规范标准工时评定规则(mod)
- 格式:doc
- 大小:1.16 MB
- 文档页数:18

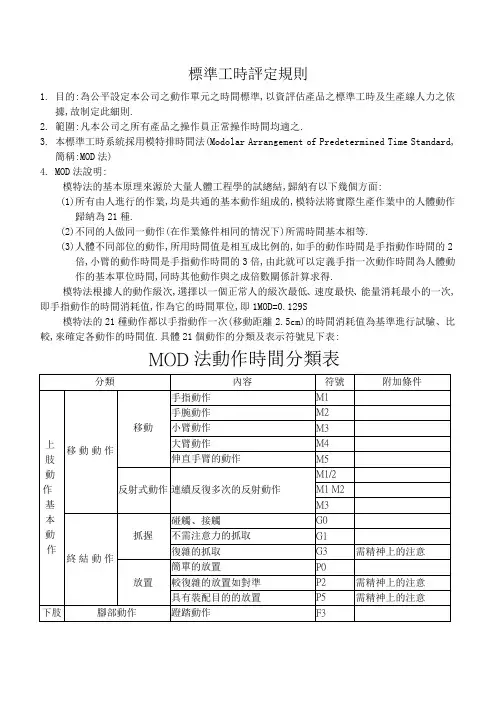
標準工時評定規則1.目的:為公平設定本公司之動作單元之時間標準,以資評估產品之標準工時及生產線人力之依據,故制定此細則.2.範圍:凡本公司之所有產品之操作員正常操作時間均適之.3.本標準工時系統採用模特排時間法(Modolar Arrangement of Predetermined Time Standard,簡稱:MOD法)4.MOD法說明:模特法的基本原理來源於大量人體工程學的試總結,歸納有以下幾個方面:(1)所有由人進行的作業,均是共通的基本動作組成的,模特法將實際生產作業中的人體動作歸納為21種.(2)不同的人做同一動作(在作業條件相同的情況下)所需時間基本相等.(3)人體不同部位的動作,所用時間值是相互成比例的,如手的動作時間是手指動作時間的2倍,小臂的動作時間是手指動作時間的3倍,由此就可以定義手指一次動作時間為人體動作的基本單位時間,同時其他動作與之成倍數關係計算求得.模特法根據人的動作級次,選擇以一個正常人的級次最低、速度最快、能量消耗最小的一次,即手指動作的時間消耗值,作為它的時間單位,即1MOD=0.129S模特法的21種動作都以手指動作一次(移動距離2.5cm)的時間消耗值為基準進行試驗、比較,來確定各動作的時間值.具體21個動作的分類及表示符號見下表:MOD法動作時間分類表由上表知,MOD法把人的動作分成上肢、下肢、其他等動作,分別由符號M、G、P、F、W……代表,符號後僅賦予數字1、2、3……代表模特時間值,如M1代表1MOD=0.129SEC,M2即代表2MOD、以此類推.5.本公司MOD法制定標準工時基準如下:(1)以MOD分析之正常時間(即100%效率水準).(2)本細則規定之標準作業距離為20CM.(3)私事寬放:因本廠採取中休制度,故寬放率為0%.(4)疲勞寬放:因本廠作業強度屬輕、中度作業,故取寬放標準為15%.(5)作業寬放:如,a.臺及場地的簡單清潔與準備,包括轉換產品品種時的時間消耗.b.來料及零件不良造成的停頓.(SMT零件腳寬不準)c.現場監督者與檢查員臨時抽檢及口頭指示造成的偶發停頓.d.上下工位的傳遞中偶發問題等.以上各寬放平均取:3%.(6)特殊寬放:如管理寬放、小批量的寬放、獎勵寬放、機械幹擾的寬放、不同作業人群的寬放等,平均取:2%.和計以上可知本公司取平均寬放率為20%.以上為一般正常狀況之基準,如產品設計或工作環境等有異常時,得酌情修正.6.標準工時如下各頁所示.6.1.1 DIP H/I段插件工時如下:線圈(二)二极體高腳二极體晶體(一)跳線晶體(二)ICF USE(一)F USE(二)IC線材(一)線材(一)Component ComponentType of ComportmentMOD 數(Sec) 備注線圈(二) coil 2左手: M4M2G3M4R2*4P5332.6右手: G3M4R2*4P5M4M2二極體 horizontal diode 左手: M4M2G3M4R2*3P5312.4右手: G3M4R2*3P5M4M2二極體 high lead dopde左手: M4M2G3M4R2*3P5R233 2.6右手: G3M4R2*3P5R2M4M2晶體(一) transistor 1左手: M4M2G3M4R2*3P530 2.3右手: G3M4R2*3P5M4M2 跳線 jumper wire左手:M4M2G3M4R2*3P5312.4右手: G3M4R2*3P5M4M2晶體(二) transistor 2左手: M4M2G3M4R2*3P5312.4右手: G3M4R2*2P5R2M4M2 IC ic<101eads左手: M4M2G3M4R2R2*2R2*2P533 2.6右手: G3M4R2R2*2R2*2P5M4M2 FUSE(一)左手: M4M2G3M4R2*2P5272.1右手: G3M4R2*2P5M4M2 FUSE(二)左手: M4M2G3M4R2*3P5312.4右手: G3M4R2*3P5M4M2 IC ic>101eads左手: M4M2G3M4R2R2*3R2*3P5403.1右手: G3M4R2R2*3R2*3P5M4M2線材(一) 插單邊左手: M4M2G3M4R2P5BD29 2.2右手: BDM4M2G3M4R2P5線材(一) 插雙邊 L<20CM左手: M4M2G3M4R2P5M4R2P5BD433.3右手: BDM4M2G3M4R2P5M4R2P5排線(一)線材(一)排線(一)排線(一)Soc ke t(1)Soc ke t(2)P in1P in2Slide s w itc h 線材(二)Component ComponentType of ComportmentMOD 數(Sec)備注線材(一) 插雙邊 L>20CM 左手:M4M2G3M4R2P5M4M4R2P5BD473.6右手:BDM4M2G3M4R2P5M4M4R2P5 排線(一)插單邊Ribbon wire2 (insert 1 ends)左手: M4M2G3M4M2R2P5BD332.6右手: BDM4M2G3M4M2R2P5排線(一)插雙邊Ribbon wire2 (insert 2 ends)L<20CM 左手: M4M2G3M4M2R2P5M4M2R2P5BD554.3右手: BDM4M2G3M4M2R2P5M4M2R2P5排線(一)插雙邊 Ribbon wire2 (insert 2 ends) L>20CM 左手: M4M2G3M4M2R2P5M4M4M2R2P5BD554.3右手: BDM4M2G3M4M2R2P5M4M4M2R2P5Socket(一) <=4way左手: M4M2G3M4R2*3P5302.3右手: G3M4R2*3P5M4M2 Socket(二) >=5way左手:M4M2G3M4R2*4P5332.6右手: G3M4R2*4P5R2M4M2pin one pin 左手: M4M2G3M4R2P5251.9右手: G3M4R2P5M4M2 端子 solder tag左手:M4M2G3M4R2*2P527 2.1右手:G3M4R2*2P5M4M2 slide switch/ detector assembly 左手: M4M2G3M4R2*3P5312.4右手: G3M4R2*2P5R2M4M2 線材(二) 插單邊wire assembly 2 (insert ends)左手: M4M2R2G3M4(R2P5)*N*BD23+7*N1.8+0.9*N右手:G3M4(R2P5)*N*BDM4M2R2T unc rLEDT r 1T r 2ComponentShape of ComponentType of ComportmentMOD 數Insertion (Sec)備注Tuncr左手: M4M2G3M4R2R2*3R2*3P540 3.1右手: G3M4R2R2*3R2*3P5M4M2 LED左手: M4M2G3M4M2R2P529 2.2右手: G3M4M2R2P5M4M2 Line Driertransformer(一)左手: M4M2G3M4R2*3P5312.4右手: G3M4R2*3P5M4M2 Transformer(二)左手: M4M2G3M4M2R2P529 2.2右手: G3M4M2R2P5M4M2CONN 4PCONN 9P -MCOP WRCO2*10PCONN 6PCONN 4P DP 2X13PDP 2X20PDP 2X2PDP 2X3PDP 2X4P ComponentComponentType of ComportmentMOD 數(Sec)備注CONN-4P WAFER(L) CD-IN 連接器-4P左手: M4M2G3M4M2R2P5292.2右手: G3M4M2R2P5M4M2 CONN-9P-MCOM1左手: M4M2G3M4R2*3R2*3P5 37 2.9右手: G3M4R2*3R2*3R5M4M2 CONN-ATX PWRPOWER CONN2X10P左手: M4M2G3M4R2R2*3R2*3P5403.1右手: G3M4R2R2*3R2*3P5M4M2CONN-CIN 6PDUALMOUSE/KEYBOARD左手: M4M2G3M4R2R2*3R2*3P5403.1右手: G3M4R2R2*3R2*3P5M4M2 CONNECTOR 4X1P左手:M4M2G3M4R2*4P5332.6右手: G3M4R2*4P5R2M4M2 DOUBLE PIN 2X13-25 FEATURE左手: M4M2G3M4R2R2*3R2*3P5403.1右手: G3M4R2R2*3R2*3P5M4M2 DOUBLE PIN2X20P左手: M4M2G3M4R2R2*3R2*3P5403.1右手: G3M4R2R2*3R2*3P5M4M2 DOUBLE PIN2X2P WIE 左手: M4M2G3M4R2*3P5312.4右手: G3M4R2*3P5M4M2DOUBLE PIN 2X3P BUS RATIO 左手: M4M2G3M4R2R2*2R2*2P5332.6右手: G3M4R2R2*2R2*2P5M4M2 DOUBLE PIN2X4PVCORE CPU CLOCK左手: M4M2G3M4R2R2*2R2*2P5332.6右手: G3M4R2R2*2R2*2P5M4M2DP 2X5PDP 2X8PEP R32PF USEHEAT SINK ACE P J5PP H2*20PP H2*5PP WRCONN12PREGSLP 2PComponentComponentType of ComportmentMOD 數(Sec) 備注DOUBLE PIN2X5P左手: M4M2G3M4R2R2*2R2*2P5332.6右手: G3M4R2R2*2R2*2P5M4M2 DOUBLE PIN2X8P-14SLEEP PWRS/W左手: M4M2G3M4R2*3R2*3P5372.9右手: G3M4R2*3R2*3R5M4M2 F EPROM LCC32P左手: M4M2G3M4R2R2*3R2*3P5403.1右手: G3M4R2R2*3R2*3P5M4M2FUSE(POLY SW)1.6A 2腳左手: M4M2G3M4R2*3P5R2332.6右手: G3M4R2*3P5R2M4M2HEAT SINK ACE (有鎖螺絲)左手: M4M2G3M4R2*3R2*3P537 2.9右手: G3M4R2*3R2*3R5M4M2 PHONE JACK5P左手: M4M2G3M4R2R2*2R2*2P5332.6右手: G3M4R2R2*2R2*2P5M4M2PIN HEADER2X20P IDE 左手: M4M2G3M4R2R2*3R2*3P5403.1右手: G3M4R2R2*3R2*3P5M4M2PIN HEADER2X5P WIE 左手: M4M2G3M4R2*3R2*3P5372.9右手: G3M4R2*3R2*3R5M4M2 POWER CONN12P左手:M4M2G3M4R2*4P5332.6右手: G3M4R2*4P5R2M4M2REGULATOR左手: M4M2G3M4R2R2*2R2*2P5332.6右手: G3M4R2R2*2R2*2P5M4M2SINGLE PIN 2P左手: M4M2G3M4M2R2P529 2.2右手: G3M4M2R2P5M4M2´¡¥ó®É¶¡¬ã¨s¤@Äýªí´¡¥ó®É¶¡¬ã¨s¤@Äýªí6.1.2 DIP H/I段切板、上插銷及目檢工時:6.2 DIP T/U段一般動作標準:。


课程名称MOD法标准工时培训时间1天(6课时)讲师洪剑坪课程描述预定时间标准法,是国际公认的制定时间标准的先进技术。
它利用预先各种动作制定的时间标准来确定各种操作所需要的时间,而不是通过直接观察和测定。
主要方法有MTM法、WF法、MOD法等。
培训对象企业领导者、生产厂长、主管、工程QA\QC部门等主管﹑IE﹑PE﹑QE 等工程师﹑现场管理及技术人员等。
课程大纲第一章动作时间分析方法:MOD法原理1、动作经济的基本原则2、关于人体的使用原则3、关于工作场所的布置原则4、关于工具和设备的设计原则5、操作动作在MOD法中归纳为21种6、同一个动作(在条件相同的情况下)所需的时间基本上相等;7、身体不同部位动作时,其动作所用的时间值互成比例;第二章MOD法的特点1、易懂、易学、易记(1) 模特法将动作归纳为21种。
比其他方法要少很多。
(2) 把动作符号和时间值融为一体,在动作符号上直接能计算出时间值。
(3)MOD法中不同的时间值只有8个很容易计算。
2、方便实用(1) 采用模特法不需要测时,就能根据动作决定出正常时间。
(2) 模特法计算时间值的精度比较高。
第三章MOD法动作介绍1、基本动作---------上肢动作(1)移动动作(M)M1, 手指动作分析与举例M2,手的动作分析与举例M3,小臂的动作分析与举例M4,大臂的动作分析与举例M5,大臂尽量伸直的动作分析与举例(2)终结动作,分为抓取动作和放置动作G0,触摸动作分析与举例G1,简单的抓取动作分析与举例G3,复杂的抓取动作分析与举例P0,简单的放置动作分析与举例P2,需要注意的放置动作分析与举例P5,需要有注意力复杂的放置动作分析与举例(3)反射动作(也称作特殊移动动作)(4)同时动作2、身体及其他动作F3脚踏动作分析与举例W5步行动作分析与举例B17身体弯曲动作分析与举例S30站起来再坐下去的动作分析与举例L1搬运动作的重量因素分析与举例E2目视动作分析与举例R2矫正动作分析与举例D3判断动作分析与举例A4施加压力分析与举例C4旋转动作分析与举例3、其他符号BD延时H保持UT有效时间除了人的动作之外的机器或其他所有的加工时间。
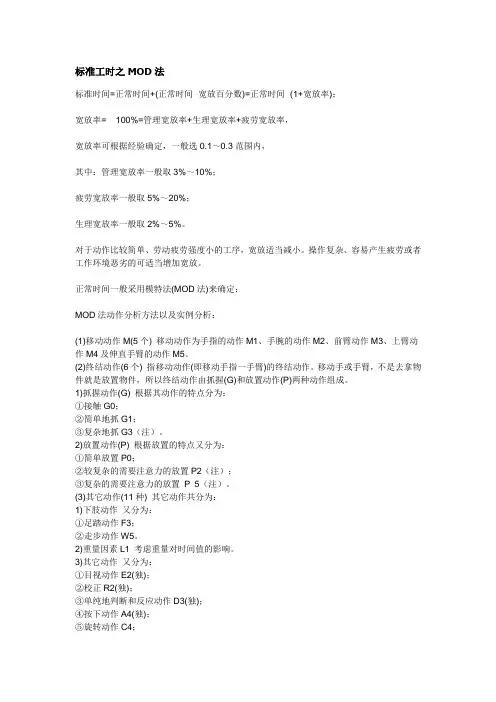
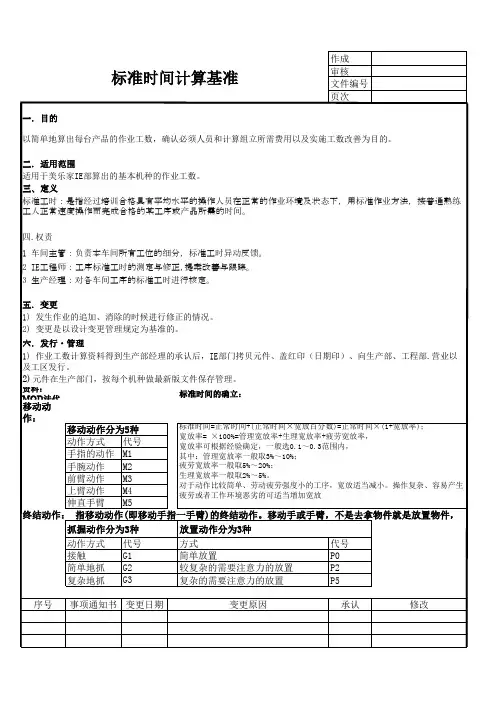
标准工时之MOD法标准时间=正常时间+(正常时间×宽放百分数)=正常时间×(1+宽放率);宽放率= ×100%=管理宽放率+生理宽放率+疲劳宽放率,宽放率可根据经验确定,一般选0.1~0.3范围内,其中:管理宽放率一般取3%~10%;疲劳宽放率一般取5%~20%;生理宽放率一般取2%~5%。
对于动作比较简单、劳动疲劳强度小的工序,宽放适当减小。
操作复杂、容易产生疲劳或者工作环境恶劣的可适当增加宽放。
正常时间一般采用模特法(MOD法)来确定;MOD法动作分析方法以及实例分析:(1)移动动作M(5个) 移动动作为手指的动作M1、手腕的动作M2、前臂动作M3、上臂动作M4及伸直手臂的动作M5。
(2)终结动作(6个) 指移动动作(即移动手指一手臂)的终结动作。
移动手或手臂,不是去拿物件就是放置物件,所以终结动作由抓握(G)和放置动作(P)两种动作组成。
1)抓握动作(G) 根据其动作的特点分为:①接触G0;②简单地抓G1;③复杂地抓G3(注)。
2)放置动作(P) 根据放置的特点又分为:①简单放置P0;②较复杂的需要注意力的放置P2(注);③复杂的需要注意力的放置P 5(注)。
(3)其它动作(11种) 其它动作共分为:1)下肢动作又分为:①足踏动作F3;②走步动作W5。
2)重量因素L1 考虑重量对时间值的影响。
3)其它动作又分为:①目视动作E2(独);②校正R2(独);③单纯地判断和反应动作D3(独);④按下动作A4(独);⑤旋转动作C4;⑥弯体动作B17(往);⑦坐下起身动作S30。
4.模特法的动作分析(1)基本动作——上肢动作1)移动动作(M) 移动动作包括5种,分别以手指、手和手臂进行作业来区分。
①手指动作M1 表示用手指的第三个关节前的部分进行的动作,每动作一次时间值为1MO D,相当于手指移动了2.5cm的距离。
②手的动作M2 用腕关节以前的部分进行的动作,当然也包括了手指的动作,每进行一次为2MOD,相当于动作距离为5cm左右。
标准⼯时评定规则(mod)標準⼯時評定規則1.⽬的:為公平設定本公司之動作單元之時間標準,以資評估產品之標準⼯時及⽣產線⼈⼒之依據,故制定此細則.2.範圍:凡本公司之所有產品之操作員正常操作時間均適之.3.本標準⼯時系統採⽤模特排時間法(Modolar Arrangement of Predetermined Time Standard,簡稱:MOD法)4.MOD法說明:模特法的基本原理來源於⼤量⼈體⼯程學的試總結,歸納有以下幾個⽅⾯:(1)所有由⼈進⾏的作業,均是共通的基本動作組成的,模特法將實際⽣產作業中的⼈體動作歸納為21種.(2)不同的⼈做同⼀動作(在作業條件相同的情況下)所需時間基本相等.(3)⼈體不同部位的動作,所⽤時間值是相互成⽐例的,如⼿的動作時間是⼿指動作時間的2倍,⼩臂的動作時間是⼿指動作時間的3倍,由此就可以定義⼿指⼀次動作時間為⼈體動作的基本單位時間,同時其他動作與之成倍數關係計算求得.模特法根據⼈的動作級次,選擇以⼀個正常⼈的級次最低、速度最快、能量消耗最⼩的⼀次,即⼿指動作的時間消耗值,作為它的時間單位,即1MOD=0.129S模特法的21種動作都以⼿指動作⼀次(移動距離2.5cm)的時間消耗值為基準進⾏試驗、⽐較,來確定各動作的時間值.具體21個動作的分類及表⽰符號⾒下表:MOD法動作時間分類表由上表知,MOD法把⼈的動作分成上肢、下肢、其他等動作,分別由符號M、G、P、F、W……代表,符號後僅賦予數字1、2、3……代表模特時間值,如M1代表1MOD=0.129SEC,M2即代表2MOD、以此類推.5.本公司MOD法制定標準⼯時基準如下:(1)以MOD分析之正常時間(即100%效率⽔準).(2)本細則規定之標準作業距離為20CM.(3)私事寬放:因本廠採取中休制度,故寬放率為0%.(4)疲勞寬放:因本廠作業強度屬輕、中度作業,故取寬放標準為15%.(5)作業寬放:如,a.臺及場地的簡單清潔與準備,包括轉換產品品種時的時間消耗.b.來料及零件不良造成的停頓.(SMT零件腳寬不準)c.現場監督者與檢查員臨時抽檢及⼝頭指⽰造成的偶發停頓.d.上下⼯位的傳遞中偶發問題等.以上各寬放平均取:3%.(6)特殊寬放:如管理寬放、⼩批量的寬放、獎勵寬放、機械幹擾的寬放、不同作業⼈群的寬放等,平均取:2%.和計以上可知本公司取平均寬放率為20%.以上為⼀般正常狀況之基準,如產品設計或⼯作環境等有異常時,得酌情修正.6.標準⼯時如下各⾴所⽰.6.1.1 DIP H/I段插件⼯時如下:線圈(⼆)⼆极體⾼腳⼆极體晶體(⼀)跳線晶體(⼆)ICF USE(⼀)F USE(⼆)IC線材(⼀)線材(⼀)ComponentComponentType of ComportmentMOD 數ion (Sec) 備注線圈(⼆) coil 2左⼿: M4M2G3M4R2*4P5332.6右⼿: G3M4R2*4P5M4M2⼆極體horizontal diode左⼿: M4M2G3M4R2*3P5312.4右⼿: G3M4R2*3P5M4M2 ⼆極體high lead dopde左⼿: M4M2G3M4R2*3P5R2332.6右⼿: G3M4R2*3P5R2M4M2 晶體(⼀) transistor 1左⼿: M4M2G3M4R2*3P5302.3右⼿: G3M4R2*3P5M4M2 跳線 jumper wire 左⼿:M4M2G3M4R2*3P5312.4右⼿: G3M4R2*3P5M4M2 晶體(⼆) transistor 2左⼿: M4M2G3M4R2*3P5312.4右⼿: G3M4R2*2P5R2M4M2 ICic<101eads左⼿: M4M2G3M4R2R2*2R2*2P5 332.6右⼿: G3M4R2R2*2R2*2P5M4M2 FUSE(⼀) 左⼿: M4M2G3M4R2*2P5 272.1右⼿: G3M4R2*2P5M4M2 FUSE(⼆)左⼿: M4M2G3M4R2*3P5312.4右⼿: G3M4R2*3P5M4M2ICic>101eads左⼿: M4M2G3M4R2R2*3R2*3P5 403.1右⼿: G3M4R2R2*3R2*3P5M4M2線材(⼀) 插單邊左⼿: M4M2G3M4R2P5BD29 2.2右⼿: BDM4M2G3M4R2P5線材(⼀) 插雙邊 L<20CM左⼿: M4M2G3M4R2P5M4R2P5BD 43 3.3右⼿: BDM4M2G3M4R2P5M4R2P5排線(⼀)線材(⼀)排線(⼀)排線(⼀)Soc ke t(1)Soc ke t(2)P in1P in2Slide s w itc h線材(⼆)Component ComponentType of ComportmentMOD 數ion (Sec) 備注線材(⼀) 插雙邊 L>20CM左⼿:M4M2G3M4R2P5M4M4R2P5BD47 3.6右⼿:BDM4M2G3M4R2P5M4M4R2P5 排線(⼀) 插單邊Ribbon wire2 (insert 1 ends) 左⼿: M4M2G3M4M2R2P5BD 332.6右⼿: BDM4M2G3M4M2R2P5排線(⼀) 插雙邊 Ribbon wire2(insert 2 ends) L<20CM左⼿: M4M2G3M4M2R2P5M4M2R2P5BD554.3右⼿: BDM4M2G3M4M2R2P5M4M2R2P5排線(⼀) 插雙邊 Ribbon wire2 (insert 2 ends) L>20CM左⼿: M4M2G3M4M2R2P5M4M4M2R2P5BD554.3右⼿: BDM4M2G3M4M2R2P5M4M4M2R2P5Socket(⼀)<=4way左⼿: M4M2G3M4R2*3P5302.3右⼿: G3M4R2*3P5M4M2Socket(⼆)>=5way左⼿:M4M2G3M4R2*4P5332.6右⼿: G3M4R2*4P5R2M4M2pin one pin左⼿: M4M2G3M4R2P5251.9右⼿: G3M4R2P5M4M2 端⼦solder tag左⼿:M4M2G3M4R2*2P5272.1右⼿:G3M4R2*2P5M4M2 slide switch/ detector assembly左⼿: M4M2G3M4R2*3P5312.4右⼿: G3M4R2*2P5R2M4M2CONN 4PCONN 9P -MCOP WRCO2*10P CONN 6P CONN 4PDP 2X13PDP 2X20PDP 2X2PDP 2X3PDP 2X4PComponent Shape of ComponentType of ComportmentMOD 數 ion(Sec)備注CONN-4P WAFER(L) CD-IN 連接器-4P左⼿: M4M2G3M4M2R2P529 2.2右⼿: G3M4M2R2P5M4M2 CONN-9P-MCOM1左⼿: M4M2G3M4R2*3R2*3P5372.9右⼿: G3M4R2*3R2*3R5M4M2CONN-ATX PWR POWER CONN 2X10P左⼿: M4M2G3M4R2R2*3R2*3P5 40 3.1右⼿: G3M4R2R2*3R2*3P5M4M2 CONN-CIN 6PDUAL MOUSE/KEYBOARD左⼿: M4M2G3M4R2R2*3R2*3P540 3.1右⼿: G3M4R2R2*3R2*3P5M4M2CONNECTOR4X1P左⼿:M4M2G3M4R2*4P5332.6右⼿: G3M4R2*4P5R2M4M2 DOUBLE PIN 2X13-25 FEATURE 左⼿: M4M2G3M4R2R2*3R2*3P5 403.1右⼿: G3M4R2R2*3R2*3P5M4M2 DOUBLE PIN 2X20P 左⼿: M4M2G3M4R2R2*3R2*3P5403.1右⼿: G3M4R2R2*3R2*3P5M4M2DOUBLE PIN2X2PWIE 左⼿: M4M2G3M4R2*3P5312.4右⼿: G3M4R2*3P5M4M2DOUBLE PIN2X3PBUS RATIO左⼿: M4M2G3M4R2R2*2R2*2P5332.6右⼿: G3M4R2R2*2R2*2P5M4M2DIODEDIODEType of Component Shape of Component Type of ComportmentMOD 數 Insertion(Sec) 備注ZEN DIODE左⼿: M4M2G3M4R2*4P5332.6右⼿: G3M4R2*4P5M4M2ZIP SOCKET7 321PIN左⼿: M4M2G3M4R2*3R2*3P5 37 2.9右⼿: G3M4R2*3R2*3R5M4M2現附插件時間研究⼀覽如下:插件時間研究⼀覽表插件時間研究⼀覽表6.1.2 DIP H/I段切板、上插銷及⽬檢⼯時:6.2 DIP T/U段⼀般動作標準:。
標準工時評定規則1.目的:為公平設定本公司之動作單元之時間標準,以資評估產品之標準工時及生產線人力之依據,故制定此細則.2.範圍:凡本公司之所有產品之操作員正常操作時間均適之.3.本標準工時系統採用模特排時間法(Modolar Arrangement of Predetermined Time Standard,簡稱:MOD法)4.MOD法說明:模特法的基本原理來源於大量人體工程學的試總結,歸納有以下幾個方面:(1)所有由人進行的作業,均是共通的基本動作組成的,模特法將實際生產作業中的人體動作歸納為21種.(2)不同的人做同一動作(在作業條件相同的情況下)所需時間基本相等.(3)人體不同部位的動作,所用時間值是相互成比例的,如手的動作時間是手指動作時間的2倍,小臂的動作時間是手指動作時間的3倍,由此就可以定義手指一次動作時間為人體動作的基本單位時間,同時其他動作與之成倍數關係計算求得.模特法根據人的動作級次,選擇以一個正常人的級次最低、速度最快、能量消耗最小的一次,即手指動作的時間消耗值,作為它的時間單位,即1MOD=0.129S模特法的21種動作都以手指動作一次(移動距離2.5cm)的時間消耗值為基準進行試驗、比較,來確定各動作的時間值.具體21個動作的分類及表示符號見下表:MOD法動作時間分類表由上表知,MOD法把人的動作分成上肢、下肢、其他等動作,分別由符號M、G、P、F、W……代表,符號後僅賦予數字1、2、3……代表模特時間值,如M1代表1MOD=0.129SEC,M2即代表2MOD、以此類推.5.本公司MOD法制定標準工時基準如下:(1)以MOD分析之正常時間(即100%效率水準).(2)本細則規定之標準作業距離為20CM.(3)私事寬放:因本廠採取中休制度,故寬放率為0%.(4)疲勞寬放:因本廠作業強度屬輕、中度作業,故取寬放標準為15%.(5)作業寬放:如,a.臺及場地的簡單清潔與準備,包括轉換產品品種時的時間消耗.b.來料及零件不良造成的停頓.(SMT零件腳寬不準)c.現場監督者與檢查員臨時抽檢及口頭指示造成的偶發停頓.d.上下工位的傳遞中偶發問題等.以上各寬放平均取:3%.(6)特殊寬放:如管理寬放、小批量的寬放、獎勵寬放、機械幹擾的寬放、不同作業人群的寬放等,平均取:2%.和計以上可知本公司取平均寬放率為20%.以上為一般正常狀況之基準,如產品設計或工作環境等有異常時,得酌情修正.6.標準工時如下各頁所示.6.1.1 DIP H/I段插件工時如下:線圈(二)二极體高腳二极體晶體(一)跳線晶體(二)ICF USE(一)F USE(二)IC線材(一)線材(一)Component ComponentType of ComportmentMOD 數(Sec)備注線圈(二) coil 2左手: M4M2G3M4R2*4P5332.6右手: G3M4R2*4P5M4M2二極體 horizontal diode 左手: M4M2G3M4R2*3P5312.4右手: G3M4R2*3P5M4M2二極體 high lead dopde左手: M4M2G3M4R2*3P5R2332.6右手: G3M4R2*3P5R2M4M2晶體(一) transistor 1左手: M4M2G3M4R2*3P530 2.3右手: G3M4R2*3P5M4M2 跳線 jumper wire左手:M4M2G3M4R2*3P5312.4右手: G3M4R2*3P5M4M2 晶體(二) transistor 2左手: M4M2G3M4R2*3P5312.4右手: G3M4R2*2P5R2M4M2 IC ic<101eads左手: M4M2G3M4R2R2*2R2*2P533 2.6右手: G3M4R2R2*2R2*2P5M4M2 FUSE(一)左手: M4M2G3M4R2*2P5272.1右手: G3M4R2*2P5M4M2 FUSE(二)左手: M4M2G3M4R2*3P5312.4右手: G3M4R2*3P5M4M2 IC ic>101eads左手: M4M2G3M4R2R2*3R2*3P5403.1右手: G3M4R2R2*3R2*3P5M4M2線材(一) 插單邊左手: M4M2G3M4R2P5BD29 2.2右手: BDM4M2G3M4R2P5線材(一) 插雙邊 L<20CM左手: M4M2G3M4R2P5M4R2P5BD433.3右手: BDM4M2G3M4R2P5M4R2P5排線(一)線材(一)排線(一)排線(一)Soc ke t(1)Soc ke t(2)P in1P in2Slide s w itc h 線材(二)Component ComponentType of ComportmentMOD 數(Sec)備注線材(一) 插雙邊 L>20CM左手:M4M2G3M4R2P5M4M4R2P5BD473.6右手:BDM4M2G3M4R2P5M4M4R2P5 排線(一)插單邊Ribbon wire2 (insert 1 ends)左手: M4M2G3M4M2R2P5BD332.6右手: BDM4M2G3M4M2R2P5排線(一)插雙邊Ribbon wire2 (insert 2 ends)L<20CM左手: M4M2G3M4M2R2P5M4M2R2P5BD554.3右手: BDM4M2G3M4M2R2P5M4M2R2P5排線(一) 插雙邊 Ribbon wire2 (insert 2 ends) L>20CM 左手:M4M2G3M4M2R2P5M4M4M2R2P5BD554.3右手:BDM4M2G3M4M2R2P5M4M4M2R2P5 Socket(一) <=4way左手: M4M2G3M4R2*3P5302.3右手: G3M4R2*3P5M4M2 Socket(二) >=5way左手:M4M2G3M4R2*4P5332.6右手: G3M4R2*4P5R2M4M2pin one pin 左手: M4M2G3M4R2P5251.9右手: G3M4R2P5M4M2 端子 solder tag左手:M4M2G3M4R2*2P527 2.1右手:G3M4R2*2P5M4M2 slide switch/ detector assembly左手: M4M2G3M4R2*3P5312.4右手: G3M4R2*2P5R2M4M2 線材(二)插單邊wire assembly 2 (insert ends)左手: M4M2R2G3M4(R2P5)*N*BD23+7*N1.8+0.9*N右手:G3M4(R2P5)*N*BDM4M2R2T unc rLEDT r 1T r 2Type of ComponentShape of ComponentType of ComportmentMOD 數Insertion (Sec)備注Tuncr左手: M4M2G3M4R2R2*3R2*3P540 3.1右手: G3M4R2R2*3R2*3P5M4M2 LED左手: M4M2G3M4M2R2P529 2.2右手: G3M4M2R2P5M4M2 Line Driertransformer(一)左手: M4M2G3M4R2*3P5312.4右手: G3M4R2*3P5M4M2 Transformer(二)左手: M4M2G3M4M2R2P529 2.2右手: G3M4M2R2P5M4M2CONN 4PCONN 9P -MCOP WRCO2*10PCONN 6PCONN 4P DP 2X13PDP 2X20PDP 2X2PDP 2X3PDP 2X4P ComponentComponentType of ComportmentMOD 數(Sec)備注CONN-4P WAFER(L) CD-IN 連接器-4P左手: M4M2G3M4M2R2P5292.2右手: G3M4M2R2P5M4M2 CONN-9P-MCOM1左手: M4M2G3M4R2*3R2*3P5 37 2.9右手: G3M4R2*3R2*3R5M4M2 CONN-ATX PWRPOWER CONN2X10P左手: M4M2G3M4R2R2*3R2*3P5403.1右手: G3M4R2R2*3R2*3P5M4M2CONN-CIN 6PDUALMOUSE/KEYBOARD左手: M4M2G3M4R2R2*3R2*3P5403.1右手: G3M4R2R2*3R2*3P5M4M2 CONNECTOR 4X1P左手:M4M2G3M4R2*4P5332.6右手: G3M4R2*4P5R2M4M2 DOUBLE PIN 2X13-25 FEATURE左手: M4M2G3M4R2R2*3R2*3P5403.1右手: G3M4R2R2*3R2*3P5M4M2 DOUBLE PIN2X20P左手: M4M2G3M4R2R2*3R2*3P5403.1右手: G3M4R2R2*3R2*3P5M4M2 DOUBLE PIN2X2P WIE 左手: M4M2G3M4R2*3P5312.4右手: G3M4R2*3P5M4M2DOUBLE PIN 2X3P BUS RATIO 左手: M4M2G3M4R2R2*2R2*2P5332.6右手: G3M4R2R2*2R2*2P5M4M2 DOUBLE PIN2X4PVCORE CPU CLOCK左手: M4M2G3M4R2R2*2R2*2P5332.6右手: G3M4R2R2*2R2*2P5M4M2DP 2X5PDP 2X8PEP R32PF USEHEAT SINK ACE P J5PP H2*20PP H2*5PP WRCONN12PREGSLP 2PComponentComponentType of ComportmentMOD 數(Sec)備注DOUBLE PIN2X5P左手: M4M2G3M4R2R2*2R2*2P5332.6右手: G3M4R2R2*2R2*2P5M4M2 DOUBLE PIN2X8P-14SLEEP PWRS/W左手: M4M2G3M4R2*3R2*3P5372.9右手: G3M4R2*3R2*3R5M4M2 F EPROM LCC32P左手: M4M2G3M4R2R2*3R2*3P5403.1右手: G3M4R2R2*3R2*3P5M4M2FUSE(POLY SW)1.6A 2腳左手: M4M2G3M4R2*3P5R2332.6右手: G3M4R2*3P5R2M4M2HEAT SINK ACE (有鎖螺絲)左手: M4M2G3M4R2*3R2*3P537 2.9右手: G3M4R2*3R2*3R5M4M2 PHONE JACK5P左手: M4M2G3M4R2R2*2R2*2P5332.6右手: G3M4R2R2*2R2*2P5M4M2PIN HEADER2X20P IDE 左手: M4M2G3M4R2R2*3R2*3P5403.1右手: G3M4R2R2*3R2*3P5M4M2PIN HEADER2X5P WIE 左手: M4M2G3M4R2*3R2*3P5372.9右手: G3M4R2*3R2*3R5M4M2 POWER CONN12P左手:M4M2G3M4R2*4P5332.6右手: G3M4R2*4P5R2M4M2REGULATOR左手: M4M2G3M4R2R2*2R2*2P5332.6右手: G3M4R2R2*2R2*2P5M4M2SINGLE PIN 2P左手: M4M2G3M4M2R2P529 2.2右手: G3M4M2R2P5M4M2插件時間研究一覽表插件時間研究一覽表6.1.2 DIP H/I段切板、上插銷及目檢工時:6.2 DIP T/U段一般動作標準:。