一种基于OpenCV的三维重建实现方案
- 格式:pdf
- 大小:594.80 KB
- 文档页数:3
Opencv多相机光束平差法1. 简介多相机光束平差法(Bundle Adjustment)是一种用于相机标定和三维重建的方法,它通过优化相机的内外参数和三维点的位置,使得投影误差最小化。
OpenCV是一个流行的计算机视觉库,其中包含了用于多相机光束平差法的函数和工具。
在本文中,我们将介绍多相机光束平差法的基本原理和OpenCV中相关的函数和用法。
我们将从相机标定开始,然后介绍如何使用多相机光束平差法进行三维重建。
2. 相机标定相机标定是多相机光束平差法的第一步,它的目的是确定相机的内外参数。
在OpenCV中,我们可以使用cv::calibrateCamera函数来进行相机标定。
相机标定需要至少一副棋盘格图像,通过对图像中的棋盘格进行检测和角点提取,可以计算出相机的内外参数。
以下是相机标定的步骤:1.收集棋盘格图像:在不同的角度和位置拍摄多张包含棋盘格的图像。
2.棋盘格角点检测:使用OpenCV中的cv::findChessboardCorners函数,对每张图像进行角点检测。
3.角点提取:使用cv::cornerSubPix函数对检测到的角点进行亚像素级别的精确提取。
4.相机标定:使用cv::calibrateCamera函数,输入检测到的角点和相应的世界坐标,计算相机的内外参数。
相机标定后,我们可以得到相机的内外参数矩阵,包括相机的焦距、主点、畸变系数、旋转矩阵和平移向量等。
3. 多相机光束平差法多相机光束平差法是通过优化相机的内外参数和三维点的位置,使得投影误差最小化。
在OpenCV中,我们可以使用cv::bundleAdjust函数来进行多相机光束平差法。
多相机光束平差法的步骤如下:1.三维点初始化:首先,需要初始化一些三维点的位置,可以使用相机标定得到的相机姿态和特征点的匹配结果进行三角化得到初始的三维点。
2.投影误差计算:对于每个相机,计算其投影误差,即将三维点投影到图像平面上,并计算其与对应的特征点之间的距离。
转OpenCV学习笔记17 双目测距与三维重建三、双目定标和双目校正双目摄像头定标不仅要得出每个摄像头的内部参数,还需要通过标定来测量两个摄像头之间的相对位置(即右摄像头相对于左摄像头的三维平移t和旋转R参数)。
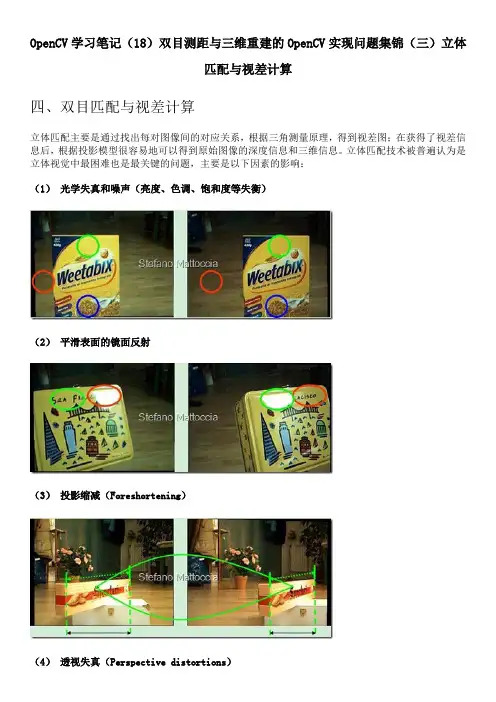
图6要计算目标点在左右两个视图上形成的视差,首先要把该点在左右视图上两个对应的像点匹配起来。
然而,在二维空间上匹配对应点是非常耗时的,为了减少匹配搜索范围,我们可以利用极线约束使得对应点的匹配由二维搜索降为一维搜索。
图7而双目校正的作用就是要把消除畸变后的两幅图像严格地行对应,使得两幅图像的对极线恰好在同一水平线上,这样一幅图像上任意一点与其在另一幅图像上的对应点就必然具有相同的行号,只需在该行进行一维搜索即可匹配到对应点。
图8 1.关于cvStereoCalibrate的使用如果按照Learning OpenCV的例程,直接通过cvStereoCalibrate来实现双目定标,很容易产生比较大的图像畸变,边角处的变形较厉害。
最好先通过cvCalibrateCamera2()对每个摄像头单独进行定标,再利用cvStereoCalibrate进行双目定标。
这样定标所得参数才比较准确,随后的校正也不会有明显的畸变。
我使用的程序主要基于Learning OpenCV的例程ch12_ex12_3.cpp,其中主要部分如下:///////////////////////////////////////////////////////////////// ///////////是否首先进行单目定标?cvCalibrateCamera2(&_objectPoints,&_imagePoints1,&_npoints,imageSi ze,&t_M1,&t_D1,NULL,NULL,CV_CALIB_FIX_K3);cvCalibrateCamera2(&_objectPoints,&_imagePoints2,&_npoints,imageSize, &t_M2,&t_D2,NULL,NULL,CV_CALIB_FIX_K3);///////////////////////////////////////////////////////////////////// ///////进行双目定标cvStereoCalibrate(&_objectPoints,&_imagePoints1,&_imagePoints2,&_npoi nts,&t_M1,&t_D1,&t_M2,&t_D2,imageSize,&t_R,&t_T,&t_E,&t_F,cvTermCrite ria(CV_TERMCRIT_ITER+CV_TERMCRIT_EPS,100,1e-5));//flags为默认的CV_CALIB_FIX_INTRINSIC上面的t_M1(2),t_D1(2)分别是单目定标后获得的左(右)摄像头的内参矩阵(3*3)和畸变参数向量(1*5);t_R,t_T分别是右摄像头相对于左摄像头的旋转矩阵(3*3)和平移向量(3*1),t_E是包含了两个摄像头相对位置关系的Essential Matrix(3*3),t_F则是既包含两个摄像头相对位置关系、也包含摄像头各自内参信息的Fundamental Matrix(3*3)。
一、概述双目视觉是一种通过两个摄像头拍摄同一场景来获取深度信息的技术,它在计算机视觉领域有着广泛的应用。
在双目视觉中,图像识别、匹配和三维重建是其中的关键环节。
OpenCV是一个开源的计算机视觉库,提供了丰富的图像处理和计算机视觉算法。
本文将介绍使用OpenCV实现双目视觉三维重建的代码,帮助读者快速上手这一技术。
二、环境准备在开始编写双目视觉三维重建代码之前,我们需要准备好相应的开发环境。
首先确保已经安装了OpenCV库,可以通过冠方全球信息站或者包管理工具进行安装。
需要准备两个摄像头,保证两个摄像头的焦距、畸变参数等校准信息。
确保安装了C++或者Python的开发环境,以便编写和运行代码。
三、双目视觉图像获取1. 初始化摄像头在代码中需要初始化两个相机,并设置相应的参数,例如分辨率、曝光时间、白平衡等。
可以使用OpenCV提供的方法来实现这一步骤。
2. 同步获取图像由于双目视觉需要同时获取两个摄像头的图像,所以我们需要确保两个摄像头的图像获取是同步的。
可以通过多线程或者硬件同步的方式来实现图像的同步获取。
四、双目视觉图像预处理1. 图像校准由于摄像头的畸变等因素会影响后续的视图匹配和三维重建结果,因此需要对图像进行校准。
可以使用OpenCV提供的摄像头校准工具来获取相机的内参和外参,通过这些参数对图像进行去畸变处理。
2. 图像匹配在获取到双目图像之后,需要对这两个图像进行特征提取和匹配。
可以使用SIFT、SURF等特征提取算法来提取图像的关键点,并使用特征匹配算法(例如FLANN或者暴力匹配)来进行图像匹配。
五、立体匹配1. 视差计算在进行图像匹配之后,我们可以通过计算视差来获取场景中不同物体的深度信息。
OpenCV提供了多种视差计算算法,例如BM、SGBM 等,可以根据实际情况选择适合的算法。
2. 深度图生成通过视差计算得到的视差图可以进一步转换为深度图,从而得到场景中每个像素点的深度信息。
---------------------------------------------------------------范文最新推荐------------------------------------------------------ 一种基于OpenCV三维重建实现方案摘要以计算机视觉三维重建技术为研究对象,分析了开放计算机视觉函数库OpenCV中的三维重建模型,通过六个步骤,特别是摄像机标定和立体匹配中极线约束方法的使用,给出了基于OpenCV的三维重建算法。
该算法充分发挥了OpenCV的函数库功能,提高了计算的精度效率,具有良好的跨平台移植性,可以满足各种计算机视觉系统的需要。
关键词计算机视觉;三维重建;OpenCV;摄像机标定;极线约束,应、特征检测与匹配定位精度等,一般来讲,距离测量精度与匹配定位精度成正比,与摄像机基线长度成反比。
增大基线长度可以改善深度测量精度,但同时会增大图像间的差异,增加匹配的困难程度。
因此,要设计一个精确的立体视觉系统,必须综合考虑各方面的因素,保证各环节都具有较高的精度。
2.6后处理[6]后处理包括深度插值、误差校正和精度改善。
立体视觉的最终目的是恢复景物可视表面的完整信息,目前,无论哪种匹配方法都不可能恢复出所有图像点的视差,因此对于一个完整的立体视觉系统,必须进行最终的表面内插重建。
3基于OpenCV的三维重建OpenCV[2]中采用的定标方法是介于传统定标方法和自定标方法之间的一种方法,由张正友在其论文[3]中提出的。
这种方法不需要知道摄像机运动的具体信息,这点比传统定标技术更为灵活,同时仍需要一个特定的标定物以及一组已知的特征基元的坐标,这点不如自定标灵活。
它通过在至1 / 7少3个不同的位置获取标定物的图像,计算出摄像机所有的内外参数。
由于它比传统定标技术更为灵活,又可以得到不错的定标精度,所以被OpenCV所采纳。
在这个模型的定标过程中将用到的三个坐标系:图像坐标系,摄像机坐标系和世界坐标系。
如何利用计算机视觉技术进行3D物体重建与识别计算机视觉技术是指通过计算机对图像或视频进行分析、理解和处理的一种技术。
随着计算机视觉技术的不断发展,3D物体重建与识别成为了该领域的研究热点之一。
本文将介绍如何利用计算机视觉技术进行3D物体重建与识别的方法和应用。
一、3D物体重建技术1. 点云重建:点云是一种用于描述物体表面形状的数学模型。
点云重建技术通过从多个图像或激光扫描数据中提取特征点,并利用这些特征点生成点云模型来实现3D物体的重建。
2. 立体视觉重建:立体视觉重建是通过分析多个视角的图像,利用物体在不同视角下的几何关系,从而恢复出物体的三维形状。
它可以通过双目相机或多目相机获取多个视角的图像,并通过图像配准和三角测量等技术实现物体的三维重建。
3. 深度学习重建:深度学习在计算机视觉领域的应用日益广泛,其中包含了用于3D物体重建的网络模型。
通过训练神经网络,可以学习到从图像到三维形状的映射关系,从而实现3D物体重建。
二、3D物体识别技术1. 物体检测与识别:物体检测是指在图像或视频中准确定位物体的位置,并识别物体的类别。
常见的物体检测算法包括基于特征的方法、机器学习方法和深度学习方法等。
物体检测与识别技术可以应用于自动驾驶、智能监控等领域。
2. 三维物体姿态估计:三维物体姿态估计是指通过计算机视觉技术来推测物体在三维空间中的位置和姿态。
通过从多个视角的图像中分析物体的几何特征,可以实现对物体的姿态估计,该技术在虚拟现实、增强现实等领域有着广泛的应用。
三、计算机视觉技术的应用场景1. 工业制造:利用计算机视觉技术进行3D物体重建和识别,可以实现自动检测和质量控制,提高生产效率和产品质量。
2. 虚拟现实和增强现实:通过3D物体重建和识别技术,可以将真实世界中的物体重建成虚拟模型并投射到虚拟现实或增强现实环境中,提供更加沉浸式和真实感的用户体验。
3. 智能监控:计算机视觉技术可以应用于智能监控系统中,实现对特定物体或行为的自动识别和监测,提高安全性和便捷性。
旧题新作——基于MATLAB的切片三维重建
切片三维重建是一种非常重要的方法,可以用于对三维物体进行分析、计算和可视化。
本文介绍了一种基于MATLAB的切片三维重建方法。
首先,我们需要对三维物体进行切片,将其分解为一系列二维图像。
这可以通过先将
三维物体转换为灰度图像,然后利用阈值分割和连通区域分析等方法来实现。
分析了三维
物体的特点后,我们可以确定切片方向和间隔。
然后,我们需要对每个切片图像进行处理,将每个图像中的物体进行分割,得到物体
的轮廓线。
这可以通过使用图像处理工具箱中的边缘检测算法来实现。
经过处理后,我们
可以获得每个切片图像中物体的轮廓线。
接着,我们需要将每个切片图像中的轮廓线进行重建,得到三维物体的表面。
这可以
通过使用曲面拟合算法来实现。
曲面拟合算法可以将每个轮廓线中的点拟合成一个三维曲面,最终得到整个物体的表面。
最后,我们可以将三维物体进行可视化,得到一个真实的三维模型。
这可以通过使用
三维可视化工具来实现。
将三维物体的表面数据输入到可视化工具中,即可得到一个真实
的三维模型。
同时,我们也可以对三维模型进行进一步的处理和分析,比如计算表面积和
体积等。
opencv双目视觉三维重建代码双目视觉三维重建是计算机视觉领域中的一个热门研究方向,它利用由两个摄像头捕捉的图像来还原场景的三维结构信息。
OpenCV是一个广泛使用的开源计算机视觉库,它提供了丰富的算法和工具,可用于实现双目视觉三维重建。
本文将介绍一种基于OpenCV库的双目视觉三维重建代码。
首先,我们需要准备一对标定好的摄像头进行双目拍摄。
相机标定是一个关键的步骤,它用于确定摄像头的内参矩阵和外参矩阵,以及图像畸变参数。
OpenCV提供了一些函数和工具来进行相机标定,我们可以使用这些工具来标定我们的摄像头。
接下来,我们需要加载标定好的参数和校正映射。
校正映射是一个重要的步骤,它用于将摄像头采集到的图像进行畸变校正,以便后续的立体匹配。
OpenCV提供了`cv::initUndistortRectifyMap`函数来计算校正映射,并使用`cv::remap`函数来应用校正映射到图像上。
然后,我们需要通过双目立体匹配算法来计算视差图。
视差图是通过比较两个摄像头捕捉到的图像中的对应像素点的差异来计算得到的,它表示物体在不同深度上的位置差异。
OpenCV提供了几种双目立体匹配算法,比如基于块匹配的SAD (Sum of Absolute Differences)算法和基于全局优化的SGBM(Semi-Global Block Matching)算法。
我们可以根据自己的需求选择适合的算法来计算视差图。
计算完视差图后,我们可以根据相机的内参、外参和视差图来还原物体的三维结构信息。
通过三角测量的方法,我们可以将每个像素点的视差值转化为物体的深度值。
OpenCV提供了`cv::reprojectImageTo3D`函数来进行三维重建,并将结果保存在点云中。
最后,我们可以对点云进行可视化展示。
OpenCV提供了一些可视化工具,比如`cv::viz`模块和`cv::imshow`函数,可以将点云渲染成三维的视图,并在屏幕上显示出来。
OpenCV 练习题一、基础操作题1. 创建一个空白的黑色图像,尺寸为 300x200。
2. 在图像上绘制一个红色的正方形,边长为 100。
3. 在图像上绘制一个蓝色的圆形,半径为 50。
4. 在图像上绘制一条从左上角到右下角的绿色直线。
5. 在图像上绘制一个黄色的三角形,边长分别为 50、60、70。
二、图像处理题6. 读取当前目录下的 "example.jpg" 图像。
7. 将图像转换为灰度图。
8. 对灰度图进行高斯模糊处理,模糊半径为 5。
9. 对图像进行边缘检测,使用 Canny 算法。
10. 对图像进行二值化处理,阈值设置为 128。
三、特征检测与匹配题11. 在当前目录下找到 "image1.jpg" 和 "image2.jpg",使用SIFT 算法检测特征点。
12. 使用 FLANNKDTREE 算法进行特征点匹配。
13. 根据匹配结果,绘制特征点匹配图。
14. 使用 BRUTEFORCE 算法进行特征点匹配。
15. 使用 BFMatcher 创建一个匹配器,并使用它进行特征点匹配。
四、图像变换题16. 对图像进行平移变换,向右平移 50 像素,向下平移 30 像素。
17. 对图像进行旋转变换,旋转角度为 45 度。
18. 对图像进行缩放变换,缩放比例为 0.5。
19. 对图像进行翻转变换,水平翻转。
20. 对图像进行剪切变换,剪切区域为左上角 (50, 50) 到右下角 (200, 150)。
五、视频处理题21. 打开当前目录下的 "video.mp4" 视频文件。
22. 读取视频的第一帧图像。
23. 对视频帧进行颜色空间转换,从 BGR 转换到 HSV。
24. 在视频帧上添加文字 "Hello, OpenCV!",字体为 Arial,字号为 24。
25. 显示视频帧,并等待用户按键后继续显示下一帧。
三维重建实验报告1.基于特征点的重建1.1.特征提取由双目立体视觉进行三位重建的第一步是寻找两幅图像中的对应点。
目前人们已经发明了很多二维图像配准算法,比如SIFT, SURF等等。
最新版本的OpenCV 2.2中的features2d库中包含了很多常用的算法,其中特征点定位的算法有FAST, SIFT, SURF ,MSER, HARRIS等,特征点描述算法有SURF, SIFT等,还有若干种特征点匹配算法。
这三个步骤的算法可以任选其一,自由组合,非常方便。
我经过实验,选择了一种速度、特征点数量和精度都比较好的组合方案:FAST角点检测算法+SURF特征描述子+FLANN(Fast Library for Approximate Nearest Neighbors) 匹配算法。
在匹配过程中需要有一些措施来过滤误匹配。
一种比较常用的方法是比较第一匹配结果和第二匹配结果的得分差距是否足够大,这种方法可以过滤掉一些由于相似造成的误匹配。
还有一种方法是利用已经找到的匹配点,使用RANSAC算法求得两幅视图之间的单应矩阵,然后将左视图中的坐标P用单应矩阵映射到右视图的Q点,观察与匹配结果Q’的欧氏距离是否足够小。
当然由于图像是具有深度的,Q与Q’必定会有差距,因此距离阈值可以设置的稍微宽松一些。
我使用了这两种过滤方法。
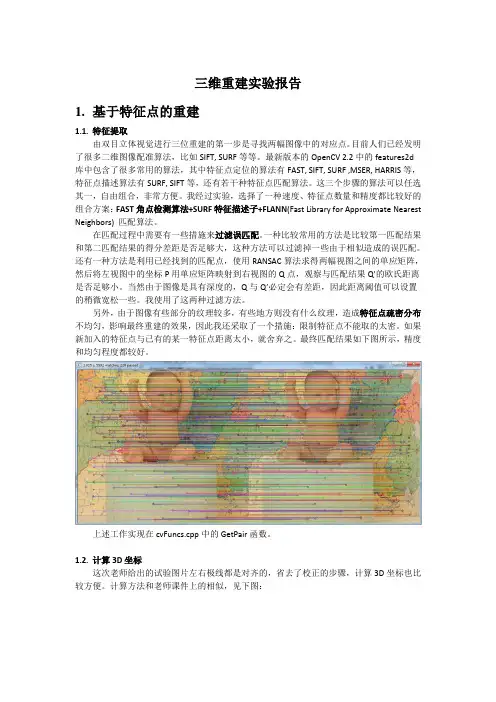
另外,由于图像有些部分的纹理较多,有些地方则没有什么纹理,造成特征点疏密分布不均匀,影响最终重建的效果,因此我还采取了一个措施:限制特征点不能取的太密。
如果新加入的特征点与已有的某一特征点距离太小,就舍弃之。
最终匹配结果如下图所示,精度和均匀程度都较好。
上述工作实现在cvFuncs.cpp中的GetPair函数。
1.2.计算3D坐标这次老师给出的试验图片左右极线都是对齐的,省去了校正的步骤,计算3D坐标也比较方便。
计算方法和老师课件上的相似,见下图:如果(x1,y1),(x2,y2)用各自图像上的像素坐标表示,L 和(X,Y,Z)用毫米表示,f 用像素表示的话,用相似三角形的知识就可以推出:211/2/2f Z Lx W x X z fH y Y z fx =--=-=-- 其中W 和H 是图像的宽高(像素数),y 是y1和y2的均值,Z 加负号是为了保持右手坐标系,而Y 加负号是由于图像成像过程中上下发生了倒转。
旧题新作——基于MATLAB的切片三维重建
三维重建技术在医学和工程领域中得到了广泛应用。
其中,通过对医学图像的切片进行处理,可以实现三维图像的重建。
本文将介绍一种基于MATLAB的切片三维重建方法。
首先,需要用MATLAB读取切片图像。
可以使用MATLAB提供的imread函数或者dicomread函数读取DICOM格式的医学图像。
如果读取的是普通图像,则需要将其转换为灰度图像。
接下来,需要将读取的切片图像进行处理,以便进行三维重建。
可以使用MATLAB的图像处理工具箱中的各种函数进行处理,例如对图像进行平滑、分割、去噪等。
此外,还需要进行图像配准,以保证各个切片图像之间的对应关系。
接着,需将处理后的切片图像进行三维重建。
可以使用MATLAB中的isosurface函数将体素数据转换成三维网格数据,从而生成三维模型。
该函数的参数包括体素数据、阈值等参数。
体素数据可通过将切片图像进行堆叠得到,阈值则用于确定目标区域的边界。
最后,需要对生成的三维模型进行可视化处理。
可以使用MATLAB中的patch函数将三维网格数据转换成可视化对象,并通过设置颜色、透明度等属性进行渲染。
此外,还可以通过旋转、平移等操作改变视角,进一步观察三维模型的细节。
总的来说,基于MATLAB的切片三维重建方法可以实现快速、方便、高效的医学图像处理。
可以应用于多种领域,例如医疗、机械制造、建筑设计等。
值得注意的是,该方法中需要对切片图像进行多次处理,因此需要掌握一定的图像处理知识。
《三维重建-opencv实现sfm_一种基于OpenCV三维重建实现方案》摘要:极线约束应、特征检测与匹配定位精等般讲距离测量精与匹配定位精成正比与摄像机基线长成反比,3基V三维重建V[]采用定标方法是介传统定标方法和定标方法种方法由张正友其论[3]提出,得极线对图像上沿极线方向上像素进行灰相似性匹配能很方便出该对应图像上匹配摘要以计算机视觉三维重建技术研究对象分析了开放计算机视觉函数库V三维重建模型通六步骤,特别是摄像机标定和立体匹配极线约束方法使用给出了基V三维重建算法该算法充分发挥了V函数库功能提高了计算精效率具有良跨平台移植性可以满足各种计算机视觉系统要关键词计算机视觉;三维重建;V;摄像机标定;极线约束应、特征检测与匹配定位精等般讲距离测量精与匹配定位精成正比与摄像机基线长成反比增基线长可以改善深测量精但会增图像差异增加匹配困难程因要设计精确立体视觉系统必须综合考虑各方面因素保证各环节都具有较高精6处理[6]处理包括深插值、误差校正和精改善立体视觉终目是恢复景物可视表面完整信息目前无论哪种匹配方法都不可能恢复出所有图像视差因对完整立体视觉系统必须进行终表面插重建3基V三维重建V[]采用定标方法是介传统定标方法和定标方法种方法由张正友其论[3]提出这种方法不要知道摄像机运动具体信息这比传统定标技术更灵活仍要特定标定物以及组已知特征基元坐标这不如定标灵活它通至少3不位置获取标定物图像计算出摄像机所有外参数由它比传统定标技术更灵活又可以得到不错定标精所以被V所采纳这模型定标程将用到三坐标系图像坐标系摄像机坐标系和世界坐标系通坐标系变换可以通下面公式把图像坐标系和世界坐标系[7][8]由矩阵包含了摄像机全部6参数所以称摄像机参数矩阵模型外参数矩阵可以通以下公式得到三维重建难也是重要部分就是立体匹配部分V选用基特征匹配极线约束方法[9]假设空它两摄像机成像平面上投影分别和如图3所示其和分别两摄像机心即摄像机坐标系原极线几何我们称和连线基线基线和两摄像机成像平面交和分别两摄像机极它们分别两摄像机心和对应摄像机成像平面上投影坐标、和组成三角平面称极平面ππ和两摄像机成像平面交线l和l称极线般称l对应极线l对应极线l和l对应极线图3我们极平面π上另取′从图可以看到它两摄像机平面上投影和′其和′都极线l上这就是极线约束即当给定它匹配定出现它所对应极线上由可以将我们空压缩到维直线即极线上V可以先使用函数vl()出图像基础矩阵然用把得基础矩阵代入函数vrrl()函数出幅图像另幅图像对应极线得极线对图像上沿极线方向上像素进行灰相似性匹配能很方便出该对应图像上匹配实验结基上述原理和V函数利用V60开发了全套三维重建系统通上述6步骤终还原出了物体图形程序严格测试运行稳定进行相机标定要是照片越多(至少3幅)计算外参数就越精确而且其任两幅图像所对应摄像机光轴不能是平行图实验所用到左右对应图像图5提取到轮廓图6匹配程(图白标记对对应)图7重建效图(使用GL重建)5结束与展望三维重建视觉作计算机视种基V三维重建实现方案飞雪。
三维重建方法、三维重建模型的训练方法、装置及设备三维重建是指通过一系列的图像或传感器数据,将现实世界中的物体或场景转化为三维模型的过程。
在计算机视觉和计算机图形学领域,三维重建是一个重要的研究方向,广泛应用于虚拟现实、增强现实、机器人导航、医学影像等领域。
三维重建方法可以分为基于图像的方法和基于传感器数据的方法。
基于图像的方法主要利用多张二维图像来进行三维重建,常见的方法有立体视觉、结构光、多视角几何等。
立体视觉是指通过多个视角的图像来恢复场景的三维结构,常见的算法有立体匹配、三角测量等。
结构光是指通过投射特殊的光纹或光斑,利用相机捕捉到的图像来计算物体表面的深度信息,常见的算法有结构光三角法、相位移法等。
多视角几何是指通过多个视角的图像之间的几何关系来进行三维重建,常见的算法有多视角几何约束、三维重建优化等。
基于传感器数据的方法主要利用激光雷达、深度相机等传感器来获取场景的三维信息,常见的方法有激光雷达扫描、时间飞行相机等。
激光雷达扫描是指通过激光束扫描物体或场景,利用激光的反射时间来计算物体表面的距离信息,常见的算法有点云数据处理、三角网格生成等。
时间飞行相机是一种特殊的深度相机,通过测量光传播时间来计算物体表面的距离信息,常见的算法有相位差法、深度图像融合等。
除了以上基于图像和传感器数据的方法,还有一些其他的三维重建方法,如基于轮廓线、基于纹理等。
基于轮廓线的方法是指通过提取物体或场景的轮廓线来进行三维重建,常见的算法有轮廓线提取、曲线拟合等。
基于纹理的方法是指通过提取物体或场景的纹理信息来进行三维重建,常见的算法有纹理映射、纹理融合等。
在三维重建模型的训练方法方面,主要有监督学习和无监督学习两种方法。
监督学习是指通过已知的输入和输出样本对模型进行训练,常见的算法有支持向量机、神经网络等。
无监督学习是指通过无标签的输入样本对模型进行训练,常见的算法有聚类、降维等。
在装置和设备方面,三维重建通常需要使用计算机、相机、传感器等设备。
一种基于OpenCV的三维重建实现方案摘要本文以计算机视觉三维重建技术为研究对象,分析了开放计算机视觉函数库OpenCV中的三维重建模型,通过六个步骤,特别是摄像机标定和立体匹配中极线约束方法的使用,给出了基于OpenCV的三维重建算法。
该算法充分发挥了OpenCV的函数库功能,提高了计算的精度效率,具有良好的跨平台移植性,可以满足各种计算机视觉系统的需要。
关键词计算机视觉;三维重建;OpenCV;摄像机标定;极线约束1 引言三维重建技术是计算机视觉、人工智能、虚拟现实等前沿领域的热点和难点,也是人类在基础研究和应用研究中面临的重大挑战之一。
基于图像的三维重建是图像处理的一个重要研究分支,作为当今热门的虚拟现实和科学可视化的基础,它被广泛应用于检测和观察中。
一个完整的三维重建系统通常可分为图像获取、摄像机标定、特征点提取、立体匹配、深度确定和后处理等6大部分[1] [3]。
其中精确标定摄像机内外参数和立体匹配是三维重建中最重要也是最困难的问题。
开放源代码的计算机视觉类库OpenCV(Open Source Computer Vision Library)由英特尔公司位于俄罗斯的研究实验室所开发,它是一套可免费获得的由一些C函数和C++类所组成的库,用来实现一些常用的图像处理及计算机视觉算法[2]。
OpenCV与英特尔公司所开发的另一图像处理库IPL(Image Processing Library)兼容, IPL用于实现对数字图像的一些低级处理,而OpenCV则主要用于对图像进行一些高级处理,比如说特征检测与跟踪、运动分析、目标分割与识别以及3D重建等。
由于OpenCV的源代码是完全开放的,而且源代码的编写简洁而又高效,特别是其中大部分的函数都已经过汇编最优化,以使之能高效而充分地利用英特尔系列处理芯片的设计体系,对于Pentium MMX, Pentium, Pentium Ⅲ及Pentium Ⅳ这些处理器而言,OpenCV的代码执行效率是非常高的,所以近年来在国外的图像处理相关领域中被广泛地使用,成为一种流行的图像处理软件。