DS步进电机驱动电路
- 格式:doc
- 大小:749.50 KB
- 文档页数:11
一份步进电机驱动器整机电路图(原创)在由上位机或PLC为主的工控系统中,尤其是在对各种机械设备的控制中,常常看到PLC、触摸屏、伺服电机驱动器、伺服电机或步进电机驱动器、步进电机的组合应用。
对于伺服电机和步进电机,由于结构简单,原理上也不是太复杂,看到实物,再配合应用,就了解了。
但对电机驱动器的结构和电路,限于各种条件,就难以知道其“本来面目”了。
本人由于工作关系,接手了一台需维修的步进电机驱动器,又由于维修的需要,测绘了步进电机的整机电路图,浏览之下,就知道步进电机驱动器是个怎么回事了。
在此将整机全图奉献于大家。
整机全图共4张。
第一张图:步进电机驱动的主电路和开关电源电路。
步进电机驱动器的功率输出电路的形式同变频器主电路是相似的。
每一路皆由两只IGBT管子做推挽式输出,在管子上也反向并联了二极管,以提供反向电流的通路,进而保护IGBT管子的安全。
IGBT 管子的过流保护信号由AR1、BR1两只电阻上取得,此两只电阻将流经IGBT管子的电流信号转化为电压信号,经后级保护电路处理,送入单片机。
开关电源输出的+5V,作为单片机的电源。
另外,+5V、-5V还作为保护电路的双电路供电。
一路+15V电源,经PIC和PT1转化为四路15V电源,供四路驱动电路用。
第二张图:驱动电源及端子信号来源。
由电源板来的+15V电源,经NE555时基电路振荡逆变,开关变压器PT1四个次级绕组输出四组互相隔离的15V直流电压,供驱动IC的供电;第三张图:步进电机驱动器的脉冲驱动电路及步时电机的工作电流设定电路等。
驱动IC采用IS2110S专用的驱动芯片,单片机输出的四路脉冲信号经由74LS08四二输入与门电路处理后,送入四片IS2110S驱动电路,经光电隔离和功率放大后,送放逆变功率电路,输入步进脉冲到步时电机;第四张图:CPU(单片机)电路和控制端子内电路图。
步进电机驱动器是由单片机生成四路脉冲信号,经后续电路驱动功率输出电路,进而驱动步进电机的。

步进电机工作原理及驱动器电路设计(含源程序)步进电机工作原理及驱动器设计步进电机在控制系统中具有广泛的应用。
它可以把脉冲信号转换成角位移,并且可用作电磁制动轮、电磁差分器、或角位移发生器等。
有时从一些旧设备上拆下的步进电机(这种电机一般没有损坏)要改作它用,一般需自己设计驱动器。
本文介绍的就是为从一日本产旧式打印机上拆下的步进电机而设计的驱动器。
本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。
1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:a. 单四拍b. 双四拍 c八拍图2.步进电机工作时序波形图2.基于AT89C2051的步进电机驱动器系统电路原理步进电机驱动器系统电路原理如图3:图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
实用的步进电机驱动电路(图)概述步进电机是一种将电脉冲转化为角位移的执行机构,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
目前,对步进电机的控制主要有由分散器件组成的环形脉冲分配器、软件环形脉冲分配器、专用集成芯片环形脉冲分配器等。
本设计选用第三种方案,用PMM8713三相或四相步进电机的脉冲分配器、SI-7300A 两相或四相功率驱动器,组成四相步进电机功率驱动电路,以提高集成度和可靠性,步进电机控制框图见图1。
图1 步进电机控制系统框图硬件简介● PMM8713原理框图及功能PMM8713是日本三洋电机公司生产的步进电机脉冲分配器,适用于控制三相或四相步进电机。
控制三相或四相步进电机时都可以选择3种励磁方式,每相最小吸入与拉出电流为20mA,它不仅满足后级功率放大器的输入要求,而且在其所有输入端上均内嵌施密特触发电路,抗干扰能力强,其原理框图如图2所示。
图2 PMM8713的原理框图在PMM8713的内部电路中,时钟选通部分用于设定步进电机的正反转脉冲输入发。
PMM8713有两种脉冲输入法:双脉冲输入法和单脉冲输入法。
采用双脉冲输入法时,CP、CU两端分别输入步进电机正反转的控制脉冲。
当采用单脉冲输入时,步进电机的正反转方向由U/D的高、低电位决定。
激励方式控制电路用来选择采用何种励磁方式。
激励方式判断电路用于输出检测;而可逆环形计数器则用于产生步进电机在选定的励磁方式下的各相通断时序信号。
● SI-7300A的结构及功率驱动原理SI-7300A是日本三青公司生产的高性能步进电机集成功率放大器,该器件为单极性四相驱动,采用SIP18封装。
步进电机功率驱动级电路可分为电压和电流两种驱动方式。
电流驱动方式最常用的是PWM恒流斩波驱动电路,也是最常用的高性能驱动方式,其中一相的等效电路图如图3所示。
图3 LM331电压/频率变换电路● LM331芯片LM331是美国国家半导体公司生产的双列直插式8脚芯片,只需接入几个外部元件就可以方便地构成电压/频率(V/F)变换电路,电路如图4所示。
步进电机驱动器整机电路图教程来源:中华工控网作者:未知点击:5893次时间:2009-8-27 11:34:12在由上位机或PLC为主的工控系统中,尤其是在对各种机械设备的控制中,常常看到PLC、触摸屏、伺服电机驱动器、伺服电机或步进电机驱动器、步进电机的组合应用。
对于伺服电机和步进电机,由于结构简单,原理上也不是太复杂,看到实物,再配合应用,就了解了。
但对电机驱动器的结构和电路,限于各种条件,就难以知道其“本来面目”了。
本人由于工作关系,接手了一台需维修的步进电机驱动器,又由于维修的需要,测绘了步进电机的整机电路图,浏览之下,就知道步进电机驱动器是个怎么回事了。
在此将整机全图奉献于大家。
整机全图共4张。
第一张图:步进电机驱动的主电路和开关电源电路。
步进电机驱动器的功率输出电路的形式同变频器主电路是相似的。
每一路皆由两只IGBT管子做推挽式输出,在管子上也反向并联了二极管,以提供反向电流的通路,进而保护IGBT管子的安全。
IGBT管子的过流保护信号由AR1、BR1两只电阻上取得,此两只电阻将流经IGBT管子的电流信号转化为电压信号,经后级保护电路处理,送入单片机。
开关电源输出的+5V,作为单片机的电源。
另外,+5V、-5V 还作为保护电路的双电路供电。
一路+15V电源,经PIC和PT1转化为四路15V电源,供四路驱动电路用。
第二张图:驱动电源及端子信号来源。
由电源板来的+15V电源,经NE555时基电路振荡逆变,开关变压器PT1四个次级绕组输出四组互相隔离的15V直流电压,供驱动IC的供电;第三张图:步进电机驱动器的脉冲驱动电路及步时电机的工作电流设定电路等。
驱动IC采用IS2110S专用的驱动芯片,单片机输出的四路脉冲信号经由74LS08四二输入与门电路处理后,送入四片IS2110S驱动电路,经光电隔离和功率放大后,送放逆变功率电路,输入步进脉冲到步时电机;第四张图:CPU(单片机)电路和控制端子内电路图。
数字电路课程设计任务书
自动化、电气工程专业
一、设计课题 步进电机驱动电路
二、设计目的
1、掌握计数器的设计和调试方法;
2、掌握相关集成电路的工作原理及使用方法;
3、利用所学知识初步掌握解决实际问题的能力。
三、设计内容及要求
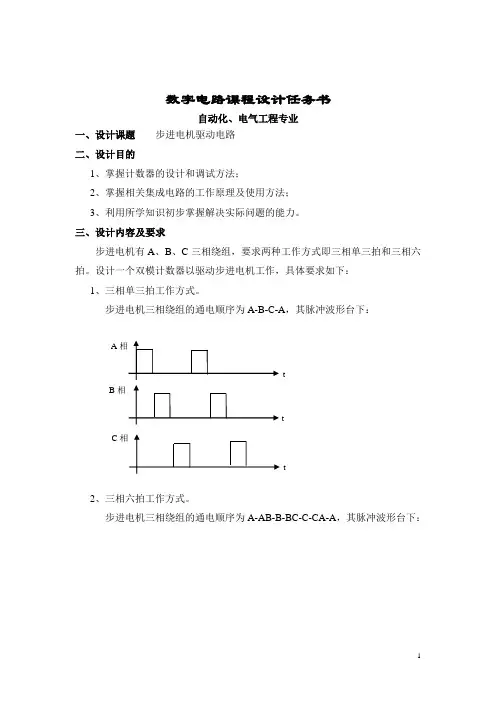
步进电机有A 、B 、C 三相绕组,要求两种工作方式即三相单三拍和三相六拍。
设计一个双模计数器以驱动步进电机工作,具体要求如下:
1、三相单三拍工作方式。
步进电机三相绕组的通电顺序为A-B-C-A ,其脉冲波形台下:
2、三相六拍工作方式。
步进电机三相绕组的通电顺序为A-AB-B-BC-C-CA-A ,其脉冲波形台下:
A B 相C t
t
t
3、集成电路必须选型,如果所选集成电路输出电平不兼容(即集成电路类型
不同),还必须设计接口电路。
4、画出计数器的原理图以及各集成电路的外引脚图。
5、不考虑计数器的驱动能力。
6、写出设计说明书。
7、也可选择其它课题。
四、设计时间 第10周
五、参考书目
[1]、《数字电路》阎石主编. 高等教育出版社 第四版 1999。
[2]、《集成电路手册》
[3]、《新标准电气识图》王晋生、杨元峰主编。
t
t
t
A B C。
步进电机驱动电路讲解打印机的字车电机、走纸电机、头间隙控制电机大多采用步进电机。
步进电机具有控制精度高,控制方便的特点。
只要通过控制步进电机转动的步数,就可以控制步进电机的转动角度实现对纸张移动、字车移动定位、打印头间隙的精确控制。
步进电机的驱动主要有以下三点:1)由cpu产生4相控制信号,这4个相位控制信号的相位顺序不同,将控制电机正向或反向转动。
输出相位信号脉冲的个数来控制步进电机转动的角度。
2)通过控制电机驱动电流的大小来控制转动力矩。
3)在打印间隙步进电机不转的时候需要一个比较小的电流来使电机产生一个静力矩。
来保证字车,纸张的位置精度不被破坏。
以上三条是要控制步进电机的必须具备的条件。
其中第一项式打印机cpu通过程序运算来实现的,并且4个相位的控制信号也是从cup输出的。
在电路图中只能看到有4条信号线从cup或者门阵输出到驱动电路,在这里我们就不做进一步的讨论了。
我们在这里讲解的步进电机驱动电路将只解决后两项要求的问题,这是我们的重点和核心。
(如何控制电机的工作电流包括:开启、稳定调整电流、锁定电流)根据实现方法不同步进电机驱动电路主要分下列常见的是3种电路形式,这三种电路形式在不同型号的打印机里有被用于字车电机的驱动电路,也有被用于走纸电机的驱动电路。
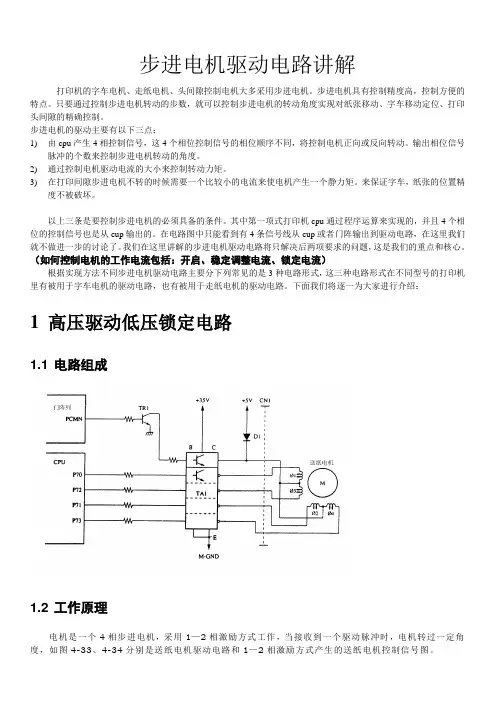
下面我们将逐一为大家进行介绍:1高压驱动低压锁定电路1.1 电路组成1.2 工作原理电机是一个4相步进电机,采用1—2相激励方式工作,当接收到一个驱动脉冲时,电机转过一定角度,如图4-33、4-34分别是送纸电机驱动电路和1—2相激励方式产生的送纸电机控制信号图。
送纸电机电压使用情况如下:通过设置门阵列的PCMN口为高或低电平,及三极管TR1和三极管阵列TA1的导通与截止,输入送纸电机的电压可被改变。
当TA1被打开,+35V电压供给送纸电机,电机被驱动,进行送纸;当TA1被断开,+5V电压经二极管D1供给送纸电机,给送纸电机一个偏压,该偏压使步进电机产生静转矩阻止轴摆动,使字车锁定在该位置,以保证送纸精度,这就是所谓的“高压驱动、低压锁定”的驱动原理。
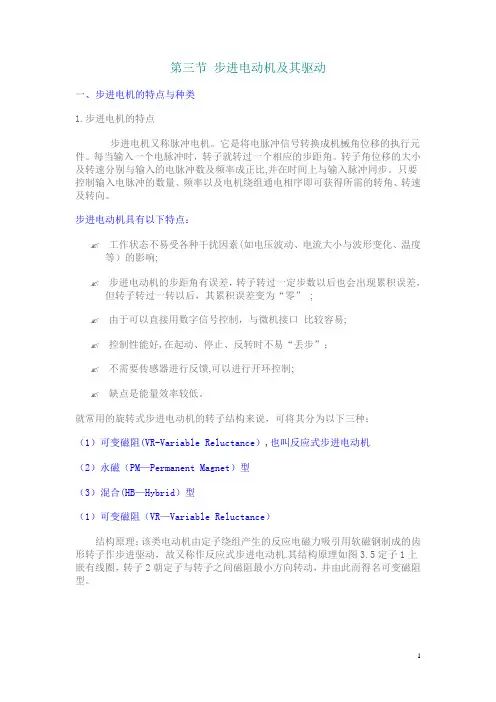
第三节步进电动机及其驱动一、步进电机的特点与种类1.步进电机的特点步进电机又称脉冲电机。
它是将电脉冲信号转换成机械角位移的执行元件。
每当输入一个电脉冲时,转子就转过一个相应的步距角。
转子角位移的大小及转速分别与输入的电脉冲数及频率成正比,并在时间上与输入脉冲同步。
只要控制输入电脉冲的数量、频率以及电机绕组通电相序即可获得所需的转角、转速及转向。
步进电动机具有以下特点:✍工作状态不易受各种干扰因素(如电压波动、电流大小与波形变化、温度等)的影响;✍步进电动机的步距角有误差,转子转过一定步数以后也会出现累积误差,但转子转过一转以后,其累积误差变为“零” ;✍由于可以直接用数字信号控制,与微机接口比较容易;✍控制性能好,在起动、停止、反转时不易“丢步”;✍不需要传感器进行反馈,可以进行开环控制;✍缺点是能量效率较低。
就常用的旋转式步进电动机的转子结构来说,可将其分为以下三种:(1)可变磁阻(VR-Variable Reluctance),也叫反应式步进电动机(2)永磁(PM—Permanent Magnet)型(3)混合(HB—Hybrid)型(1)可变磁阻(VR—Variable Reluctance)结构原理:该类电动机由定子绕组产生的反应电磁力吸引用软磁钢制成的齿形转子作步进驱动,故又称作反应式步进电动机.其结构原理如图3.5定子1上嵌有线圈,转子2朝定子与转子之间磁阻最小方向转动,并由此而得名可变磁阻型。
图3。
6 可变式阻步进电机可变磁阻步进电机的特点:❖反应式电动机的定子与转子均不含永久磁铁,故无励磁时没有保持力;❖需要将气隙作得尽可能小,例如几个微米;❖结构简单,运行频率高,可产生中等转矩,步距角小(0。
09~9°)❖制造材料费用低;❖有些数控机床及工业机器人上使用。
(3)混合(HB—Hybrid)型结构原理这类电机是PM式和VR式的复合形式。
其定子与VR类似,表面制有小齿,转子由永磁铁和铁心构成,同样切有小齿,为了减小步距角可以在结构上增加转子和定子的齿数。

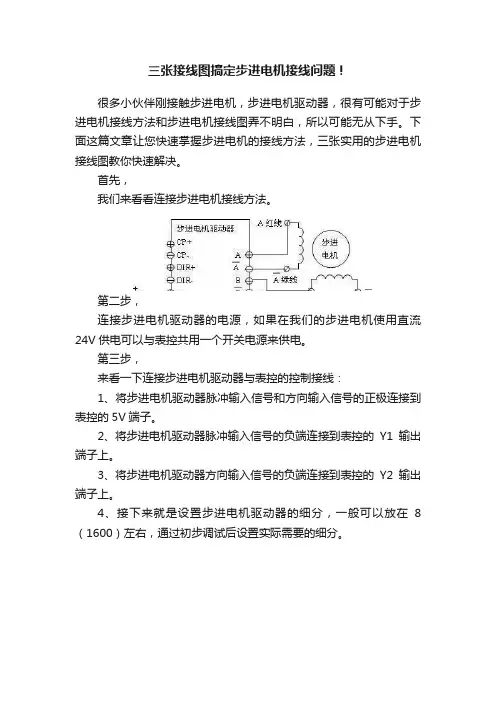
三张接线图搞定步进电机接线问题!很多小伙伴刚接触步进电机,步进电机驱动器,很有可能对于步进电机接线方法和步进电机接线图弄不明白,所以可能无从下手。
下面这篇文章让您快速掌握步进电机的接线方法,三张实用的步进电机接线图教你快速解决。
首先,我们来看看连接步进电机接线方法。
第二步,连接步进电机驱动器的电源,如果在我们的步进电机使用直流24V供电可以与表控共用一个开关电源来供电。
第三步,来看一下连接步进电机驱动器与表控的控制接线:1、将步进电机驱动器脉冲输入信号和方向输入信号的正极连接到表控的5V端子。
2、将步进电机驱动器脉冲输入信号的负端连接到表控的Y1输出端子上。
3、将步进电机驱动器方向输入信号的负端连接到表控的Y2输出端子上。
4、接下来就是设置步进电机驱动器的细分,一般可以放在8(1600)左右,通过初步调试后设置实际需要的细分。
5、设置步进电机的正转设置,参考设置,一行实现正转。
X1是正转的启动开关。
6、步进电机反转的设置:X2是反向启动开关,Y1输出脉冲,Y2输出方向信号。
两行实现反转动作。
好了,小编描述了步进电机接线和最基本的设置方法就到这里告一段落了,一般情况保证接线正确,但是要特别注意的是电源的极性,设置正确就可以正常运行。
看到这里,相信很多小伙伴对此已经非常熟悉了。
步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。
每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。
步进电机通常被用作定位控制和定速控制。
下面为大家分享三张最实用的步进电机接线图!二相混合式步进电机+三相混合式步进电机+五相混合式步进电机接线图空心杯无刷电机接线图工业级无刷电机接线图看完以上关于步进电机接线的知识和问题,是不是轻松就搞定了呢?!来源:网络。
步进驱动器原理图参考资料:/s/blog_71facf000100pyy3.html在由上位机或PLC为主的工控系统中,尤其是在对各种机械设备的控制中,常常看到PLC、触摸屏、伺服电机驱动器、伺服电机或步进电机驱动器、步进电机的组合应用。
对于伺服电机和步进电机,由于结构简单,原理上也不是太复杂,看到实物,再配合应用,就了解了。
但对电机驱动器的结构和电路,限于各种条件,就难以知道其“本来面目”了。
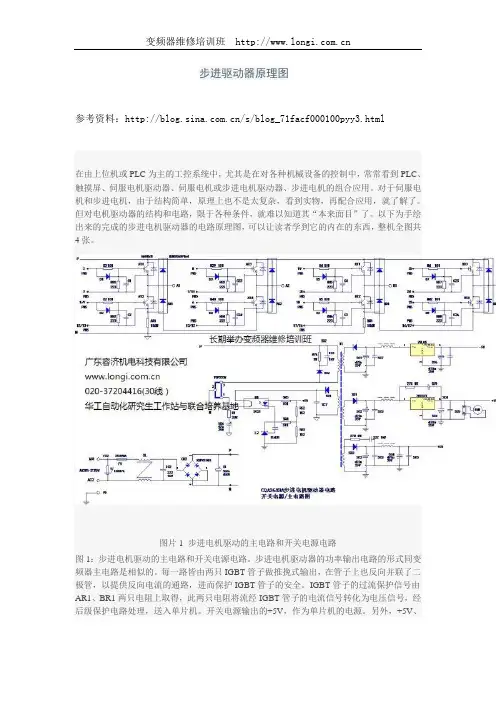
以下为手绘出来的完成的步进电机驱动器的电路原理图,可以让读者学到它的内在的东西,整机全图共4张。
图片1 步进电机驱动的主电路和开关电源电路图1:步进电机驱动的主电路和开关电源电路。
步进电机驱动器的功率输出电路的形式同变频器主电路是相似的。
每一路皆由两只IGBT管子做推挽式输出,在管子上也反向并联了二极管,以提供反向电流的通路,进而保护IGBT管子的安全。
IGBT管子的过流保护信号由AR1、BR1两只电阻上取得,此两只电阻将流经IGBT管子的电流信号转化为电压信号,经后级保护电路处理,送入单片机。
开关电源输出的+5V,作为单片机的电源。
另外,+5V、-5V还作为保护电路的双电路供电。
一路+15V电源,经PIC和PT1转化为四路15V电源,供四路驱动电路用。
图2 驱动电源及端子信号来源图2:驱动电源及端子信号来源。
由电源板来的+15V电源,经NE555时基电路振荡逆变,开关变压器PT1四个次级绕组输出四组互相隔离的15V直流电压,供驱动IC的供电;图片3 步进电机驱动器的脉冲驱动电路及步时电机的工作电流设定电路图3:步进电机驱动器的脉冲驱动电路及步时电机的工作电流设定电路等。
驱动IC采用IS2110S专用的驱动芯片,单片机输出的四路脉冲信号经由74LS08四二输入与门电路处理后,送入四片IS2110S驱动电路,经光电隔离和功率放大后,送放逆变功率电路,输入步进脉冲到步时电机;<?xml:namespace prefix = o ns = "urn:schemas-microsoft-com:office:office" />图4 CPU(单片机)电路和控制端子内电路图。
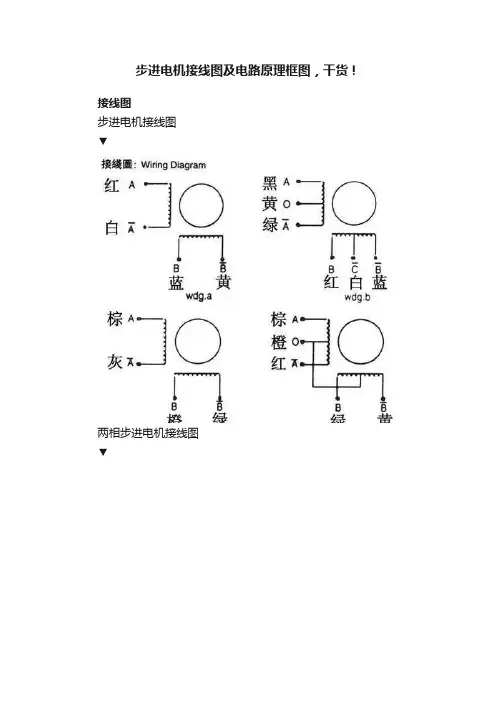
步进电机接线图及电路原理框图,干货!
接线图
步进电机接线图
▼
两相步进电机接线图
▼
两相混合式步进电机驱动器
▼
四相步进电机接线图
▼
三菱PLC与步进电机驱动器的接线图▼
伺服系统的输进信号接线图▼
控制原理图片
电机控制原理图
▼
H桥恒频斩恒相流驱动电路原理框图▼
电流PWM细分驱动电路示意图
▼
单极性驱动原理图
▼
双极性驱动原理图
▼
步进电动机微步驱动电路基本结构▼
步进电动机矢量控制位置伺服系统▼
步进电动机的闭环伺服控制系统
▼
(文章来源网络仅供参考。
评论处大家可以补充文章解释不对或欠缺的部分)。
步进电机细分驱动电路及原理(后面是已经编好的程序改改就可直接使用)步进电机细分驱动电路及原理(后面是已经编好的程序改改就可直接使用)细分原理分析步进电机驱动线路,如果按照环形分配器决定的分配方式,控制电动机各相绕组的导通或截止,从而使电动机产生步进所需的旋转磁势拖动转子步进旋转,则步距角只有二种,即整步工作或半步工作,步距角已由电机结构所确定。
如果要求步进电机有更小的步距角,更高的分辨率,或者为了电机振动、噪声等原因,可以在每次输入脉冲切换时,只改变相应绕组中额定的一部分,则电机的合成磁势也只旋转步距角的一部分,转子的每步运行也只有步距角的一部分。
这里,绕组电流不是一个方波,而是阶梯波,额定电流是台阶式的投入或切除,电流分成多少个台阶,则转子就以同样的次数转过一个步距角,这种将一个步距角细分成若干步的驱动方法,称为细分驱动。
在国外,对于步进系统,主要采用二相混合式步进电机及相应的细所示。
单片机根据要求的步距角计算出各相绕组中通过的电流值,并输出到数模转换器(DPA) 中,由DPA 把数字量转换为相应的模拟电压,经过环形分配器加到各相的功放电路上,控制功放电路给各相绕组通以相应的电流,来实现步进电机的细分。
单片机控制的步进电机细分驱动电路根据末级功放管的工作状态可分为放大型和开关型两种(见下图5)。
图5 步进电机细分驱动电路放大型步进电机细分驱动电路中末级功放管的输出电流直接受单片机输出的控制电压控制,电路较简单,电流的控制精度也较高,但是由于末级功放管工作在放大状态,使功放管上的功耗较大,发热严重,容易引起晶体管的温漂,影响驱动电路的性能。
甚至还可能由于晶体管的热击穿,使电路不能正常工作。
因此该驱动电路一般应用于驱动电流较小、控制精度较高、散热情况较好的场合。
开关型步进电机细分驱动电路中的末级功放管工作在开关状态,从而使得晶体管上的功耗大大降低,克服了放大型细分电路中晶体管发热严重的问题。
但电路较复杂,输出的电流有一定的波纹。
制作天地HANDS ON PROJECTS作者谢彪步进电机原理及简易驱动电路的制作步进电机是机电一体化的关键部件之一,是一种高精度的执行元件,它能将脉冲信号转变成角位移,即给一个脉冲,步进电机就转过一个角度,因此控制精度高,广泛地应用于各种自动化控制系统和机器人领域中,目前步进电机的控制器主要是通过单片机及专用集成芯片构成的,这样成本高、结构复杂、开发周期长。
广大的电子爱好者,尤其是一些初学者很难具备相应的条件,为此笔者设计并制作了一款成本低廉、性能稳定、控制简单、制作方便的步进电机控制器,供大家参考。
一、步进电机工作原理目前比较常用的步进电机主要有反应式(VR)、永磁式(PM)、混合式(HB)三种类型,这几种电机虽然在组成结构上有所差别,但总体的工作原理还是类似的,下面就以比较典型的反应式步进电机为例简述其工作原理:1.步进电机的结构组成步进电机可以分成转子和定子两部分。
以图太长,有条件的话,电烙铁最好外壳接地,焊音乐片时可先将音乐片的第一个脚进行上锡,注意不要太多,否则无法插入线路板上的小槽,音乐片与线路板焊接线,线路板上应全部上过锡,当插入音乐片后,先将第一只脚与线路板进行焊接,让其定位,然后再将最后一只脚焊上,等焊锡冷后,音乐片便牢牢地装在线路板上了,这时再去焊另外的引脚就会方便许多。
制作完成的接收线路板与电源及喇叭的接线如图6 所示。
图6三、系统调试1.发射器的调试:所有元件安装好后,将电路板装入遥控器盒子内,注意检查微动开关是否可听到清晰的开关声。
2.如有频率计或频谱仪等仪器,可在装入发射器电池后按动遥控器检测是否有高频无线电波发射,如没有这些仪器,也可用收音机或接上电脑音响,当按动遥控器时,可听到“吱、吱”声,这就表明发射部分工作正常,一般只要元件安装正确,元件焊接时线路板上无搭锡或虚焊,都能一次成功。
3.接收器的调试:全部元件安装完成后,将线路板装入塑料外壳内,电源引线连接时一定要注意极性不要装反。
步进驱动器控制电机抱闸驱动电路的制作方法步进驱动器是一种常用于控制步进电机的装置,其可以控制电机按照一定的步进角度旋转。
而电机抱闸驱动电路则是用来控制电机抱闸的装置,它可以通过控制电机的转动方向和速度来实现对抱闸的控制。
本文将介绍一种制作步进驱动器控制电机抱闸驱动电路的方法,以下是步骤:1.准备材料和工具制作步进驱动器控制电机抱闸驱动电路所需的材料包括:步进驱动器模块、电机抱闸模块、电源适配器、连接线等。
还需要使用螺丝刀、钳子、压线钳等工具。
2.连接电源适配器和电机抱闸模块首先,将电源适配器的正负极分别与电机抱闸模块的正负极连接,这样可以为电机提供稳定的电源。
3.连接步进驱动器模块和电机抱闸模块将步进驱动器模块的脉冲、方向和使能信号引脚分别与电机抱闸模块的对应信号输入引脚连接。
通常,脉冲信号用来控制步进电机的转动角度,方向信号用来指示电机的转动方向,使能信号用来启用或禁用电机抱闸。
4.连接电机抱闸和步进驱动器模块将电机抱闸的相线分别与步进驱动器模块的对应输出引脚连接。
根据电机抱闸模块的连接方式和步进驱动器模块的输出方式,正确地连接电机抱闸和步进驱动器。
5.连接电源适配器和步进驱动器模块将电源适配器的正负极分别与步进驱动器模块的正负极连接,这样可以为步进驱动器提供稳定的电源。
6.调试和测试完成连接后,进行电路的调试和测试。
可以通过发送脉冲和方向信号,以及控制使能信号的高低电平来测试电机抱闸的转动情况。
根据测试结果,调整电路或参数,直至达到满意的效果。
制作步进驱动器控制电机抱闸驱动电路需要一定的电子知识和技能,同时需要注意正确接线和安全使用电源。
在实际制作过程中,还需要根据具体的步进驱动器和电机抱闸的型号和参数进行正确的连接和设置。
这里介绍的方法只是一种示范,具体操作还需根据实际情况进行调整。
总之,只要按照正确的步骤和方法进行安装和调试,就能够制作出一个稳定可靠的步进驱动器控制电机抱闸驱动电路。
步进电机及其驱动电路原理图2012年05月21日14:20 来源:本站整理作者:秩名我要评论(6)步进电机是工业控制及仪表中最常用的控制元件之一,它有输入脉冲与电机轴转成比例的特征,在智能机器人、软盘驱动器、数据机床中广泛运用,微电脑控制步进电机最适宜系统中设计使用20BY-0型号步进电机,它实用+5V直流电源,步距角为18度,电机线圈由四相组成。
步进电机是工业控制及仪表中最常用的控制元件之一,它有输入脉冲与电机轴转成比例的特征,在智能机器人、软盘驱动器、数据机床中广泛运用,微电脑控制步进电机最适宜系统中设计使用20BY-0型号步进电机,它实用+5V直流电源,步距角为18度,电机线圈由四相组成。
如下图所示,即A、B、C、D四相。
驱动电路由脉冲信号控制,所以调节脉冲信号的频率便可以改变步进电机的转速。
途中BA、BB、BC、BD即为脉冲信号输入插孔,驱动器输出A、B、C、D接步进电机。
原理步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。
仅仅处于一种盲目的仿制阶段。
这就给户在产品选型、使用中造成许多麻烦。
鉴于上述情况,我们决定以广泛的感应子式步进电机为例。
叙述其基本工作原理。
望能对广大用户在选型、使用、及整机改进时有所帮助。
步进电机驱动电路讲解打印机的字车电机、走纸电机、头间隙控制电机大多采用步进电机。
步进电机具有控制精度高,控制方便的特点。
只要通过控制步进电机转动的步数,就可以控制步进电机的转动角度实现对纸张移动、字车移动定位、打印头间隙的精确控制。
步进电机的驱动主要有以下三点:1)由cpu产生4相控制信号,这4个相位控制信号的相位顺序不同,将控制电机正向或反向转动。
输出相位信号脉冲的个数来控制步进电机转动的角度。
2)通过控制电机驱动电流的大小来控制转动力矩。
3)在打印间隙步进电机不转的时候需要一个比较小的电流来使电机产生一个静力矩。
来保证字车,纸张的位置精度不被破坏。
以上三条是要控制步进电机的必须具备的条件。
其中第一项式打印机cpu通过程序运算来实现的,并且4个相位的控制信号也是从cup输出的。
在电路图中只能看到有4条信号线从cup或者门阵输出到驱动电路,在这里我们就不做进一步的讨论了。
我们在这里讲解的步进电机驱动电路将只解决后两项要求的问题,这是我们的重点和核心。
(如何控制电机的工作电流包括:开启、稳定调整电流、锁定电流)根据实现方法不同步进电机驱动电路主要分下列常见的是3种电路形式,这三种电路形式在不同型号的打印机里有被用于字车电机的驱动电路,也有被用于走纸电机的驱动电路。
下面我们将逐一为大家进行介绍:1高压驱动低压锁定电路1.1 电路组成1.2 工作原理电机是一个4相步进电机,采用1—2相激励方式工作,当接收到一个驱动脉冲时,电机转过一定角度,如图4-33、4-34分别是送纸电机驱动电路和1—2相激励方式产生的送纸电机控制信号图。
图4-34 送纸电机驱动信号送纸电机电压使用情况如下:状态电压作用操作+35 V 电机驱动准备+5V 保持偏压,锁定电机通过设置门阵列的PCMN口为高或低电平,及三极管TR1和三极管阵列TA1的导通与截止,输入送纸电机的电压可被改变。
当TA1被打开,+35V电压供给送纸电机,电机被驱动,进行送纸;当TA1被断开,+5V电压经二极管D1供给送纸电机,给送纸电机一个偏压,该偏压使步进电机产生静转矩阻止轴摆动,使字车锁定在该位置,以保证送纸精度,这就是所谓的“高压驱动、低压锁定”的驱动原理。
1.3 特点总结这种电路的优点是比较简单,他没有单独的电流控信号,其工作电流的控制是通过控制公共通路三极管的导通与截止实现的,缺点是如果输出功率太大时,需要使用太多的大功率元器件成本较高。
另外他的锁定电流是从5V 逻辑回路电源共给的,如果锁定电流过大的话会影响逻辑电路工作的稳定性。
以前的老型号打印机中使用的比较多,打印机中字车电机和走纸电机驱动电路使用的都是这种电路。
在新型号打印机种主要用于小功率电机(例如走纸电机、打印头间隙电机等)的控制。
1.4 应用电路介绍在DS1700打印机中,送纸电机是一个4相步进电机,采用1—2相激励方式工作,当接收到一个驱动脉冲时,电机转过一定角度,如图3-1是送纸电机驱动电路。
图3-1 走纸电机驱动电路通过设置门阵列的PFCNON口为高或低电平,及三极管DTR1、TR1和三极管阵列TRA1的导通与截止,输入送纸电机的电压可被改变。
当DTR1和TR1被打开,+35V电压供给送纸电机,电机被驱动,进行送纸;当DTR1和TR1被断开,+5V电压经二极管D1供给送纸电机,给送纸电机一个偏压,该偏压使步进电机产生静转矩阻止轴摆动,使字车锁定在该位置,以保证送纸精度,这就是所谓的“高压驱动、低压锁定”的驱动原理。
图3-2 STA-475内部电路2电流设定驱动电路2.1 电路组成图4-35 字车电机控制驱动回路(AR 5400+)2.2 工作原理由于字车电机采用设定电流工作方式,所以这个电机控制回路和上一个控制回路稍有区别,比高压驱动低压锁定控制电路复杂一些。
图4-35中的放大器IC11用作电压比较器,1Ω电阻R104用于电流检测,检测字车电机绕组中电流的大小,它将字车电机绕组中电流的大小转化为一个电压值,送到电压比较器IC11的同相输入端。
下面分析一下这个电路的工作原理:图4-36 字车电机驱动电路信号图①CPU发出一个字车电机相位控制信号CRIA并送到门阵列,门阵列接到该信号后,便从CRA脚发出一个高电平的字车驱动控制信号,该信号通过一个同相缓冲器IC8加到场效应管阵列TA8的一个场效应管的门极。
②TA8中控制A相绕组得电的场效应管导通,字车电机的A相绕组中有电流IA开始流动。
③因为电机的绕组有感抗,所以电流IA不能马上增大,而是逐渐增大。
④电流IA一开始流动,电流检测电阻R104的两端便产生检测电压VI,因为R104是固定的1Ω,所以VI 随IA的增大而逐渐增大。
⑤门阵列的DAO脚输出一组脉冲波形经LPF(低通滤波)电路,变成模拟电压VA送到电压比较器的反相输入端,该脉冲的脉冲宽度可调,用于设定字车电机绕组中通过电流的大小。
其脉冲宽度由软件设定,不同的脉冲宽度代表不同的电流大小。
⑥电压比较器IC11在VI=VA时,送出一个高电平信号CMPA到门阵列内部的断续开关控制回路。
⑦门阵列在接到高电平的CMPA信号后,将字车电机驱动控制信号CRA转为低电平,在一定时间内关闭控制字车电机A相导通的场效应管。
⑧场效应管关闭,字车电机A相绕组中不再有电流流动。
⑨经过一定时间后,控制A相绕组导通的场效应管再次被打开,A相绕组中又有电流流动,直到VI=VA,即A相绕组中的电流IA与设定的电流相等。
2.3 特点总结这种电路的特点是由4个相位控制三极管以高频斩波的方式来控制电机的转动和工作电流。
由于电路取消了公共通路控制环节,因此另外加设了IC11等外围电路来检测电机工作电流,通过门阵电路进行控制。
因此必须要单独输出一个工作电流信号即DAO。
由他来表示需要步进电机用多大的电流来产生驱动力矩。
当然这个信号电压愈高;电机的工作电流愈大;步进电机输出的扭动力矩就愈大。
由于它是通过相位控制三极管来控制工作电流因此当电机需要锁定时,只需要将DAO信号降低到一定电压,驱动电路自动将某一项的工作电流降低从而实现锁定。
这是他和上一节讲述的驱动电路的本质区别他的优点是,整个驱动电路的输出功率比较大,同时构成电路的元器件成本比较低,只有一个大功率器件(sta5012)就可以了。
缺点是电路构成比较复杂,电路需要的器件比较多。
所以故障率比较高一点。
2.4 应用电路介绍这种电路在star系列打印机中应用比较广泛尤其是AR3200+;DS5400II;DS6400II;DS3200II等打印机中被用于驱动字车电机。
同时在DS6400II中走纸电机也是使用类似电路驱动的。
3恒流斩波驱动电路3.1 电路组成3.2 工作原理DS-3200III打印机采用SLA7026M步进电机驱动器组成字车驱动与控制回路,是一种恒流斩波型驱动系统,用1-2相和2-2相两种激励方式。
图4-37(1)给出一相的驱动电路等效图,其电流波形如图4-37(2)所示。
(1)当一个相位信号的相位数据输入字车电机驱动电路时(低电平有效),或非门OR输出为高电平,三极管VT导通。
电流IL通过Lb、VT、Rsa到地。
若数据为“1”,VT截止(2)从RefA送入模拟电压,用于设定电机工作电流。
该电压分为7级用设定电机不同的工作电流。
(3)当电流流过电阻Rsa时便产生电压Vsa,通过R2送入比较器COM输负输入端,当Vsa≥Refa时比较器输出为零,施密特比较器CMP输出为1,或非门输出为零于是三级VT截止,流过电机线圈的电流IL为零。
Vsa 也等于零。
(4)由于COM负输入电压为零,电压比较器输出端截止,5V通过电阻R1给电容Cd充电,当Cd的电压充到T2时施密特比较器翻转输出为零,于是三级管VT再次导通直到Vsa=Refa,即电机绕组中的电流IL与设定的电流相等。
重复上述过程,使电机线圈上形成斩波波形。
图中T1为三极管从导通转为截止的时刻,Ton为三极管的导通周期。
DS-3200III字车电机控制与驱动电路如4-38所示。
图(1)4-37字车电机驱动电路等效图图4-37(2)斩波型恒定电流波形图4-38 DS-3200III打印机字车电机控制与驱动电路图4-39 激励方式S LA7026M是一种步进电机控制带功率放大的专用集成芯片,共有18条引脚,其内部电路图如图4-40所示,其引脚号和名称见下表。
引脚号名称引脚号名称1 OUT A 输出A 10 RSB 源电阻端2 TdA 时间数值端11 OUT B 输出B3 REF A 参考点A 12 VSB 电源B4 GNDA 地A 13 TdB 时间数值端B5 IN A 输入A 14 REFB 参考点B6 IN A 输入A 15 GNDB 地B7 VSA 电源A 16 IN B 输入B8 OUT A 输出A 17 IN B 输入B9 RSA 源电阻端18 OUT B 输出B字车电机的相位控制信号来自CPU(TMP90C041)的P60、P62、P61、和P63端口,输入到步进电机驱动器SLA7026M的输入端INA、INA、INB和INB,由其输出端OUTA、OUTA、OUTB和OUTB输出,供字车电机4相绕组φ1、φ2、φ3和φ4。
由专用门阵列电路D65012CW-ZB2的CRC0、CRC1、CRC2和CRC3端口发出的VT10、VT11、VT12和VT13导通或截止,这4只三极管的导通或截止,可组合7种参考电源选择信号,以供电机工作在7种打印方式。
图4-40 SLA7026M内部电路图被输入电机的电流值通过电源选择信号RefA和RefB决定,用三极管(TR10、TR11、TR12、TR13)匹配电源选择信号电压来提供七个可供选择的级别。
3.3 特点总结这种电路的工作原理和第2节所讲述的驱动电路相类。
只是它采用了一片大功率驱动电路完成了所有的功能,因此更加简介。
由于电路结构不同因此关于斩波控制是由驱动电路内部电路结合定时电容来完成的。
由于电路取消了公共通路控制环节,因此它也需要单独输入一个工作电流信号即DAO。
驱动电路依据这个信号电压的高低来自动调整斩波的截止时间来控制电机的驱动电流。
占空比由他来表示需要步进电机用多大的电流来产生驱动力矩。
当然这个信号电压愈高;电机的工作电流愈大;步进电机输出的扭动力矩就愈大。
这个电路关于步进电机的锁定控制原理和上一节是一样的这里不再复述。
这个驱动电路的优点是,整个驱动电路的输出功率比较大,结构也简单,至需要一个大功率集成电路就可以了。
缺点是集成电路属专用电路不易购得,同时单价比较高。
3.4 应用电路介绍在DS5400III等列打印机中采用STA7101M构成驱动电路,他的工作原理和SLA7026相类似,不同之处是SLA7026在控制斩波开关时间时是通过2,13连接两个小电容,通过电容的充放电来控制斩波时间。