基本气动回路
- 格式:doc
- 大小:1.02 MB
- 文档页数:14


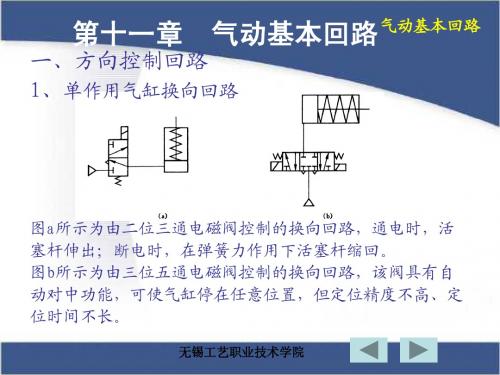


1.1 换向回路单作用气缸控制回路气缸活塞杆运动的一个方向靠压缩空气驱动,另一个方向则靠其他外力,如重力、弹簧力等驱动。
回路简单,可选用简单结构的二位三通阀来控制常断二位三通电磁阀控制回路通电时活塞杆伸出,断电时靠弹簧力返回常通二位三通电磁阀控制回路断电时活塞杆缩回,通电时靠弹簧力返回三位三通电磁阀控制回路控制气缸的换向阀带有全封闭型中间位置,可使气缸活塞停止在任意位置,但定位精度不高两个二位二通电磁阀代替一个二位三通阀的控制回路两个二位二通电磁阀同时通电换向,可使活塞杆伸出。
断电后,靠外力返回双作用气缸控制回气缸活塞杆伸出或缩回两个方向的运动都靠压缩空气驱动,通常选用二位五通阀来控制采用单电控二位五通阀的控制回路双电控阀控制回路采用双电控电中间封闭型三位五通阀控制回路中间排气型三位五通阀控制回路路通电时活塞杆伸出,断电时活塞杆返回磁阀,换向信号可以为短脉冲信号,因此电磁铁发热少,并具有断电保持功能左侧电磁铁通电时,活塞杆伸出。
右侧电磁铁通电时,活塞杆缩回。
左、右两侧电磁铁同时断电时,活塞可停止在任意位置,但定位精度不高当电磁阀处于中间位置时活塞杆处于自由状态,可由其他机构驱动中间加压型三位阀控制回路电磁远程控制回路采用二位五通气控阀作为主控阀,其先导控制压力用一个二位三通电磁阀进行远程控制。
该回路可以应用于有防爆等要求的特殊场合双气控阀控制回路主控阀为双气控二位五通阀,用两个二位三通阀作为主控阀的先导阀,可进行遥控操作当左、右两侧电磁铁同时断电时,活塞可停止在任何位置,但定位精度不高。
采用一个压力控制阀,调节无杆腔的压力,使得在活塞双向加压时,保持力的平衡采用带有双活塞杆的气缸,使活塞两端受压面积相等,当双向加压时,也可保持力的平衡双作用气缸控制回路采用两个二位三通阀的控制回路采用一个二位三通阀的差动回路带有自保回路的气动控制回路两个二位二通阀分别控制气缸运动的二位四(五)通阀和二位二通阀串接的控制回路两个二位三通阀中,一个为常通阀,另一个为常断阀,两个电磁阀同时动作可实现气缸换向气缸右腔始终充满压缩空气,接通电磁阀后,左腔进气,靠压差推动活塞杆伸出,动作比较平稳,断电后,活塞自动复位两个方向。
1.1 换向回路单作用气缸控制回路气缸活塞杆运动的一个方向靠压缩空气驱动,另一个方向则靠其他外力,如重力、弹簧力等驱动。
回路简单,可选用简单结构的二位三通阀来控制常断二位三通电磁阀控制回路通电时活塞杆伸出,断电时靠弹簧力返回常通二位三通电磁阀控制回路断电时活塞杆缩回,通电时靠弹簧力返回三位三通电磁阀控制回路控制气缸的换向阀带有全封闭型中间位置,可使气缸活塞停止在任意位置,但定位精度不高两个二位二通电磁阀代替一个二位三通阀的控制回路两个二位二通电磁阀同时通电换向,可使活塞杆伸出。
断电后,靠外力返回双作用气缸控制回路气缸活塞杆伸出或缩回两个方向的运动都靠压缩空气驱动,通常选用二位五通阀来控制采用单电控二位五通阀的控制回路通电时活塞杆伸出,断电时活塞杆返回双电控阀控制回路采用双电控电磁阀,换向信号可以为短脉冲信号,因此电磁铁发热少,并具有断电保持功能中间封闭型三位五通阀控制回路左侧电磁铁通电时,活塞杆伸出。
右侧电磁铁通电时,活塞杆缩回。
左、右两侧电磁铁同时断电时,活塞可停止在任意位置,但定位精度不高中间排气型三位五通阀控制回路当电磁阀处于中间位置时活塞杆处于自由状态,可由其他机构驱动中间加压型三位阀控制回路电磁远程控制回路采用二位五通气控阀作为主控阀,其先导控制压力用一个二位三通电磁阀进行远程控制。
该回路可以应用于有防爆等要求的特殊场合双气控阀控制回路当左、右两侧电磁铁同时断电时,活塞可停止在任何位置,但定位精度不高。
采用一个压力控制阀,调节无杆腔的压力,使得在活塞双向加压时,保持力的平衡采用带有双活塞杆的气缸,使活塞两端受压面积相等,当双向加压时,也可保持力的平衡主控阀为双气控二位五通阀,用两个二位三通阀作为主控阀的先导阀,可进行遥控操作双作用气缸控制回路采用两个二位三通阀的控制回路两个二位三通阀中,一个为常通阀,另一个为常断阀,两个电磁阀同时动作可实现气缸换向采用一个二位三通阀的差动回路气缸右腔始终充满压缩空气,接通电磁阀后,左腔进气,靠压差推动活塞杆伸出,动作比较平稳,断电后,活塞自动复位带有自保回路的气动控制回路两个二位二通阀分别控制气缸运动的两个方向。
气动基本回路气动常用回路气动基本回路是指通过气动元件和管路构成的气动系统中的基本回路。
气动常用回路是指在工业自动化控制系统中经常使用的一些气动回路。
本文将介绍气动基本回路和气动常用回路的一些概念和应用。
气动基本回路主要包括气源回路、执行回路和控制回路。
气源回路是指气动系统中提供压缩空气的部分,通常包括压缩空气发生器、气源处理装置和储气设备。
执行回路是指通过气动执行元件来实现机械运动的部分,通常包括气缸和气动执行阀等。
控制回路是指用来控制执行元件的控制系统,通常包括开关、传感器和控制阀等。
气动常用回路包括单向气缸回路、双向气缸回路、速度控制回路、位置控制回路、压力控制回路等。
单向气缸回路是指通过一个气缸来实现单个工作机构的运动控制,常用于一些简单的工作场合。
双向气缸回路是指通过两个气缸来实现工作机构的正反转运动控制,常用于一些需要双向运动的工作场合。
速度控制回路是通过调节气缸的进气量来实现对气缸运动速度的控制,常用于一些对速度要求较高的工作场合。
位置控制回路是通过使用位置传感器来检测工作机构的位置,并通过控制阀来调节气缸的进气量,从而实现对工作机构位置的控制。
压力控制回路是通过使用压力传感器来检测气缸的压力,并通过控制阀来调节气缸的进气量,从而实现对气缸压力的控制。
气动基本回路和气动常用回路在工业自动化控制系统中具有广泛的应用。
其优点包括响应速度快、动力强、结构简单、成本低廉等。
因此,在许多工业领域中,气动系统被广泛应用于各种自动化生产线、机械设备和工艺控制系统中。
气动基本回路和气动常用回路是工业自动化控制系统中常用的回路类型。
通过对气源回路、执行回路和控制回路的合理设计和配置,可以实现对工作机构的运动控制、速度控制、位置控制和压力控制等功能。
气动系统具有快速响应、动力强大、结构简单、成本低廉等优点,因此在工业领域中具有广泛的应用前景。
基本气动回路————————————————————————————————作者:————————————————————————————————日期:第5章基本回路前言我们的最终目的是利用气压机器进行某种工作。
在这一章里学习气压气缸和方向控制阀的基本气压回路。
以泛用气压回路的復动气缸为例,解释气压回路的基本组合方法。
另外,复动气缸基于以下的理由,气压回路被广泛地使用。
・可以分别控制前进和后退的速度。
・调整气压确保气缸的前进后退工作。
・可以用不定数的复动气缸构成多方位气缸。
・通过同电磁阀的组合,充分地利用气压气缸的机能。
1.工作转换回路5孔阀是用于改变复动气缸的回路时,所使用的主要方向阀。
1-1.用5孔阀转换回路5孔电磁阀〈1〉线圈被通电激磁后,气缸〈2〉活塞杆侧的压缩空气被排放,同时输进活塞杆反面的压缩空气推动活赛运动,使活塞杆前伸。
电磁阀〈1〉被消磁后,活塞杆会进行后退。
②①5孔阀P图5-1复动气缸的基本≪〈注意〉复动气缸的速度,是按4孔,或5孔的电磁阀的大小,气缸的气道径,配管管路阻力和流进气缸内的空气量来决定。
如果在不进行速度控制时,动作速度快,有可能损害装置和机器。
因此气缸〈2〉使用有缓冲装置的气缸。
最好是在高速运转时,从外部使用缓冲器。
1-2.使用2位.3孔阀的转换回路使用2个3孔阀(固定开放)代替4孔或者5孔阀,表示操作复动气缸的回路。
※ 解说电磁阀〈1〉励磁后,气缸杆会进入(后退);在断开①〈1〉的同时励磁电磁阀〈2〉的话,气缸杆前进。
《注意》此气压回路,因3孔电磁阀可以设置在气缸孔的附近,应在气缸容量超大,需要节约配管内的空气时使用。
1-3.使用2孔阀切换回路※解说使电磁阀〈1〉和〈4〉励磁,不让电磁阀〈2〉②和〈3〉③励磁的话,气缸杆露出(前进)。
或者,不让电磁阀〈1〉①和〈4〉励磁,使电磁阀〈2〉②和〈3〉励磁③的话,气缸杆回后退。
③④①②2.复动气缸的速度控制回路用5孔阀的速度控制阀的速度控制回路在使用速度控制阀,控制气缸的活塞速度时,其配管方法如图5-2所示;气缸的排气有出口节流和进口节流两种方法。
一般采用出口节流。
《特征》出口节流控制,由于对排气侧进行节流控制,所以,不容易出现蠕动现象。
由于对负荷变动具有稳定性,从速度控制特性出发,这种方式被广泛使用。
相反,进口节流控制,由于气缸侧室接近大气压,所以,很容易出现蠕动现象。
另外,速度特性也不好。
但是采用这种方式在〈a 〉 出口节流回路〈b 〉 进口节流回路图5-2复动气缸的速度控制回【 动作说明 】出口节流进口节流(1) 向〈1〉①自由的流动,气压会立刻升高。
(2) 在〈2〉空气出口被节流,排气速度受限制。
(3) 用〈1〉和〈2〉差压进行推动,活塞可以比较顺利地运动。
(4) 但因气体据有压缩性,很难完全控制活塞的自走。
(1) 由于是在进口节流,〈1〉的升压慢。
(2) 向〈2〉①自由的流动,气压会立刻降低。
(3) 〈1〉和〈2〉的压力会失去平衡,活塞运动变得很不稳定。
(4) 随着活塞的堕性运动,〈1〉的压力不安定,活塞会产生动一下,停一下的蠕动现象。
的差压一定 顺利控制流速度控制阀自由流自由流控制流运动不安定一定程度上可以节省空气的消费量。
ﻬ3.基本回路气压机器的基本构成例如图5-3所示。
将图5-3的气压机器构成用表示记号标志的话,如图5-4所示。
3-1.引导操作回路图5-4所示的是用电磁阀操作气缸的回路图,用空气工作阀代替电磁阀时,如 图5-5所示。
图5-4 基气压源节流阀 加油器方向控制阀过滤器速度控制阀气压马达图5-5 引导操作方向控制阀 (空气工作阀)引导阀(手动操作阀)图5-3基本机器构节流阀F .R .L .unit过滤器加 油 器方向控制阀速度控制阀气 缸ﻬ3-2.回路例(1) 用手动把柄进行1个往返的回路按动按钮A 气缸D向前伸出,按动按钮B气缸返回原位的回路。
如图5-6所示;按动按钮A 压缩空气变成气压信号流动传给空气工作阀转换C,转换空气工作阀C 后,气缸柱向前伸出。
还有,转换空气工作阀C后,即使放开操作按钮A,因空气工作阀保持着工作状态,气缸的活塞杆会停在前面顶部。
(2) 单向冲程回路按动按钮A 气缸D 伸出到前端,之后再返回原位的回路。
如图5-7所示,按动按钮A 压缩空气变成气压信号流动转换空气工作阀B 。
转换B工作阀后气缸柱D向前伸出。
气缸杆伸出到前端后,会起动机械工作阀C,压缩空气变成气压信号流动转换空气工作阀B 。
转换工作阀后,气缸D的活塞杆返回原位,在后端停止。
ACDBグACDB图5-6用手动把柄进行1个图5-7单向冲(3) 手动把柄的连续往返回路转换手动把柄A 后,气缸G 进行连续往返的回路。
如图5-8所示;转换手动把柄A 后,空气信号通过机械工作阀C 转换空气工作阀B,气缸G 的活塞杆向前伸出。
活塞杆伸出到前端时,压动机械工作阀D,压缩空气变成气压信号流动转换空气工作阀B。
转换空气工作阀B后,气缸G 的活塞杆再次开始向前伸出。
如此只有在打开手动把柄A 时,活塞会持续进行往返运动。
气缸的前伸和后退速度用速度控制开关F来调解。
(4) 使用梭子阀的回路图5-9是在图5-7用手动把柄进行1个往返的回路上,追加3孔电磁阀E 和梭子阀F的回路。
按动按钮A或转换3孔道电磁阀E时,压缩空气变成气压信号流动转换空气工作阀B ,气缸D 的活塞杆向前伸出。
这个回路,一般都把手动和自动操作并用起来使用。
图5-8连续BACDBEF图5-9使用梭子阀GAE FCD(5) 快速排气阀的回路图5-10是在图5-7用手动把柄进行1个往返的回路上追加快速排气阀D,加快气缸返回速度的回路。
在气缸D 和空气工作阀B 配管的中途装上快速排气阀E,气缸盖侧的压缩空气不通过空气工作阀B,会被立刻排到大气之中。
使用这个阀门,会减轻气缸的背压,增加气缸的运动速度。
ﻬ4.气压指令序列控制4-1. 概要指令序列控制,是自动化及节能的旗手,不论规模大小,在各个产业界和领域上发挥着其使命。
最近被广泛地使用于气压控制,电气控制,和电子控制领域上。
4-2.什么叫指令序列控制 ?所谓指令序列控制,「按事前设定好的程序,阶段性地进行控制。
」就是说;指令序列控制是事先设定下一个动作,在上一个动作完了后,按其结果和目的,设定和组合下一个动作。
作为简单的例可以举洗衣机的例;4-3.气压控制的特征① 一般来说,用即有的部件,可以组合构成多种回路。
② 可以简单地连接增幅器和操作机器。
给水 洗涤 排外 脱水 给水洗涤 排 水脱终 了图5-10 使用快速排EACDB③ 在多种回路上可以应用共通的技术。
④ 可有效地使用在易发生因电气部件的短路引起爆炸和火灾装置上。
4-4.气压控制机器的构成按钮 接力开关 主开关 气缸 空气极限 梭子开关 按钮 气压马达延时开关ﻬ4-5.气压控制机器的用语和内容◆ 信号机器用手动,或机械来操作物体开关的总称,用外部的力量来传送信号。
◆ 中转机器接收从信号机发出的气压信号情报,进行既定的指令序列演算后,把信号输送给增幅器。
◆ 增幅机器接收从信号机和中转器发出的信号,驱动气缸,和气压马达等传动装置。
5.电气控制方式和气压控制方式的比较1) AN D回路例这个回路同时按(PB )1・2按钮时,电灯会发亮的回路。
2) OR 回路例信号系统驱动系统信号机器 传动装置增幅机器 中转机器 RPPRP A B IOIRPPP AB R图-1 图-2PB1PB2CRCR SPB1PB2SPB1PB2 CRPB1PB2图-1图-2这个回路在按1・2任何一个按钮时,电灯都会发亮的回路。
3) NOT 回路这个回路是从按钮1没有信号输入时会输出,有信号输入时不进行输出的回路。
4) NAN D回路(否定理论积)这个回路是从按钮1・2没有得到输入信号时得不到输出的回路。
5) NOR 回路(否定理论和)这个回路是从按钮1或者2得到输入信号时得不到输出的回路。
PB1 图1 图2 PB1 S 图2图1 PB1 PB2 CR CR S S PB1 PB2 PB2 PB1 S S PB1 PB2 图1 图2PB2 CR PB1 CR S S PB1 PB26) 触发器回路(自己保持回路)这个回路是从按钮1或者2得到输入后转换输出,即使切断输入到有复位为止保持输出的回路。
7) 联锁回路(手动操作时)根据装置任意地进行单独操作,会影响或损坏其它传动装置或引起意外事故。
为了防止意外事故的发生有必要设置联锁器。
例)只有在气缸B 后退时,气缸A才可以工作。
气缸A 气缸 PB1 PB2 图图S1 PB1 PB2 S2 PB1 CR S1 CR S2 CR CR S28)停止回路下面的回路是在运转中,按下停止开关在工作中的气缸会停止在任何一个冲程的端部停止工作,之后保持停止状态。
在按复位开关后气缸会从停止位置开始继续往复动作的回路。
*按停止按钮会停止供气*按复位按钮后开始往控制系统供气。
停止复位。