 连接电缆
根据配线规划,正确连接电缆,并进行绝缘处理,确保连接牢固可靠。
5. 安装测试
完成安装后,进行设备的功能测试,检查是否正常工作。
6. 整理清理
清理施工现场,确保没有遗留材料和工具,保持施工区域整洁。
结语
供热系统热控安装是供热系统正常运行的基础,合理的安装方案和严格的实施过程是确保系统顺利运行的关键。
在实际工作中,要根据具体情况进行细致的设计和施工,确保供热系统的稳定性和可靠性。
参考文献
•供热系统设计及安装手册
•供热系统安装实施标准。
供暖设计说明书尊敬的用户,欢迎您选择我们的供暖系统,为了确保您的居住环境温暖舒适,本说明书将详细介绍供暖设计方案,并提供操作、维护等相关信息。
一、设计原则本供暖系统设计遵循以下原则:1. 保障室内温度稳定:通过科学计算,确保供暖系统能够在最佳运行状态下,提供恒定的室内温度。
2. 能源高效利用:采用先进的供暖设备和技术,降低能源消耗,减少能源浪费。
3. 环保节能:配备绿色环保材料,减少二氧化碳排放,实现可持续发展。
二、供暖系统概述本供暖系统采用空气源热泵技术,具有以下特点:1. 无需燃烧燃料:可避免室内产生烟尘及有害气体,确保居住环境清洁卫生。
2. 供暖快速舒适:热泵系统能够快速提供温暖的空气,满足用户对室内温度的需求。
3. 能耗低:通过空气源热泵技术,能耗相对传统供暖方式降低30%以上。
4. 安全可靠:采用先进的安全控制系统,确保供暖系统稳定、可靠运行。
三、供暖系统组成及安装1. 主机安装:供暖主机设备安装在室外或室内,并确保安装基础稳固、通风良好。
2. 散热器安装:根据室内结构和热负荷需求,合理选择散热器型号和安装位置。
3. 配管布局:合理设置供水管、回水管和热泵连接管道,确保水流畅、供暖效果良好。
4. 控制系统安装:配备智能控制器,实现温度调节、定时开关等功能,提升使用便利性。
四、操作及维护1. 使用操作:按需调节室内温度,设置合理的温度范围,合理使用供暖系统,避免浪费。
2. 定期清洁:定期检查系统连接,清理散热器表面灰尘,保持良好的散热效果。
3. 定期维护:每年定期请专业技术人员对供暖系统进行检查、维护和清洗,确保设备正常运行。
4. 异常处理:如发现供暖系统异常,及时联系售后服务部门,不随意私自拆卸或修理。
五、系统安全措施1. 防冻保护:系统设有低温防冻保护装置,确保在严寒天气中不会冻结及损坏。
2. 电气安全:电控元件采用国际一流品牌,具备过流、欠压、过压等保护功能,保障电气安全。
3. 水压保护:系统设有水压控制装置,防止因水压过高或过低导致的设备损坏。
技术信息关于本技术手册的注意事项有效性本技术手册仅在中国地区有效。
自2017年11月起生效。
您可以从您的专业批发商处,或者您所在地区的瑞好分支机构处获得本技术信息,也可从互联网上下载:/TI本文件受版权保护。
保留翻译、复制、图纸绘制、公布和以照相制版方式或类似方法进行提供以及储存在数据处理系统中的权利。
所有测量值和重量值均为近似数值。
错漏和变更除外。
最新技术信息为确保瑞好产品的安全使用,请经常查看是否可获得更新版本的技术信息。
收到的技术信息的发布日期可在封底右下角找到。
2目录1 概述 41.1 适用范围及工作原理 41.2 安装规范以及产品标准 52 系统概述 62.1 RAUTHERM plugin加热电缆 62.2 RAUTHERM plugin控制技术 72.3 典型加热系统 83 加热系统安装说明 93.1 使用范围 93.2 安全提示 103.3 线路连接以及电气安装 113.4 重要的常规提示 123.5 重要说明: 加热电缆 133.6 重要说明:热线与冷线的连接 133.7 重要说明:最大允许的地板厚度 143.8 重要说明: 施工前提 143.9 重要说明:填充层结构 153.10 重要说明:地板直接供暖系统 153.11 安装前的准备工作 163.12 RAUTHERM plugin 加热电缆安装前的准备工作163.13 RAUTHERM plugin加热电缆的铺装 173.14 正确放置温度传感器 193.15 隐蔽工程验收 203.16 后续施工 203.17 调试 223.18 地面结构和电路安装 2331 概述1.1 适用范围及工作原理作为一种电热地暖系统,RAUTHERM plugin 可将电能有效地转换成热能。
当热辐射通过地板表层均匀地散发出来时,脚下的温度会略高于头顶温度,这样就能为您营造一个舒适而又健康的室内环境。
RAUTHERM plugin 供暖系统无论在新房建造,还是旧房改造中,都是您的不二选择。

基于PLC的锅炉供热控制系统的设计一、本文概述随着科技的不断发展,可编程逻辑控制器(PLC)在工业自动化领域的应用日益广泛。
作为一种高效、可靠的工业控制设备,PLC以其强大的编程能力和灵活的扩展性,成为现代工业控制系统的重要组成部分。
本文旨在探讨基于PLC的锅炉供热控制系统的设计,通过对锅炉供热系统的分析,结合PLC控制技术,实现对供热系统的智能化、自动化控制,提高供热效率,降低能耗,为工业生产和居民生活提供稳定、可靠的热源。
文章首先介绍了锅炉供热系统的基本构成和工作原理,分析了传统供热系统存在的问题和不足。
然后,详细阐述了PLC控制系统的基本原理和核心功能,包括输入/输出模块、中央处理单元、编程软件等。
在此基础上,文章提出了基于PLC的锅炉供热控制系统的总体设计方案,包括系统硬件选型、软件编程、系统调试等方面。
通过本文的研究,期望能够实现对锅炉供热控制系统的优化设计,提高供热系统的控制精度和稳定性,降低运行成本,促进节能减排,为工业生产和居民生活提供更加安全、高效的供热服务。
也为相关领域的研究人员和技术人员提供有价值的参考和借鉴。
二、锅炉供热系统基础知识锅炉供热系统是一种广泛应用的热能供应系统,其主要任务是将水或其他介质加热到一定的温度,然后通过管道系统输送到各个用户端,满足各种热需求,如工业生产、居民供暖等。
该系统主要由锅炉本体、燃烧器、热交换器、控制系统和辅助设备等几部分构成。
锅炉本体是供热系统的核心设备,负责将水或其他介质加热到预定温度。
其根据燃料类型可分为燃煤锅炉、燃油锅炉、燃气锅炉、电锅炉等。
锅炉的性能参数主要包括蒸发量、蒸汽压力、蒸汽温度等。
燃烧器是锅炉的重要组成部分,负责燃料的燃烧过程。
燃烧器的性能直接影响到锅炉的热效率和污染物排放。
燃烧器需要稳定、高效、低污染,同时要适应不同的燃料类型和负荷变化。
热交换器是锅炉供热系统中的关键设备,负责将锅炉产生的热能传递给水或其他介质。
热交换器的设计应保证高效、稳定、安全,同时要考虑到热能的充分利用和防止结垢、腐蚀等问题。
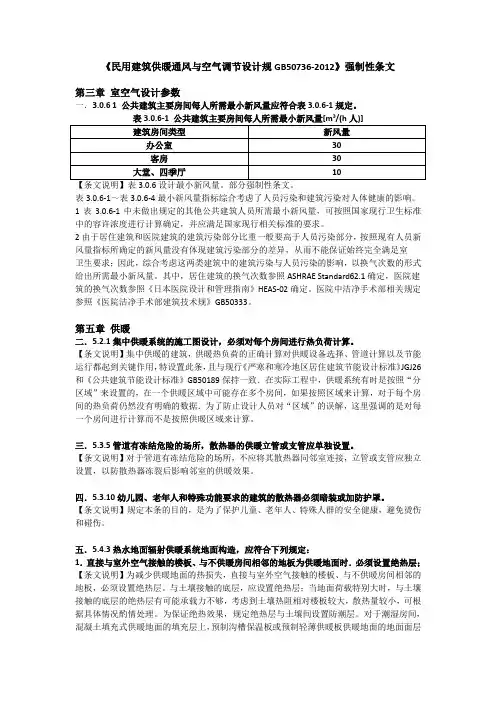
《民用建筑供暖通风与空气调节设计规GB50736-2012》强制性条文第三章室空气设计参数一.3.0.6 1 公共建筑主要房间每人所需最小新风量应符合表3.0.6-1规定。
3【条文说明】表3.0.6设计最小新风量。
部分强制性条文。
表3.0.6-1~表3.0.6-4最小新风量指标综合考虑了人员污染和建筑污染对人体健康的影响。
1表3.0.6-1中未做出规定的其他公共建筑人员所需最小新风量,可按照国家现行卫生标准中的容许浓度进行计算确定,并应满足国家现行相关标准的要求。
2由于居住建筑和医院建筑的建筑污染部分比重一般要高于人员污染部分,按照现有人员新风量指标所确定的新风量没有体现建筑污染部分的差异,从而不能保证始终完全满足室卫生要求;因此,综合考虑这两类建筑中的建筑污染与人员污染的影响,以换气次数的形式给出所需最小新风量。
其中,居住建筑的换气次数参照ASHRAE Standard62.1确定,医院建筑的换气次数参照《日本医院设计和管理指南》HEAS-02确定。
医院中洁净手术部相关规定参照《医院洁净手术部建筑技术规》GB50333。
第五章供暖二.5.2.1集中供暖系统的施工图设计,必须对每个房间进行热负荷计算。
【条文说明】集中供暖的建筑,供暖热负荷的正确计算对供暖设备选择、管道计算以及节能运行都起到关键作用,特设置此条,且与现行《严寒和寒冷地区居住建筑节能设计标准》JGJ26和《公共建筑节能设计标准》GB50189保持一致.在实际工程中,供暖系统有时是按照“分区域”来设置的,在一个供暖区域中可能存在多个房间,如果按照区域来计算,对于每个房间的热负荷仍然没有明确的数据.为了防止设计人员对“区域”的误解,这里强调的是对每一个房间进行计算而不是按照供暖区域来计算。
三.5.3.5管道有冻结危险的场所,散热器的供暖立管或支管应单独设置。
【条文说明】对于管道有冻结危险的场所,不应将其散热器同邻室连接,立管或支管应独立设置,以防散热器冻裂后影响邻室的供暖效果。
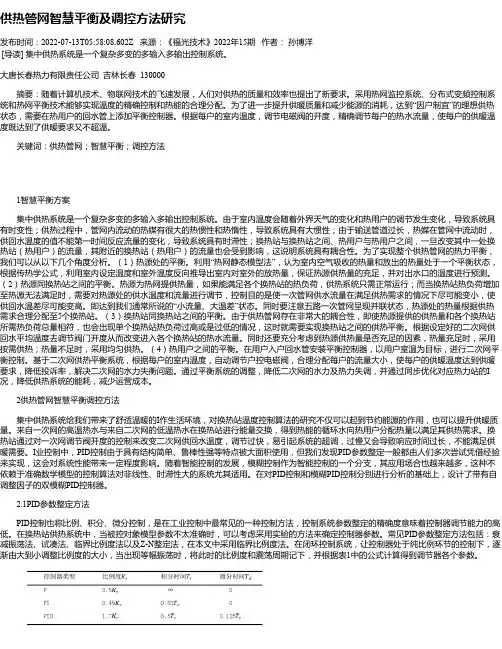
供热管网智慧平衡及调控方法研究发布时间:2022-07-13T05:58:08.602Z 来源:《福光技术》2022年15期作者:孙博洋[导读] 集中供热系统是一个复杂多变的多输入多输出控制系统。
大唐长春热力有限责任公司吉林长春 130000摘要:随着计算机技术、物联网技术的飞速发展,人们对供热的质量和效率也提出了新要求。
采用热网监控系统、分布式变频控制系统和热网平衡技术能够实现温度的精确控制和热能的合理分配。
为了进一步提升供暖质量和减少能源的消耗,达到“因户制宜”的理想供热状态,需要在热用户的回水管上添加平衡控制器。
根据每户的室内温度,调节电磁阀的开度,精确调节每户的热水流量,使每户的供暖温度既达到了供暖要求又不超温。
关键词:供热管网;智慧平衡;调控方法1智慧平衡方案集中供热系统是一个复杂多变的多输入多输出控制系统。
由于室内温度会随着外界天气的变化和热用户的调节发生变化,导致系统具有时变性;供热过程中,管网内流动的热媒有很大的热惯性和热惰性,导致系统具有大惯性;由于输送管道过长,热媒在管网中流动时,供回水温度的值不能第一时间反应流量的变化,导致系统具有时滞性;换热站与换热站之间、热用户与热用户之间,一旦改变其中一处换热站(热用户)的流量,其附近的换热站(热用户)的流量也会受到影响,这说明系统具有耦合性。
为了实现整个供热管网的热力平衡,我们可以从以下几个角度分析。
(1)热源处的平衡。
利用“热网静态模型法”,认为室内空气吸收的热量和放出的热量处于一个平衡状态,根据传热学公式,利用室内设定温度和室外温度反向推导出室内对室外的放热量,保证热源供热量的充足,并对出水口的温度进行预测。
(2)热源同换热站之间的平衡。
热源为热网提供热量,如果能满足各个换热站的热负荷,供热系统只需正常运行;而当换热站热负荷增加至热源无法满足时,需要对热源处的供水温度和流量进行调节,控制目的是使一次管网供水流量在满足供热需求的情况下尽可能变小,使供回水温差尽可能变高。
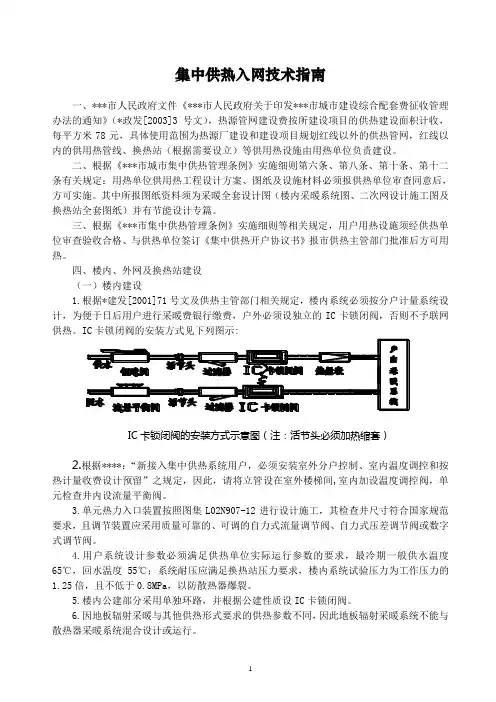
集中供热入网技术指南一、***市人民政府文件《***市人民政府关于印发***市城市建设综合配套费征收管理办法的通知》(*政发[2003]3号文),热源管网建设费按所建设项目的供热建设面积计收,每平方米78元,具体使用范围为热源厂建设和建设项目规划红线以外的供热管网,红线以内的供用热管线、换热站(根据需要设立)等供用热设施由用热单位负责建设。
二、根据《***市城市集中供热管理条例》实施细则第六条、第八条、第十条、第十二条有关规定:用热单位供用热工程设计方案、图纸及设施材料必须报供热单位审查同意后,方可实施。
其中所报图纸资料须为采暖全套设计图(楼内采暖系统图、二次网设计施工图及换热站全套图纸)并有节能设计专篇。
三、根据《***市集中供热管理条例》实施细则等相关规定,用户用热设施须经供热单位审查验收合格、与供热单位签订《集中供热开户协议书》报市供热主管部门批准后方可用热。
四、楼内、外网及换热站建设(一)楼内建设1.根据*建发[2001]71号文及供热主管部门相关规定,楼内系统必须按分户计量系统设计,为便于日后用户进行采暖费银行缴费,户外必须设独立的IC卡锁闭阀,否则不予联网供热。
IC卡锁闭阀的安装方式见下列图示:IC卡锁闭阀的安装方式示意图(注:活节头必须加热缩套)2.根据****:“新接入集中供热系统用户,必须安装室外分户控制、室内温度调控和按热计量收费设计预留”之规定,因此,请将立管设在室外楼梯间,室内加设温度调控阀,单元检查井内设流量平衡阀。
3.单元热力入口装置按照图集L02N907-12进行设计施工,其检查井尺寸符合国家规范要求,且调节装置应采用质量可靠的、可调的自力式流量调节阀、自力式压差调节阀或数字式调节阀。
4.用户系统设计参数必须满足供热单位实际运行参数的要求,最冷期一般供水温度65℃,回水温度55℃;系统耐压应满足换热站压力要求,楼内系统试验压力为工作压力的1.25倍,且不低于0.8MPa,以防散热器爆裂。
电气供暖工程施工方案一、工程概况电气供暖工程是利用电能作为热源进行供暖的一种供暖方式。
它具有节能、环保、低噪音等优势,适用于一些无燃气的地区或者部分场所。
本工程的施工地点为XX市某酒店,主要包括客房、餐厅、大堂等区域,总面积约为XXXX平方米。
本次施工的主要任务是安装电热地暖、电暖气等供暖设备,并确保其正常运行。
二、施工准备1. 设计方案确认:根据客户需求,确认供暖设备的类型、数量、布局等设计方案;2. 采购准备:准备好所需的供暖设备、电缆、开关等物资;3. 人员安排:组织好施工队伍,保证施工人员的专业素质和作业安全。
三、施工流程1. 测量定位:根据设计方案,对施工区域进行精准的测量和定位,确定供暖设备的安装位置和布局;2. 管路敷设:进行地暖管路或电暖气管路的敷设工作,确保管路的铺设整齐、规范,并严格按照设计要求进行施工;3. 电缆敷设:进行电缆的敷设工作,保证电缆的牢固、隐蔽,并符合安全标准;4. 设备安装:进行地暖设备、电暖气设备的安装工作,确保设备的牢固、稳定,并进行必要的连接和调试工作;5. 电气连接:进行供暖设备的电气连接工作,确保电力供应的稳定、可靠,并符合国家标准;6. 系统调试:对整个供暖系统进行调试,保证系统的正常运行,温度控制的准确性;7. 完工验收:对施工质量进行全面验收,确保供暖系统的安全、稳定、效果,达到客户的满意。
四、施工注意事项1. 施工现场必须悬挂“施工现场禁止进入”警示牌,做好现场安全防护;2. 严格执行国家相关安全标准,保证施工现场的作业安全;3. 施工过程中需注意材料的处理和保管,确保材料的完整性;4. 施工现场必须保持整洁、无障碍,确保施工作业的顺利进行;5. 施工人员必须佩戴好个人防护用品,严禁酗酒、吸烟等行为。
五、施工保障1. 施工队伍必须按照作业计划和质量要求进行施工,确保施工进度和质量;2. 施工人员必须具备相关的施工证书和技术水平,做到规范施工;3. 施工队伍必须严格执行安全生产制度,确保施工作业的安全。
目录目录引言 (1)第一章绪论 (2)1.1 换热站的发展概述 (2)1.1.1 国外换热站发展概况 (2)1.1.2 国内换热站发展概况 (2)1.2 换热站的简介及运行现状 (3)1.3 课题的来源及意义 (3)第二章换热站的构成和总体设计方案 (5)2.1换热站的简介 (5)2.2换热站控制系统的构成 (5)2.3 换热站控制系统的硬件 (6)2.3.1换热器 (6)2.3.2 循环水泵 (7)2.3.3 阀门 (7)2.3.4 温度计、阀门 (8)2.3.5 PLC S7-200 (8)2.4 换热站工作原理 (11)2.5 系统总体方案设计思路 (12)2.6 该方案要实现的控制功能 (13)第三章控制系统实施方案 (15)3.1 换热站与热用户的连接方式 (15)3.2 温度的控制调节 (15)3.3 循环水流量的调节控制 (16)3.4 压力的调节控制 (17)3.5 换热站总体控制系统方案 (18)3.5.1 换热站控制系统设计 (18)3.5.2 控制系统硬件总体框架图 (18)3.5.3 换热站控制系统电气图 (18)参考文献 (20)引言温度控制系统在国内各行各业的应用虽然应用很广泛,但从国内生产的温度控制器来讲,总体发展水平仍然不高,同日本、美国、德国等先进国家相比仍然有着较大的差距。
目前,我国在这方面总体水平处于20世纪80年代中后期的水平,成熟产品主要以“点位”控制及常规的PID控制器为主,它只能适用于一般的温度系统的控制,难以控制滞后、复杂、时变温度系统控制。
能适应于较高的控制场合的智能化、自适应控制仪表,国内还不十分成熟。
随着国民经济的不断发展,人们对供暖质量的需求也在逐步提高。
在传统供热模式下,为满足供热需求,换热站内设备运行参数多为人工调节,随着室外温度及热负荷的不断改变,不断的人工调节二次供水温度以保证用户室内能够维持恒定的温度。
在这种情况下,人工手动调节必然存在着较大偏差,只能够根据经验达到粗调节,不能够居民对室内温度恒定。
电气自动化技术在供暖中的应用电气自动化技术在供暖中的应用1. 序言供暖是人们生活中不可或缺的一部分,尤其对于寒冷冬天来说。
传统的供暖方式通常依赖于燃烧燃料,如煤炭或天然气,但这些方式存在着能源浪费和环境污染的问题。
随着科技的进步,电气自动化技术逐渐应用于供暖领域,为人们提供了更高效、更环保的供暖解决方案。
2. 电气自动化技术简介电气自动化技术是利用电气设备和自动控制系统来实现设备自动化、智能化的技术。
它包括了传感器、执行器、控制器等设备的应用,通过数据采集、处理和控制来实现对设备和系统的自动化操作。
3. 电气自动化技术在供暖中的应用3.1 温度控制通过电气自动化技术,可以实现对供暖系统中的温度进行精确的控制。
传感器可以实时感知房间的温度,并将数据传输给控制器进行处理。
控制器根据设定的温度范围来控制暖气设备的开关,并通过执行器调节供暖设备的工作状态,从而保持房间的舒适温度。
3.2 能源管理电气自动化技术还可以应用于供暖系统的能源管理中。
通过传感器和控制器,可以监测和控制热能的使用和分配。
在室外温度较高时,系统可以自动降低供暖设备的工作功率,减少能源的消耗;而在室外温度较低时,系统可以自动增加供暖设备的工作功率,提供更多的热能。
3.3 故障诊断与维护电气自动化技术提供了对供暖系统故障诊断的能力。
通过传感器和控制器对设备和系统进行实时监测,可以及时发现故障并进行诊断。
一旦检测到故障,系统可以自动发出警报并采取相应的措施,如停止故障设备的运行,以避免进一步损坏。
这样可以有效提高供暖系统的可靠性和稳定性,减少维修和维护的成本。
4. 对电气自动化技术在供暖中的观点和理解电气自动化技术在供暖中的应用,为供暖领域带来了许多好处。
它提供了对供暖系统温度的精确控制,使得房间温度可以更加舒适和稳定。
通过能源管理,可以降低能源的消耗,减少对环境的影响。
故障诊断与维护功能能及时发现和解决供暖系统中的问题,提高系统的可靠性和稳定性。
第一章绪论集中供暖的发展概述集中供暖是在十九世纪末期,伴随经济的发展和科学技术的进步,在集中供暖技术的基础上发展起来的,它利用热水或蒸汽作为热媒,由集中的热源向一个城市或较大区域供应热能。
集中供暖不仅为城市提供稳定、可靠的热源,改善人民生活,而且与传统的分散供热相比,能节约能源和减少污染,具有明显的经济效益和社会效益。
1.1.1 国外集中供暖发展概况集中供暖方式始于1877年,当时在美国纽约,建立了第一个区域锅炉房向附近14家用户供热。
20世纪初期,一些工业发达的国家,开始利用发电厂内汽轮机的排气,供给生产和生活用热,其后逐渐成为现代化的热电厂。
在上世纪中,特别是二次世界大战以后,西方一些发达国家的城镇集中供暖事业得到迅速发展。
原苏联和东欧国家的集中供暖事业长期以来是实行以积极发展热电厂为主的发展政策。
原苏联集中供暖规模,居世界首位。
地处寒冷气候的北欧国家,如瑞典、丹麦、芬兰等国家,在第二次世界大战以后集中供暖事业发展迅速,城市集中供暖普及率都较高。
据1982年资料,如瑞典首都斯德哥尔摩市,集中供暖普及率为35%;丹麦集中供暖系统遍及全国城镇,向全国1/3以上的居民供暖和热水供应。
第二次世界大战后德国在废墟中进行重建工作,为发展集中供暖提供了有力的条件。
目前除柏林、汉堡、慕尼黑等城市已有规模较大的集中供暖系统外,在鲁尔地区和莱茵河下游,还建立了联结几个城市的城际供暖系统。
在一些工业发达较早的国家中,如美、英、法等国家,早期多以锅炉房供暖来发展集中供暖事业,锅炉房供暖占较大比例。
不过这些国家已非常重视发展热电联产的集中供暖方式。
!1.1.2 国内集中供暖发展概况我国城市集中供暖真正起步是在50年代开始的,党的十一届三中全会以后,特别是国务院1986年下发《关于加强城市集中供热管理工作的报告》,对我国的集中供暖事业的发展起到了极大的推动作用。
虽然我国这些年来集中供暖事业取得了迅速发展,但是和国外相比,我国目前采暖系统相当落后,具体体现在供暖质量差,即室温冷热不均,系统效率低下,不仅多耗成倍能量,而且用户不能自行调节室温。
地暖系统电气设计1.地暖系统设计依据发热电缆低温辐射供暖系统的电气设计符合下列规范:《民用建筑电气设计规范》 JGJ/T16-92《供配电系统设计规范》 GB50052-95《低压配电设计规范》 GB50054-95《高层民用建筑设计防火规范》 GB50045-95《电气装置安装工程施工及验收规范》 GB50254-96…GB50259-96《发热电缆低温辐射供暖系统工程应用技术标准》2. 地暖系统设计说明:电气设计应根据建筑物的使用功能及建设部节能目标要求以及建筑的特殊要求,把供暖的电气回路单独设计。
以上设计方式应考虑配电设备前端设计负荷增容的问题。
原前端设备能否满足负荷增容的要求,若不能满足必须向供电部门申请前端增加配电容量引入建筑物。
对于区域采暖负荷大而分散的建筑物,采暖配电宜单独设计地暖配电系统;对于住宅写字楼、车库、仓库、会议室等独立电量计量的房间,宜将采暖和照明回路合在一起考虑。
增容方式为:既有建筑宜单独设计采暖回路;新建建筑可在电负荷设计中增加采暖用电负荷部分。
3. 地暖系统电气设计步骤:1)电负荷计算:根据采暖热负荷,确定电负荷。
采暖设计安装总功率≤采暖用电计算负荷总功率。
2)确定地暖温控器、接线盒安装位置:根据发热电缆布置图,结合现场实际情况,选定温控器接线盒的暗装位置,将暗盒委托土建专业人员进行安装预埋,一般选用86型暗盒。
根据发热电缆的单双导线形式并结合地温型温控器的形式和位置确定埋管数量,将暗管委托土建专业人员进行暗装预留。
4. 地暖系统中低压配电设备的选型:1)配电电源一般采用AC220V/380V三相五线制配电系统。
配电箱采用墙式或立式结构,防护等级IP54。
2)配电箱内应留有适当的备用回路。
3)地暖系统中断路器的选用:a) 断路器选用带有过流保护和漏电保护脱扣器的复式断路器。
b) 断路器的额定电压、额定电流应大于或等于线路的额定电压、计算电流。
c) 根据IEC规范(515-1989)建议,每一发热电缆线路应相配采用30Ma对地漏电开关(ELCB-EARTH LEAK CIRCUIT BREAKER)作电工保护。
猪舍集中供暖方案策划书3篇篇一《猪舍集中供暖方案策划书》一、引言随着养殖业的发展,猪舍的供暖问题日益重要。
为了提供舒适的环境,保障猪只的健康生长和生产性能,特制定本猪舍集中供暖方案策划书。
二、猪舍供暖需求分析1. 猪舍的地理位置和气候条件了解猪舍所处地区的冬季气温、最低温度等气候数据,以便确定供暖的需求和强度。
2. 猪舍的结构和面积考虑猪舍的建筑结构,包括墙体、屋顶、门窗等的保温性能,以及猪舍的实际面积,以计算所需的供暖能量。
3. 猪只的种类和生长阶段不同种类和生长阶段的猪只对温度的适应范围有所不同,需根据实际情况确定适宜的供暖温度。
三、供暖方案选择1. 传统供暖方式(1)燃煤锅炉供暖:具有成本相对较低的优点,但存在环境污染和操作不便等问题。
(2)燃油锅炉供暖:燃烧效率高,但燃油价格波动较大,运行成本较高。
(3)燃气锅炉供暖:清洁环保,运行成本相对较低,是较为理想的供暖方式之一。
2. 新能源供暖方式(1)太阳能供暖:利用太阳能集热器收集太阳能,通过热交换器将热能传递给猪舍,但受天气影响较大,需要辅助能源。
(2)地源热泵供暖:通过地下土壤或水体进行热量交换,具有节能、环保的特点,但初期投资较高。
3. 综合供暖方案结合传统供暖方式和新能源供暖方式的优点,采用多种供暖设备组合,以提高供暖的可靠性和经济性。
四、供暖设备选型1. 锅炉选型根据猪舍的供暖需求和面积,计算所需的锅炉热功率,并选择合适的锅炉品牌和型号。
2. 散热器选型根据猪舍的结构和布局,选择合适的散热器类型,如暖气片、地暖等,确保供暖均匀。
3. 控制系统选型设计智能化的供暖控制系统,能够根据猪舍温度自动调节供暖功率,提高能源利用效率。
五、供暖系统设计1. 供暖管道布置合理设计供暖管道的走向和布局,确保供暖均匀,避免管道过长和弯曲造成的能量损失。
2. 保温措施对猪舍的墙体、屋顶、门窗等进行保温处理,减少热量散失。
3. 通风系统设计在供暖的同时,设计合理的通风系统,保证猪舍内空气的新鲜度和流通性。
电气施工图设计统一说明一、建筑概况本工程位于(),()路与()路交叉口()。
建筑面积(m2)。
地下()层,主要为车库、各种机房、库房,地上()层,主要为办公室、餐厅、会议室等,属于()类建筑。
建筑主体高度(M),裙房高度(M)。
结构形式为(),基础为(),楼板厚(mm),垫层厚(mm)。
二、设计依据:1.各市政主管部门对初步设计的审批意见;2.甲方设计任务书及设计要求;3.《民用建筑电气设计规X》JGJ/T16-92;4.《10KV及以下变电所设计规X》GB50053-94;5.《供配电系统设计规X》GB50052-95;6.《低压配电设计规X》GB50054-957.《建筑物防雷设计规X》GB50057-94;(2000年版)8.《高层民用建筑设计防火规X》GB50045-95;(2001年版)9.《人民防空地下室设计规X》GB50038-94;10.其它有关国家及地方的现行规X,规X;11.各专业提供的设计资料;三、设计X围本设计包括红线内的以下内容:1.高、低压配电系统;2.电力配电系统;3.照明配电系统;4.楼宇自控系统;5.防雷及接地系统;6.人防工程;7.室外照明系统(与专业厂家配合);8.报告厅,演播室,多功能厅等的调兴照明系统(与专业厂家配合);9.有工艺设备的场所(例如:厨房、电梯等),设计仅预留配电箱;10.根据甲方()文,本工程设计时,公共场所及所有办公室的强电设备均只做预留,强电将电源引至配电箱,预留装修照明仅先期估算照明容量,待以后由室内装修设计负责进行配电盘及平面的二次设计,以防止重复投资。
11.本工程电源分界点在高压进线柜处。
四、供电设计1.本工程负荷等级为()级。
2.本工程从()及()引来两路10kv高压电源,每路均能承担本工程全部负荷。
两路高压电源同时工作,互为备用。
3.10kv高压电源引至设在本工程()层的分界室。
变配电所设在地下()层。
高压为单母线分段运行,手动联络,高压断路器为真空断路器,直流操作()AH,继电保护为定时限过流及速断保护。
集中供暖电气控制系统的设计目录摘要 (1)关键词 (1)1前言 (2)1.1课题背景和意义 (2)1.2设计方案的可行性 (3)1.3课题容概述 (3)2系统总体方案 (4)2.1系统结构 (4)2.2方案总体设计框图 (4)2.3模块方案设计的选择 (6)2.3.1单片机的选择 (6)2.3.2温度检测方案选择 (6)2.3.3流量检测方案设计 (7)2.3.4压力检测方案设计 (7)2.3.5键盘显示电路方案设计 (7)2.3.6射频卡接收电路方案设计 (8)2.3.7报警电路方案设计 (8)2.3.8存储电路与时钟电路方案设计 (8)2.3.9阀门及驱动控制电路方案设计 (9)2.3.10通信电路方案设计 (9)3硬件电路设计 (10)3.1单片机W77E58 (10)3.1.1单片机W77E58引脚功能 (10)3.1.2单片机W77E58复位电路 (12)3.2温度检测电路的设计 (13)3.2.1 DS18B20的外形和部结构 (13)3.2.2温度传感器与单片机的接口电路 (14)3.3 A/D转换电路的设计 (14)3.3.1 TLC2543的介绍 (14)3.3.2 A/D转换工作原理 (15)3.3.3 3.3V的基准电源 (15)3.4流量检测电路的设计 (16)3.4.1 ZRN-LUG涡街流量计 (16)3.4.2检测电路工作原理 (16)3.5压力检测电路的设计 (17)3.5.1压力传感器 (17)3.5.2压力检测电路的工作原理 (17)3.6键盘显示电路的设计 (18)3.6.1键盘部分 (18)3.6.3键盘显示的借口电路 (20)3.7射频卡接收电路的设计 (21)3.8报警电路的设计 (22)3.9存储电路与时钟电路的设计 (22)3.9.1存储芯片 (22)3.9.2时钟芯片 (23)3.9.3存储电路与时钟电路原理图 (23)3.10驱动控制电路的设计 (23)3.10.1电磁阀的驱动控制电路 (23)3.10.2电动阀的驱动控制电路 (24)3.11通信电路的设计 (27)3.12电源电路的设计 (28)3.12.1 +5V电源 (29)3.12.2 +12V电源 (29)4软件设计 (29)4.1主程序设计 (29)4.2温度子程序设计 (31)4.2.1读出温度子程序 (31)4.2.2温度转换命令子程序 (32)4.3电气量测量部分程序设计 (33)4.4显示数据刷新程序设计 (33)4.6中断服务程序设计 (35)5结论 (36)参考文献 (37)致 (38)附录 (39)集中供暖电气控制系统的设计摘要:随着人民生活水平的提高, 工作节奏的加快,使得集中供暖在全国大部分地区,特别是各大中城市的小区之中,逐步发展了起来在新时代背景下的小区住户, 对小区供暖系统的设计提出了人性化、智能化、数字化以及高能低耗等更全面的要求。
本设计采用77E58单片机作为控制装置的核心,实现整个装置的自动化控制。
一方面硬件设计中论述了控制器中基本模块比方说温度检测电路所需的DS18B20、扩展I/O口所用的8255以及变流器所用的AD694等芯片的型号以及功能介绍。
重点阐述了单片机的工作原理、与各个功能之间的接口、扩展、数据传递、通信协议以及驱动。
另一方面软件设计中论述了实现各个功能所需的流程。
该系统采用单片机检测传感器、电阀等相结合,有效地监控了小区的供暖系统。
关键词:供暖;智能控制;温度;射频卡;THE DESIGN OF CENTRAL HEATING ELECTRICAL CONTROL SYSTEMAbstract:With the improvement of people's living standard, the accelerating pace of work, the central heating system in most parts of the country, especially big cities, is more and more important. The progressive development of the residential households demands the district heating system meets the requirements of intelligent, digital and energy effective.This design uses the 77E58 single chip microcomputer as the core control device, realized the control with automation. The design of the hardware discussed the basic module controller such as temperature detection circuit for DS18B20, I/O expansion port with 8255 and used the AD694 chip for the converter. Expounded the principle and functions of the interfaces between extension, data transmission, communication protocol and the hard drive. On the other hand, software design discussed the realization of the various functional processes needed. The system uses single-chip microcomputer detecting sensor, electric valve combination, controls the district heating system effectively.Key words: Heating;Intelligent control;Temperature;Radio frequency card1 前言1.1 课题的前景和意义随着社会能源问题日益引起社会关注, 各行业都在设法节能, 我国北方的供热行业也不例外。
随着城镇供热体制改革的推进, 停止福利供热, 实行用热商品化, 推行供热分户计量是必然趋势。
这要求供热公司提供高质量的供暖, 使用小区供暖式能自主控制室温, 不仅可以降低热费, 而且可实现供热系统的节能。
集中供暖具有管理方便、热源效率高、环境污染小等许多优点。
但也存在很多问题,最突出的是节能与收费的问题。
因为供暖是按面积收取的,不是按采暖量,再加上没有一种装置自动控制供热管道、自动调节室温度,人工开启、关闭阀门又过于麻烦,所以大多采取开窗通风的方式来降低室温度,使热能白白浪费掉了;还有,白天大多数家庭成员或是上班,或是上学,家里没人,但暖气还照常开着,也浪费了很多能源。
浪费热能,其实就是浪费了用于供暖的煤炭资源。
我们萌发了研究、开发自动控制小区集中供暖节能控制器的想法,即利用自动控制原理调节暖气的供热量,解决上班、家中无人及室温过高时暖气的热能浪费问题。
这样不仅能为家庭节省取暖费用,也能为国家节约很多煤炭资源。
同时随着人们生活水平的不断提高,单片机控制无疑是人们追求的目标之一。
单片机自20世纪70年代问世以来,以其极高的性能价格比,受到人们的重视和关注,应用很广、发展很快。
单片机体积小、重量轻、抗干扰能力强、环境要求不高、价格低廉、可靠性高、灵活性好、开发较为容易[1]。
由于具有上述优点,在我国,单片机已广泛地应用在工业自动化控制、自动检测、智能仪器仪表、家用电器、电力电子、机电一体化设备等各个方面,而51单片机是各单片机中最为典型和最有代表性的一种。
这次毕业设计通过对它的学习、应用,以77e58芯片为核心,辅以必要的电路,确保了供热管网安全、稳定、经济运行,提高热网管理效率,成功控制运行成本,实现热网现代化管理水平,对热网进行了智能化的集中监控和量化管理。
1.2 设计方案的可行性分析本系统是基于单片机的系统设计,按照设计要求可分为安装于主管道的主管道控制系统和安装在建筑物的房控制系统两部分。
主控制器根据建筑物房间的温度,控制其主管道流量。
一套主管道控制器可以控制相近的建筑物。
而屋控制器根据房间的温度,控制其主管道流量;采用射频卡设置预存消耗水量值,预存水量不足时,发出报警;具有显示功能,显示容包括:室温度,室设定温度,用水量,供水温度、管道流量、通信通道状态等信息。
其中流量、压力、通过传感器变为模拟信号在通过A\D转换变为数字信号传给控制器也就是单片机。
室控制流量用到了电磁阀,室外用到了电动阀,二者需要驱动电路。
而电动阀门,其驱动电源为交流电压220V,电动阀门需要4-20mA的电流控制,单片机发出的数字信号转换电路转换成电流信号控制电动阀门,电流变换器可用AD694。
控制器从单片机价格考虑采用77E58单片机对于数据存储量大的要求,用到了EEPROM存储器。
显示电路采用LED显示温度、流量等状态。
温度传感器用DS18B20,压力传感器用到ICS1220;流量传感器用涡流流量计;通信电路用到传输芯片RS-485;射频卡用RS232;报警电路要用到蜂鸣器等[2]。
1.3 课题容概述本课题用单片机完成居住室的温度的自动控制及应用热量的计量,并能对小区的主供热管道的温度检测和控制,获得小区的温度的分布,并作为供热中心对供热压力、流量和温度调整的重要依据(故障检测)。
其设计容如下:(1)能根据房间的设定温度,自动调节房间的进水量,也可以手动控制;(2)根据供水的水温,自动换算标准水温的用水量,并实时记录其用水量;(3)采用射频卡设置预存消耗水量值,预存水量不足时,发出报警;(4)具有显示功能,显示容包括:室温度,室设定温度,用水量,供水温度、管道流量、通信通道状态等信息。
(5)通过键盘可以设置5个时段温度;(要求具有时钟功能)(6).当控制器掉电后,电磁阀能自动关闭供热管路;(7)通过通信电路可实时将房间的实际温度及用水量传输到供热监控管理系统;(8)自动温度控制器电路要低功耗设计;(9)现场提供交流220V的电源;(10)主管道控制器可以检测:管道的温度、压力、流量以及流量累计量;(11)通过电动阀控制管道的流量;(12)完成控制的整体电路设计方案,并设计出电路原理图和印制板图;(13)根据系统的功能要求,完成其监控程序的流程。