FSR原边反馈反激式变换器及基本知识
- 格式:ppt
- 大小:3.71 MB
- 文档页数:5

反激式工作原理
反激式工作原理是一种常见的技术,被广泛用于无线通信设备和雷达系统中。
它基于利用反馈回路中的正反馈效应来产生放大和振荡。
在反激式工作原理中,系统通过将一部分输出信号反馈到输入端来实现放大。
当输入信号经过放大后,一部分输出信号被提取出来并送回输入端。
这些反馈信号与输入信号相加,产生新的输入信号。
由于反馈信号被放大了,所以这个过程会导致信号的持续增大。
通过适当的控制条件,系统将达到稳定工作状态,并产生所需的输出信号。
反激式工作原理的一个重要应用是在放大器中。
在放大器中,输入信号通过放大电路被放大,在经过反馈回路后,一部分被放大的输出信号又被送回放大电路的输入端。
这样一来,放大电路会不断放大输入信号,直到达到稳定的工作状态。
这种工作原理能够实现高增益和稳定性,并被广泛应用于无线通信设备和音频放大器等领域。
除了放大器,反激式工作原理也可以用于产生振荡。
振荡器是一种产生稳定的周期信号的电路或设备,常用于无线电频率合成器、时钟电路等场合。
在振荡器的反馈回路中,放大电路会产生正反馈,导致信号的持续增长,进而产生振荡。
总之,反激式工作原理通过正反馈效应实现放大和振荡。
在放大器中,它能够实现高增益和稳定性;在振荡器中,它能够产
生稳定的周期信号。
这种工作原理的应用广泛,对于现代通信技术和电子设备的发展起到了重要作用。
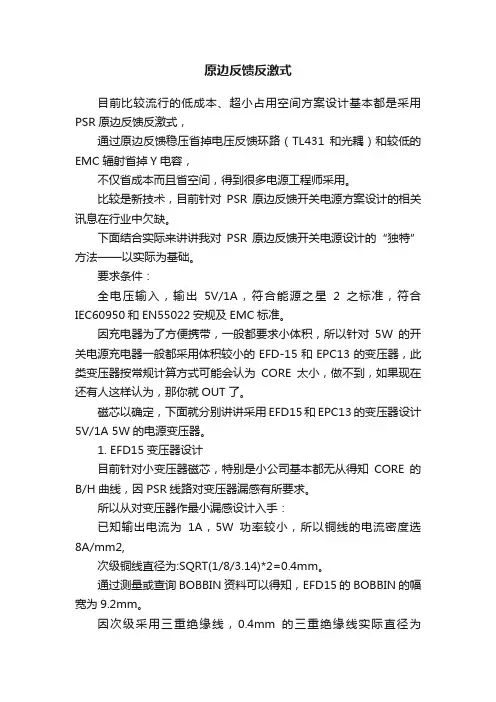
目前比较流行的低成本、超小占用空间方案设计基本都是采用PSR原边反馈反激式,通过原边反馈稳压省掉电压反馈环路(TL431和光耦)和较低的EMC辐射省掉Y电容,不仅省成本而且省空间,得到很多电源工程师采用。
比较是新技术,目前针对PSR原边反馈开关电源方案设计的相关讯息在行业中欠缺。
下面结合实际来讲讲我对PSR原边反馈开关电源设计的“独特”方法——以实际为基础。
要求条件:全电压输入,输出5V/1A,符合能源之星2之标准,符合IEC60950和EN55022安规及EMC标准。
因充电器为了方便携带,一般都要求小体积,所以针对5W的开关电源充电器一般都采用体积较小的EFD-15和EPC13的变压器,此类变压器按常规计算方式可能会认为CORE太小,做不到,如果现在还有人这样认为,那你就OUT了。
磁芯以确定,下面就分别讲讲采用EFD15和EPC13的变压器设计5V/1A 5W的电源变压器。
1. EFD15变压器设计目前针对小变压器磁芯,特别是小公司基本都无从得知CORE的B/H曲线,因PSR线路对变压器漏感有所要求。
所以从对变压器作最小漏感设计入手:已知输出电流为1A,5W功率较小,所以铜线的电流密度选8A/mm2,次级铜线直径为:SQRT(1/8/3.14)*2=0.4mm。
通过测量或查询BOBBIN资料可以得知,EFD15的BOBBIN的幅宽为9.2mm。
因次级采用三重绝缘线,0.4mm的三重绝缘线实际直径为0.6mm.为了减小漏感把次级线圈设计为1整层,次级杂数为:9.2/0.6mm=15.3Ts,取15Ts.因IC内部一般内置VDS耐压600~650V的MOS,考虑到漏感尖峰,需留50~100V的应力电压余量,所以反射电压需控制在100V以内,得:(Vout+VF)*n<100,即:n<100/(5+1),n<16.6,取n=16.5,得初级匝数NP=15*16.5=247.5取NP=248,代入上式验证,(Vout+VF)*(NP/NS)<100,即(5+1)*(248/15)=99.2<100,成立。
电源设计中的原边反馈控制和副边反馈控制方案分析-技术方案一、原边反馈控制、副边反馈控制方案分析PSR(Primary Side Regulator)即原边反馈,用于反激式开关电源中,其利用辅助线圈来提取副边线圈上的输出电压信号。
由于辅助线圈与副边线圈上的电压与匝数比有关,且在副边线圈去磁结束点(即线圈上的电流下降至零时),电源输出电压等于副边线圈上的电压,采样该反馈电压信号,经控制芯片处理得到理想的PWM控制信号,用于控制原边侧功率管的开关,功率管的开关时间决定了变压器上能量储存的多少,从而也直接影响了副边输出电压的大小。
利用这一系列的反馈关系,终可得到稳定的电压输出。
SSR(Secondary Side Regulator)即副边反馈,副边反馈控制技术是发展较早的反激式开关电源控制技术,其对输出电压的提取过程直接在变压器的副边电压输出端完成,因此需要在副边增加光耦、TL431及相关阻容元件,其中TL431为误差放大器,能够实时监测输出电压,并将监测结果以电流的形式通过光耦反馈至原边,同时保证输入端与输出端的隔离。
二、两者的比较如下为思睿达原边反馈控制(PSR)方案和副边反馈控制(SSR)方案。
C6267原边反馈控制方案C5269S副边反馈控制方案三、原边、副边方案如何选?比如在充电器领域,直接对电池充电的应用,一般会对空载电压精度要求高,可以选择副边电源IC+恒流芯片来做。
通过电池管理芯片,对电池充电的。
因为电池管理芯片会有过压和过流保护,可以直接选用原边方案来进行,这样成本相对于副边的方案来说会降低很多。
有时候也可以和客户讨论客户的设计方案来降低成本,引导客户开案。
如在LED灯领域,每串灯珠的前面没有加上一个限流电阻。
那么,在电源线路设计中,用副边方案的IC+高精度恒流方案来做,价格较高;用原边方案,原边的恒流精度在生产中很难达到客户的要求。
但是在每串灯珠的前面加上一个限流电阻,那么就可以直接用原边方案来进行设计,既可达到客户要求,又可以节约成本。
5.2 反激变换器反激变换器就是在Buck-Boost变换器的开关管与续流二极管之间插入高频开关变压器,从而实现输入与输出电气隔离的一种DC-DC变换器,因此,反激变换器实际上就是带隔离的Buck-Boost变换器。
反激变换器能量传输的时机与正激变换器正好相反,它是在开关关断期间向负载传输能量。
由于反激变换器的高频变压器除了起变压作用外,还相当于一个储能电感,因此,反激变换器也称之为“电感储能式变换器”或“电感变换器”。
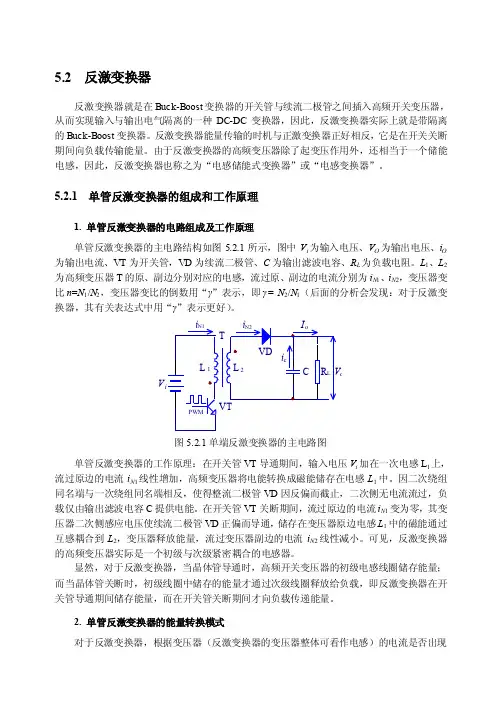
5.2.1 单管反激变换器的组成和工作原理1. 单管反激变换器的电路组成及工作原理单管反激变换器的主电路结构如图5.2.1所示,图中V i为输入电压、V O为输出电压、i O 为输出电流、VT为开关管,VD为续流二极管、C为输出滤波电容、R L为负载电阻。
L1、L2为高频变压器T的原、副边分别对应的电感,流过原、副边的电流分别为i N1、i N2,变压器变比n=N1/N2,变压器变比的倒数用“γ”表示,即γ= N2/N1(后面的分析会发现:对于反激变换器,其有关表达式中用“γ”表示更好)。
oV图5.2.1单端反激变换器的主电路图单管反激变换器的工作原理:在开关管VT导通期间,输入电压V i加在一次电感L1上,流过原边的电流i N1线性增加,高频变压器将电能转换成磁能储存在电感L1中。
因二次绕组同名端与一次绕组同名端相反,使得整流二极管VD因反偏而截止,二次侧无电流流过,负载仅由输出滤波电容C提供电能。
在开关管VT关断期间,流过原边的电流i N1变为零,其变压器二次侧感应电压使续流二极管VD正偏而导通,储存在变压器原边电感L1中的磁能通过互感耦合到L2,变压器释放能量,流过变压器副边的电流i N2线性减小。
可见,反激变换器的高频变压器实际是一个初级与次级紧密耦合的电感器。
显然,对于反激变换器,当晶体管导通时,高频开关变压器的初级电感线圈储存能量;而当晶体管关断时,初级线圈中储存的能量才通过次级线圈释放给负载,即反激变换器在开关管导通期间储存能量,而在开关管关断期间才向负载传递能量。
原边反馈反激式目前比较流行的低成本、超小占用空间方案设计基本都是采用PSR原边反馈反激式,通过原边反馈稳压省掉电压反馈环路(TL431和光耦)和较低的EMC辐射省掉Y电容,不仅省成本而且省空间,得到很多电源工程师采用。
比较是新技术,目前针对PSR原边反馈开关电源方案设计的相关讯息在行业中欠缺。
下面结合实际来讲讲我对PSR原边反馈开关电源设计的“独特”方法——以实际为基础。
要求条件:全电压输入,输出5V/1A,符合能源之星2之标准,符合IEC60950和EN55022安规及EMC标准。
因充电器为了方便携带,一般都要求小体积,所以针对5W的开关电源充电器一般都采用体积较小的EFD-15和EPC13的变压器,此类变压器按常规计算方式可能会认为CORE太小,做不到,如果现在还有人这样认为,那你就OUT了。
磁芯以确定,下面就分别讲讲采用EFD15和EPC13的变压器设计5V/1A 5W的电源变压器。
1. EFD15变压器设计目前针对小变压器磁芯,特别是小公司基本都无从得知CORE的B/H曲线,因PSR线路对变压器漏感有所要求。
所以从对变压器作最小漏感设计入手:已知输出电流为1A,5W功率较小,所以铜线的电流密度选8A/mm2,次级铜线直径为:SQRT(1/8/3.14)*2=0.4mm。
通过测量或查询BOBBIN资料可以得知,EFD15的BOBBIN的幅宽为9.2mm。
因次级采用三重绝缘线,0.4mm的三重绝缘线实际直径为0.6mm.为了减小漏感把次级线圈设计为1整层,次级杂数为:9.2/0.6mm=15.3Ts,取15Ts.因IC内部一般内置VDS耐压600~650V的MOS,考虑到漏感尖峰,需留50~100V的应力电压余量,所以反射电压需控制在100V以内,得:(Vout+VF)*n<100,即:n<100/(5+1),n<16.6,取n=16.5,得初级匝数NP=15*16.5=247.5取NP=248,代入上式验证,(Vout+VF)*(NP/NS)<100,即(5+1)*(248/15)=99.2<100,成立。
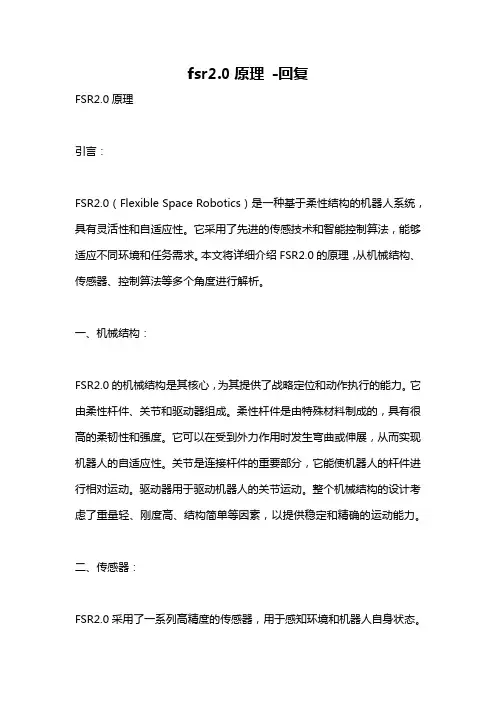
fsr2.0原理-回复FSR2.0原理引言:FSR2.0(Flexible Space Robotics)是一种基于柔性结构的机器人系统,具有灵活性和自适应性。
它采用了先进的传感技术和智能控制算法,能够适应不同环境和任务需求。
本文将详细介绍FSR2.0的原理,从机械结构、传感器、控制算法等多个角度进行解析。
一、机械结构:FSR2.0的机械结构是其核心,为其提供了战略定位和动作执行的能力。
它由柔性杆件、关节和驱动器组成。
柔性杆件是由特殊材料制成的,具有很高的柔韧性和强度。
它可以在受到外力作用时发生弯曲或伸展,从而实现机器人的自适应性。
关节是连接杆件的重要部分,它能使机器人的杆件进行相对运动。
驱动器用于驱动机器人的关节运动。
整个机械结构的设计考虑了重量轻、刚度高、结构简单等因素,以提供稳定和精确的运动能力。
二、传感器:FSR2.0采用了一系列高精度的传感器,用于感知环境和机器人自身状态。
其中包括摄像头、激光雷达、力传感器和惯性测量单元(IMU)等。
摄像头用于获取环境图像信息,可以识别、跟踪和定位目标物体。
激光雷达能够扫描环境中的物体,并生成其三维点云地图,为机器人的路径规划和避障提供支持。
力传感器能够测量机器人与外界物体之间的力和力矩,从而实现对物体的操作和控制。
IMU可以测量机器人的加速度和角速度,提供姿态和运动信息。
这些传感器的数据可以通过算法融合,从而提高机器人的感知能力和决策能力。
三、控制算法:FSR2.0的控制算法是整个系统的大脑,负责决策、规划和控制机器人的行为。
控制算法可以分为两个层次,即高层决策和低层控制。
高层决策负责制定机器人的任务目标和运动策略。
基于传感器数据和先验知识,它可以进行路径规划、避障和目标跟踪等任务。
低层控制负责具体的关节运动控制和姿态调整。
它可以根据高层决策的指令,通过PID控制算法实现关节的精确控制。
另外,FSR2.0还具有一些智能控制算法,如模糊控制、强化学习等,可以使机器人具有自主学习和自适应能力。
有源钳位反激转换器-正激式转换器反激转换器一正激式转换器(Fly,Forward CONVERTER)最早由美国IR公司提出。
大家知道,正激式转换器和反激式转换器都可应用于中小功率高频开关电源。
其主要缺点是开关管的电压应力高,正激式转换器需要采用特殊的磁复位措施,而反激式转换器的输出纹波大。
将正激式转换器和反激式转换器组合在一起,可以综合两种转换器的优点,在一定程度上可以克服两者的缺点。
并实现ZVS、自动可靠地磁复位、较低的电压应力等。
日本矢代于1994年提出的有源钳位反激,正激式转换器电路如图5,13所示。
正激式转换器和反激式转换器的变压器Tr1、Tr2的初级绕组相串联,共用一个主开关管V1和一个钳位电路,钳位电路并联在Tr1、Tr2初级串联绕组上。
后来派生出来的一些反激一正激式转换器,只用一个变压器,其次级用中点抽头整流或倍流整流输出电路。
研究图5,13电路可以发现,输出端没有滤波电感。
图5,13电路的组合方式,使两个转换器在一个周期内分别向负载供电,变压器次级并联交错输出。
因此无须另外再接续流二极管,由于输出纹波小,也无须加滤波电感。
对正激式转换器来说,因为初级串联了一个反激式转式换器的电感(即变压器),相当于将输出滤波电感从次级移到了初级。
图5,13所示的反激一正激式转换器图5,13所示的反激一正激式转换器,在一个开关周期内有8种开关模式,见表5,3。
表中uDS1为主开关管V1端电压。
表5,3图5,13的主要特点是,主开关管和钳位开关管都实现了ZVS,使开关损耗减少,电路转换效率提高.和有源钳位正激式转换器一样,钳位电容上的电压为主开关管上的电压uDS1被钳位在:boost、buck和buck-boost几种结构都是开关电源的基本的拓扑结构,所谓正激和反激,是基本结构的衍生变化,就是插入了隔离变压器,正激和反激是针对带变压器隔离的开关电源而言,有单端正激、单端反激、双端正激、双端反激及其一些不能具体概括的结构形式. 正激式原端与次端的同名端在同一方向,而反激式的在异侧呢。
基础课堂反激式电源变压器工作原理简析
作为电源变压器家族中的一员,反激式电源变压器是目前应用范围最广泛的变压器类型,在工业、电力等领域的尤其受到欢迎。
今天我们将会就这种电源变压器的工作原理,展开简要的分析和介绍,希望可以对新人工程师的学习和工作有所帮助。
下图中,图1是最基础的反激式变压器开关电源的简单工作原理图。
在这一电路系统中,Ui是开关电源的输入电压,T是开关变压器,K是控制开关,C是储能滤波电容,R是负载电阻。
图2是反激式变压器开关电源的电压输
出波形。
图1
图2
图2中所显示的反激式变压器的开关电源负载,是一个储能滤波电容和一个电阻并联。
由于反激式电源变压器的储能滤波电容的容量很大,其两端电压在运行过程中是基本不变的,而变压器次级线圈输出电压uo相当于被整流二极管和输出电压Uo进行限幅,因此,输出电压的脉冲尖峰完全被削除,
被限幅后的剩余电压幅值正好等于输出电压Uo的最大值Up,同时也等于变压器次级线圈输出电压uo的半波平均值Upa。
在反激式电源变压器的运行过程中,有一种连续与断续模式是经常出现的。
这种模式是指变压器在满载状态变压器工作于能量完全传递或不完全传递的。
有源钳位反激电路工作原理1、前言传统的硬开关反激变换器功率开关管电压、电流应力大,变压器的漏感引起电压尖峰,必须采用无源RCD吸收电路进行箝位限制,RCD吸收电路的电阻R产生额外的功率损耗,降低系统效率,如图1所示。
如果将RCD吸收电路的电阻R去掉,同时将二极管换成功率MOSFET,这样就变成了有源箝位反激变换器,通过磁化曲线在第一、第三象限交替工作,将吸收电路的电容Cc吸收的电压尖峰能量,回馈到输入电压,从而实现系统的正常工作。
2、有源箝位反激变换器工作原理非连续模式DCM有源箝位反激变换器电路结构及相关波形如上所示,图中的各个元件定义如下:Lm:变压器初级激磁电感Lr:变压器初级漏感Lp:变压器初级总电感,Lp=Lm+Lrn:变压器初级和次级的匝比,n=Np/NsQ1:主功率开关管,DQ1、CQ1为Q1寄生体二极管和寄生输出电容Cc1:Cc1=Cc+CQ1+Cto Qc:箝位开关管,DQc、CQc 为Qc寄生体二极管和寄生输出电容Do:次级输出整流二极管Cc:箝位电容Cr:CQ1、CQc以及其它杂散谐振电容Cto总和,Cr=CQ1+CQc+Cto Vsw:Q1的D、S两端电压Vin:输入直流电压Vo:输出直流电压Vc:箝位电容3、有源箝位反激变换器开关周期时序分解每个开关周期根据其工作状态可以分为8个工作状态,各个工作模式的状态及等效电路图分别讨论如下:图2:有源箝位反激变换器波形(非连续模式DCM)在t0时刻,Q1处于导通状态,Qc、Do保持关断状态。
Lp两端所加的电压为Vin,上端为Vin,下端为0V电位。
Lp激磁,其电流从0开始,随着时间线性上升。
磁芯内磁通量Ø与激磁电流成正比,随着时间线性上升。
副边电感反向截止,整流二极管反向电压为-(Vin/n+Vo)。
图3:模式1(Q1导通,Qc、Do关断)在t1时刻,Q1关断,Qc 、Do 保持关断状态。
Q1关断后,Lp 和Cr 谐振,激磁电流对1Q C 充电,对QC C 放电,Vsw 电压谐振上升。
知道开关电源原边反馈技术吗!这里有详细的解释及计算方法原边反馈(PSR)简介●在小功率消费类电子应用中,反激式电源是主流,因为反激式电源非常适合小功率段,同时天然提供了隔离的效果。
●隔离后,如果要检测输出的情况,需要用隔离元件,比如光耦等,这样就增加了电源的成本,光耦本身的寿命也会成为电源的瓶颈,基于此,开发出了原边反馈技术。
-原边反馈不从输出直接采样,而是从初级线圈采样,通过初级线圈的情况来计算次级线圈的情况,进一步推算输出的情况。
-部分信息难以从初级线圈直接得到,因此通常还使用一个辅助线圈,辅助线圈和初级线圈共地,和次级隔离辅助线圈的用途●增加辅助线圈会增加成本和复杂度,因此,最好能让辅助线圈完成更多的工作,一般辅助线圈都同时做2件事情:-反映初级线圈和次级线圈的情况,辅助线圈通过电阻分压,将原边和副边的电压情况反映在VSES点,此时辅助线圈和原边/副边构成变压器。
-和初级线圈形成一个反激结构,给IC供电,由于反激结构本身无法恒压,因此要加一个限压的二极管。
不使用辅助线圈是否可行●如果不要求辅助线圈供电,那么是否可以用其他检测方法,比如在初级线圈上检测来做原边反馈?●理论上是可行的,思路如下:-在初级线圈上并联一个高阻支路,对初级线圈进行采样,同时提供TOFF期间初级线圈的回路。
-考虑到检测电压必须为正,因此有两种基本形式,如下图:检查输出信息的方法●原边反馈不能得到所有的输出信息,但可以得到较多的输出信息。
-不能得到输出电流信息,但可以得到初级的电流信息。
-不能直接得到输出电压信息,可以通过辅助绕组来得到输出电压信息。
上次卧龙会布布熊的PCB板热仿真直播讲座录制视频己发布在我们圈子内。
具体看精华区可检测性●电感两端电压太高,检测IL和VD很困难,通过ISES和VSES 检测;●考虑到隔离要求,次级电流和输出电压不能直接检测,只能通过其他值计算出来。
PSR输出电压计算● MOS 管关断后,变压器中储存的能量都由次级和辅助线圈释放出来,次级线圈和辅助线圈形成变压器,此时VSES上的电压为:●VD和次级线圈的电流有关,电流越小,VD越小,电流为0时,VD为0。