Dijkstra最短路径算法的优化和改进
- 格式:doc
- 大小:1.94 MB
- 文档页数:38
Dijkstra最短路径算法的实现及优化 施培港 厦门信息港建设发展股份有限公司 厦门市槟榔路1号联谊广场五层 361004 Email:spg@xminfoport.com 摘要:最短路径算法种类繁多,比较有名的算法包括:Dijkstra算法、Ford算法、Floyd算法、Moore算法、A*算法、K值算法,而即使同一种算法也有多种不同的实现方式。
本文就Dijkstra算法的两种实现方式做一定的分析,并采用一种新的实现方法达到对算法优化的目的。
关键字:Dijkstra算法 最短路径 网络分析 地理信息系统(GIS) 1. 何谓最短路径 所谓最短路径就是网络中两点之间距离最短的路径,这里讲的距离可以是实际的距离,也可以引申为其它的度量,如时间、运费、流量等。
因此,从广义上讲,最短路径算法就是指从网络中找出两个点之间最小阻抗路径的算法。
2. Dijkstra算法介绍 Dijkstra算法本身是一种贪婪算法,它通过分步的方法来求最短路径。
首先,初始产生源点到它自身的路径,其长度为零,然后在贪婪算法的每一步中,产生一个到达新的目的顶点的最短路径。
其算法描述如下(算法中以有向图表示网络结构): 对于有向图G =(V,E),图中有n个顶点,有e条弧,其中V为顶点的集合,E为弧的集合,求源点VS到终点VT的最短路径。
(1) 用带权的邻接矩阵L来表示有向图,L(X,Y)表示弧<X,Y>的权值,若弧<X,Y>不存在,则设L(X,Y)=∞;用D(X)表示源点VS到顶点X的距离,除源点VS的值为0外,其余各点设为∞;用S表示已找到的从源点VS出发的最短路径的顶点的集合,其初始状态为空集;用V-S表示未找到最短路径的顶点的集合; (2) 选择源点VS做标记,令Y = VS,S = S ∪ {VS}; (3) 对于V-S中各顶点, 若D(X) > D(Y) + L(Y,X),则修改D(X)为 D(X) = D(Y) + L(Y,X) 其中Y是己确定作标记的点; (4) 选择Vj,使得D(j) = min{ D(i) | Vi ∈ V-S } 若D(j)为∞,则说明VS到V-S中各顶点都没有通路,算法终止;否则,Vj就是当前求得的一条从源点VS出发的最短路径的终点,对Vj做标记,令Y = Vj,并把Vj放入集合S中,即令S = S ∪ {Vj}; (5) 如果Y等于VT,则说明已经找到从VS到VT的最短路径,算法终止;否则,转到3继续执行。
最短路径问题的优化算法最短路径问题是计算网络中两个节点之间最短路径的一个经典问题。
在许多实际应用中,如导航系统、交通规划和物流管理等领域,寻找最短路径是一个重要的任务。
然而,当网络规模较大时,传统的最短路径算法可能会面临计算时间长、耗费大量内存等问题。
为了解决这些问题,研究人员提出了许多优化算法,以提高最短路径问题的计算效率。
一、Dijkstra算法的优化Dijkstra算法是最短路径问题中最经典的解法之一,但当网络中的节点数量较大时,其计算时间会显著增加。
为了优化Dijkstra算法,研究者提出了以下几种改进方法:1. 堆优化Dijkstra算法中最耗时的操作是从未访问节点中选取最短路径的节点。
传统的实现方式是通过线性搜索来选择下一个节点,时间复杂度为O(N),其中N是节点的数量。
而使用堆数据结构可以将时间复杂度降低到O(lgN),从而提高算法的效率。
2. 双向Dijkstra算法双向Dijkstra算法是通过同时从起点和终点开始搜索,以减少搜索的范围和时间。
在搜索过程中,两个搜索方向逐渐靠近,直到找到最短路径为止。
双向Dijkstra算法相比传统的Dijkstra算法能够减少搜索空间,因此在网络规模较大时可以提供更快的计算速度。
二、A*算法A*算法是一种启发式搜索算法,常用于解决最短路径问题。
与传统的Dijkstra算法不同,A*算法通过引入启发函数来优先搜索距离终点较近的节点。
启发函数的选择对算法的效率有重要影响,一般需要满足启发函数低估距离的性质。
A*算法的时间复杂度取决于启发函数,如果启发函数选择得恰当,可以在大规模网络中快速找到最短路径。
三、Contraction Hierarchies算法Contraction Hierarchies(CH)算法是近年来提出的一种高效解决最短路径问题的方法。
CH算法通过预处理网络,将网络中的节点进行合并,形成层次结构。
在查询最短路径时,只需在层次结构上进行搜索,大大减少了计算复杂度。
无人机航迹规划中的路径规划算法比较与优化无人机(Unmanned Aerial Vehicle,简称无人机)作为近年来飞行器技术的重要突破之一,在航空航天、军事、农业、物流等领域发挥着重要作用。
在无人机的飞行控制中,路径规划算法的选择至关重要,它决定了无人机的飞行轨迹,直接影响着无人机飞行的效率和安全性。
本文将对几种常见的无人机路径规划算法进行比较与优化分析。
1. 最短路径算法最短路径算法是无人机航迹规划中最常用的算法之一。
其中,迪杰斯特拉(Dijkstra)算法和A*算法是两种主要的最短路径算法。
迪杰斯特拉算法是一种基于广度优先搜索的算法,通过不断更新每个节点的最短路径长度,最终确定无人机飞行的最短路径。
A*算法在迪杰斯特拉算法的基础上加入了启发式函数,能够更加准确地估计路径的代价。
2. 遗传算法遗传算法是一种模拟自然界进化过程的优化算法。
它通过对候选路径进行遗传操作(如选择、交叉、变异等),通过适应度函数对路径进行评估,最终得到适应度最高的最优路径。
遗传算法具有较好的全局搜索能力,能够寻找到较优的飞行路径。
3. 蚁群优化算法蚁群优化算法模拟了蚂蚁的觅食行为,通过信息素的交流和更新来实现路径的优化。
蚁群算法具有较强的自适应性和鲁棒性,能够快速找到较优的路径。
在无人机航迹规划中,蚁群算法可以有效解决多无人机协同飞行的问题。
4. PSO算法粒子群优化(Particle Swarm Optimization,简称PSO)算法模拟了鸟群觅食的行为,通过不断地更新粒子的位置和速度,寻找最优解。
PSO算法具有较好的收敛性和全局搜索能力,在无人机航迹规划中能够有效地找到较优的路径。
5. 强化学习算法强化学习算法是一种通过试错和奖惩机制来优化路径选择的算法。
它通过构建马尔可夫决策过程(Markov Decision Process,简称MDP)模型,通过不断地与环境交互来学习最优策略。
强化学习算法在无人机航迹规划中能够适应环境的变化,快速学习到最优路径。
最短路径实验报告最短路径实验报告引言:最短路径算法是计算机科学中的一个经典问题,它在许多领域中都有广泛的应用,如交通规划、电路设计、网络通信等。
本实验旨在通过实践探索最短路径算法的实际应用,并对其性能进行评估。
一、问题描述:我们将研究一个城市的交通网络,其中包含多个节点和连接这些节点的道路。
每条道路都有一个权重,表示通过该道路所需的时间或距离。
我们的目标是找到两个节点之间的最短路径,即使得路径上各个道路权重之和最小的路径。
二、算法选择:为了解决这个问题,我们选择了Dijkstra算法和Floyd-Warshall算法作为比较对象。
Dijkstra算法是一种单源最短路径算法,它通过不断选择当前最短路径的节点来逐步扩展最短路径树。
Floyd-Warshall算法则是一种多源最短路径算法,它通过动态规划的方式计算任意两个节点之间的最短路径。
三、实验设计:我们首先构建了一个包含10个节点和15条道路的交通网络,每条道路的权重随机生成。
然后,我们分别使用Dijkstra算法和Floyd-Warshall算法计算两个节点之间的最短路径,并记录计算时间。
四、实验结果:经过实验,我们发现Dijkstra算法在计算单源最短路径时表现出色,但是在计算多源最短路径时效率较低。
而Floyd-Warshall算法在计算多源最短路径时表现出色,但是对于大型网络的单源最短路径计算则需要较长的时间。
五、性能评估:为了评估算法的性能,我们对不同规模的交通网络进行了测试,并记录了算法的计算时间。
实验结果显示,随着交通网络规模的增大,Dijkstra算法的计算时间呈指数级增长,而Floyd-Warshall算法的计算时间则呈多项式级增长。
因此,在处理大型网络时,Floyd-Warshall算法具有一定的优势。
六、实际应用:最短路径算法在实际应用中有着广泛的用途。
例如,在交通规划中,最短路径算法可以帮助我们找到最优的行车路线,减少交通拥堵。
单源最短路径及其优化介绍在图论中,单源最短路径问题是指在一个加权有向图中,找到从一个固定顶点到其他所有顶点的最短路径。
这个问题在实际应用中有很多场景,比如路网规划、网络路由等。
本文将介绍单源最短路径问题的常见算法以及优化策略,包括Dijkstra算法、Bellman-Ford算法和SPFA算法,并比较它们的优缺点。
Dijkstra算法Dijkstra算法是解决单源最短路径问题的经典算法之一。
它采用贪心策略,从起点开始,逐步扩展路径,直到到达目标顶点或者所有顶点都被遍历。
算法步骤1.初始化距离数组dist,将起点到自身的距离设为0,其他顶点的距离设为无穷大。
2.选择一个未访问的顶点u,使得dist[u]最小。
3.标记顶点u为已访问。
4.遍历顶点u的所有邻接顶点v,更新dist[v]的值,如果dist[u]+weight(u,v)<dist[v],则更新dist[v]为dist[u]+weight(u, v)。
5.重复步骤2-4,直到所有顶点都被访问或者找到目标顶点。
优化策略Dijkstra算法的时间复杂度为O(V^2),其中V是顶点的数量。
当图规模较大时,算法的效率会较低。
为了优化Dijkstra算法,可以使用以下策略:1.使用优先队列(最小堆)来存储未访问的顶点,每次选择dist最小的顶点进行扩展。
这样可以将时间复杂度降低到O((V+E)logV),其中E是边的数量。
2.使用稀疏图优化策略,即当图的边数相对于顶点数较少时,可以使用邻接表来表示图,减少空间开销。
Bellman-Ford算法Bellman-Ford算法是解决单源最短路径问题的另一种常见算法。
相比于Dijkstra算法,Bellman-Ford算法可以处理含有负权边的图。
算法步骤1.初始化距离数组dist,将起点到自身的距离设为0,其他顶点的距离设为无穷大。
2.重复V-1次以下步骤:–遍历图的所有边,对每条边(u, v),如果dist[u]+weight(u,v)<dist[v],则更新dist[v]为dist[u]+weight(u, v)。
离散数学是数学的一个分支,研究离散对象和不连续对象的数量关系及其结构的数学学科。
离散数学对于计算机科学和信息技术领域有着重要的应用,其中最短路径dijkstra算法是离散数学中的一个重要算法,它被广泛应用于计算机网络、交通规划、电路设计等领域,在实际应用中发挥着重要的作用。
一、最短路径dijkstra算法的基本原理最短路径dijkstra算法是由荷兰计算机科学家艾兹赫尔·达斯提出的,用于解决带权图中的单源最短路径问题。
该算法的基本原理是:从一个源点出发,按照权值递增的顺序依次求出到达其它各个顶点的最短路径。
具体来说,最短路径dijkstra算法的实现步骤如下:1. 初始化:将源点到图中各个顶点的最短路径估计值初始化为无穷大,将源点到自身的最短路径估计值初始化为0;2. 确定最短路径:从源点开始,选择一个离源点距离最近的未加入集合S中的顶点,并确定从源点到该顶点的最短路径;3. 更新距离:对于未加入集合S中的顶点,根据新加入集合S中的顶点对其进行松弛操作,更新源点到其它顶点的最短路径的估计值;4. 重复操作:重复步骤2和步骤3,直到集合S中包含了图中的所有顶点为止。
二、最短路径dijkstra算法的实现最短路径dijkstra算法的实现可以采用多种数据结构和算法,比较常见的包括邻接矩阵和邻接表两种表示方法。
在使用邻接矩阵表示图的情况下,最短路径dijkstra算法的时间复杂度为O(n^2),其中n表示图中顶点的个数;而在使用邻接表表示图的情况下,最短路径dijkstra 算法的时间复杂度为O(nlogn)。
三、最短路径dijkstra算法的应用最短路径dijkstra算法可以应用于计算机网络中路由选择的最短路径计算、交通规划中的最短路径选择、电路设计中的信号传输最短路径计算等领域。
在实际应用中,最短路径dijkstra算法通过寻找起始点到各个顶点的最短路径,为网络通信、交通规划、电路设计等问题提供有效的解决方案。
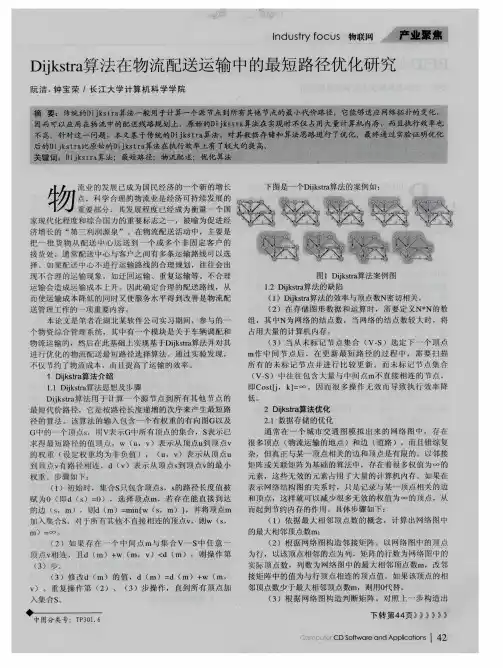
GIS最短路径分析中的Dijkstra算法及其优化摘要:现在的⼯程项⽬中客户对系统的要求越来越⾼,尤其是要做到及时响应和智能化。
⽬前提出的求取最短路径的算法很多,⽽Dijkstra算法是⼈们公认的最好的求解⽅法。
本⽂采⽤⾯向对象的思想设计存储结构,将⽹络分析中的空间实体进⾏⾯向对象的封装。
对象具有封装性、继承性、多态性特征,有利于清晰地表达多个不同类型的数据域,⽤⼀个对象可以描述结点、结点的相邻边、结点的相邻结点、起点到该结点的最短路径长度等多种信息,⽽且对象具有可重⽤性,可以避免代码重复编制,⼤⼤节省了存储空间,便于程序维护和扩展,提⾼了程序执⾏效率。
关键字:最短路径,Dijkstra算法,存储结构1 引⾔GIS中最短路径的求解⽆论是在地图搜索服务,智能交通系统,还是在其他各种各样的商业应⽤上,都是⼀个⾮常重要的核⼼问题,对这个领域进⾏研究的意义不⾔⽽喻。
近⼏年来,随着社会信息的不断膨胀,越来越复杂的实际问题不断涌现,对最短路径算法的研究提出了更⾼的要求。
最短路径算法是图论中的⼀个经典问题,其研究起源于20世纪50年代末期。
经典的图论与不断发展完善的计算机数据结构及算法的有效结合使得新的最短路径算法不断涌现。
针对不同的⽹络特征、应⽤需求及具体的软硬件环境,各种最短路径算法在空间复杂度、时间复杂度、易实现性及应⽤范围等⽅⾯各具特⾊。
⽽Dijkstra算法是⼀种较好的求解⽅法。
随着数据结构及计算机科学的发展,Dijkstra算法的各种改进算法应运⽽⽣。
为提⾼求解最短路径问题的效率,节省计算时间提供了有效的途径。
本⽂从数据结构的⾓度出发,提出了⼀种⾯向对象的Dijkstra算法的改进算法。
2 经典Dijkstra 算法的主要思想Dijkstra算法的基本思路如下:设S为最短距离已确定的顶点集,V—S是最短距离尚未确定的顶点集。
(1)初始化S初始化时,只有源点s的最短距离是已知的(SD(s)=0),故S={s}。
提高Dijkstra算法效率的优化方法Dijkstra算法是一种求解最短路径的算法,它通过在权值为非负的加权图中搜索从源节点到所有其他节点的最短路径,被广泛应用于路由协议、地图导航等领域。
但是,在面对大规模数据和复杂图结构时,Dijkstra算法的时间复杂度较高、运行效率较慢,不适用于现在快节奏的应用环境下。
因此,本文将介绍提高Dijkstra算法效率的优化方法。
一、堆优化Dijkstra算法中最费时的操作是在每个节点中找到未访问节点中距离源节点最近的节点。
通常,我们可以选择一种数据结构来存储所有未访问节点的距离,从而实现快速访问。
堆优化是其中一种优化方法。
堆是一种数据结构,其中包括一个数组,用于表示树的结构。
在Dijkstra算法中,我们可以使用堆来存储未访问节点的距离。
具体地说,对于每个节点,我们可以将它们的距离存储在堆节点中,并按距离从小到大排列。
每次从堆中选择最小距离的节点,从而加快Dijkstra算法的运行速度。
二、分支限界法分支限界法是一种广泛应用于搜索类问题的方法,它通过把问题分成一个个子问题来求解整个问题。
在Dijkstra算法中,我们可以使用分支限界法来减少搜索空间,从而提高算法效率。
具体而言,我们可以将未访问节点按距离从小到大排列,并在每次搜索时通过枚举拓展节点的方式,试图找到最短路径。
由于存在权重非负的条件,我们可以通过剪枝操作减少搜索时间。
例如,在第一次到达终点之后,我们可以停止搜索,并返回最短路径的长度,从而避免搜索整个未访问节点集合,提高算法的效率。
三、红黑树优化红黑树是一种平衡二叉搜索树,具有较快的查找、删除操作效率。
在Dijkstra算法中,我们可以使用红黑树来保存节点的距离和未访问状态,从而提高算法效率。
具体而言,我们可以使用红黑树来存储未访问节点的距离,并将节点的访问状态存储为红黑树节点的颜色。
每次访问节点时,我们判断它是否为最小距离节点,如果是,则将节点的访问状态改为黑色,并使用红黑树查找该节点的邻近节点,并更新它们的距离。
收稿日期:2006-05-24作者简介:章永龙(1976-),男,江西高安人,助教,硕士.文章编号:1006-4869(2006)03-0030-04D ij kstra 最短路径算法优化章永龙(扬州大学信息工程学院,江苏扬州225009)摘 要:传统D ijkstra 算法在求解节点间最短路径时,对已标识节点以外的大量节点进行了计算,从而影响了算法的速度.在对传统D ijkstra 算法分析的基础上,对其进行了优化,优化算法只对最短路径上节点的邻居做了处理,而不涉及到其他节点.因此,在优化算法中计算的节点数大幅减少,提高了算法的速度.关键词:最短路径;D ij kstra 算法;优化中图分类号:TP301.6文献标识码:AOpti m izati on of D ijkstra A lgorith mZ HANG Yong -long(Co llege of I nfor m ation Eng i n neering ,Un i v ersity ofY angzhou ,Y angzhou 225009,Ch i n a)Abst ract :W hen a shortest path bet w een nodes is searched w ith D ij k stra algo rithm ,a l o t of nodes a w ay fro m lagged nodes are invo lved ,so that the effic i e ncy of D ij k stra a l g orithm is lo w.An opti m ization algo -rit h m is presented i n this paper based on analysis of D ijkstra algor ithm .Only these nodes that the ne i g h -bor of nodes i n t h e shortest path are processed ,and other nodes aren t pr ocessed .Therefore ,the number of pr ocessed nodes is large ly reduced in the opti m izati o n a l g orithm,and efficiency o f the opti m izati o n a-l gorith m is i m proved .K ey w ords :the shortest path ;D ij k stra a l g orit h m;opti m ization0 引 言实际生活中的许多问题都可归结于图论中的最短路径问题,如:电子导航、交通旅游、公交出行等.这里的最短路径不仅仅指地理意义上的距离最短,可引申为最少费用、最短时间、延时最短、吞吐量最大等约束条件.传统的最短路径算法,如D ij k stra 算法[1]用来求解图上从任一节点(源点)到其余各节点的最短路径.其时间复杂度为O(N 2);采用邻接矩阵存储网络拓扑结构,需要(N N )的存储空间,随着节点数N 的增大,其计算效率和存储效率越低.针对此问题,提出了D ij k stra 算法的改进[2-5],本文在对传统D ij k stra 算法分析的基础上,对其进行了优化,优化算法只对最短路径上节点的邻居做处理,而不涉及到其他节点.1 传统D ij kstra 算法最短路径问题是指在一个非负权值图中找出两个指定节点间的一条权值和最小的路径.D ij k stra 算法是经典的解决最短路径问题的算法,它可以找出指定节点到其他各个节点间的最短路径,其主要思想是首先从第25卷第3期2006年8月南昌工程学院学报Journal o fN anchang Institute o f T echno l ogy V o.l 25N o .3Aug .2006源点求出长度最短的一条路径,然后通过对路径长度迭代得到从源点到其他各目标节点的最短路径.设w j 是从源点s 到节点j 的最短路径长度;p j 是从s 到j 的最短路径中j 点的前一节点.S 是标识集合;T 是未标识集合;M 是节点集合.d ij 是节点i 到节点j 的距离(i 与j 直接相连,否则d ij = ).算法步骤如下[1]:S tep0:S={s};T=M -S ;w j =d sj (j T ,s 与j 直接相连)或w j = (j T ,s 与j 不直接相连).S tep1:在T 中找到节点i ,使s 到i 的距离最小,并将i 划归到S .(可从与s 直接相连的j 中考虑)若d si =m in j T d s j j 与s 直接相连,则将i 划归到S 中,即S={s ,i},T=T -{i};p i =s .S tep2:修改T 中j 节点的w j 值:w j =m i n j Ti S(w j ,w i +d ij );若w j 值改变,则p j =i .S tep3:选定所有的w j 最小值,并将其划归到S 中:w i =m in j Tw j ;S=S {i };T =T-{i};若|S |=n ,所有节点已标识,则算法终止,否则,转入Step2.由以上算法步骤可知,用标记法实现D ij k stra 算法的主要步骤是从未标记的节点中选择一个权值最小的链路作为下一个转接点,而要选择一个权值最小的链路就必须把所有节点都扫描一遍,在大数量节点的情况下,这往往成为制约算法计算效率的关键因素.2 D ij kstra 算法的优化2.1 算法优化思路通过分析传统D ij k stra 算法的基本思路,传统D ijkstra 算法存在如下两点不足:(1)当从未标记节点集合T 中选定一个节点k 作为转接点后时,需扫描未标记节点集合T 中的节点j 并更新其w j 值,而未标记节点集合T 中往往包含大量与转接节点k 不直接相连的节点i(即d ki = );(2)在未标记节点集合T 中选择一个w 值最小的节点作为下一个转接节点,然而下一个转接节点往往是与标记节点集合S 中的节点直接相连的.基于上述两点不足,本文对传统D ijkstra 算法进行了优化,算法优化思路为:首先从源点s 的邻居集合NB s (与s 直接相连的节点集合)中选择距离最小的邻居节点k 作为转接点,同时将k 划归到标识集合S(初始时,S 为{s}).然后对k 邻居集合与标识集合的差集(NB k -S )中节点j 的w j 值进行更新,从标识集合S 中所有节点的邻居集合的并集与标识集合S 的差集( NB i -S ,i S )中选择一个w k 值最小的节点作为下一个转接点,并划归到标识集合S 中.重复上述过程,直到所有的节点都被标识过,即|S |=n,算法结束.2.2 优化算法描述设NB i 为节点i 的邻居集合;S 为标识集合;w j 是从源点s 到节点j 的最短路径长度;p j 是从s 到j 的最短路径中j 点的前一节点;d ij 是节点i 到节点j 的距离.算法步骤如下:S tep0:初始化S={s};w i =d si (i NB s );否则w i = (i NB s );p i =s .S tep1:若d s k =m in j N Bsd sj ,则S=S {k }.S tep2:修改NB k -S 中的w j 值:w j =m in j NB k-S{w j ,w k +d kj };若w j 值改变,则p j =k .S tep3:选定NB i -S (i S )中的w j 最小值,并将其划归到S 中:w k =m i n j NB i -Si Sw j ;S=S {k };若|S |=n 若,所有节点已标识,则算法终止,否则,转到Step2.用Pascal 程序设计语言描述的优化D ijkstra 算法如下:PROCEDURE Odij k stra(ver num:integer ;star:t i n teger ;VAR Ne i g hbor :ARRAY [vernum ]of se;tVAR W e i g h:t ARRAY [SIZE]of rea;l VAR W:ARRAY [vernum ]of rea l);/*ver num 为网络拓扑的节点数;start 为指定节点;N eighbor 为节点的邻居集合;W eigh t 为链路的权值;W为从指定节点到该节点的最短路径长度;S 为标识集合;P 为节点最短路径上的前一个节点;SIZE =ver -31第3期章永龙:D ij kstra 最短路径算法优化nu m *(ver num +1)/2,在这里采用压缩存储网络拓扑的关联矩阵.*/BEG I NFOR :i =1TO ver num DOBEG I N //初始化W 和PI F (i I N N eighbor[start])THEN BEG I N W [i]:=W eight[k];P[i]:=star;tE ND //k=*i (i-1)/2+start-1(i>=start);k=star*t (start-1)/2+i-1(start>i)ELSE W [i]:=m ax i n ;t //m ax i n t 为计算机允许的最大值E ND ;S:=[start];k :=star;tCS :=[];//S 中所有元素邻居集合的并集与S 的差集,初始为空集.FOR n :=1TO ver nu m -1DOBEG I N//从S 中所有元素邻居集合的并集与S 的差集中选择一个W 值最小的节点CS :=CS+Ne i g hbor[k]-S-[k];FOR :j =1TO LE N (CS)TH E N //LE N ()为求集合中元素个数的函数.BEG I NI F (W [CS[j]]<m in)THEN //m i n :=-1;BEG I N m i n =W [CS[j]];v=;j END;E ND ;k :=CS[v];//k 为选定点S :=S+[k];//将节点k 划归到S 中//更新k 节点的邻居集合中元素的W 值FOR :j =1TO LE N (Ne i g hbor[k])DO BEG I NI F (W [N eighbor[k][j]]>W [k]+W eight[m ])TH E NBEG I N W [N eighbo r[k][j]]:=W [k]+W ei g ht[m ];P[Ne i g hbor[k][j]]:=k ;END;//m =*j (j-1)/2+k-1(j>=k);m =k *(k-1)/2+j-1(k>j)图1 非负权值图E ND ;END;E ND .图1为带权值的无向图G 7,对G 7施行优化D ij k stra 算法,则可得从v 1到其余各节点的最短路径,以及运算过程中的选定点、w 值、邻居集合及邻居集合节点并集与S 的差集的变化状况,如表1所示.3 算法分析传统D ij k stra 算法基于广度优先的搜索策略,从指定节点出发,通过权值迭代遍历所有其他节点后,最后得到从指定节点到其他各节点的最短路径树.它采用线性数组结构存储其关联矩阵,在提取最短路径节点时需要访问所有的未标记节点,算法的运行时间为O(N 2);而本文提出的优化算法在更新最短路径值与选择最短路径值最小的节点时,仅仅涉及到节点的邻居集合及已标识集合中所有节点的邻居集合与已标识集合的差集,其运行时间取决于转接点的邻居集合的元素数量多少32南昌工程学院学报2006年(而该数量值往往小于未标识集合中的元素个数).当网络拓扑结构图具有的节点数N 较大且其关联矩阵为一个稀疏矩阵时,相对传统D ij k stra 算法,优化算法大大减少了计算次数与比较次数,在一定程度上提高了运算速度.表1 优化的D ij kstra 算法求解v 1到其他各节点最短路径的过程迭代次数v 1v 2v 3v 4v 5v 6v 7选定点w i NB iSNB i -SUNB i -S (i S )00251 v 1w 1=0(v 2,v 3,v 4)(v 1)125① v 4w 4=1(v 1,v 2,v 3,v 5)(v 1,v 4)(v 2,v 3,v 5)(v 2,v 3,v 5)2②42v 2w 2=2(v 1,v 3,v 4)(v 1,v 2,v 4)(v 3)(v 3,v 5)34②v 5w 5=2(v 3,v 4,v 6,v 7)(v 1,v 2,v 4,v 5)(v 3,v 6,v 7)(v 3,v 6,v 7)4③34v 3w 3=3(v 1,v 2,v 4,v 5,v 6)(v 1,v 2,v 3,v 4,v 5)(v 6)(v 6,v 7)5③4v 6w 6=3(v 3,v 5,v 7)(v 1,v 2,v 3,v 4,v 5,v 6)(v 7)(v 7)6④v 7w 7=4(v 5,v 6)(v 1,v 2,v 3,v 4,v 5,v 6,v 7)5 结束语在分析传统D ijkstra 算法的基础上,针对传统D ijkstra 算法存在的两点不足之处,对其进行了优化处理.当网络的规模较大及其关联矩阵为一个稀疏矩阵时,本文提出的优化算法,与传统D ij k stra 算法相比,能大大减少了计算次数及比较次数,提高了运算效率.参考文献:[1]石文孝.通信网理论基础[M ].吉林:吉林大学出版社,2001.[2]李 峰,张建中.网络最短路径算法的改进及实现[J].厦门大学学报(自然科学版),2005,(44):40-42[3]乐阳等.D ij kstra 最短路径算法的一种高效率实现.武汉测绘科技大学学报,1999,24(3):62:64[4]蒲在毅,任建军.用标号法实现单源最短路径问题的迪杰斯特(d ij kstra)算法[J].四川师范学院学报(自然科学版),2003,(24):52-54[5]靳晓强.双向D ijkstra 算法及中间链表加速方法[J].计算机仿真,2004,(21):93-95(上接第14页)(2)为减弱爆破地震波向洞顶传播,布设减震孔;(3)采用微差爆破,寻找最优间隔时间,使爆破震动强度最小;(4)优化爆破参数,降低单位炸药耗量,不耦合装药,限制一次爆破最大起爆药量.通过采取有效的降低爆破地震波的措施,既节约了工程投资,又保证了工程施工进度,为按期完成本工程奠定了良好的基础,同时,为类似工程的施工提供了可借鉴的依据.参考文献:[1]李存国,王润生,王 玲.爆破地震效应临近建筑物的影响[J].云南冶金,2006,(3):10-17.[2]张 丹,段恒建,曾福洪.分段爆破地震强度的试验研究[J].爆炸与冲击,2006,(3):279-283.[3]G B6722 2003,爆破安全规程[S].2003.[4]吴 立,陈建平,舒家华.论爆破的地震效应[J].爆炸器材,1999,(5):24-27.33第3期章永龙:D ij kstra 最短路径算法优化。
最短路径Dijkstra算法的改进最短路径问题是图论中的一个重要问题,通过求解两个顶点之间的最短路径,能够帮助我们在网络、交通、通信等领域做出合理的决策。
其中,Dijkstra算法是一种经典的解决方案。
然而,随着图规模逐渐增大,传统的Dijkstra算法在计算效率上存在一定的瓶颈。
因此,人们对Dijkstra算法进行了一系列改进,以提高算法的执行效率和准确性。
1. 贪心策略优化传统的Dijkstra算法使用贪心策略,每次选择当前最短路径中权值最小的边进行扩展。
但是,这种策略容易导致局部最优解,并且需要对所有边进行排序操作。
为了优化这一问题,可以引入优先队列(优先级队列)数据结构来存储边。
通过使用合适的数据结构,可以有效地减少排序操作的次数,从而提高算法的效率。
2. 堆优化为了进一步提高算法的效率,我们可以将优先队列替换为堆数据结构。
堆是一种可以快速找到最小值(或最大值)的数据结构,与优先队列相比,堆的插入和删除操作更快。
通过使用堆来存储边,可以在每次选择最短路径时更加高效地更新队列,从而加快算法的执行速度。
3. 斐波那契堆优化传统的堆数据结构在执行删除操作时可能会引发较大的代价,而斐波那契堆是一种可以更快地执行这些操作的数据结构。
斐波那契堆能够在O(1)平均时间内执行插入和删除操作,同时也能保持堆的性质。
通过将斐波那契堆应用于Dijkstra算法中,可以进一步提高算法的执行效率,尤其在大规模图中的表现更加出色。
4. A*算法改进Dijkstra算法忽略了目标节点的位置,而在一些特定场景下,我们希望找到一个特定节点到目标节点的最短路径。
为此,可以引入A*(A-star)算法来改进Dijkstra算法。
A*算法在计算路径的过程中,综合考虑了当前节点到目标节点的启发式估计值(通常使用曼哈顿距离或欧几里得距离)。
通过引入启发式估计值,A*算法能够更加聪明地选择扩展节点,从而更加准确地找到最短路径。
5. 并行计算优化随着计算机硬件技术的发展,我们也可以将Dijkstra算法中的计算过程进行并行化,以进一步提高算法的执行效率。
最短路径算法改进方案引言:最短路径算法是计算网络中两个节点之间最短路径的常用方法。
然而,在某些情况下,传统的最短路径算法可能表现出一定的局限性。
本文将介绍一些改进方案,以提升传统最短路径算法的效率和准确性。
一、Dijkstra算法的优化Dijkstra算法是一种用于计算带权有向图中单源最短路径的经典算法。
然而,当网络规模较大时,Dijkstra算法可能会消耗较多的计算资源。
为了改进这一问题,可以考虑以下方案:1. 启发式Dijkstra算法:通过引入启发式函数,可根据当前节点到目标节点的估计距离优先选择下一个节点。
这样可以在一定程度上减少搜索空间,从而提高算法效率。
2. 堆优化技术:传统的Dijkstra算法使用线性搜索来选择下一个节点,造成时间复杂度较高。
借助二叉堆等数据结构,我们可以实现快速查找和删除操作,从而加速节点的选择过程。
二、Floyd-Warshall算法的改进Floyd-Warshall算法是一种用于计算所有节点对之间最短路径的经典算法。
然而,当网络规模较大时,Floyd-Warshall算法的时间复杂度为O(n^3),这在实际应用中可能效率较低。
以下是一些改进方案:1. 分治策略:将网络分割成多个子图,并分别计算每个子图中的最短路径。
通过合并各个子图的最短路径结果,可以减少整体计算量,提高算法效率。
2. 动态规划技巧:借助动态规划的思想,可以避免重复计算已知的最短路径。
通过维护一个中间节点集合,我们可以根据已有的最短路径信息来推导出更短的路径,从而减少计算时间。
三、A*算法的增强A*算法是一种启发式搜索算法,通过引入启发函数来优化最短路径的搜索过程。
以下是一些增强方案:1. 多目标搜索:传统的A*算法只能找到一条最短路径,而在实际应用中,我们可能需要找到多条满足条件的最短路径。
通过设置多个目标节点,我们可以在一次搜索中获取多条最短路径,提高算法的灵活性。
2. 动态启发式函数:启发式函数在A*算法中起到引导搜索的作用。