力法的基本概念
- 格式:doc
- 大小:1.26 MB
- 文档页数:11

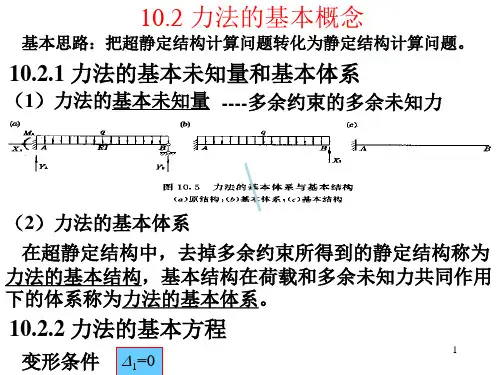
第二节 力法的基本原理及典型方程力法是计算超静定结构的最基本方法。
采用力法求解超静定结构问题时,不能孤立地研究超静定问题,而是应该把超静定问题与静定问题联系起来,即利用已经熟悉的静定结构计算方法来达到计算超静定结构的目的。
一、力法的基本原理这里先用一个简单的一次超静定结构为例来说明力法的基本概念,即讨论如何在静定结构的基础上,进一步寻求计算超静定结构的方法。
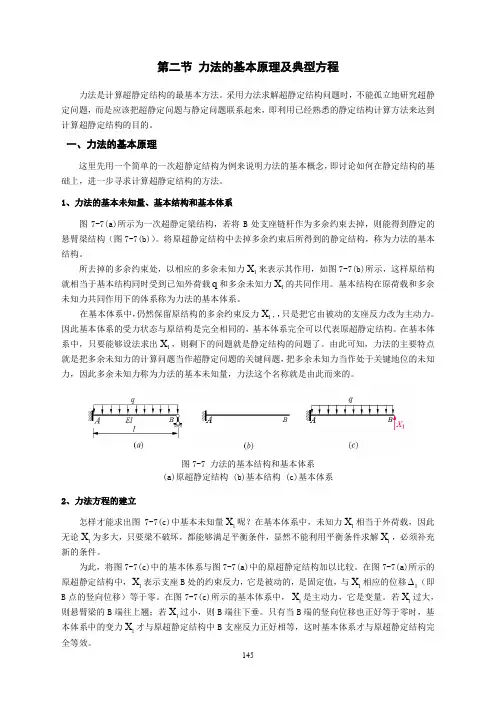
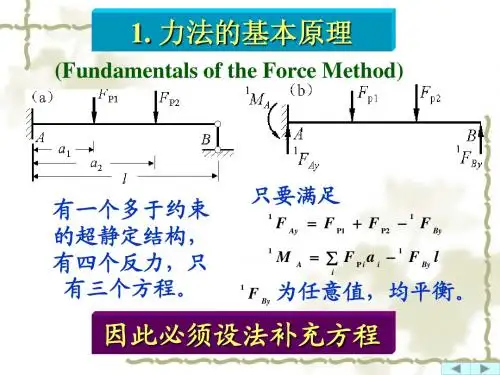
1、力法的基本未知量、基本结构和基本体系图7-7(a)所示为一次超静定梁结构,若将B 处支座链杆作为多余约束去掉,则能得到静定的悬臂梁结构(图7-7(b))。
将原超静定结构中去掉多余约束后所得到的静定结构,称为力法的基本结构。
所去掉的多余约束处,以相应的多余未知力1X 来表示其作用,如图7-7(b)所示,这样原结构就相当于基本结构同时受到已知外荷载q 和多余未知力1X 的共同作用。
基本结构在原荷载和多余未知力共同作用下的体系称为力法的基本体系。
在基本体系中,仍然保留原结构的多余约束反力1X ,,只是把它由被动的支座反力改为主动力。
因此基本体系的受力状态与原结构是完全相同的,基本体系完全可以代表原超静定结构。
在基本体系中,只要能够设法求出1X ,则剩下的问题就是静定结构的问题了。
由此可知,力法的主要特点就是把多余未知力的计算问题当作超静定问题的关键问题,把多余未知力当作处于关键地位的未知力,因此多余未知力称为力法的基本未知量,力法这个名称就是由此而来的。
图7-7 力法的基本结构和基本体系(a)原超静定结构 (b)基本结构 (c)基本体系2、力法方程的建立怎样才能求出图7-7(c)中基本未知量1X 呢?在基本体系中,未知力1X 相当于外荷载,因此无论1X 为多大,只要梁不破坏,都能够满足平衡条件,显然不能利用平衡条件求解1X ,必须补充新的条件。
为此,将图7-7(c)中的基本体系与图7-7(a)中的原超静定结构加以比较。
在图7-7(a)所示的原超静定结构中,1X 表示支座B 处的约束反力,它是被动的,是固定值,与1X 相应的位移1 (即B 点的竖向位移)等于零。

力法1概述1.1超静定结构我们学习了各种静定结构的计算方法,它们的支座反力和内力都可以由静力平衡条件全部唯一确定下来。
一个结构,如果它的支座反力和各截面的内力都可以用静力平衡条件唯一的确定,我们就称为静定结构,图1a所示简支梁就是一个静定结构。
一个结构,如果它的支座反力和各截面的内力不能完全由静力平衡条件唯一的确定,我们就称之为超静定结构,图1b所示的连续梁就是一个超静定结构。
(a)(b)图1从几何构造来看,静定结构是没有多余约束的几何不变体系,超静定结构是有多余约束的几何不变体系。
例如图1a所示的简支梁,如果我们去掉一个支杆B,它就变成了几何可变体系。
图1b所示的连续梁,如果我们去掉支杆C,体系仍然是几何不变的,所以,支杆C是多余约束。
而多余约束上产生的反力称为多余力。
可见,超静定结构的基本特点是:内力是超静定的,约束是有多余的。
1.2超静定次数超静定次数就是超静定结构中所具有的多余约束的数目,或者说多余未知力的数目。
在超静定结构中,由于具有多余约束力,使平衡方程的数目少于未知力的数目,所以仅靠平衡条件无法确定全部反力和内力,还必须考虑位移条件以建立补充方程。
一个超静定结构有多少个多余约束,相应的便有多少个多余未知力,也就需要建立同样数目的补充方程,才能求解。
因此,用力法计算超静定结构时,首先必须确定多余约束的数目。
确定超静定次数的方法,就是把给定的超静定结构通过去掉多余约束变为静定结构,所去掉的多余约束的数目就是超静定次数。
如去掉n个约束,就称原结构是n次超静定。
通过前面几何组成分析的学习我们知道:(1)去掉一个链杆支座或切断一根链杆的轴向联系,相当于去掉一个约束。
(2)去掉一个铰支座或去掉一个单铰,相当于去掉两个约束。
(3)去掉一个固定支座或切断一根受弯杆,相当于去掉三个约束。
(4)一个固定支座改为固定铰支座或将一个刚性联结改为单铰,相当于去掉一个约束。
图2 (a)所示连续梁,去掉右边两根链杆支座后,即变为静定结构。
力法求解技巧力法是指通过分析问题的关键要素和主要矛盾,利用各种力量的作用及其相互关系,找出解决问题的途径和方法的一种思维方法。
在问题解决过程中,我们可以使用力法来帮助我们全面思考,找到解决问题的最佳策略。
力法有以下几个基本原则:1.力量对立:力法认为,问题的解决往往需要对抗或平衡不同力量之间的对立。
在分析问题时,我们需要明确问题中的各个力量,并找出它们之间的矛盾和冲突。
只有深入了解问题的各个方面,找到力量对立的关键点,才能制定出有效的解决方法。
2.力量关系:力法强调力量之间的相互关系。
在问题解决过程中,我们需要考虑各个力量之间的影响和制约。
通过分析力量的相互作用,我们可以找到问题的矛盾点和解决问题的关键点。
了解力量之间的关系,有助于我们制定出解决问题的具体步骤和计划。
3.力量转化:力法认为,通过转化力量的作用和效果,我们可以解决问题。
在分析问题时,我们需要判断各个力量在不同情况下的作用和效果,并找出能够转化力量的有效方法。
通过转化力量,我们可以达到解决问题的目标。
在使用力法进行问题解决时,可以按照以下步骤进行:1.明确问题:首先,我们需要明确问题的性质和目标。
对于复杂问题,我们可以把它们分解成若干个子问题,以便更好地理解和分析。
2.分析力量:然后,我们需要分析问题中的各个力量,包括积极力量和消极力量。
我们可以找出各个力量之间的对立和冲突,并找出问题的矛盾点。
3.评估力量关系:接下来,我们需要评估各个力量之间的相互关系。
我们要考虑力量之间的制约和影响,以及力量的转化可能性。
4.找出解决方法:在理清各个力量之间的关系后,我们可以开始找出解决问题的方法。
我们可以尝试转化某些力量的作用和效果,或者通过调整力量的强度和方向来解决问题。
5.制定实施方案:最后,我们需要制定实施方案,明确解决问题的步骤和计划。
我们还需要考虑实施过程中可能出现的风险和困难,并寻找解决这些问题的方法。
在使用力法进行问题解决时,我们需要灵活运用各种分析方法和工具。
力法的基本概念
一、超静定结构和超静定次数
1.超静定结构的概念
①几何构造方面:有多余约束的几何不变体系。
②力学解答方面:方程的个数少于未知力的个数。
2.超静定次数的确定
去掉多余约束使超静定结构成为静定结构,所去掉的多余约束数目,就是超静定次数。
一般地,
*切断链杆(或支杆)是去掉了一个约束,相应一个约束力;
*拆开一个铰(或固定铰支座)是去掉了两个约束,相应两个约束力;*切端刚结点(或固定支座)是去掉了三个约束,相应三个约束力;*刚结点变为铰结点,是去掉了一个约束,相应一个约束力;
①
②③
二、力法的基本结构和多余未知力
1.超静定结构经过去掉多余约束后,变为静定结构,这个静定结构称为力法的基本结构。
去掉的多余约束所对应的约束力,称为力法的多余约束力。
基本结构、荷载与多余未知力合称基本体系。
2.基本结构的形式不唯一。
一般地,基本结构和多余未知力同时产生。
选取时,应使计算简单为前提。
前例题与练习中,给出了每个结构的部分基本结构和相应的多余未知力。
三、力法原理
1.基本假设:弹性小变形
2.确定超静定次数,选取恰当的基本体系
3.位移协调条件的确定(即,补充方程的建立)
4.计算柔度系数(单位未知力产生的位移),建立力法方程
5.结构内力的叠加公式
6.作内力图
示例1
P P
L X
L 基本体系
解:1)一次超静定结构,取基本体系如图所示。
2)基本思路
超静定结构用平面三个平衡方程是不够的。
注意到原结构在荷载作用下的内力和变形是唯一确定的,特别地,支座反力也是确定的。
因此,如果设X是支座反力,则原结构的内力与变形就与基本体系(其结构是静定的)在荷载P和支座反力X共同作用下的内力与变形等价。
这样,原超静定结构的计算就转化为静定结构的计算。
问题是,X是未知的。
需要考虑位移协调条件,即,补充方程。
显然,基本体系中,B端是自由端;而原超静定结构中却是有支座的。
要保证是等价关系,就必须保证基本体系在P和X共同作用下,在B 端的竖向位移是零。
其办法是:
在基本结构中,按叠加法把P和X的共同作用分别作用在基本结构上,
①荷载P作用下,在B端产生的竖向位移的计算
P P L
P=1
PL M P图L M 图
EI PL L PL L EI P 22113-
=⎪⎭
⎫
⎝⎛⨯⨯⨯-=∆ ②X 作用下在B 端产生的竖向位移计算
X X=1 P=1 L M 图 由于X 是未知的,由X 产生的位移X ∆X X ⋅∆==1=X ⋅δ 式中,δ是X=1时在B 端产生的位移。
其计算如图。
EI
L L L L L L L EI 34322113
=
⎪⎭⎫ ⎝⎛⋅⨯⨯⨯+⨯⨯=δ 即得:X ∆=X ⋅δ=X EI
L ⋅343
从而,位移协调条件就是:X ∆+0=∆P 即, X ⋅δ+0=∆P (力法方程,可解出X )
X=P ⋅8
3
(向上)
多余未知力解出后,原超静定结构的其余未知力可由平面三个平衡方程求得,结构内力也就可求。
3)内力图的作法
上述思路不仅限于求多余未知力,其内力有下列关系。
P
= + X M P 图 M X 图
X P M M M +==X M M P ⋅+ ,
X P V V V +==X V V P ⋅+ , X P N N N +==X N N P ⋅+
4)综上所述,在用力法求所给超静定结构时,所作的弯矩图最基本的有两个,M P图与M图。
分别表示:基本结构仅在荷载作用下的弯矩图,仅多余未知力等于1时的弯矩图。
P L
X=1 PL M P图L M图
M P图与M图图乘表示荷载P作用下在B端产生的竖向位移,M图自己与自己图乘表示多余未知力X=1时在B端产生的竖向位移。
5)把图放大X倍,与M P图叠加就得原结构的弯矩图。
示例2
q
L L
解:1)二次超静定结构。
2)基本体系取为多跨梁,并画出多余未知力。
3)基本思路
如果A 、B 处的弯矩X 1 ,X 2就是原结构在荷载作用下的弯矩,则原结构的内力可看作如下的叠加:
X 1 ,X 2未知,可先求X 1=1 ,X 2=1时的内力图。
4)位移协调条件
荷载q ,多余未知力X 1 ,X 2共同作用下,在A 截面产生的转角为零;在B 截面产生的相对转角为零。
5)荷载q 在A 截面、B 截面都要产生转角,记为P 1∆,P 2∆ ,求法如下:
作M P 图(荷载作用时基本结构的弯矩图)
1M 图(P=1时基本结构的弯矩图) 2M 图(P=1时基本结构的弯矩图)
01=∆P ,EI
qL qL L EI P
242183212
22=⨯⨯⨯=∆
6)X 1=1在A 截面、B 截面都要产生转角,记为11δ,21δ ,求法:
1M 图(P=1时基本结构的弯矩图) 2M 图(P=1时基本结构的弯矩图)
EI L L EI 332121111=⨯⨯⨯⨯=
δ ,EI
L L EI 631121121=⨯⨯⨯⨯=δ 7) X 2=1在A 截面、B 截面都要产生转角,记为12δ,22δ ,求法:
1M 图(P=1时基本结构的弯矩图) 2M 图(P=1时基本结构的弯矩图)
=12δEI L L EI 631121121=⨯⨯⨯⨯=
δ , EI
L
L EI 322)132121(122=⨯⨯⨯⨯⨯⨯=δ 8) 荷载q ,多余未知力X 1 ,X 2共同作用下,在A 截面产生的转角为零,即,
01212111=∆+⋅+⋅P X X δδ --------------(1)
荷载q ,多余未知力X 1 ,X 2共同作用下,在B 截面产生的相对转角为零,即
02222121=∆+⋅+⋅P X X δδ ---------------(2) 9)M 图的作法
由(1)、(2)式解出X 1 ,X 2 ,M 图可用叠加法作出。
2211X M X M M M P ⋅+⋅+= 10)把上述过程总结如下的简洁步骤: ① 确定超静定次数 ② 选取基本体系
③ 作M P 图,1M 图及2M 图,求出11δ ,12δ ,21δ ,22δ ,P 1∆ ,P 2∆
qL /8
1M 图 2M 图 ④ 求系数,写力法方程 ⎩⎨
⎧=∆+⋅+⋅=∆+⋅+⋅0
22221211212111P P X X X X δδδδ 解出X 1 ,X 2
⑤依2211X M X M M M P ⋅+⋅+=叠加出弯矩图。
由力法方程解得:2821qL X = ,14
2
2qL X -=
qL 2/14
qL 2 M 图
四、力法典型方程
由上两例不难得出力法计算超静定结构的典型方程如下 设结构为n 次超静定,选基本体系后有n 个多余未知力,X 1 ,X 2 ,...,X n 则
荷载P ,X 1 ,X 2 ,...,X n 各力都要在第i 个约束力处产生位移,由叠加原理,各力在第i 个约束力处产生位移∆为: i iP n in i i X X X ∆=∆+⋅⋅⋅⋅⋅⋅⋅+⋅+⋅δδδ2211 ,n i ,,2,1⋅⋅⋅⋅⋅= ----------(3) 式中,ij δ表示第j 个约束力为1时在第i 个约束力处产生的位移;
iP ∆表示荷载P 在第i 个约束力处产生的位移。
i ∆表示第i 个约束力处的
位移条件。
(3)式就是力法的典型方程。
即,
⎪⎪⎩⎪⎪⎨⎧∆=∆++⋅⋅⋅⋅++⋅⋅⋅⋅⋅⋅∆=∆++⋅⋅⋅⋅++∆=∆++⋅⋅⋅⋅++n
nP n nn n n P n n P n n X X X X X X X X X δδδδδδδδδ2211222222121111212111 练习:
按典型方程的思路,写出下列结构的力法方程。
L
L/2 L/2。