艾瑞泽7 SAS系统维修手册
- 格式:pdf
- 大小:923.41 KB
- 文档页数:13
奇瑞东方之子维修手册 (三菱电喷部分)奇瑞汽车销售有限公司售后服务部目录第一章. 概述 3 一.基本规格 3二.检修规格 4三.专用工具 5四.系统元理图 7五.电控系统控制过程 8 第二章. 进气系统 10一.空气流量传感器 10二.节气门位置传感器 12三.进气温度传感器 16四.大气压力传感器 18五.怠速马达 20六.节气门体结构 21七.节气门体的清洁 22 第三章. 点火控制系统 23 一.发动机冷却液温度传感器 23 二.曲轴转角传感器 25 三.凸轮轴位置 27 四.点火线圈 29 五.火花塞 31 六.爆震传感器 32 第四章. 排放控制系统 33 第五章. 充电系统 38 第六章. 发动机ECU控制单元 48 第七章. 故障诊断与排除 53第一章.概述东方之子轿车采用电子控制多点顺序燃油喷射系统,发动机电控单元利用安装在发动机不同部位上的各种传感器,测得发动机的各种工作参数,按预先在电脑中设定的控制程序,通过控制喷油器,精确地控制喷油量,使发动机在各种工况下都能获得最佳浓度的混合气。
此外,电子控制汽油喷射系统通过电脑中的控制程序,还能实现起动加浓、暖机加浓、加速加浓、全负荷加浓、减速调稀、强制怠速断油、自动怠速速度控制等功能,满足发动机特殊工况对混合气的要求,使发动机获得良好的燃料经济性和排放性,同时也提高了汽车的使用性能。
一、 基本规格项目 规格节气门腔mm 54节气门位置传感器 可变电阻式节气门体怠速控制伺服机构步进电机型式(旁通空气控制系统,带空气量限制器)怠速位置开关旋转接触式,在节气门体传感器内空气流量传感器卡曼涡流式传感器气压传感器半导体式进气温度传感器热敏电阻式水温传感器热敏电阻式车速传感器磁阻元件式防手动换档开关接触开关式凸轮位置传感器霍尔元件式曲轴转角传感器霍尔元件式动力转向开关接触开关式执行器发动机控制继电器型式接触开关式燃油泵继电器型式 接触开关式喷油器形式和数量 电磁式,4个喷油器型号 CDH240EGR控制电磁阀 负载循环式电磁阀燃油压力调节器调节压力kPa 329二、检修规格项目 规格基本怠速r/min 750±50节气门位置传感器调节电压mV 400~1000节气门位置传感器电阻Ω 28~33(在20°C时) 进气温度传感器电阻kΩ20°C 2.3~3.080°C 0.30~0.4220°C 2.1~2.7水温传感器电阻kΩ80°C 0.26~0.36燃油压力kPa真空软管已脱开 极限怠速时约324~343真空软管已连接 极限怠速时约265喷油器线圈电阻Ω 13~16(在20°C时) 混合气调节螺钉(可变电阻器)的电阻kΩ 4~6三、 专用工具工 具 编 号 名 称 用 途MB9912223 A:MB991219 B:MB991220 C:MB991221 D:MB991222配线套件 A:测试用配线 B:LED 配线 C:LED 配线头 D:探针燃油表的简易检查 A:连接器引脚接触压力检查 B:电源电路的检查C:电源电路的检查D:市售测试表测棒MB991502 MUT-II 附件 读故障代码 MPI 系统检查MB991348测试用配线套件MB991709测试用配线进行故障排除时测量电压MB991519交流发电机配线 连接器在进行故障排除时测量电压MD998463测试用配线 (6脚,方形)怠速控制伺服机构的检查工 具 编 号 名 称 用 途MD998478 测试用配线(3脚,3形)在进行故障排除时测量电压 MD998709 连接软管MD998742 软管接头燃油压力测量MD998706 喷油器试验套件MD991607 喷油器试验用配线MD998741 喷油器试验用接头MD991608 夹子检查喷油器的喷雾形状四、系统原理图 五、电控系统控制过程1、燃油喷射控制ECU控制喷油器驱动时间和喷油正时,使发动机在各种工况下都能获得最佳浓度的混合气。
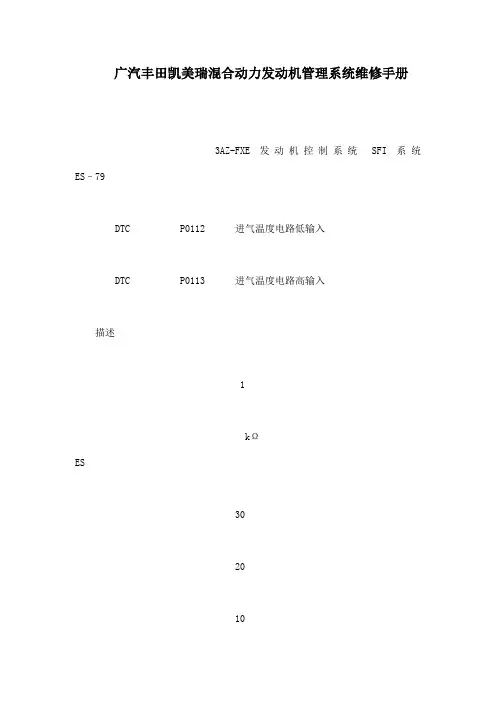
广汽丰田凯美瑞混合动力发动机管理系统维修手册3AZ-FXE 发动机控制系统SFI 系统ES–79DTC P0112 进气温度电路低输入DTC P0113 进气温度电路高输入描述1kΩ ES302010532105030201-20 0 20 40 60 80 100 °C -4 32 68 104 140 176 212 °F A190753E07进气温度传感器安装在质量空气流量计分总成内监视进气温度进气温度传感器中内置有热敏电阻其电阻值随着进气温度的变化而变化进气温度变低时热敏电阻的电阻值增大温度变高时热敏电阻的电阻值减小电阻值的这些变化被作为电压的变化传送给混合动力车辆控制ECU 参见图 1混合动力车辆控制 ECU 端子 THA 经混合动力车辆控制 ECU 内的电阻器 R 将 5 V 电源施加到进气温度传感器上电阻器 R 和进气温度传感器是串联的当进气温度传感器的电阻值随进气温度的变化而变化时端子 THA上的电压也随之变化发动机冷机时混合动力车辆控制 ECU 根据此信号增加燃油喷射量以提高操纵性能提示设定 DTC P0112 和 P0113 之一时混合动力车辆控制 ECU 进入失效保护模式失效保护模式下混合动力车辆控制 ECU 估算进气温度为 20°C 68°F 失效保护模式持续运行直到检测到通过条件为止DTC 编号DTC 检测条件故障部位进气温度传感器电路短路进气温度传感器电路短路持续 05 秒P0112 进气温度传感器内置于质量空气流量计分总成单程检测逻辑混合动力车辆控制 ECUES–80 3AZ-FXE 发动机控制系统 SFI 系统DTC 编号DTC 检测条件故障部位进气温度传感器电路断路进气温度传感器电路断路持续 05 秒P0113 进气温度传感器内置于质量空气流量计分总成单程检测逻辑混合动力车辆控制 ECU提示设定以上任一DTC 时进入以下菜单检查进气温度PowertrainEngine and ECT Data ListIntake Air显示的温度故障-40° C -40° F 断路140°C 284°F短路ES电路图5 V59RTHA 1 THAC6445E2 2 ETHAC64C2ECUA219316E03检查程序提示使用智能检测仪读取定格数据存储 DTC 时混合动力车辆控制 ECU 将车辆和驾驶条件信息记录为定格数据进行故障排除时定格数据以及故障出现时所记录的其他数据有助于确定车辆是运行还是停止发动机是暖机还是未暖机空燃比是稀还是浓1 使用智能检测仪读取值进气温度a 将智能检测仪连接到DLC3b 将电源开关置于 ON IG 位置c 打开检测仪d 进入以下菜单Powertrain Engine and ECT Data ListIntake Aire 读取显示在检测仪上的值3AZ-FXE 发动机控制系统SFI 系统ES–81正常与实际进气温度相同结果结果转至-40°C -40°F A140°C 284°F B与实际进气温度相同C提示如果存在断路智能检测仪显示 -40°C -40°F如果存在短路智能检测仪显示 140°C 284°FB 转至步骤 4 ESC 检查是否存在间歇性故障参见 ES-12 页A2 使用智能检测仪读取值检查线束是否断路a 断开质量空气流量计分总成连接器1 b 连接质量空气流量计分总成线束侧连接器的端子 THA 和2 E2c 将智能检测仪连接到 DLC3d 将电源开关置于 ON IG 位置THA THA e 打开检测仪f 进入以下菜单Powertrain Engine and ECT Data ListE2 ETHA Intake Airg 读取显示在检测仪上的值3 插图文字1 质量空气流量计分总成2 混合动力车辆控制 ECU线束连接器前视图3至质量空气流量计分总成C2 标准值140°C 284°Fh 重新连接质量空气流量计分总成连接器THA E2 异常转至步骤3A203173E07正常更换质量空气流量计分总成参见 ES-258 页ES–82 3AZ-FXE 发动机控制系统 SFI 系统3 检查线束和连接器质量空气流量计 - 混合动力车辆控制 ECUa 断开质量空气流量计分总成连接器b 断开混合动力车辆控制ECU 连接器c 根据下表中的值测量电阻标准电阻断路检查检测仪连接条件规定状态C2-1 THA - C64-59 THA 始终小于 1 ΩC2-2 E2 - C64-45 ETHA 始终小于 1 ΩES d 重新连接质量空气流量计分总成连接器e 重新连接混合动力车辆控制 ECU 连接器异常维修或更换线束或连接器质量空气流量计 -混合动力车辆控制 ECU正常更换混合动力车辆控制 ECU 参见 HV-636 页4 使用智能检测仪读取值检查线束是否短路a 断开质量空气流量计分总成连接器b 将智能检测仪连接到 DLC31 c 将电源开关置于 ON IG 位置d 打开检测仪2 e 进入以下菜单Powertrain Engine and ECT Data ListIntake Airf 读取显示在检测仪上的值THA 插图文字1 质量空气流量计分总成ETHA 2 混合动力车辆控制 ECU标准值-40°C -40°Fg 重新连接质量空气流量计分总成连接器A188268E06异常转至步骤 5正常更换质量空气流量计分总成参见 ES-258 页3AZ-FXE 发动机控制系统SFI 系统ES–835 检查线束和连接器质量空气流量计 - 混合动力车辆控制 ECUa 断开质量空气流量计分总成连接器b 断开混合动力车辆控制 ECU 连接器c 根据下表中的值测量电阻标准电阻短路检查检测仪连接条件规定状态C2-1 THA 或C64-59 THA - 车身搭铁始终10 kΩ或更大d 重新连接质量空气流量计分总成连接器e 重新连接混合动力车辆控制 ECU 连接器 ES异常维修或更换线束或连接器质量空气流量计 -混合动力车辆控制 ECU正常更换混合动力车辆控制 ECU 参见 HV-636 页ES–84 3AZ-FXE 发动机控制系统 SFI 系统DTC P0115 发动机冷却液温度电路故障DTC P0117 发动机冷却液温度电路低输入DTC P0118 发动机冷却液温度电路高输入描述热敏电阻内置于发动机冷却液温度传感器其电阻值随着发动机冷却液温度的变化而变化传感器的结构及其与混合动力车辆控制 ECU 的连接方式和进气温度传感器相同提示ES 设定 DTC P0115 P0117 和 P0118 之一时混合动力车辆控制 ECU 进入失效保护模式失效保护模式下混合动力车辆控制 ECU 估算发动机冷却液温度为 80°C 176°F 失效保护模式持续运行直到检测到通过条件为止DTC 编号DTC 检测条件故障部位发动机冷却液温度传感器电路断路或短路发动机冷却液温度传感器电路断路或短路持续 05 秒P0115 发动机冷却液温度传感器单程检测逻辑混合动力车辆控制 ECU发动机冷却液温度传感器电路短路发动机冷却液温度传感器电路短路持续 05 秒P0117 发动机冷却液温度传感器单程检测逻辑混合动力车辆控制 ECU发动机冷却液温度传感器电路断路发动机冷却液温度传感器电路断路持续 05 秒P0118 发动机冷却液温度传感器单程检测逻辑混合动力车辆控制 ECU提示设定以上任一DTC 时进入以下菜单检查发动机冷却液温度Powertrain Engine and ECT Data ListCoolant Temp显示的温度故障-40° C -40° F 断路140° C 284° F 短路3AZ-FXE 发动机控制系统SFI 系统ES–85电路图5 V60RTHWC64246 ETHW ESC641C4ECUA219316E02检查程序提示使用智能检测仪读取定格数据存储 DTC 时混合动力车辆控制 ECU 将车辆和驾驶条件信息记录为定格数据进行故障排除时定格数据以及故障出现时所记录的其他数据有助于确定车辆是运行还是停止发动机是暖机还是未暖机空燃比是稀还是浓1 使用智能检测仪读取值发动机冷却液温度a 将智能检测仪连接到 DLC3b 将电源开关置于 ON IG 位置c 打开检测仪d 进入以下菜单Powertrain Engine and ECT Data ListCoolant Tempe 读取显示在检测仪上的值标准值发动机暖机时在 80°C 和100°C 176°F 和 212°F之间结果结果转至-40°C -40°FA140°C 284°F B在80°C 和100°C 176°F 和212°F之间C提示如果存在断路智能检测仪显示 -40°C -40°FES–86 3AZ-FXE 发动机控制系统 SFI 系统如果存在短路智能检测仪显示 140°C 284°FB 转至步骤 4C 检查是否存在间歇性故障参见 ES-12 页A2 使用智能检测仪读取值检查线束是否断路a 断开发动机冷却液温度传感器连接器1 b 连接发动机冷却液温度传感器线束侧连接器的端子 1 和 2ES 2 c 将智能检测仪连接到 DLC3d 将电源开关置于 ON IG 位置e 打开检测仪2f 进入以下菜单Powertrain Engine and ECT Data ListTHW1 Coolant TempETHW g 读取显示在检测仪上的值插图文字1 发动机冷却液温度传感器2 混合动力车辆控制 ECU3 3 线束连接器前视图至发动机冷却液温度传感器标准值140°C 284°FC4 h 重新连接发动机冷却液温度传感器连接器异常转至步骤 3A206246E05正常更换发动机冷却液温度传感器参见 ES-267 页3 检查线束和连接器发动机冷却液温度传感器 - HV 控制 ECUa 断开发动机冷却液温度传感器连接器b 断开混合动力车辆控制ECU 连接器c 根据下表中的值测量电阻标准电阻断路检查检测仪连接条件规定状态C4-2 - C64-60 THW 始终小于 1 ΩC4-1 - C64-46 ETHW 始终小于 1 Ω3AZ-FXE 发动机控制系统SFI 系统ES–87d 重新连接发动机冷却液温度传感器连接器e 重新连接混合动力车辆控制 ECU 连接器异常维修或更换线束或连接器发动机冷却液温度传感器 - HV 控制ECU正常更换混合动力车辆控制 ECU 参见 HV-636 页4 使用智能检测仪读取值检查线束是否短路ESa 断开发动机冷却液温度传感器连接器b 将智能检测仪连接到 DLC31 c 将电源开关置于 ON IG 位置d 打开检测仪2e 进入以下菜单Powertrain Engine and ECT Data ListCoolant Tempf 读取显示在检测仪上的值THW 插图文字1 发动机冷却液温度传感器ETHW 2 混合动力车辆控制 ECU标准值-40°C -40°Fg 重新连接发动机冷却液温度传感器连接器A188268E07异常转至步骤 5正常更换发动机冷却液温度传感器参见 ES-267 页5 检查线束和连接器发动机冷却液温度传感器 - HV 控制 ECUa 断开发动机冷却液温度传感器连接器b 断开混合动力车辆控制 ECU 连接器c 根据下表中的值测量电阻标准电阻短路检查检测仪连接条件规定状态C4-2 或C64-60 THW - 车身搭铁始终10 kΩ或更大d 重新连接发动机冷却液温度传感器连接器ES–88 3AZ-FXE 发动机控制系统 SFI 系统e 重新连接混合动力车辆控制ECU 连接器异常维修或更换线束或连接器发动机冷却液温度传感器- HV 控制 ECU正常更换混合动力车辆控制 ECU 参见 HV-636 页ES3AZ-FXE 发动机控制系统SFI 系统ES–89DTC P0116 发动机冷却液温度电路范围性能故障描述请参考 DTC P0115 参见 ES-84 页DTC 编号DTC 检测条件故障部位发动机起动且满足条件 a 和 b 双程检测逻辑时发动机冷却液温度在-40°C 和 60°C -40°F 和140°F之间节温器P0116a 车辆变速行驶加速和减速发动机冷却液温度传感器b 发动机冷却液温度保持在发动机冷却液初始温度的3°C 54°F 范围内ES检查程序提示如果 DTC P0115 P0117 或 P0118 中的任一个与 DTC P0116 同时设定发动机冷却液温度传感器可能断路或短路首先对这些 DTC 进行故障排除使用智能检测仪读取定格数据存储 DTC 时混合动力车辆控制 ECU 将车辆和驾驶条件信息记录为定格数据进行故障排除时定格数据以及故障出现时所记录的其他数据有助于确定车辆是运行还是停止发动机是暖机还是未暖机空燃比是稀还是浓1 检查是否输出其他 DTC 除 DTC P0116 外a 将智能检测仪连接到 DLC3b 将电源开关置于 ON IG 位置c 打开检测仪d 进入以下菜单PowertrainEngine and ECT DTCe 读取 DTC结果结果转至输出DTC P0116 A输出DTC P0116 和其他DTCB提示如果除 P0116 外还输出了其他DTC 应首先对其他 DTC进行故障排除B 转至DTC 表参见ES-39 页A2 检查节温器a 拆下节温器参见 CO-24 页b 测量节温器阀门开启温度标准值80°C 至84°C 176°F 至183°FES–90 3AZ-FXE 发动机控制系统 SFI 系统提示除以上检查外确认阀门在温度低于标准时完全关闭c 重新安装节温器参见 CO-25 页异常更换节温器参见CO-24 页正常更换发动机冷却液温度传感器参见 ES-267 页ES3AZ-FXE 发动机控制系统SFI 系统ES–91DTC P0120 节气门踏板位置传感器开关A 电路故障节气门踏板位置传感器开关A 电路范围DTC P0121性能故障DTC P0122 节气门踏板位置传感器开关A 电路低输入DTC P0123 节气门踏板位置传感器开关A 电路高输入DTC P0220 节气门踏板位置传感器开关B电路ESDTC P0222 节气门踏板位置传感器开关B电路低输入DTC P0223 节气门踏板位置传感器开关B电路高输入节气门踏板位置传感器开关 A BDTC P2135电压相关性描述提示这些 DTC 与节气门位置传感器有关节气门位置传感器安装在节气门体总成上检测节气门开度此传感器为非接触型传感器它使用霍尔效应元件以便在极端的驾驶条件下如高速以及超低速时也能生成精确的信号节气门位置传感器有两个传感器电路 VTA1 和 VTA2 各传送一个信号VTA1用于检测节气门开度VTA2用于检测 VTA1 的故障传感器信号电压与节气门开度成比例在 0 V 和 5 V之间变化并且传输至混合动力车辆控制 ECU 的端子 VTA1节气门关闭时传感器输出电压降低节气门打开时传感器输出电压升高混合动力车辆控制 ECU 根据这些信号来计算节气门开度并响应驾驶员输入来控制节气门执行器这些信号同时也用来计算空燃比修正值功率提高修正值和燃油切断控制ES–92 3AZ-FXE 发动机控制系统 SFI 系统VTA2 x 08V50465VTA21 IC2575VCTA 225ES111 VVTA1 095 VTA069VTA265ETA84°2 ICECUVTA10 22VTA VTA2 x 08 111 V64 9619 65° VTA2 x 08 VTA 111 VA210557E41DTC 编号DTC 检测条件故障部位VTA 的输出电压快速波动并超出上下故障阈值持续 2 秒或节气门位置传感器内置于节气门体总成P0120 更长时间混合动力车辆控制 ECU单程检测逻辑节气门位置传感器内置于节气门体总成VTA 和 VTA2 之间的电压差低于 08 V 或高于 16 V 持续2 秒P0121 节气门位置传感器电路单程检测逻辑混合动力车辆控制 ECU节气门位置传感器内置于节气门体总成VTA 的输出电压为 02 V 或更低持续 2 秒或更长时间VTA 电路短路P0122单程检测逻辑 VCTA 电路断路混合动力车辆控制 ECU节气门位置传感器内置于节气门体总成VTA 电路断路VTA 的输出电压为 454 V 或更高持续 2 秒或更长时间P0123 ETA 电路断路单程检测逻辑VCTA 和VTA 电路之间短路混合动力车辆控制 ECU3AZ-FXE 发动机控制系统SFI 系统ES–93DTC 编号DTC 检测条件故障部位VTA2 的输出电压快速波动并超出上下故障阈值持续 2 秒或节气门位置传感器内置于节气门体总成P0220 更长时间混合动力车辆控制 ECU单程检测逻辑节气门位置传感器内置于节气门体总成VTA2 的输出电压为175 V 或更低持续 2 秒或更长时间VTA2 电路短路P0222单程检测逻辑 VCTA 电路断路混合动力车辆控制 ECU节气门位置传感器内置于节气门体总成VTA2 的输出电压为 48 V 或更高且 VTA1 的输出电压在 02 V VTA2 电路断路P0223 和 202 V 之间持续 2 秒或更长时间 ETA 电路断路单程检测逻辑 VCTA 和VTA2 电路之间短路混合动力车辆控制 ECU满足以下任一条件单程检测逻辑ESa VTA 和 VTA2 输出电压之间的差值为 002 V 或更低持续VTA 和 VTA2 电路之间短路P2135 05 秒或更长时间节气门位置传感器内置于节气门体总成b VTA 的输出电压为 02 V 或更低且 VTA2 的输出电压为混合动力车辆控制 ECU175 V 或更低持续 04 秒或更长时间失效保护存储这些 DTC 中的任何一个和与电子节气门控制系统故障有关的其他 DTC 时混合动力车辆控制 ECU进入失效保护模式在失效保护模式下混合动力车辆控制 ECU 切断流向节气门执行器的电流且节气。
3A6927CZH安装和操作SDP8/SDP18 预设计量分配阀Pulse FC 已启用用于分配机油、自动变速器油液(ATF )、齿轮油和防冻液。
未获准用于爆炸性环境或危险场所。
仅适合专业用途。
有关型号信息,请参见第 6 页。
最大工作压力为 1500 磅/平方英寸(10 兆帕,103 巴)重要安全说明请在使用该设备之前,阅读本手册以及相关系统手册内所有的警告和说明内容。
妥善保存所有说明。
本计量分配阀仅设计用于分配石油基润滑油和防冻液。
刹车清洁剂和/或强腐蚀性溶剂可能会损坏塑料部件。
目录警告 (4)型号 (6)概述 (7)计量分配阀 (7)导航板(图 1) (7)锁定和解锁扳机 (7)打开和关闭喷嘴 (8)典型安装 (9)安装支架 (9)机油架 (9)安装 (10)泄压流程 (10)接地 (10)预安装步骤 (10)冲洗 (11)安装计量分配阀 (11)安装加长管 (12)安装喷嘴 (12)预设模式 (13)主菜单屏幕 (13)校准 (13)手动校准 (15)替代校准 (16)分配 (18)预设分配 (19)总计 (21)实用程序菜单 (21)设备信息 (21)重置 (22)设置屏幕 (22)设备信息 (27)重置 (27)返回 (27)Pulse FC 模式 (28)启用 Pulse FC 模式 (28)激活 (29)校准 (29)手动校准 (30)分配 (31)屏幕识别 (31)实用程序菜单 (33)维修 (35)更换电池 (35)零配件 (36)零配件 (37)相关套件 (37)故障排除 (38)故障代码 (40)技术参数 (41)FCC / IC 通知 (42)Graco 5 年流量计和阀门保修 (43)警告以下为针对本设备的设置、使用、接地、维护及修理的警告。
惊叹号标志表示一般性警告,而各种危险标志则表示与特定操作过程有关的危险。
当手册中的这些符号出现在机身上,或是警告标牌上时,请查看这些警告。
艾瑞泽7加装宝吉星导航模块作业流程图
提了新车,想要加装导航模块,却不知道安装流程以及安装过程安全性如何。
是否无损安装,是否隐藏安装,会不会影响4S保修成为车友们最关心的问题。
给各位车友们分享加装宝吉星导航模块的全过程。
车型:14年艾瑞泽7
原车屏:触摸屏
安装功能:GPS导航、行车记录仪、倒车后视
实现功能:凯立德触摸屏GPS导航、倒车影像、行车记录仪、PM5
适合车型:艾瑞泽7、艾瑞泽5
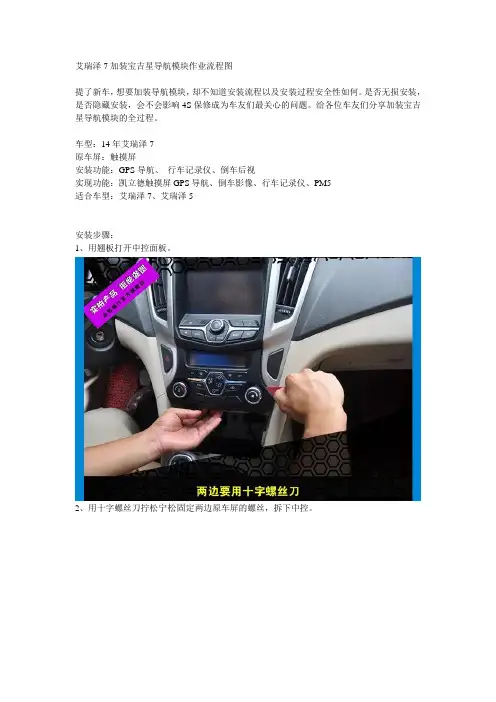
安装步骤:
1、用翘板打开中控面板。
2、用十字螺丝刀拧松宁松固定两边原车屏的螺丝,拆下中控。
3、整理原车线路的线头,将导航模块线路插头和原车线路插头进行对插。
4、检测安装效果。
5、测试没有问题后,安装行车记录仪。
将行车记录仪的数据线链接到模块专用视频输入转接线上。
安装后实现的的效果:
1、增加导航后,实现电子狗的功能,导航播报功能。
2、采用WINCE6.0操作系统,操作流畅,界面绚丽美观。
3、2D和3D地图随意切换,地图支持路口放大,路径规划,语音提示的功能,遇到复杂路口和隧道自动切换到3D实景模拟图。
内存成为有力的证据。

4th International Conference on Sensors, Measurement and Intelligent Materials (ICSMIM 2015)Design of Monitoring Platform of Hydraulic Support Operation PressureBased on ARM and CAN BusWei LI1, a, Cheng DING2,b1School of Mechanical Engineering, Anhui University of Science&Technology, Huainan,AnHui,China2Hefei Design Research Institute for Coal Industry, Hefei, Anhui,Chinaa*****************,b************************Keywords: hydraulic support; operation pressure; monitoring platform; CAN busAbstract.According to the shortages existed in current methods of monitoring on hydraulic support operation pressure, this paper developed a new monitoring system in which monitoring platform with multi-layer designed based on embedded system and CAN bus technology was introduced. The platform has integrated multi-function together, such as real-time monitoring, historical queries and communication in networks, to realize an intelligent monitoring on operation pressure by networks. IntroductionHydraulic supports are the main support equipment used in fully-mechanized coal face, of which operation pressure,due to the relation with ground pressure, is necessary for coal mine safety monitoring system.Traditional method of getting hydraulic supports operation pressure,that collecting pressure data periodically by worker from the self-recorder equipped in each hydraulic support and sending the data to ground control hub, is now no longer meet the demand of remote and dynamic monitoring system in modern coal mine. Except for the electro-hydraulic controlled support that could be detected real-timely, most hydraulic supports controlled by manual valves thus need to be equipped with operation pressure monitoring system.However, some problems have been found when the monitoring systems were applied, such as complex structure of hardware, redundant function, limited ability in data procession by RS-485 BUS, as well as heavy explosion-proof shell with bad cooling effect.This paper thus developed a new remote monitoring system of hydraulic support operation pressure based on ARM and CAN bus, with a compact structure and ability of dealing with mass data.Overall structure of systemThe overall structure of the system was composed of pressure monitoring sub-stations, monitoring platform and network server, as shown in figure 1.The sub-stations, including of pressure transducers and data acquisition card, played the role of measuring the operation pressure of each hydraulic support and sending the data to the upper monitoring platform by CAN bus. The platform connected low networks of CAN bus with top Ethernet ring networks, which could receive and process the data from the sub-station and give alarm at the case of overrun pressure, as well as package all the data received and send it to network switch through Ethernet interfaces. The server consist of network server, host computer and corresponding software. By matching IP address, the server could arrange and save different received message of coal face position, of hydraulic support operation pressure and of alarm, and provide the results for staff in control center to realize a real-time supervision and daily management.According to overall structure of the system, when applied in coal face, each pressure monitoring sub-station should be installed under the top beam of hydraulic support, and the pressure transducer was connected with the hydraulic oil chamber of props to obtain the value of pressure. All thesub-stations were connected one by one by cable to realize power provision and communication. The monitoring platform installed in cross-heading was connected with the nearest sub-station in order to collect and process the data from all the sub-stations by CAN bus. The data then was send to Ethernet switch through the use of TCP/IP protocol, so people in control centers of coal mine and of senior group could make remote and dynamic management on ground.1. flameproof power2. pressure monitoring sub-station3. hydraulic support4. monitoringplatform5. Ethernet switch6. other monitoring system7. industrial Ethernet-ring8. network severFig.1 Structure of hydraulic support pressure monitoring systemHardware design of monitoring platformAccording to the function of the platform, its hardware was designed as shown in figure 2. Inside the hardware, a chip of ARM (STM32F107VCT6 ) was chosen as microprocessor, whose minimum system include power circuit, clock circuit and reset circuit. In addition, JTAG debugging circuit, double CAN interfaces circuit, 10M/100M Ethernet interface circuit and module of touch screen, were also designed.Design of CAN bus moduleCAN bus is an useful field bus technology in distributed control and real-time control system with serial communication. Because CAN bus interface was integrated within STM32F107VCT6, another transceiver chip of SN65HVD230 was chosen due to its advantages of low power consumption, of good reliability and immunity to electromagnetic disturbance.The circuit of CAN bus module was shown in figure 3. In the circuit, output pin Tx of CAN controller was connected with input pin TXD of SN65HVD230 to send data into CAN network, while input pin Rx was connect with output pin RXD to receive data. A slope resistor (0~100kΩ) was connected with mode select port Rs to realize three operation mode switch.Ethernet communication moduleEthernet communication module was also integrated in STM32F107VCT6, meeting MAC Ethernet protocol of IEEE-802.3 standard, AMBA2.0 standard and RMII standard. The module could be adjusted flexibly for different application, and include a site interface of SMI to communicate with outsider by PHY.Electromagnetic anti-interference designAs for the monitoring platform was used in complex electromagnet environment underground, anti-interference measures has been applied in design of overall structure and PCB circuit, asconcluded in the following: Metal cabinet was used as the shell of the monitoring platform in order to shield it from electromagnetic filed. In connection the platform with the sub-station, cables and connector were unified. Four-layer board was applied in PCB circuit, in which the first and the fourth layer was signal layer, and the second was earthing and the third was power layer. Such layout had several advantages, including large wiring area, isolation signal from disturbance, reduction of characteristic resistance between the signal layer and power return path.Fig. 2 Hardware structure of monitoring platformFig. 3 Circuit of CAN bus module interfaceSoftware design of monitoring platformOperation system and development environmentAccording the hardware, µC/OS-II, one of the popular operation system for embedded system, as well as was integrated development environment of RealView MDK, was chosen to design software. Because µC/OS-II itself could not support peripheral units, such as document system, stack protocol and graphical interface, so the source code of µC/OS-II system was expanded before an embedded operation system with real-time multitask was developed.Tasks division of monitoring platformModules of the platform should be coordinated to realize an efficient real-time monitoring on operation pressure of hydraulic supports in the whole mechanized coal face. So, tasks of the platform were classified as 7 tasks, as shown in figure 4.Tasks 1-7 meant respectively as initialization task, communication through CAN bus, data display, process of touching keys, interfaces switch, sending data through Ethernet and process of LwIP network protocol stack.Software design of main functionIn order to operate µC/OS system, several functions, including OSInit( ), OSTaskStart( ), OS TimeSet( )and OS Start( ) should be called in turn. These functions consisted of main function which carried out according to the flow shown in figure 5.Fig.4 Classify of multitasks Fig.5 Flow of main functionDebugging of communication moduleAn CAN bus transceiver with USB interface was applied to debug data communication.When parameter was set correctly, the platform could receive the data send by the transceiver according to CAN bus protocol and display the data on screen. Figure 6 showed that data communication through CAN bus was succeed. Fig.6 Debugging result of data communicationConclusionThe monitoring platform of hydraulic support operation pressure, designed based on ARM and CAN bus technology, has integrated multi-function together, such as real-time monitoring, historicalqueries and communication in networks, to realize an intelligent monitoring on operation pressure by networks. It could be applied in safety monitoring system of coal mine due to its advantages of high precision, operation stability and low cost.References[1]SUN Ji-ping. Research of Key Technologies for Mine Safety and Efficiency Monitoring (InChinese)[J]. Industry and Mine Automation/Gong Kuang Zi Dong Hua, 2012, (12):1-5[2]LIU Ying, LIANG Yu, ZHANG Xiaoguang. Design of A Monitoring System for HydraulicSupports Based on ARM (In Chinese)[J]. /Kuang Shan Ji Xie. 2010, 38(11):6-10[3]Wang Kai. Design of Pressure Monitoring System for Hydraulic Support Based on LabVIEW(InChinese)[J]. Colliery Mechanical&Electrical Technology/Mei Kuang Ji Dian, 2015,(2):71-74 [4]DING En-jie, MENG Xiang, LI Xiao. etc. Design of Coal Mine Hydraulic Support PressureMonitoring System Based on Wireless Sensor Networks(In Chinese)[J]. Coal MineMachinery/Mei Kuang Ji Xie, 2010, 31(10):139-141[5]DING Cheng, MENG Guo-ying, CUI Guo-liang, etc. Design of The Monitoring System Platformof the Hydraulic Support Based on the ARM and CAN BUS (In Chinese)[J]. InstrumentTechnique and Sensor/Yi Biao Ji Shu Yu Chuan Gan Qi, 2012,(11):169-171。
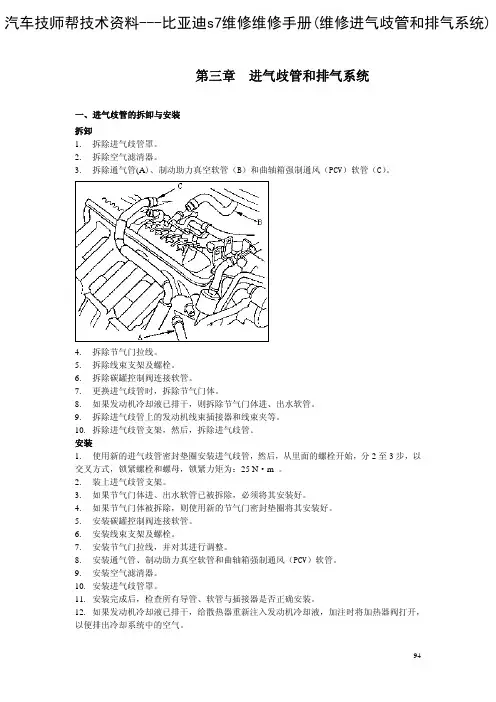
第三章进气歧管和排气系统一、进气歧管的拆卸与安装拆卸1.拆除进气歧管罩。
2.拆除空气滤清器。
3.拆除通气管(A)、制动助力真空软管(B)和曲轴箱强制通风(PCV)软管(C)。
4.拆除节气门拉线。
5.拆除线束支架及螺栓。
6.拆除碳罐控制阀连接软管。
7.更换进气歧管时,拆除节气门体。
8.如果发动机冷却液已排干,则拆除节气门体进、出水软管。
9.拆除进气歧管上的发动机线束插接器和线束夹等。
10.拆除进气歧管支架,然后,拆除进气歧管。
安装1.使用新的进气歧管密封垫圈安装进气歧管,然后,从里面的螺栓开始,分2至3步,以交叉方式,锁紧螺栓和螺母,锁紧力矩为:25 N·m 。
2.装上进气歧管支架。
3.如果节气门体进、出水软管已被拆除,必须将其安装好。
4.如果节气门体被拆除,则使用新的节气门密封垫圈将其安装好。
5.安装碳罐控制阀连接软管。
6.安装线束支架及螺栓。
7.安装节气门拉线,并对其进行调整。
8.安装通气管、制动助力真空软管和曲轴箱强制通风(PCV)软管。
9.安装空气滤清器。
10.安装进气歧管罩。
11.安装完成后,检查所有导管、软管与插接器是否正确安装。
12.如果发动机冷却液已排干,给散热器重新注入发动机冷却液,加注时将加热器阀打开,以便排出冷却系统中的空气。
二、排气歧管的拆卸与安装1.拆除排气歧管隔热罩及排气歧管支架,然后拆下排气歧管。
2.安装排气歧管,从里面的螺栓开始,分2至3步,以交叉方式,锁紧螺栓和螺母。
3.按与拆卸相反的顺序安装其他零件。
第四章发动机冷却系统组件位置索引一、调温器的检测如果室温下调温器打开,则更换调温器。
对闭合的调温器进行测试:1.将调温器(A)悬挂在一个装有水的容器内,不要让温度计(B)接触容器的底部与内壁。
2.将水加入,用温度计测量温度,检查调温器开始打开以及完全打开时的水温。
3.测量调温器完全打开时的提升高度。
标准调温器:提升高度:8.0mm以上开始打开:76℃~80℃完全打开:90℃二、水泵的检测1.拆除皮带。
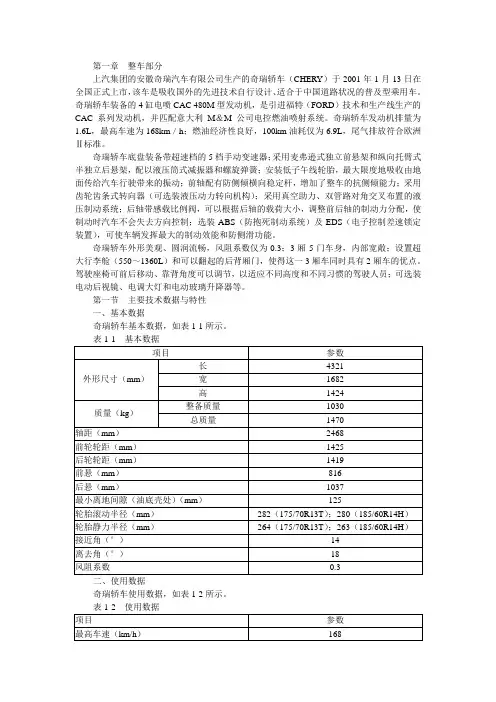
第一章整车部分上汽集团的安徽奇瑞汽车有限公司生产的奇瑞轿车(CHERY)于2001年1月13日在全国正式上市,该车是吸收国外的先进技术自行设计、适合于中国道路状况的普及型乘用车。
奇瑞轿车装备的4缸电喷CAC 480M型发动机,是引进福特(FORD)技术和生产线生产的CAC系列发动机,并匹配意大利M&M公司电控燃油喷射系统。
奇瑞轿车发动机排量为1.6L,最高车速为168km/h;燃油经济性良好,100km油耗仅为6.9L,尾气排放符合欧洲Ⅱ标准。
奇瑞轿车底盘装备带超速档的5档手动变速器;采用麦弗逊式独立前悬架和纵向托臂式半独立后悬架,配以液压筒式减振器和螺旋弹簧;安装低子午线轮胎,最大限度地吸收由地面传给汽车行驶带来的振动;前轴配有防侧倾横向稳定杆,增加了整车的抗侧倾能力;采用齿轮齿条式转向器(可选装液压动力转向机构);采用真空助力、双管路对角交叉布置的液压制动系统;后轴带感载比例阀,可以根据后轴的载荷大小,调整前后轴的制动力分配,使制动时汽车不会失去方向控制;选装ABS(防抱死制动系统)及EDS(电子控制差速锁定装置),可使车辆发挥最大的制动效能和防侧滑功能。
奇瑞轿车外形美观、圆润流畅,风阻系数仅为0.3;3厢5门车身,内部宽敞;设置超大行李舱(550~1360L)和可以翻起的后背厢门,使得这一3厢车同时具有2厢车的优点。
驾驶座椅可前后移动、靠背角度可以调节,以适应不同高度和不同习惯的驾驶人员;可选装电动后视镜、电调大灯和电动玻璃升降器等。
第一节主要技术数据与特性一、基本数据奇瑞轿车基本数据,如表1-1所示。
二、使用数据奇瑞轿车使用数据,如表1-2所示。
表1-2 使用数据三、容量数据奇瑞轿车容量数据,如表1-3所示。
表1-3 容量数据四、结构数据奇瑞轿车结构数据,如表1-4所示。
表1-4 结构数据第二节汽车的使用一、钥匙有两把钥匙,主钥匙(不带电子锁止的主钥匙或带电子锁止的主钥匙),这把钥匙能开启车上所有的锁。
奇瑞M16维修手册(车身尺寸及附件部分)版本:01版编辑:吴允亮张思强时间:2013.08版本和更改说明:版本作者日期内容相对上一版本变更内容适用车型和配置01版吴允亮张思强2013年8月车身及内外饰备注:本资料在编写过程中,得到研究院工程师的支持,在此表示感谢!.由于编者水平有限,难免有遗漏或错误,欢迎给予指正.各个服务站使用此维修资料时,如发现有错误或疑问,请电话联系奇瑞汽车销售总公司售后服务部(国内)技术科未经本公司书面允许,不得复制、翻译或摘录.本公司明确保留按照法律规定有关版权的一切权利.奇瑞汽车销售总公司售后服务部2013年8月目录第一章前舱盖与行李箱盖拆装 (6)第一节前舱盖的拆装 (6)1、准备工作 (6)2、注意事项 (6)3、前舱盖附件的拆装 (6)4、前舱盖总成的拆卸与调整 (7)5、前舱盖锁的调整与安装 (7)第二节行李箱盖的拆装 (8)1、准备工作 (8)2、行李箱锁芯的拆装 (8)3、行李箱盖的拆装 (9)第二章内饰件拆装 (10)第一节安全带的拆装 (10)1、准备工作 (10)2、注意事项 (10)3、拆卸步骤 (10)4、安装步骤 (12)第二节座椅的拆装 (13)1、准备工作 (13)2、注意事项 (13)3、前座椅拆装步骤 (13)4、后座椅拆装步骤 (14)第三节扶手箱和副仪表板的拆装 (16)1、准备工作 (16)2、注意事项 (16)3、拆卸步骤 (16)4、安装步骤 (19)第四节地毯的拆装 (20)1、准备工作 (20)2、注意事项 (20)3、拆卸步骤 (20)4、安装步骤 (20)第三章车门的拆装与维修 (21)第一节前门的拆装与维修 (21)1、系统组成图 (21)2、准备工作 (22)3、注意事项 (22)4、拆卸步骤 (22)第二节后门的拆装与维修(以左后门为例) (29)1、准备工作 (29)2、注意事项 (29)3、拆卸步骤 (29)4、安装与调整步骤 (35)第四章前后保险杠的拆装与维修 (36)第一节前保险杠的拆装 (36)1、准备工作 (36)2、注意事项 (36)3、拆卸步骤 (36)4、安装与维修 (37)第二节后保险杠的拆装与维修 (38)1、准备工作 (38)2、注意事项 (38)3、拆卸步骤 (38)4、安装步骤 (39)第五章前大灯和雾灯的拆装与维修 (40)1、准备工作 (40)2、注意事项 (40)3、前大灯的拆卸步骤 (40)4、雾灯的拆卸 (42)5、前大灯与雾灯的安装 (42)第六章顶棚的拆装 (43)1、准备工作 (43)2、注意事项 (43)3、遮阳板拆装 (43)4、乘客扶手拆装 (44)5、前顶灯拆装 (45)6、后顶灯拆装 (46)7、后固定座拆装 (47)8、A柱护板拆装 (47)9、B柱护板拆装 (48)10、C柱护板拆装 (49)11、顶棚的拆装 (50)第七章天窗的拆装 (51)1、准备工作 (51)2、注意事项 (51)3、天窗总成拆装 (51)第七章仪表台的拆装 (53)一、仪表台附件的拆装 (53)1、准备工作 (53)2、注意事项 (53)3、中央控制面板的拆装 (53)4、仪表拆装 (54)5、手套箱的拆装 (55)二、仪表台总成的拆卸 (56)1、仪表台的拆装 (56)三、低频天线的拆卸 (59)1.低频天线拆卸 (59)1.1拆卸步骤 (59)第八章空调系统 (62)一、系统组成 (62)二、蒸发器总成拆卸 (63)1、准备工作 (63)2、注意事项 (63)3、拆卸步骤 (64)4、蒸发器总成安装 (66)第九章车身尺寸 (67)第一节车身装配尺寸 (67)第二节发动机舱开口及风窗开口尺寸 (94)第三节行李箱开口尺寸 (96)第四节车身B柱与C柱间距尺寸 (97)第五节前、后门开口尺寸 (99)第一章前舱盖与行李箱盖拆装第一节前舱盖的拆装1、准备工作工具:7#套筒扳手、10#套筒扳手、13#套筒扳手、内饰翘板专用工具2、注意事项2.1、佩戴必要的劳保用品,以免发生意外事故,安全第一。
售后服务3修理手册Golf A7 2014 ▶, Magotan B8L 2016 ▶2.0L 四缸四气阀涡轮增压直喷发动机(第三代)版本 07.2016发动机代码CHHB CUGA售后服务技术信息维修手册修理组Golf A7 2014 ▶, Magotan B8L 2016 ▶2.0L 四缸四气阀涡轮增压直喷发动机(第三代)版本 07.2016请在存放技术须知前将此须知编号填入相应的修理组后方。
如此您可以在使用维修手册时对存有技术须知的要点处一目了然。
修理组技术须知00 技术数据10 拆装发动机13 曲柄连杆机构15 气缸盖, 气门机构17 润滑19 冷却系统21 涡轮增压/增压24 混合气预备 - 喷射装置26 排气装置28 点火装置工长和机工必需掌握所有技术信息。
因为认真和持久地维护并遵循注意事项是保证车辆行驶和安全的基本条件。
此外在维修时也要遵循维修安全的基本原则。
3售后服务版权所有。
不经法人同意不得使用。
Copyright © 2016 Volkswagen AG, Wolfsburg德国印刷FAW5R0002.74目录技术数据 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11安全提示 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11.1在燃油供应装置上进行作业时的安全措施 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11.2对配备自动起停系统的车辆作业时的安全措施 . . . . . . . . . . . . . . . . . . . . . . . . . . .11.3使用检测仪进行试驾的安全措施 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11.4在点火装置上进行作业时的安全措施 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21.5在冷却系统上操作的安全措施 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21.6释放燃油系统中的高压 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22标识 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32.1发动机编号 / 发动机特征 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33维修提示说明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43.1清洁规定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43.2发动机内的杂质 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53.3接触腐蚀 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53.4管路铺设和固定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53.5散热器和冷凝器的装配 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53.6检测真空系统 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5拆装发动机 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61拆卸和安装发动机 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61.1拆卸发动机 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61.2脱开发动机和 7 档双离合器变速箱 0DE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .171.3将发动机固定到发动机和变速箱支架上 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .191.4安装发动机 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .202机组支承 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .232.1装配一览 - 机组支承 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .242.2安装发动机支撑装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .252.3拆卸和安装发动机支座 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .282.4拆卸和安装变速箱支座 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .292.5拆卸和安装摆动支承 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .302.6检查机组支承的调整 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .312.7调整机组支承 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31曲柄连杆机构 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .331皮带轮侧气缸体 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .331.1装配一览 - 皮带轮侧传动机构 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .331.2拆卸和安装多楔皮带 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .351.3拆卸和安装多楔皮带张紧装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3700 -10 -13 -Golf A7 2014 ▶, Magotan B8L 2016 ▶2.0L 四缸四气阀涡轮增压直喷发动机(第三代) 07.20163目录iii1.4拆卸和安装减震器 / 曲轴皮带轮 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .371.5拆卸和安装辅助总成支架 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .421.6拆卸和安装发动机支撑件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .452变速箱侧气缸体 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .462.1装配一览 - 变速箱侧气缸体 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .462.2拆卸和安装双质量飞轮 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .472.3拆卸和安装变速箱侧密封法兰 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .483曲轴 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .503.1曲轴 - 装配一览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .513.2曲轴尺寸 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .523.3匹配主轴瓦 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .523.4更换曲轴上的滚针轴承 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .533.5测量曲轴的轴向间隙 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .563.6测量曲轴的径向间隙 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .573.7拆卸和安装脉冲信号轮 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .574平衡轴 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .584.1装配一览 - 平衡轴 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .594.2拆卸和安装平衡轴 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .604.2.1拆卸和安装进气侧平衡轴 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .604.2.2拆卸和安装排气侧平衡轴 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .624.3更换进气侧平衡轴密封圈 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .645活塞和连杆 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .655.1活塞和连杆 - 装配一览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .665.2拆卸和安装活塞 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .675.3拆卸和安装机油喷嘴 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .685.4检查活塞和气缸内径 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .695.5脱开新的连杆 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .705.6检查连杆径向间隙 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .71气缸盖, 气门机构 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .721气缸盖 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .721.1装配一览 - 气缸盖 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .731.2拆卸和安装气缸盖 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .751.3拆卸和安装真空泵 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .771.4检测压缩压力 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .792正时链盖板 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .802.1装配一览 - 正时链盖板 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .812.2拆卸和安装凸轮轴调节阀 1 -N205-和排气凸轮轴调节阀 1 -N318- . . . . . . . . . . . . . .822.3拆卸和安装正时链上部盖板 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8215 -3Golf A7 2014 ▶, Magotan B8L 2016 ▶2.0L 四缸四气阀涡轮增压直喷发动机(第三代) 07.2016iv目录2.4拆卸和安装正时链下部盖板 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .842.5更换皮带轮侧的密封圈 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .873链条传动机构 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .893.1装配一览 - 凸轮轴正时链 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .903.2拆卸和安装凸轮轴正时链 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .923.3安装一览 - 平衡轴传动链 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1053.4拆卸和安装平衡轴传动链 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1063.5检查正时链 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1063.6检查配气相位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1074气门机构 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1094.1气门机构 - 装配一览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1094.2拆卸和安装凸轮轴 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1134.3安装滑动件滚珠 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1254.4拆卸和安装气门杆密封件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1265进气门和排气门 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1295.1检测气门导管 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1305.2检查气门 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1305.3气门尺寸 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .131润滑 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1321油底壳,机油泵 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1321.1油底壳和机油泵 - 装配一览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1331.2拆卸和安装油位和油温传感器 -G266- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1351.3拆卸和安装油底壳下部件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1361.4拆卸和安装机油泵 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1371.5拆卸和安装油底壳上部件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1391.6发动机机油 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1432发动机机油冷却器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1432.1发动机机油冷却器 - 装配一览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1442.2拆卸和安装发动机机油冷却器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1442.3拆卸和安装机械开关阀 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1453曲轴箱通气口 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1453.1曲轴箱通气系统 - 装配一览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1463.2拆卸和安装油气分离器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1464机油滤清器,油压开关 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1474.1装配一览 - 机油滤清器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1484.2装配一览 - 油压开关 / 油压调节 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1494.3拆卸和安装活塞冷却喷嘴控制阀 -N522- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1504.4拆卸和安装机油压力调节阀 -N428- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15117 -Golf A7 2014 ▶, Magotan B8L 2016 ▶2.0L 四缸四气阀涡轮增压直喷发动机(第三代) 07.20163目录v4.5拆卸和安装油压开关 -F22- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1524.6拆卸和安装机油压力降低开关 -F378- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1524.7拆卸和安装油压开关,3 档 -F447- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1534.8检查机油压力 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1544.8.1检查发动机机油压力 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1554.8.2检查活塞冷却喷嘴机油压力 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .157冷却系统 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1591冷却系统 / 冷却液 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1591.1冷却液软管连接图 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1601.2排放和加注冷却液 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1611.3检测冷却系统的密封性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1652冷却液泵 / 冷却液调节装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1662.1装配一览 - 冷却液泵 / 冷却液调节装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1672.2装配一览 - 电动冷却液泵 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1692.3装配一览 - 冷却液温度传感器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1712.4拆卸和安装冷却液泵的齿形皮带 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1712.5拆卸和安装冷却液泵 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1742.6拆卸和安装冷却液电动泵 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1762.6.1拆卸和安装冷却液继续补给泵 -V51- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1762.6.2拆卸和安装增压空气冷却泵 -V188- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1782.7拆卸和安装冷却液断流阀 -N82- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1802.8拆卸和安装变速箱冷却液阀 -N488- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1812.9拆卸和安装发动机温度调节伺服元件 -N493- . . . . . . . . . . . . . . . . . . . . . . . . . . . .1832.10拆卸和安装冷却液温度传感器 -G62- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1842.11拆卸和安装散热器出口处的冷却液温度传感器 -G83- . . . . . . . . . . . . . . . . . . . . . . .1863冷却液管 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1863.1装配一览 - 冷却液管 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1873.2拆卸和安装前冷却液管 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1873.3拆卸和安装上部冷却液管 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1894散热器 / 散热器风扇 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1914.1装配一览 - 散热器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1914.2装配一览 - 风扇护罩和散热器风扇 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1924.2.1装配一览 - 风扇护罩和散热器风扇(仅用于 Golf A7 的车辆) . . . . . . . . . . . . . . . .1934.2.2装配一览 - 风扇护罩和散热器风扇(仅用于 Magotan B8L 的车辆) . . . . . . . . . . . . .1944.3拆卸和安装散热器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1944.4拆卸和安装风扇护罩 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1974.5拆卸和安装散热器风扇(仅用于 Magotan B8L 的车辆) . . . . . . . . . . . . . . . . . . . . .1994.6拆卸和安装散热器风扇(仅用于 Golf A7 的车辆) . . . . . . . . . . . . . . . . . . . . . . .2004.6.1拆卸和安装散热器风扇 -V7- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20019 -3Golf A7 2014 ▶, Magotan B8L 2016 ▶2.0L 四缸四气阀涡轮增压直喷发动机(第三代) 07.2016vi目录4.6.2拆卸和安装散热器风扇 -V177- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .200涡轮增压/增压 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2021涡轮增压器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2021.1废气涡轮增压器 - 装配一览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2031.2拆卸和安装废气涡轮增压器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2051.3调整增压调节器 -V465- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2112增压空气系统 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2122.1增压空气系统 - 装配一览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2132.2增压空气软管接头 - 装配一览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2142.3拆卸和安装增压空气冷却器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2142.4拆卸和安装增压压力传感器 -G31- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2152.5检查增压空气系统是否有泄漏 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .216混合气预备 - 喷射装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2181喷射系统 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2181.1安装位置一览 - 喷射装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2181.1.1安装位置一览 - 发动机舱电气元件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2222喷油器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2262.1装配一览 - 带喷油器的燃油分配器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2262.1.1装配一览 - 带直喷喷油器的燃油分配器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2272.1.2装配一览 - 带进气歧管喷射喷油器的燃油分配器 . . . . . . . . . . . . . . . . . . . . . . . . .2282.2拆卸和安装燃油分配器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2282.3拆卸和安装喷油器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2292.3.1拆卸和安装直喷喷油器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2292.3.2拆卸和安装进气歧管喷射喷油器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2332.4更换喷油器上的密封环 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2352.5清洗喷油器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2363空气滤清器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2373.1空气滤清器壳体 - 装配一览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2383.2拆卸和安装空气滤清器壳体 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2394进气歧管 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2394.1进气歧管 - 装配一览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2404.2拆卸和安装进气歧管 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2414.3拆卸和安装节气门控制单元 -GX3- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2474.4清洁节气门控制单元 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2495传感器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2495.1拆卸和安装燃油压力传感器 -G247- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2495.2检查燃油压力传感器 -G247- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2525.3拆卸和安装低压的燃油压力传感器 -G410- . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25421 -24 -Golf A7 2014 ▶, Magotan B8L 2016 ▶2.0L 四缸四气阀涡轮增压直喷发动机(第三代) 07.20163目录vii5.4拆卸和安装进气管传感器 -GX9- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2556发动机控制单元 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2566.1拆卸和安装发动机控制单元 -J623- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2566.2拆卸和安装发动机控制单元支架 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2577高压油泵 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2577.1高压油泵 - 装配一览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2587.2拆卸和安装高压油泵 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2598氧传感器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2628.1装配一览 - 氧传感器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2638.2拆卸和安装尾气催化净化器前的氧传感器 1 -GX10- . . . . . . . . . . . . . . . . . . . . . . .2648.3拆卸和安装尾气催化净化器后的氧传感器 1 -GX7- . . . . . . . . . . . . . . . . . . . . . . . .266排气装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2681排气管 / 消音器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2681.1装配一览 - 消音器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2681.1.1装配一览 - 消音器(仅用于 Magotan B8L 的车辆) . . . . . . . . . . . . . . . . . . . . . . .2691.1.2装配一览 - 消音器(仅用于 Golf A7 的车辆) . . . . . . . . . . . . . . . . . . . . . . . . . .2701.2拆卸和安装消音器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2711.2.1拆卸和安装消音器(仅用于 Magotan B8L 的车辆) . . . . . . . . . . . . . . . . . . . . . . .2711.2.2拆卸和安装消音器(仅用于 Golf A7 的车辆) . . . . . . . . . . . . . . . . . . . . . . . . . .2721.3脱开排气管 / 消音器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2731.3.1脱开排气管 / 消音器(仅用于 Magotan B8L 的车辆) . . . . . . . . . . . . . . . . . . . . .2731.3.2脱开排气管 / 消音器(仅用于 Golf A7 的车辆) . . . . . . . . . . . . . . . . . . . . . . . .2751.4无应力安装排气装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2771.5检查排气装置的密封性: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2782尾气催化净化器装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2782.1尾气催化净化器及安装件 - 装配一览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2792.2拆卸和安装带尾气催化净化器的排气前管 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .281点火装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2851点火装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2851.1点火装置 - 装配一览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2851.2拆卸和安装带功率输出级的点火线圈 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2861.3拆卸和安装爆震传感器 1 -G61- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2891.4拆卸和安装霍尔传感器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2891.4.1拆卸和安装霍尔传感器 -G40- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2901.4.2拆卸和安装霍尔传感器 3 -G300- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2901.5拆卸和安装发动机转速传感器 -G28- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29126 -28 -3Golf A7 2014 ▶, Magotan B8L 2016 ▶2.0L 四缸四气阀涡轮增压直喷发动机(第三代) 07.2016viii目录。
目录前言 (2)第一章电喷系统维修须知 (3)第二章 ME17系统介绍 (7)第三章ME17系统零部件结构、原理及故障分析 (12)第四章ME17系统根据故障代码进行检修的诊断流程 (42)第五章ME17系统根据故障现象进行检修的诊断流程 (56)第六章BYD-ED400汽车故障诊断仪使用说明 (66)第七章附件 (77)前言随着我国国民经济的发展,汽车保有量不断增加,环保法规也在不断地严格化。
由于闭环控制的汽油定量技术跟三效催化转化器相结合有可能将汽车排放的有毒物质减少92%以上,所以用电子控制汽油喷射技术取代化油器已经成为不可逆转的发展趋势。
这表明,在中国汽车行业中,化油器发动机的时代已经结束,电子控制汽油喷射发动机的时代已经开始。
比亚迪473Q发动机配备的发动机管理系统是联合汽车电子有限公司提供的MOTRONIC系统。
联合汽车电子有限公司作为国内最大、最有影响的汽车发动机电子控制汽油喷射系统的供应商,从1996年开始向国内各大汽车公司提供从德国BOSCH公司引进的MOTRONIC系列电喷系统及其零部件。
所谓MOTRONIC,是一种商品名,并不具备特定的含义。
MOTRONIC系统具有一定的技术特点,这就是,发动机的燃油定量电子控制和点火正时电子控制系统合二为一,原来分开的两个系统共享一套传感器、电子控制单元和电源装置。
不言而喻,MOTRONIC系统都具备点火正时电子控制功能。
这使得发动机的性能有了明显的改善。
MOTRONIC系统跟其它电子控制汽油喷射系统一样,一方面可以大幅度地降低汽车排放,另一方面也给只熟悉传统化油器发动机的维修人员在发动机维修的时候带来了困难。
汽车维修人员对化油器发动机觉得看得见、摸得到。
但是,电子控制汽油喷射发动机中不见了人们原先熟悉的一些机械组件,代之以各种电子组件。
原先,维修人员甚至驾驶人员有可能自行调整化油器或分电器;但是,现在数据储存在计算机芯片里,一般维修人员并不能通过电子仪器对数据进行修改来排除故障。
奇瑞艾瑞泽7 PEPS被动进入启动系统原理与维修指南版本:01版编辑:程灿雄审核:批准:时间:2013年8月8日版本和更改说明:版本 作者 审核 日期 内容 相对上一版本变更内容 适用车型和配置01版 程灿雄 2013年8月8日PEPS系统 艾瑞泽7舒适、豪华型备注:1、若需要查找电路图,因车型配置不同相应电路图可能存在差异,请对应参考各个服务站使用此指南时,如发现有错误或疑问,请电话联系奇瑞汽车销售有限公司售后服务部(国内)技术科。
未经本公司书面同意,不得复制、翻译或摘录。
本公司明确保留按照法律规定有关版权的一切权利。
安徽奇瑞汽车销售有限公司售后服务部2013年8月8 日目录第一章 功能介绍 (4)一、简介 (4)二、功能、原理描述 (13)第二章 维修操作注意事项 (20)2.1、遥控钥匙更换 (20)2.2、智能无钥匙进入操作注意事项 (21)2.3、启动开关操作注意事项 (21)2.4、智能无钥匙进入及一键启动系统提示信息 (21)2.5、防盗系统注意事项 (22)第三章 维修指南 (26)一、系统电路原理图 (26)二、零部件端子定义 (28)2.1、低频天线(室内3个、后保险杠侧1个) (28)2.2、左右前门把手传感器 (28)2.3、防盗线圈 (29)2.4、PEPS控制器 (29)2.5、一键启动/停止开关 (35)2.6、电子转向柱锁(ESCL模块,MT车型PEPS系统配置) (35)2.7、离合器底部开关 (36)2.8、后备箱开启开关 (37)第四章 PEPS故障码分析处理 (37)一、诊断流程 (37)二、无故障码故障维修 (38)三、偶发故障维修 (38)四、故障码分析 (39)4.1、故障码表 (39)第五章 诊断仪关于PEPS系统菜单操作说明 (40)一、X431主要功能目录 (40)二、操作步骤和菜单说明 (40)第六章、PEPS系统组成部件拆卸与安装 (45)一、被动启动控制系统主要组成部件拆卸与安装 (45)1.1、被动启动控制器与支架 (45)1.2、低频天线 (47)1.3、防盗线圈 (52)二、被动启动控制系统附件拆卸与安装 (53)2.1、启动开关的安装与拆卸 (53)2.2、电子转向柱锁的安装与拆卸 (54)2.3、后备门微动开启开关总成的安装与拆卸 (55)2.4、离合器底部开关拆卸与安装 (56)第一章 功能介绍一、简介1.1、PEPS 的英文全称是 Passive Entry And Passive Start(被动进入启动系统),被动进入启动系统是在传统通过钥匙进入与启动的基础上发展而来的。
奇瑞艾瑞泽7 EPS系统维修手册版本:01版编制:程灿雄审核:批准:时间:2013年8月8日版本和更改说明:版本 作者 日期 内容 相对上一版适用车型和配置本变更内容01版 程灿雄 2013年8月8日EPS部分 M16车型备注:1、本资料主要内容为M16车型 EPS系统维修指导手册,主要用于M16 舒适型和豪华型配置2、本资料主要来源于研究院提供的资料编制的由于编者水平有限,难免有遗漏或错误,欢迎给予指正.各个服务站使用此维修资料时,如发现有错误或疑问,请电话联系奇瑞汽车销售总公司售后服务部(国内)技术科。
未经本公司书面允许,不得复制、翻译或摘录.本公司明确保留按照法律规定有关版权的一切权利。
奇瑞汽车销售总公司售后服务部2013 年8月8 日目录第一章 EPS系统介绍 (4)一、EPS工作原理 (4)二、EPS产品结构 (5)2.1、总览图 (5)2.2、结构分解图 (5)三、EPS电气系统 (7)3.1、电气原理图 (7)3.2、EPS模块插接件针脚定义 (8)3.3、电源供给 (9)第二章 故障诊断与分析 (10)一、故障诊断 (10)1.1、诊断流程图 (10)1.2、典型故障代码 (11)二、诊断仪操作菜单使用与说明 (11)第三章 电动助力转向管柱带中间轴总成装配与调整 (15)一、电动助力管柱带中间轴总成装配 (15)二、转向器的安装 (17)三、转向器的调整 (18)四、注意事项 (18)第五章 搬运操作指南 (19)第一章 EPS系统介绍一、EPS工作原理当驾驶员转动方向盘时,安装于转向管柱上的力矩传感器将检测到作用在方向盘上的力矩传给转向助力控制单元。
根据转向力矩、车速(由整车CAN线提供)、方向盘转角、方向盘转速等信息以及存储在控制单元中的特性曲线图,控制单元根据特定的算法计算出必要的助力力矩并控制电动机工作。
由电动机驱动管柱提供转向助力,从而驱动转向齿条工作。
1.1、工作示意图:驾驶员转向力EPS助力力矩EPS助力模块转向推力轮胎转向轮胎转向1.2、工作原理框图:图片英文解释:Steering wheel:方向盘 sensor signals:传感器信号 sensor power:传感器电源 ptical torque sensor :转向角扭矩传感器 power:电源 vehicle speed:车速vehicle status signals:车辆状态信号 gearbox:齿轮箱motor:马达电机 motor drive:马达电机驱动motor position measurement:电动机位置反馈输入 rack:齿条二、EPS产品结构2.1、总览图③②⑤④-① 柱管总成:管理碰撞时系统溃缩路径与能量吸收;-② 调节手柄:通过松开手柄可实现方向盘角度调节,选择最优驾驶角度;-③ 无刷电机(Motor):按照控制器的指令输出所需助力扭,是EPS的动力源;-④ 控制器(ECU)总成:负责接收与下达内外部信号,控制助力扭矩的大小;-⑤ 中间轴总成:EPS助力传递部件;2.2、结构分解图分解图零件清单:序号 英文名称 中文名称1 SLEEVE, LOCK 锁止套2 RING LOCK SLEEVE 锁止套垫圈3 SHAFT, TUBULAR STEERING 转向管柱上轴4 BEARING ASM, UPPER STRG SHAFT 上转向轴轴承5 JACKET, UPPER 上柱管6 BUSHING, TELESCOPE 管状衬套7 RETAINER, PLATE 卡环8 JACKET, LOWER 下柱管9 PLATE, ASSIST MECH 助力装置盖板10 ASSIST ASM, MOTOR & CONTROLLER 助力器总成(电机与控制器)11 BOLT, PINCH 连接螺栓12 SHAFT ASM, INTER STRG 中间轴总成13 CAPSULE, STRG COLUMN SUPPORT 拉脱块14 STRAP, E/A 吸能钢带15 RETAINER, E/A STRAP 吸能钢带保持架16 BOLT, HEX HEAD 六角螺栓17 BRACKET, ANTI-ROTATION 防转支架18 NU, ANTI-ROTATION 防转螺母19 LEVER ASM, RAKE 调节手柄总成20 CAM, RAKE ADJUSTMENT 调节螺母21 BRACKET, RAKE 调节支架22 SPRING, RAKE 调节弹簧23 BRACKET, COMPRESSION 压缩支架24 BRACKET, SHROUD MTG 护罩支架25 BOLT, RAKE ADJUSTMENT 调节螺栓三、EPS电气系统3.2、EPS模块插接件针脚定义车辆电源:控制器电源插接件(电路原理图上定义为A插件)车辆信号:控制器信号插接件(电路原理图上定义为B插件)针脚 功能 线径 颜色 备注 1 IGN 信号 0.5 RG 2 CAN 1高 0.5 O 3 CAN 1低 0.5 OB4 无定义5 无定义6 信号地 0.5 Br7 无定义8 无定义9 无定义 10无定义针脚 功能 线径 颜色 备注 A电源正极6.0RB电源负极6.0 Br3.3、电源供给EPS系统使用电池作为其主要供电源。
奇瑞艾瑞泽7 转向角系统(SAS)维修指南
版本:01版
编制:程灿雄
审核:
批准:
时间:2013年8月8日
版本和更改说明:
版本 作者 日期 内容 相对上一版本变更内容 适用车型和配置
01版 程灿雄 2013年8月8日SAS部分 艾瑞泽7 车型
备注:
1、本资料主要内容为转向角系统(SAS)维修指导手册,主要用于艾瑞泽7配置ESP系统车型
2、本资料主要来源于研究院提供的资料和根据组合开关零件号收集的资料
由于编者水平有限,难免有遗漏或错误,欢迎给予指正.
各个服务站使用此维修资料时,如发现有错误或疑问,请电话联系奇瑞汽车销售总公司售后服务部(国内)技术科。
未经本公司书面允许,不得复制、翻译或摘录.本公司明确保留按照法律规定有关版权的一切权利。
奇瑞汽车销售总公司售后服务部
2013 年8月8 日
目录
第一章、转向角系统(SAS)介绍 (4)
1.1、方向盘转角传感器位置 (4)
1.2、方向盘转角传感器功能描述 (4)
1.3、方向盘转角传感器电气原理图 (5)
1.4、方向盘转角传感器端口针脚定义 (6)
第二章、故障诊断与分析 (7)
2.1、故障诊断流程图 (7)
第三章、X431诊断仪诊断转向角系统操作菜单与说明 (8)
3.1、X431诊断仪进入转向角系统菜单 (8)
3.2、转向角系统诊断菜单主要功能目录 (10)
3.3、艾瑞泽7方向盘转角传感器标定说明 (12)
第一章、转向角系统(SAS)介绍
1.1、方向盘转角传感器位置
方向盘转角传感器位于组合开关总成内,如下图所示
1.2、方向盘转角传感器功能描述
方向盘转角传感器检测方向盘转向角度信号,通过高速CAN 1 总线向ESP系统模块输入方向盘转角信号,作为
ESP模块正常工作的基本信号之一。
SAS 端口如下图所示
插接件针脚定义:
针脚 功能 线径 颜色 备注
1 CAN 1低 0.5 OB
2 CAN 1高 0.5 O
3 12V电源
4 接地
5 无定义
6 无定义
第二章、故障诊断与分析2.1、故障诊断流程图
第三章、X431诊断仪诊断转向角系统操作菜单与说明
3.1、X431诊断仪进入转向角系统菜单
3.1.1、接上诊断与车辆的通讯接口,钥匙打到ON档,打开诊断仪操作桌面,点击汽车诊断,进入车系选择菜单,如下图一所示:
图一
点击奇瑞车系,进入奇瑞车系版本菜单,选择最高版本V56.70,如下图二所示
图二
点击最高版本进入奇瑞车型选择菜单,如下图三所示
图三
点击艾瑞泽7车型,进入艾瑞泽7车型诊断菜单,如图四所示
图四
点击转向角系统,进入该系统诊断菜单,如下图五所示
图五
3.2、转向角系统诊断菜单主要功能目录
3.2.1、读故障码
3.2.2、清除故障码
3.2.3、读数据流
3.2.4、重新标定
3.2.5、初始标定
3.2.1、读故障码
执行该功能可以读取当前转向角系统故障码
3.2.2、清除故障码
如果读到故障码,可以用使用清除故障码功能进行清除。
如果清除之后,再次读取时又能读到的话,请查找故障原因。
故障排除之后再进行故障码清除,再次读取故障码确认故障是否排除。
如图5所示
3.2.3、读数据流
点击读数据流功能,可以读取当前转向角系统转向角状态,如下图七和图八所示
图七
图八 3.2.4、重新标定
执行该功能可以对转向角进行重新标定
3.2.5、初始标定
执行该功能可以对转向角进行初始化标定
注:更换组合开关需要对转向角传感器进行标定
3.3、艾瑞泽7方向盘转角传感器标定说明
1)传感器标定的前提条件:
●方向盘转角传感器在安装后,需要零点标定。
●标定需要在前轮(四轮)定位工位上完成。
(确保车辆的四轮定位参数正确)
●标定前,需将车辆摆正,车轮必须沿前进方向成直线,两者角度误差满足四轮定位参数中的前束值(数据详
见底盘维修手册相关内容),方向盘必须调整居中。
●需要对已经标定过的传感器进行再次标定之前,必须对传感器进行重新标定,即:使传感器返回未标定状态。
转角传感器标定
正确的前束值
说明:
FL:左前轮 RL:左后轮 FR:右前轮 RR:右后轮
2)操作步骤:
1、连接诊断仪
2、打开点火钥匙。
3、确认方向盘打在中央位置(车辆摆正,车轮必须沿前进方向成直线状态。
将方向盘调整对中,参照上图)。
4、进入转角系统菜单,点击“初始标定”
1)诊断仪会自动检测传感器有无故障,是否已经标定过;如传感器有故障,则退出标定
2)如传感器未被标定过,则自动进行标定;
3)如传感器已经被标定过,则提示需要“重新标定”,这时根据诊断仪提示点击“重新标定”然后再点击“初
始标定”即可。
如果没有响应则退出标定。
5、标定是否成功,诊断仪会有提示。
6、注意事项:标定过程中不可断电。
(标定过程中设备不能断电,转角传感器也不能断电,而且诊断仪、传感器的连接也要良好。
否则会造成标定不能正确完成。
如果虚接,严重时会造成产品电气过载损坏。
)
注:
①X431诊断菜单仅作参考,实际操作中以PC诊断仪为准。
② 最主要的是在实际标定时要特别重视方向盘的对中。
如果不对中,在四轮定位时,即使数据准确也会造成错误的标定数据,这种问题可能在工厂内检测不出来,在车辆行驶过程中,会造成长期累积误差或者在方向盘打到死行程时,就可能发生超量程现象,会导致ESP灯亮问题。