关于最短路问题算法的一点思考
- 格式:doc
- 大小:18.00 KB
- 文档页数:2
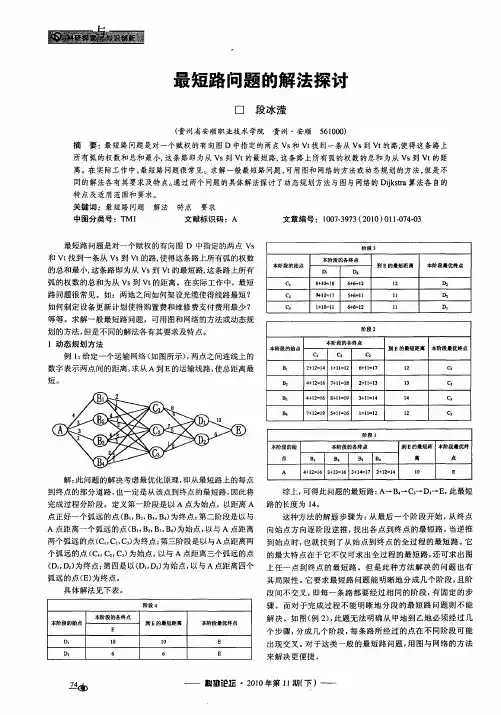
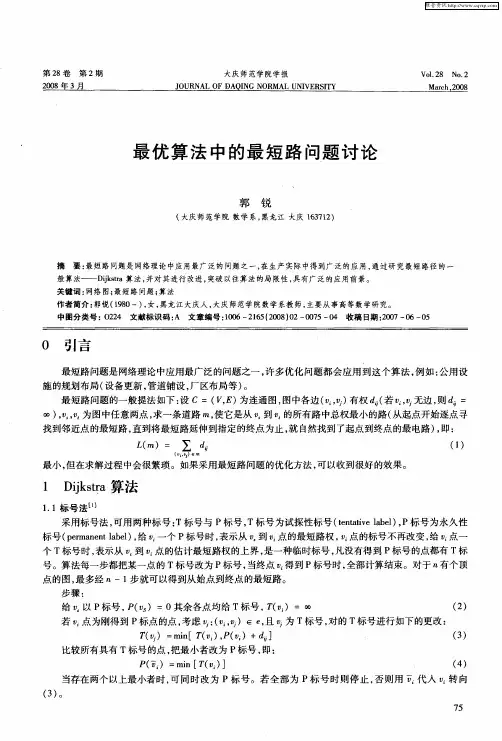
最优算法中的最短路问题讨论
最优算法是在给定的图中找到两个节点之间的最短路径的一种方法。
最短路问题是图论中的经典问题,有很多不同的算法可以解决它。
最著名且常用的最短路径算法是Dijkstra算法和A*算法。
Dijkstra算法是一种用于在带权有向图中找到从一个节点到其
他节点的最短路径的算法。
它基于贪婪算法的思想,通过不断选择当前路径中权重最小的节点来逐步构建最短路径。
Dijkstra算法适用于边权重非负的情况。
A*算法是一种更高效的最短路径算法,它结合了Dijkstra算法的贪婪策略和启发式(heuristic)函数的估计来减少搜索空间。
A*算法通过估计每个节点到目标节点的剩余距离来确定下一
步选择的节点,从而更快地找到最短路径。
A*算法适用于边
权重非负且有启发式函数可以使用的情况。
除了Dijkstra算法和A*算法之外,还有其他一些用于解决最
短路径问题的算法,如Bellman-Ford算法和Floyd-Warshall算
法等。
在选择最优算法时,需要考虑图的规模、边权重的分布、需求的时间和空间复杂度等因素。
不同算法在不同场景下的表现也会有所不同。
因此,选择最合适的最短路径算法需要综合考虑这些因素。
最短路问题的求解方法最短路问题是图论中的一个经典问题,它在很多实际应用中都有着重要的作用。
在现实生活中,我们经常需要求解最短路径,比如在地图导航、网络通信、交通运输等领域。
因此,研究最短路问题的求解方法具有重要的理论意义和实际应用价值。
在图论中,最短路问题的求解方法有很多种,其中比较经典的有Dijkstra算法、Bellman-Ford算法、Floyd-Warshall算法等。
这些算法各有特点,适用于不同的场景和要求。
下面我们就逐一介绍这些算法的原理和求解方法。
Dijkstra算法是一种用于求解单源最短路径的算法,它采用贪心策略,每次找到当前距离最短的节点进行松弛操作,直到所有节点都被遍历。
Dijkstra算法的时间复杂度为O(V^2),其中V为节点的个数。
这种算法适用于边权值为正的图,可以求解从单个源点到其他所有点的最短路径。
Bellman-Ford算法是一种用于求解单源最短路径的算法,它可以处理边权值为负的图,并且可以检测负权回路。
Bellman-Ford算法的时间复杂度为O(VE),其中V为节点的个数,E为边的个数。
这种算法适用于一般情况下的最短路径求解,但是由于其时间复杂度较高,不适用于大规模图的求解。
Floyd-Warshall算法是一种用于求解所有点对最短路径的算法,它可以处理边权值为正或负的图,但是不能检测负权回路。
Floyd-Warshall算法的时间复杂度为O(V^3),其中V为节点的个数。
这种算法适用于求解图中所有点对之间的最短路径,可以同时求解多个源点到多个目标点的最短路径。
除了上述几种经典的最短路求解算法外,还有一些其他的方法,比如A算法、SPFA算法等。
这些算法在不同的场景和要求下有着各自的优势和局限性,需要根据具体情况进行选择和应用。
在实际应用中,最短路问题的求解方法需要根据具体的场景和要求进行选择,需要综合考虑图的规模、边权值的情况、时间效率等因素。
同时,对于大规模图的求解,还需要考虑算法的优化和并行化问题,以提高求解效率。
最短路问题的求解方法最短路问题是图论中一个经典的问题,它在实际生活中有着广泛的应用,比如在交通规划、网络通信、物流配送等领域都有着重要的作用。
在解决最短路问题时,我们通常会采用不同的算法来求解,本文将介绍几种常见的最短路求解方法。
首先,我们来介绍最简单的最短路求解方法——暴力法。
暴力法的思路是枚举所有可能的路径,并找出其中的最短路。
虽然暴力法在理论上是可行的,但在实际应用中,由于其时间复杂度较高,往往不适用于大规模的图。
因此,我们需要寻找更加高效的算法来解决最短路问题。
其次,我们可以考虑使用迪杰斯特拉算法(Dijkstra algorithm)来求解最短路问题。
迪杰斯特拉算法是一种贪心算法,它通过不断地选择距离起点最近的顶点,并更新其邻居顶点的距离,来逐步求解最短路。
迪杰斯特拉算法的时间复杂度为O(V^2),其中V表示顶点的个数。
这使得它在实际应用中具有较高的效率,尤其适用于稠密图的求解。
除了迪杰斯特拉算法外,我们还可以使用弗洛伊德算法(Floydalgorithm)来解决最短路问题。
弗洛伊德算法采用动态规划的思想,通过不断更新图中任意两点之间的最短路径长度,来逐步求解整个图的最短路。
弗洛伊德算法的时间复杂度为O(V^3),因此在大规模图的求解中也具有较高的效率。
除了上述算法外,我们还可以考虑使用A算法、贝尔曼-福特算法等其他算法来解决最短路问题。
这些算法各有特点,适用于不同类型的图和不同的应用场景。
总的来说,最短路问题是一个重要且经典的问题,在实际应用中有着广泛的应用。
在求解最短路问题时,我们可以根据具体的情况选择合适的算法来求解,以提高效率和准确性。
希望本文介绍的几种最短路求解方法能够对读者有所帮助,谢谢阅读!。
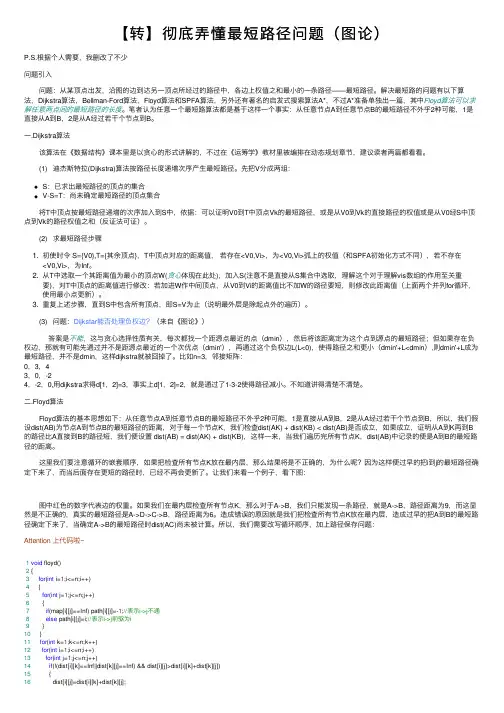
【转】彻底弄懂最短路径问题(图论)P.S.根据个⼈需要,我删改了不少问题引⼊问题:从某顶点出发,沿图的边到达另⼀顶点所经过的路径中,各边上权值之和最⼩的⼀条路径——最短路径。
解决最短路的问题有以下算法,Dijkstra算法,Bellman-Ford算法,Floyd算法和SPFA算法,另外还有著名的启发式搜索算法A*,不过A*准备单独出⼀篇,其中Floyd算法可以求解任意两点间的最短路径的长度。
笔者认为任意⼀个最短路算法都是基于这样⼀个事实:从任意节点A到任意节点B的最短路径不外乎2种可能,1是直接从A到B,2是从A经过若⼲个节点到B。
⼀.Dijkstra算法该算法在《数据结构》课本⾥是以贪⼼的形式讲解的,不过在《运筹学》教材⾥被编排在动态规划章节,建议读者两篇都看看。
(1) 迪杰斯特拉(Dijkstra)算法按路径长度递增次序产⽣最短路径。
先把V分成两组:S:已求出最短路径的顶点的集合V-S=T:尚未确定最短路径的顶点集合将T中顶点按最短路径递增的次序加⼊到S中,依据:可以证明V0到T中顶点Vk的最短路径,或是从V0到Vk的直接路径的权值或是从V0经S中顶点到Vk的路径权值之和(反证法可证)。
(2) 求最短路径步骤1. 初使时令 S={V0},T={其余顶点},T中顶点对应的距离值,若存在<V0,Vi>,为<V0,Vi>弧上的权值(和SPFA初始化⽅式不同),若不存在<V0,Vi>,为Inf。
2. 从T中选取⼀个其距离值为最⼩的顶点W(贪⼼体现在此处),加⼊S(注意不是直接从S集合中选取,理解这个对于理解vis数组的作⽤⾄关重要),对T中顶点的距离值进⾏修改:若加进W作中间顶点,从V0到Vi的距离值⽐不加W的路径要短,则修改此距离值(上⾯两个并列for循环,使⽤最⼩点更新)。
3. 重复上述步骤,直到S中包含所有顶点,即S=V为⽌(说明最外层是除起点外的遍历)。
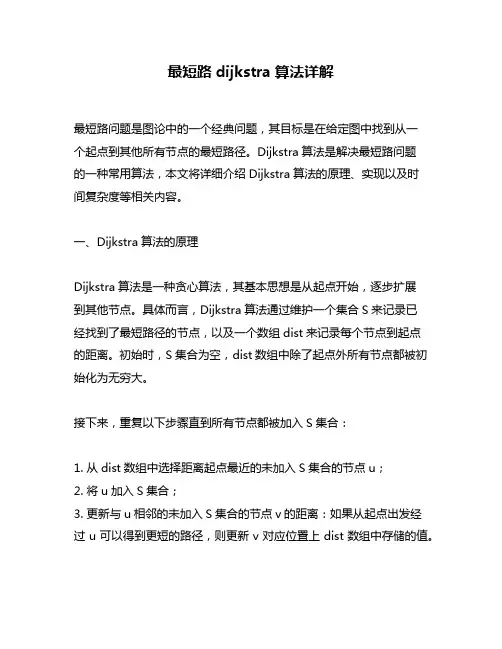
最短路dijkstra算法详解最短路问题是图论中的一个经典问题,其目标是在给定图中找到从一个起点到其他所有节点的最短路径。
Dijkstra算法是解决最短路问题的一种常用算法,本文将详细介绍Dijkstra算法的原理、实现以及时间复杂度等相关内容。
一、Dijkstra算法的原理Dijkstra算法是一种贪心算法,其基本思想是从起点开始,逐步扩展到其他节点。
具体而言,Dijkstra算法通过维护一个集合S来记录已经找到了最短路径的节点,以及一个数组dist来记录每个节点到起点的距离。
初始时,S集合为空,dist数组中除了起点外所有节点都被初始化为无穷大。
接下来,重复以下步骤直到所有节点都被加入S集合:1. 从dist数组中选择距离起点最近的未加入S集合的节点u;2. 将u加入S集合;3. 更新与u相邻的未加入S集合的节点v的距离:如果从起点出发经过u可以得到更短的路径,则更新v对应位置上dist数组中存储的值。
重复以上步骤直至所有节点都被加入S集合,并且dist数组中存储了每个节点到起点的最短距离。
最后,根据dist数组中存储的信息可以得到起点到任意节点的最短路径。
二、Dijkstra算法的实现在实现Dijkstra算法时,需要使用一个优先队列来维护未加入S集合的节点,并且每次从队列中选择距离起点最近的节点。
由于C++标准库中没有提供优先队列,因此需要手动实现或者使用第三方库。
以下是一个基于STL堆实现的Dijkstra算法代码示例:```c++#include <iostream>#include <vector>#include <queue>using namespace std;const int INF = 0x3f3f3f3f;vector<pair<int, int>> adj[10001];int dist[10001];void dijkstra(int start) {priority_queue<pair<int, int>, vector<pair<int, int>>, greater<pair<int, int>>> pq;pq.push(make_pair(0, start));dist[start] = 0;while (!pq.empty()) {int u = pq.top().second;pq.pop();for (auto v : adj[u]) {if (dist[u] + v.second < dist[v.first]) {dist[v.first] = dist[u] + v.second;pq.push(make_pair(dist[v.first], v.first));}}}}int main() {int n, m, start;cin >> n >> m >> start;for (int i = 1; i <= n; i++) {dist[i] = INF;}for (int i = 1; i <= m; i++) {int u, v, w;cin >> u >> v >> w;adj[u].push_back(make_pair(v, w));}dijkstra(start);for (int i = 1; i <= n; i++) {if (dist[i] == INF) {cout << "INF" << endl;} else {cout << dist[i] << endl;}}return 0;}```以上代码中,adj数组用于存储图的邻接表,dist数组用于存储每个节点到起点的最短距离。
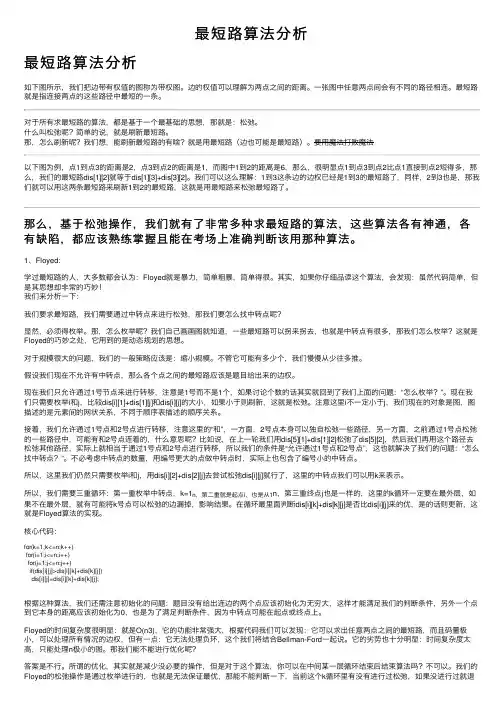
最短路算法分析最短路算法分析如下图所⽰,我们把边带有权值的图称为带权图。
边的权值可以理解为两点之间的距离。
⼀张图中任意两点间会有不同的路径相连。
最短路就是指连接两点的这些路径中最短的⼀条。
对于所有求最短路的算法,都是基于⼀个最基础的思想,那就是:松弛。
什么叫松弛呢?简单的说,就是刷新最短路。
那,怎么刷新呢?我们想,能刷新最短路的有啥?就是⽤最短路(边也可能是最短路)。
要⽤魔法打败魔法以下图为例,点1到点3的距离是2,点3到点2的距离是1,⽽图中1到2的距离是6,那么,很明显点1到点3到点2⽐点1直接到点2短得多,那么,我们的最短路dis[1][2]就等于dis[1][3]+dis[3][2]。
我们可以这么理解:1到3这条边的边权已经是1到3的最短路了,同样,2到3也是,那我们就可以⽤这两条最短路来刷新1到2的最短路,这就是⽤最短路来松弛最短路了。
那么,基于松弛操作,我们就有了⾮常多种求最短路的算法,这些算法各有神通,各有缺陷,都应该熟练掌握且能在考场上准确判断该⽤那种算法。
1、Floyed:学过最短路的⼈,⼤多数都会认为:Floyed就是暴⼒,简单粗暴,简单得很。
其实,如果你仔细品读这个算法,会发现:虽然代码简单,但是其思想却⾮常的巧妙!我们来分析⼀下:我们要求最短路,我们需要通过中转点来进⾏松弛,那我们要怎么找中转点呢?显然,必须得枚举。
那,怎么枚举呢?我们⾃⼰画画图就知道,⼀些最短路可以拐来拐去,也就是中转点有很多,那我们怎么枚举?这就是Floyed的巧妙之处,它⽤到的是动态规划的思想。
对于规模很⼤的问题,我们的⼀般策略应该是:缩⼩规模。
不管它可能有多少个,我们慢慢从少往多推。
假设我们现在不允许有中转点,那么各个点之间的最短路应该是题⽬给出来的边权。
现在我们只允许通过1号节点来进⾏转移,注意是1号⽽不是1个,如果讨论个数的话其实就回到了我们上⾯的问题:“怎么枚举?”。
现在我们只需要枚举i和j,⽐较dis[i][1]+dis[1][j]和dis[i][j]的⼤⼩,如果⼩于则刷新,这就是松弛。
单源最短路算法范文1. Dijkstra算法Dijkstra算法,是由荷兰计算机科学家Edsger W. Dijkstra于1956年提出的一种解决单源最短路径问题的算法。
该算法运用了贪心思想,即每次选择当前最短路径的顶点作为中间点,不断更新各个顶点的最短路径长度。
算法步骤如下:1)将起点到所有其他顶点的最短路径长度初始化为无穷大,将起点到自身的最短路径长度设为0。
2)选取起点作为当前顶点。
3)更新当前顶点到所有相邻顶点的最短路径长度。
若当前顶点到一些相邻顶点的路径长度更短,则更新该最短路径长度。
4)选择当前最短路径长度中最小的顶点,并将其作为新的当前顶点。
5)重复步骤3和步骤4,直到所有顶点的最短路径长度被确定。
Dijkstra算法的时间复杂度为O(V^2),其中V是顶点数。
该算法相对简单,适用于有向无环图以及所有边的权重非负的情况。
2. Bellman-Ford算法Bellman-Ford算法,是由美国计算机科学家Richard Bellman和杰出的计算机科学家Leslie Ford于1958年提出的一种解决单源最短路径问题的算法。
该算法运用了动态规划的思想,通过对所有边进行,V,-1轮松弛操作来逐步逼近最短路径。
算法步骤如下:1)将起点到所有其他顶点的最短路径长度初始化为无穷大,将起点到自身的最短路径长度设为0。
2)重复进行,V,-1轮松弛操作,其中,V,是顶点数。
3)在每一轮松弛操作中,遍历所有边,对每条边(u,v)进行松弛操作:若当前顶点u到起点的最短路径长度加上(u,v)的权重小于顶点v的最短路径长度,则更新顶点v的最短路径长度。
4)最后,检查图中是否存在负环路。
若在,V,-1轮松弛操作之后,仍然有顶点的最短路径长度能够被更新,则说明图中存在负环路。
Bellman-Ford算法的时间复杂度为O(VE),其中V是顶点数,E是边数。
相较于Dijkstra算法,Bellman-Ford算法可以处理存在负边权以及存在负环路的情况。
掌握最短路算法的要点最短路算法是图论中的一个重要概念,其应用广泛且具有实际意义。
无论是在计算机科学还是数据分析领域,掌握最短路算法的要点都是非常重要的。
本文将详细介绍最短路算法的概念、应用以及其要点。
一、最短路算法概述最短路算法是用来求解图中两点之间最短路径问题的算法。
该算法考虑了图中各点之间的边权重,通过比较路径的权重来确定最短路径。
最常用的最短路算法有迪杰斯特拉算法和弗洛伊德算法。
迪杰斯特拉算法是一种单源最短路径算法,用于求解一个节点到其他所有节点之间的最短路径。
它通过不断选择未访问节点中权重最小的节点来更新节点之间的距离。
弗洛伊德算法是一种多源最短路径算法,用于求解图中任意两点之间的最短路径。
它通过动态规划的方式逐步更新节点之间的距离。
弗洛伊德算法适用于解决稠密图中的最短路径问题。
二、最短路算法应用最短路算法有着广泛的应用。
下面将介绍几个常见的应用场景。
1. 网络路由在计算机网络中,最短路算法被广泛应用于路由器的路径选择。
路由器根据最短路算法计算出数据包传输的最优路径,以提高网络传输效率和速度。
2. 交通规划最短路算法在交通规划中也有着重要的应用。
比如,在GPS导航系统中,通过最短路算法可以计算出车辆行驶的最短路径,帮助司机选择最快的道路。
3. 电力系统规划在电力系统规划中,最短路算法可以用于计算电力传输的最短路径,以确保电力系统的可靠性和高效性。
通过最短路算法可以优化电力线路的配置和布置。
三、最短路算法要点要想熟练掌握最短路算法,需要注意以下几个要点。
1. 图的表示在实现最短路算法之前,需要先清楚如何表示图。
常见的图表示方法有邻接矩阵和邻接表。
邻接矩阵适用于稠密图,而邻接表适用于稀疏图。
2. 权重的定义在最短路算法中,边的权重是一个重要的因素。
不同的应用场景可能对权重有不同的定义。
比如,在交通规划中,权重可以表示为路径的时间或者距离。
在电力系统规划中,权重可以表示为电力线路的传输损耗。
3. 路径选择策略最短路算法的核心在于选择路径的策略。
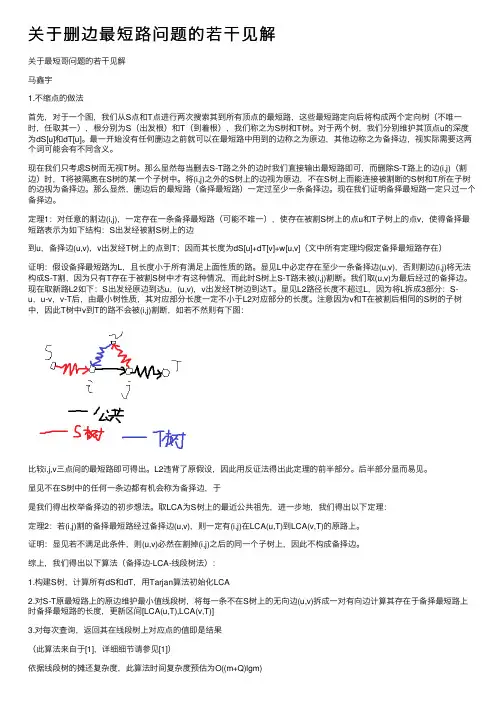
关于删边最短路问题的若⼲见解关于最短哥问题的若⼲见解马鑫宇1.不缩点的做法⾸先,对于⼀个图,我们从S点和T点进⾏两次搜索其到所有顶点的最短路,这些最短路定向后将构成两个定向树(不唯⼀时,任取其⼀),根分别为S(出发根)和T(到着根),我们称之为S树和T树。
对于两个树,我们分别维护其顶点u的深度为dS[u]和dT[u]。
最⼀开始没有任何删边之前就可以在最短路中⽤到的边称之为原边,其他边称之为备择边,视实际需要这两个词可能会有不同含义。
现在我们只考虑S树⽽⽆视T树。
那么显然每当删去S-T路之外的边时我们直接输出最短路即可,⽽删除S-T路上的边(i,j)(割边)时,T将被隔离在S树的某⼀个⼦树中。
将(i,j)之外的S树上的边视为原边,不在S树上⽽能连接被割断的S树和T所在⼦树的边视为备择边。
那么显然,删边后的最短路(备择最短路)⼀定过⾄少⼀条备择边。
现在我们证明备择最短路⼀定只过⼀个备择边。
定理1:对任意的割边(i,j),⼀定存在⼀条备择最短路(可能不唯⼀),使存在被割S树上的点u和T⼦树上的点v,使得备择最短路表⽰为如下结构:S出发经被割S树上的边到u,备择边(u,v),v出发经T树上的点到T;因⽽其长度为dS[u]+dT[v]+w[u,v](⽂中所有定理均假定备择最短路存在)证明:假设备择最短路为L,且长度⼩于所有满⾜上⾯性质的路。
显见L中必定存在⾄少⼀条备择边(u,v),否则割边(i,j)将⽆法构成S-T割,因为只有T存在于被割S树中才有这种情况,⽽此时S树上S-T路未被(i,j)割断。
我们取(u,v)为最后经过的备择边。
现在取新路L2如下:S出发经原边到达u,(u,v),v出发经T树边到达T。
显见L2路径长度不超过L,因为将L拆成3部分:S-u,u-v,v-T后,由最⼩树性质,其对应部分长度⼀定不⼩于L2对应部分的长度。
注意因为v和T在被割后相同的S树的⼦树中,因此T树中v到T的路不会被(i,j)割断,如若不然则有下图:⽐较i,j,v三点间的最短路即可得出。
浅谈图论(⼀)——最短路问题图论〔Graph Theory〕是数学的⼀个分⽀。
它以图为研究对象。
图论中的图是由若⼲给定的点及连接两点的线所构成的图形,这种图形通常⽤来描述某些事物之间的某种特定关系,⽤点代表事物,⽤连接两点的线表⽰相应两个事物间具有这种关系。
(摘⾃百度百科)1.Floyd 弗洛伊德算法这种算法解决的是多源最短路问题(求任意两点之间的最短路径)若我们⽤⼆维数组e[i][j]表⽰点i到点j当前的最短距离(程序运⾏完后数组中存的就是真正的最短距离)那么我们可以⽤e[i][j]=max(e[i][j],e[i][k],e[j][k]);来更新e数组。
也就是⽐较从i到j 和从i到k+从k到j 的距离重点来啦核⼼思想:能否找到第三点使得任意两点的距离变短,即能否找到 i->k->j ⽐ i->j 短,如果能找到,就更新。
下⾯呈上代码://多元最短路 Floyd O(n^3)#include<iostream>#include<cstdlib>#include<cstdio>#include<cstring>#include<algorithm>#include<cmath>using namespace std;const int maxn=99999999;int n,m,e[1005][1005];int main(){int i,j,k,a,b,c;scanf("%d%d",&n,&m);for(i=1;i<=n;i++){for(j=1;j<=n;j++){if(i==j) e[i][j];else e[i][j]=maxn;}}for(i=1;i<=m;i++){scanf("%d%d%d",&a,&b,&c);e[a][b]=c;}//Floyd核⼼部分for(i=1;i<=n;i++)for(j=1;j<=n;j++)for(k=1;k<=n;k++)if(e[j][k]>e[j][i]+e[i][k])e[j][k]=e[j][i]+e[i][k];for(i=1;i<=n;i++){for(j=1;j<=n;j++)printf("%d ",e[i][j]);printf("\n");}return0;}Floyd很容易发现Floyd算法的时间复杂度是O(N^3)。
最短路问题之Dijkstra算法题⽬: 在上⼀篇博客的基础上,这是另⼀种⽅法求最短路径的问题。
Dijkstra(迪杰斯特拉)算法:找到最短距离已经确定的点,从它出发更新相邻顶点的最短距离。
此后不再关⼼前⾯已经确定的“最短距离已经确定的点”。
Dijkstra算法采⽤的是⼀种贪⼼的策略,声明⼀个数组dis来保存源点到各个顶点的最短距离和⼀个保存已经找到了最短路径的顶点的集合:T,初始时,原点 s 的路径权重被赋为 0 (dis[s] = 0)。
若对于顶点 s 存在能直接到达的边(s,m),则把dis[m]设为w(s, m),同时把所有其他(s不能直接到达的)顶点的路径长度设为⽆穷⼤。
初始时,集合T只有顶点s。
然后,从dis数组选择最⼩值,则该值就是源点s到该值对应的顶点的最短路径,并且把该点加⼊到T中,OK,此时完成⼀个顶点,然后,我们需要看看新加⼊的顶点是否可以到达其他顶点并且看看通过该顶点到达其他点的路径长度是否⽐源点直接到达短,如果是,那么就替换这些顶点在dis中的值。
然后,⼜从dis中找出最⼩值,重复上述动作,直到T中包含了图的所有顶点。
代码:1import java.util.HashSet;2import java.util.Set;34public class图的最短路问题_Dijkstra {5public static void main(String[] args) {6int s = 1;7int[] shortestPath = shortestPath(s);89for (int i = 0; i < prev.length; i++) {10 System.out.println((char) ('A' + s) + "到" + (char) ('A' + i) + "的路径");11 System.out.print((char) ('A' + i) + "<-");12int j = prev[i];13while (j != s) {14 System.out.print((char) ('A' + j) + "<-");15 j = prev[j];16 }17 System.out.print((char) ('A' + j));18 System.out.println(":" + shortestPath[i]);19 }20 }2122static int[] prev;2324/**25 * 求起点到各顶点的最短距离26 *27 * @param s 起点28 * @return29*/30private static int[] shortestPath(int s) {31// 顶点个数32int n = graph.length;33// 记录每个点的前驱34 prev = new int[n];35// ⼀定要初始化,源点的前驱是⾃⾝36 prev[s] = s;37// 记录s到各顶点的最短距离38int[] d = new int[n];39 d[s] = 0;// ⾃⼰到⾃⼰的距离为040// 记录已经找到最短距离的顶点41 Set<Integer> T = new HashSet<>();42 T.add(s);4344/*-第⼀步:直接可达的顶点,⽤距离来初始化d,d[s]=0,可直达的把距离记录下来作为待定值-*/45for (int i = 0; i < n; i++) {46if (i != s && graph[s][i] == 0)47 d[i] = Integer.MAX_VALUE;// 不可直达的顶点,先以最⼤整数作为待定值48if (i != s && graph[s][i] > 0) {49 d[i] = graph[s][i]; // 可直达的顶点,以直达距离作为待定值50 prev[i] = s; // 可直达的顶点,其前驱是源点51 }52 }53// Util.print(d);5455while (T.size() < n) {56/*-第⼆步:从待定的距离表中找到最⼩值,这个值可以作为确定值,为什么?-*/57int min = minIndex(d, T);58 T.add(min);59if (T.size() == n)60break;61/*-第三步,看这个新确定的顶点的出度,看看从源点出发是经过这个顶点到其邻居近还是直达更近,如果更近就要更新-*/ 62// 扫描index的邻居63for (int neighbor = 0; neighbor < n; neighbor++) {64int cost = graph[min][neighbor];65// 更新66if (cost > 0 && d[neighbor] > d[min] + cost) {67 d[neighbor] = d[min] + cost;68 prev[neighbor] = min; // 更新最短路后,要更新i这个点的前驱69 }70 }71 }72return d;73 }7475/**76 * 从未确定的点⾥⾯找⼀个最⼩的77 *78 * @param d79 * @param t 已确定了最短距离的顶点集80 * @return81*/82private static int minIndex(int[] d, Set<Integer> t) {83int index = -1;84int min = Integer.MAX_VALUE;85for (int i = 0; i < d.length; i++) {86if (!t.contains(i) && d[i] < min) {87 min = d[i];88 index = i;89 }90 }91return index;92 }9394static int[][] graph = {95 { 0, 2, 5, 0, 0, 0, 0 },96 { 2, 0, 4, 6, 10, 0, 0 },97 { 5, 4, 0, 2, 0, 0, 0 },98 { 0, 6, 2, 0, 0, 1, 0 },99 { 0, 10, 0, 0, 0, 3, 5 },100 { 0, 0, 0, 1, 3, 0, 9 },101 { 0, 0, 0, 0, 5, 9, 0 }102 };103 }结果: 例题,POJ-1502。
最短路问题的启发式搜索算法最短路问题是指在带权重的有向图或无向图中,寻找从一个顶点到另一个顶点的最短路径。
启发式搜索算法是一种利用启发信息来指导搜索的方法。
本文将介绍两种常用的启发式搜索算法——Dijkstra算法和A*算法。
一、Dijkstra算法Dijkstra算法是一种经典的最短路算法,它适用于无负权边的有向图或无向图。
下面是Dijkstra算法的伪代码:1. 初始化距离数组dist,将起始顶点的距离初始化为0,其他顶点距离初始化为正无穷。
2. 创建一个空的优先队列Q,并将起始顶点入队。
3. 当队列不为空时,执行以下步骤:- 出队一个顶点u。
- 遍历u的所有邻接顶点v,如果从起始顶点到v的距离dist[u]加上u到v的边权重小于dist[v],则更新dist[v]的值,将v入队。
4. 当队列为空时,算法结束。
Dijkstra算法的核心思想是通过不断更新起始顶点到其他顶点的距离值,直到找到最短路径。
该算法保证了每次从队列中取出的顶点都是到起始顶点距离最短的顶点,因此可以得到最短路径。
二、A*算法A*算法是一种常用的启发式搜索算法,它适用于带有启发信息的有向图或无向图。
下面是A*算法的伪代码:1. 初始化起始顶点的估计距离值为0。
2. 创建一个空的优先队列Q,并将起始顶点入队,估计距离值作为优先级。
3. 当队列不为空时,执行以下步骤:- 出队一个顶点u。
- 如果u是目标顶点,则算法结束。
- 遍历u的所有邻接顶点v,计算从起始顶点到v的实际距离和估计距离之和f.- 如果f小于v的估计距离值,则更新v的估计距离值为f,并将v入队。
4. 当队列为空时,算法结束。
A*算法的核心思想是通过启发式估计函数,将优先级队列中的顶点按照估计距离值进行排序。
其中,估计距离值等于实际距离值加上启发式函数给出的估计值。
通过这种方式,A*算法可以在保证搜索效率的同时,找到最短路径。
结语最短路问题的启发式搜索算法为解决最短路径提供了有效的方法。
两类经典算法求最短路问题剖析1.引言众所周知,最短路算法有两种基本算法,一是指定的顶点之间的最短路径算法,二是所有顶点之间的最短路算法,其中所有顶点间最短路算法更具有代表性。
目前,求最短路问题的方法很多,各有优劣性,而实际应用中以两类经典算法居多,分别是1959年E.W.Dijkstra提出的Dijkstra算法和1962年Floyd提出的Floyd算法。
1.1 Dijkstra算法Dijkstra算法的基本思想是:若起点vs到终点vt的最短路经过点v1,v2,v3,则v1到vt的最短路是p1t={v1,v2,v3,vt},v2到vt的最短路是p2t={v2,v3,vt},v3到vt的最短路是p3t={v3,vt},Dijkstra算法是在图上进行一种标号迭代的过程。
不妨设弧(i,j)的长度为cij≥0,vi到vj的最短路记为pij,最短路长记为Lij。
Dijkstra算法的基本步骤如下[1-2]:(1)找出所有起点vi已标号,终点vj未标号的弧,集合为B={(i,j)vi已标号;vj未标号},如果这样的弧不存在或已标号则计算结束。
(2)计算集合B中弧的标号:k(i,j)=b(i)+cij。
(3)b(l)=minj{k(i,j)|(i,j)∈B},在弧的终点vl标号b(l),返回步骤(1)。
完成步骤(1)~(3)为一轮计算,每一轮计算至少得到一个点的标号,最多通过n轮计算得到最短路。
1.2 Floyd算法Floyd算法是一种矩阵迭代方法,也是一种表格迭代方法,对于求任意点间最短路、混合图的最短路、有负权图的最短路等一般网络问题来说是比较有效的,Floyd算法的基本步骤如下[1-2]:(1)写出vi一步到达vj的距离矩阵L1=(L(1)ij),L1也是一步到达的最短距离矩阵。
如果vi 与vj之间没有关联,则令cij=+∞。
(2)计算两步最短矩阵。
设vi到vj经过一个中心点vr,要两步到达vj,则vi到vj的最短距离为L(2)ij=minr{cir+crj},最短距离矩阵为L2=(L(2)ij)。
最短路问题的求解方法最短路问题是图论中的一个经典问题,它在现实生活中有着广泛的应用。
在很多实际情况下,我们需要找到两个节点之间的最短路径,以便在最短时间内到达目的地或者以最小的成本进行运输。
因此,求解最短路问题具有重要的意义。
在图论中,最短路问题可以分为单源最短路和多源最短路两种情况。
单源最短路指的是从图中的一个固定节点出发,到达其他所有节点的最短路径;而多源最短路则是求解图中任意两个节点之间的最短路径。
针对这两种情况,我们可以采用不同的算法来求解最短路问题。
其中,最著名的算法包括Dijkstra算法和Floyd-Warshall算法。
Dijkstra算法适用于单源最短路问题,它采用贪心策略,逐步确定从源节点到其他节点的最短路径。
而Floyd-Warshall算法则适用于多源最短路问题,它通过动态规划的方式,计算图中任意两个节点之间的最短路径。
除了这两种经典算法外,还有一些其他方法可以用来求解最短路问题,比如Bellman-Ford算法和SPFA算法。
这些算法各有特点,适用于不同的场景,可以根据具体情况选择合适的算法来解决最短路问题。
在实际应用中,最短路问题常常涉及到大规模的图和复杂的网络结构,因此算法的效率和性能也是非常重要的考量因素。
为了提高算法的求解速度,可以采用一些优化手段,比如使用堆优化的Dijkstra算法、矩阵快速幂优化的Floyd-Warshall算法等。
总之,最短路问题是图论中的一个重要问题,它在实际生活中有着广泛的应用。
通过合理选择算法和优化方法,我们可以高效地求解最短路问题,为实际应用提供有力的支持。
希望本文能够为读者对最短路问题的求解方法有所启发,也希望在未来的实际应用中能够发挥一定的作用。
【模板】最短路题解最短路算法是图论中比较重要的算法之一,它可以解决许多实际问题。
本文将围绕“【模板】最短路题解”展开讲解,以帮助读者更好地理解和掌握这个算法。
第一步:问题的定义最短路问题是指从起点到终点,找出一条路径,使得该路径上的所有边的边权之和最小。
求最短路径的算法有很多,其中最常用的是Dijkstra算法、Bellman-Ford算法和Floyd算法。
第二步:Dijkstra算法Dijkstra算法是一种贪心算法,用于求从一个节点出发到其它所有节点的最短路径。
它的具体实现过程如下:1. 初始化:设起点s到所有顶点的距离为无穷大,s到自身的距离为0。
2. 对所有边进行松弛操作:从起点开始,对相邻的顶点进行松弛操作,即如果从起点到相邻顶点的距离比之前的短,则更新顶点的最短距离。
3. 选取距离最小的顶点:从尚未确定最短路径的顶点中,选择距离起点最近的顶点(记作u),作为下一个中间点,对u进行松弛操作。
4. 循环:重复步骤2和步骤3,直到所有顶点的最短路径都已确定。
第三步:Bellman-Ford算法Bellman-Ford算法可以处理存在负权边的最短路问题,其步骤如下:1. 初始化:设源点s到所有其它顶点的距离为无穷大,s到自身的距离为0。
2. 进行松弛操作:对所有边进行n-1轮松弛操作(n为节点数),即从起点开始,对相邻的顶点进行松弛操作,如果从起点到相邻顶点的距离比之前的短,则更新顶点的最短距离。
3. 检测负环:如果在第n-1轮松弛操作后,仍然存在顶点的距离可以缩短,则说明存在负环。
第四步:Floyd算法Floyd算法是一种动态规划方法,它可以求解所有点对之间的最短路径。
其步骤如下:1. 初始化:设顶点i到顶点j的距离为矩阵D[i][j],如果存在边(i,j),则有D[i][j]=w(i,j),否则D[i][j]=∞。
2. 状态转移:对于每一对顶点(i,j),枚举中间点k,若D[i][k]+D[k][j]<D[i][j],则更新D[i][j]=D[i][k]+D[k][j]。
关于最短路问题算法的一点思考
最短路问题,实际上是P95。
也就是我们用一个算法解决SP问题时,就是在找这个加权图G中从s到t的P(s,t)中边权之和最小的P*(s,t).
由定义就可以看出,实际生活中经常有最短路问题的例子。
例如:
实例1.某公司在六个城市s,t,a,b都有分公司,公司成员经常往来于它们之间,已知从Vi到Vj的直达航班票价由下述矩阵的第i行,第j列元素给出(∞表示无直达航班),该公司想算出一张任意两个城市之间的最廉价路线航费表。
图+矩阵
实例2.如图的交通网络,每条弧上的数字代表车辆在该路段行驶所需的时间,有向边表示单行道。
若有一批货物要从s号顶点运往t号顶点,问运货车应沿哪条线路行驶,才能最快地到达目的地?
图+矩阵
因此怎么样快速又精确的求解一个最短路问题就显得至关重要。
下面我们来介绍几种解决SP问题的有效途径。
一、把求最短路问题转化为LP问题
P95
二、最短路问题的原始对偶算法:Dijkstra算法
Pdf最短路+课本P138
综上,即为Dijkstra算法,它的有效实施体现在:P161
对Dijkstra算法的一点思考:
1.关于Dijkstra算法,书中的例子定义了一个使用范围,即寻求有向图中,从一固定顶点到其余各点的最短路径。
那么一个简单的推广就是在于,对于无向图或者混合图的情况Dijkstra算法还能否使用?答案应该是肯定的。
也就是说,实例2中无论是单行道,双行道的情况都是可以应用Dijkstra算法进行求解的。
2. 作为学习图论的一名学生,Dijkstra算法的本质可以说就是在一个图中,进行标号,每次迭代产生一个永久标号, 从而生长一颗以s为根的最短路树,在这颗树上每个顶点与根s 节点之间的路径皆为最短路径.
3.Dijkstra算法明确要求权(费用)非负,这无疑会限制一些是实际生活中的例子进行求解,若出现的边权为负的情况,Dijkstra算法就要进行修改。
并且,如果我们对Dijkstra算法进行编程,即使根据书中拟Algol语言的提示以我现有的水平也根本写不出Matlab的高级程序语言。
但是有另外一种算法有效的避免了这个麻烦,它的逻辑更为简单,并允许网络中的弧有负权,能探测网络中负费用圈,与一般的原始对偶算法不同。
三、Floyd-Warshall算法
P164
并且,有一点比较吸引我的地方是在于Floyd-Warshall算法的逻辑较为简单,我可以跟据课本上拟Algol语言,编写出一部分Matlab的程序,但是因为编译程序的水平的限制,每次运行的时候都会出现不同的错误。
在与计算数学的同学进行讨论的时候,因为他们偏重绘图而我们偏重优化,导致也为得出有效的解决措施。
Input:A表示图G的带弧权邻接矩阵;
Output:矩阵D, path,及i与j之间的最短距离min和最短路径path.
function [min,path]=floyd(A,start,terminal) %返回i与j之间的最短距离min和最短路径path. D=A;n=size(D,1);path=zeros(n,n); %D表示矩阵,n表示D矩阵的行数;if
min=D(start,terminal);
min(1)=start;
i=1;
i=i+1;
for i=1:n %子循环;
for j=1:n
if D(i,j)~=inf %D(i,j)不等于无穷
path(i,j)=j;
end
end
end
for k=1:n
for i=1:n
for j=1:n
if D(i,k)+D(k,j)<D(i,j) %D(i,j)表示i到j的最短距离;
D(i,j)=D(i,k)+D(k,j);
path(i,j)=path(i,k); %path(i,j)表示i与j之间的最短路径上顶点i的后继点;
end
end
end
end
path=[ ]; % 返回矩阵D, path
end
建立m文件如下:
A= [ 0,50,inf,40,25,10;50,0,15,20,inf,25;inf,15,0,10,20,inf;…];
[D, path]=floyd(A)
运行后输出显示存在error。