电动汽车:永磁同步伺服电机选型手册-丹佛斯
- 格式:pdf
- 大小:2.46 MB
- 文档页数:12
伺服系统各部分的选型顺序和选型方法
伺服系统的选型顺序和选型方法可以按照以下步骤进行:
1. 确定应用需求:首先需要确定伺服系统的应用需求,包括所需控制的运动类型(如位置、速度、力等)、所需的精度和稳定性要求、负载特性等。
2. 选择适当的伺服驱动器:根据应用需求选择适当的伺服驱动器。
考虑到驱动器的功率、电压和电流要求,以及通信接口和网络支持。
3. 确定适当的伺服电机:根据应用需求选择适当的伺服电机。
考虑到电机的功率、转速范围、转矩输出、尺寸和重量等因素。
4. 选择合适的编码器:根据应用需求选择合适的编码器类型。
常见的编码器类型包括绝对值编码器和增量编码器,根据精度和分辨率要求进行选择。
5. 确定适当的机械传动系统:根据应用需求选择适当的机械传动系统。
考虑到传动比、效率、刚度和反向间隙等因素,选择合适的传动方式,如齿轮传动、皮带传动或直线滚动轴承。
6. 其他选型考虑因素:根据具体应用需求,还可以考虑其他因素,如环境要求、防护等级、温度和振动要求等。
在选型过程中,可以进行性能比较和实际测试,以确保所选的各部分能够满足应用需求。
此外,还可以参考厂商提供的技术
手册、产品规格和应用案例,以及与供应商的交流和咨询,获取更多的信息和建议。

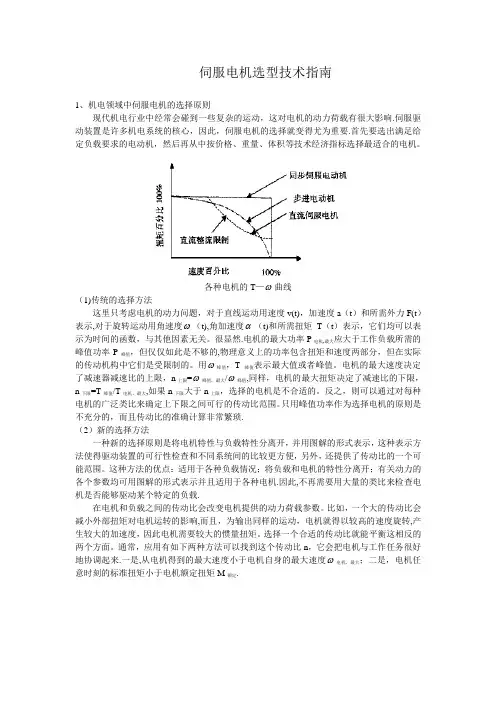
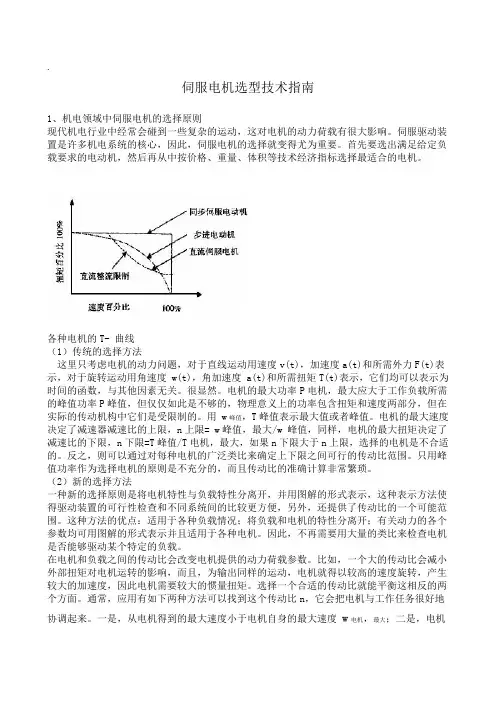
伺服电机选型技术指南1、机电领域中伺服电机的选择原则现代机电行业中经常会碰到一些复杂的运动,这对电机的动力荷载有很大影响.伺服驱动装置是许多机电系统的核心,因此,伺服电机的选择就变得尤为重要.首先要选出满足给定负载要求的电动机,然后再从中按价格、重量、体积等技术经济指标选择最适合的电机。
各种电机的T—ω曲线(1)传统的选择方法这里只考虑电机的动力问题,对于直线运动用速度v(t),加速度a(t)和所需外力F(t)表示,对于旋转运动用角速度ω(t),角加速度α(t)和所需扭矩T(t)表示,它们均可以表示为时间的函数,与其他因素无关。
很显然.电机的最大功率P电机,最大应大于工作负载所需的峰值功率P峰值,但仅仅如此是不够的,物理意义上的功率包含扭矩和速度两部分,但在实际的传动机构中它们是受限制的。
用ω峰值,T峰值表示最大值或者峰值。
电机的最大速度决定了减速器减速比的上限,n上限=ω峰值,最大/ω峰值,同样,电机的最大扭矩决定了减速比的下限,n下限=T峰值/T电机,最大,如果n下限大于n上限,选择的电机是不合适的。
反之,则可以通过对每种电机的广泛类比来确定上下限之间可行的传动比范围。
只用峰值功率作为选择电机的原则是不充分的,而且传动比的准确计算非常繁琐.(2)新的选择方法一种新的选择原则是将电机特性与负载特性分离开,并用图解的形式表示,这种表示方法使得驱动装置的可行性检查和不同系统间的比较更方便,另外,还提供了传动比的一个可能范围。
这种方法的优点:适用于各种负载情况;将负载和电机的特性分离开;有关动力的各个参数均可用图解的形式表示并且适用于各种电机.因此,不再需要用大量的类比来检查电机是否能够驱动某个特定的负载.在电机和负载之间的传动比会改变电机提供的动力荷载参数。
比如,一个大的传动比会减小外部扭矩对电机运转的影响,而且,为输出同样的运动,电机就得以较高的速度旋转,产生较大的加速度,因此电机需要较大的惯量扭矩。

.伺服电机选型技术指南1、机电领域中伺服电机的选择原则现代机电行业中经常会碰到一些复杂的运动,这对电机的动力荷载有很大影响。
伺服驱动装置是许多机电系统的核心,因此,伺服电机的选择就变得尤为重要。
首先要选出满足给定负载要求的电动机,然后再从中按价格、重量、体积等技术经济指标选择最适合的电机。
各种电机的T- 曲线(1)传统的选择方法这里只考虑电机的动力问题,对于直线运动用速度v(t),加速度a(t)和所需外力F(t)表示,对于旋转运动用角速度 w(t),角加速度 a(t)和所需扭矩T(t)表示,它们均可以表示为时间的函数,与其他因素无关。
很显然。
电机的最大功率P电机,最大应大于工作负载所需的峰值功率P峰值,但仅仅如此是不够的,物理意义上的功率包含扭矩和速度两部分,但在实际的传动机构中它们是受限制的。
用 w峰值,T峰值表示最大值或者峰值。
电机的最大速度决定了减速器减速比的上限,n上限= w峰值,最大/w 峰值,同样,电机的最大扭矩决定了减速比的下限,n下限=T峰值/T电机,最大,如果n下限大于n上限,选择的电机是不合适的。
反之,则可以通过对每种电机的广泛类比来确定上下限之间可行的传动比范围。
只用峰值功率作为选择电机的原则是不充分的,而且传动比的准确计算非常繁琐。
(2)新的选择方法一种新的选择原则是将电机特性与负载特性分离开,并用图解的形式表示,这种表示方法使得驱动装置的可行性检查和不同系统间的比较更方便,另外,还提供了传动比的一个可能范围。
这种方法的优点:适用于各种负载情况;将负载和电机的特性分离开;有关动力的各个参数均可用图解的形式表示并且适用于各种电机。
因此,不再需要用大量的类比来检查电机是否能够驱动某个特定的负载。
在电机和负载之间的传动比会改变电机提供的动力荷载参数。
比如,一个大的传动比会减小外部扭矩对电机运转的影响,而且,为输出同样的运动,电机就得以较高的速度旋转,产生较大的加速度,因此电机需要较大的惯量扭矩。
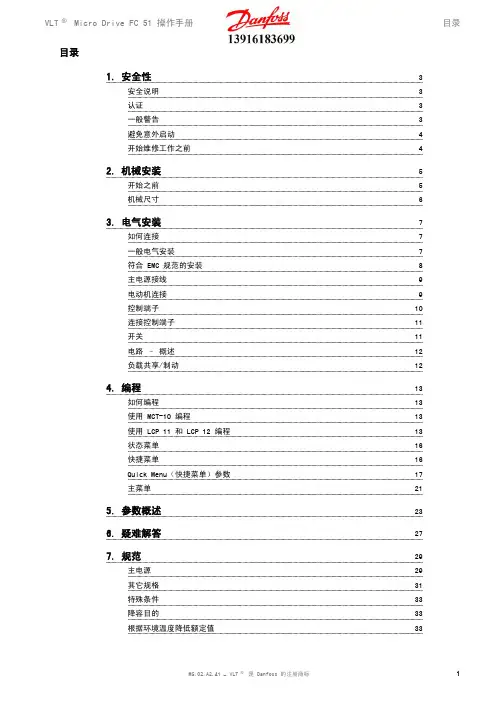
目录1. 安全性3安全说明3认证3一般警告3避免意外启动4开始维修工作之前42. 机械安装5开始之前5机械尺寸63. 电气安装7如何连接7一般电气安装7符合 EMC 规范的安装8主电源接线9电动机连接9控制端子10连接控制端子11开关11电路 – 概述12负载共享/制动124. 编程13如何编程13使用 MCT-10 编程13使用 LCP 11 和 LCP 12 编程13状态菜单16快捷菜单16Quick Menu(快捷菜单)参数17主菜单215. 参数概述236. 疑难解答277. 规范29主电源29其它规格31特殊条件33降容目的33根据环境温度降低额定值33在低气压时降容33低速运行时降容33 VLT Micro Drive FC 51 的选件34索引351.安全性1.1.1.高压警告连接到主电源时,变频器带有危险电压。
如果电动机或变频器安装不当,可能导致设备损坏甚至人身伤亡。
因此,必须遵守本手册的说明以及国家和地方的规章和安全规定。
1.1.2.安全说明•确保变频器已正确接地。
•当变频器同电源相连时,请勿拔掉主电源插头、电动机插头或其它电源插头。
•防止用户接触供电电压。
•按照国家和地方法规进行电动机过载保护。
•接地漏电电流大于 3.5 mA。
•[OFF](停止)键不是安全开关。
它不能将变频器与主电源断开。
1.1.3.认证1.1.4.一般警告警告:即使设备已断开与主电源的连接,触碰电气部件也可能会导致生命危险。
此外还应确保其它电压输入也已经断开(直流中间电路的连接)。
请注意,即使 LED 熄灭,直流回路上也可能存在高压。
在接触 VLT Micro Drive 的任何可能带电部分之前,对于所有规格,请等待至少 4 分钟的时间。
仅当特定设备的铭牌上规定了更短的等待时间,才允许更短的时间。
漏电电流VLT Micro Drive FC 51 的接地漏电电流超过 3.5 mA。
根据 IEC 61800-5-1 的要求,必须借助下述方式来增强保护性接地:横截面积最小为 10mm• 的铜芯,或额外的 PE 线 - 其横截面积应与主电源电缆相同 - 必须单独终接。

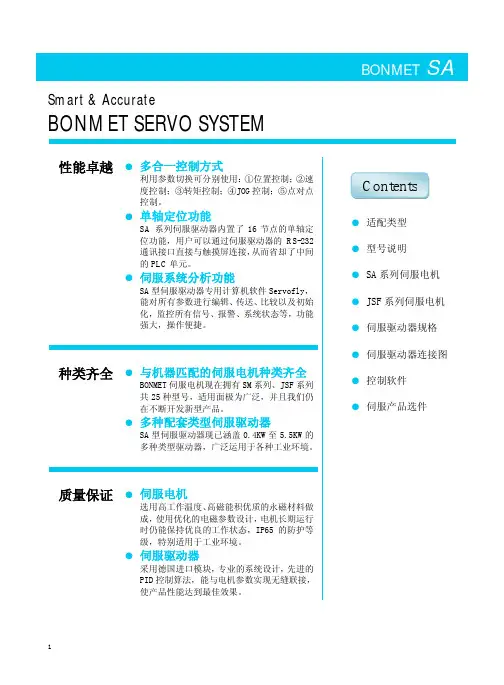
BONMET SA Smart & AccurateBONMET SERVO SYSTEM性能卓越●多合一控制方式利用参数切换可分别使用:①位置控制;②速度控制;③转矩控制;④JOG控制;⑤点对点控制。
●单轴定位功能SA系列伺服驱动器内置了16节点的单轴定位功能,用户可以通过伺服驱动器的RS-232通讯接口直接与触摸屏连接,从而省却了中间的PLC单元。
●伺服系统分析功能SA型伺服驱动器专用计算机软件Servofly,能对所有参数进行编辑、传送、比较以及初始化,监控所有信号、报警、系统状态等,功能强大,操作便捷。
种类齐全●与机器匹配的伺服电机种类齐全BONMET伺服电机现在拥有SM系列、JSF系列共25种型号,适用面极为广泛,并且我们仍在不断开发新型产品。
●多种配套类型伺服驱动器SA型伺服驱动器现已涵盖0.4KW至5.5KW的多种类型驱动器,广泛运用于各种工业环境。
质量保证●伺服电机选用高工作温度、高磁能积优质的永磁材料做成,使用优化的电磁参数设计,电机长期运行时仍能保持优良的工作状态,IP65的防护等级,特别适用于工业环境。
●伺服驱动器采用德国进口模块,专业的系统设计,先进的PID控制算法,能与电机参数实现无缝联接,使产品性能达到最佳效果。
●适配类型●型号说明●SA系列伺服电机●JSF系列伺服电机●伺服驱动器规格●伺服驱动器连接图●控制软件●伺服产品选件Contents●SM系列伺服电机型号说明SM 110 050 30 L F B Z1 2 3 4 5 6 7 81:表示电机是正弦波驱动的永磁同步交流伺服电机。
2:表示电机外径,单位:mm。
3:表示电机零速转矩,其值为三位数×0.1,单位:Nm。
4:表示电机额定转速,其值为二位数×100,单位:rpm。
5:表示电机适配的驱动器工作电压,L—AC220V,H—AC380V。
6:表示反馈元件的规格,F—复合式增量编码器(2500 C/T);F1—省线式增量编码器;R—1对极旋转变压器。
伺服电机选型的原则和注意事项为了满足机械设备对高精度、快速响应的要求,伺服电机应有较小的转动惯量和大的堵转转矩,并具有尽可能小的时间常数和启动电压,还应具有较长时间的过载能力,以满足低速大转矩的要求,能够承受频繁启动、制动和正、反转,如果盲目地选择大规格的电机,不仅增加成本,也会使得设计设备的体积增大,结构不紧凑,因此选择电机时应充分考虑各方面的要求,以便充分发挥伺服电机的工作性能;下面介绍伺服电机的选型原则和注意事项。
选用伺服电机型号的步骤1、明确负载机构的运动条件要求,即加/减速的快慢、运动速度、机构的重量、机构的运动方式等。
2、依据运行条件要求选用合适的负载惯最计算公式,计算出机构的负载惯量。
3、依据负载惯量与电机惯量选出适当的假选定电机规格。
4、结合初选的电机惯量与负载惯量,计算出加速转矩及减速转矩。
5、依据负载重量、配置方式、摩擦系数、运行效率计算出负载转矩。
6、初选电机的最大输出转矩必须大于加速转矩加负载转矩;如果不符合条件,必须选用其他型号计算验证直至符合要求。
7、依据负载转矩、加速转矩、减速转矩及保持转矩,计算出连续瞬时转矩。
8、初选电机的额定转矩必须大于连续瞬时转矩,如果不符合条件,必须选用其他型号计算验证直至符合要求。
9、完成选定。
伺服电机的选型计算方法1、转速和编码器分辨率的确认。
2、电机轴上负载力矩的折算和加减速力矩的计算。
3、计算负载惯量,惯量的匹配,安川伺服电机为例,部分产品惯量匹配可达50倍,但实际越小越好,这样对精度和响应速度好。
4、再生电阻的计算和选择,对于伺服,一般2kw以上,要外配置。
5、电缆选择,编码器电缆双绞屏蔽的,对于安川伺服等日系产品绝对值编码器是6芯,增量式是4芯。
以上的选择方法只考虑到电机的动力问题,对于直线运动用速度,加速度和所需外力表示,对于旋转运动用角速度,角加速度和所需扭矩表示,它们均可以表示为时间的函数,与其他因素无关。
很显然。
电机的最大功率P电机,最大应大于工作负载所需的峰值功率P峰值,但仅仅如此是不够的,物理意义上的功率包含扭矩和速度两部分,但在实际的传动机构中它们是受限制的。
伺服电机减速机选型手册伺服电机减速机选型手册第一章:简介1.1 本手册目的本手册旨在为用户提供准确、全面的伺服电机减速机选型指南,帮助用户根据具体需求选择适合的产品。
1.2 产品概述伺服电机减速机是一种将伺服电机与减速机相结合的装置,通过减速机将电机输出的转速降低,从而提高扭矩和力矩输出。
1.3 产品优势伺服电机减速机具有以下优势:- 高精度:可实现精确的位置和速度控制。
- 高效率:通过减少能量损失,提高能源利用效率。
- 高可靠性:采用优质材料和先进工艺,确保长时间稳定运行。
- 多种配置:提供多种规格和型号,适应不同应用场景。
第二章:选型指南2.1 选型前准备在选型前,请用户明确以下信息:- 载荷特性:包括负载类型、负载惯性、载荷的最大和最小工作范围等。
- 工作环境:环境温度、湿度、振动等对设备的影响。
- 控制要求:需要实现的精度、速度范围等要求。
2.2 选型步骤根据上述信息,用户可以按照以下步骤选择合适的伺服电机减速机:1. 确定负载特性,计算所需扭矩和力矩。
2. 根据负载特性选择适当的减速比。
3. 根据所需精度和速度范围选择合适的伺服电机。
4. 结合所选减速比和伺服电机,选择适合的伺服电机减速机型号。
第三章:产品型录在本章节中,我们提供了各种型号的伺服电机减速机的详细参数和性能指标表。
用户可以根据需求查找适合的产品,并与销售代表联系以获得更多信息。
第四章:应用示例本章节列举了一些常见的应用示例,展示了伺服电机减速机在不同领域的应用场景和性能表现。
第五章:选型建议根据用户需求的不同,本章节提供了一些建议的伺服电机减速机型号和配置,以供用户参考和选择。
第六章:常见问题解答在本章节中,我们回答了一些用户常见的问题,帮助用户更好地理解和选择伺服电机减速机。
第七章:联系我们如需更多信息或有任何疑问,请联系我们的销售代表。