嵌入式机器视觉系统设计
- 格式:pdf
- 大小:124.20 KB
- 文档页数:3
嵌入式机器视觉系统设计摘要:嵌入式系统在机器视觉中取得了很大的发展,大大提高了人们的生活质量。
嵌入式系统最大的特点就是低功耗和便携性,这为产品小型化和集成化发展奠定了坚实的基础。
本文主要探究了嵌入式系统在机器视觉中的相关应用,希望给相关人员一定的启示作用。
关键词:嵌入式系统;机器视觉前言嵌入式系统一般需要部署在资源平台受限且能够完成并行计算的平台之上。
一般需要单片机给它提供强大的运算和控制能力,从而对于相关数据进行相应的搜集、传输、计算以及分析,在完成计算之后需要向相应的执行单元发送控制指令,从而完成相应的控制任务。
一般的嵌入式系统需要部署在一个具体的资源平台上,能够使得嵌入式系统能够更好实现产业化、集成化以及规范化,从而更好地发挥嵌入式系统在工业系统的潜力。
经过多年的发展,嵌入式系统已经发展十分成熟了,将嵌入式系统应用在机器视觉系统当中,对于提高系统稳定性和安全性发挥着至关重要的作用,同时还能够降低嵌入式系统的功耗。
1.嵌入式系统发展概述嵌入式系统一种常见的处理单元是基于单片机技术,在嵌入式系统中能够部署相应的传感器、控制器以及相应的控制算法的数字系统。
这种系统能够完成相应的专用任务,嵌入式系统主要包括了中央处理处理单元(单片机)、硬件设备(传感器和执行器),以及相应的实时操作系统(u-cos系统),具有通信控制、数据分析和管理等功能。
它的核心是单片机设备,能够对于相应的数据进行有效的分析和计算,不同型号的单片机的计算能力不同,对于不同控制任务所需要的单片机也要求不同。
一般的嵌入式系统逐渐朝着小型化、智能化和集成化的方向发展,一个系统往往都是需要集成在一个很小的模块上,往往是为了更好满足人们的需求。
2.嵌入式系统开发设计基于嵌入式系统的软件开发环境主要是一些集成开发工具以及相应的硬件设计工具和软件,在实际开发一个嵌入式系统过程中需要立足于实际的项目,基于项目需求来进行软件硬开发,在满足设计要求的基础上,要尽可能提高开发的经济性和系统可靠性。

基于ARM嵌入式系统的机器视觉应用研究机器视觉是图像处理、机器学习、计算机视觉等多个领域的综合应用,是人工智能技术应用的重要方向之一。
它不仅应用于工业自动化、医学影像等领域,也从日常生活中的人脸识别、手势识别、图像搜索等方面渗透到我们的生活中。
而基于ARM嵌入式系统的机器视觉应用研究,则是该领域内的一项重要研究。
一、ARM嵌入式系统的特点ARM嵌入式系统具有体积小、功耗低、低成本等特点,因此在嵌入式应用领域得到了广泛应用。
ARM嵌入式系统还具有配置灵活、可集成性好等特点,因此可以通过对其加入各类传感器和相关的硬件模块,从而实现各种应用需求。
二、基于ARM嵌入式系统的机器视觉应用在人工智能技术应用领域,基于ARM嵌入式系统的机器视觉应用主要有以下几个方面:1、人脸识别人脸识别技术是指通过计算机获取人脸图像信息,并在数据库中进行比对,从而实现人员身份识别。
采用基于ARM嵌入式系统的人脸识别系统,可以实现快速、准确的人脸识别功能,因为它具有响应速度快、高集成性、低功耗等特点。
常见的嵌入式人脸识别系统使用深度学习算法,如卷积神经网络。
2、智能家居通过基于ARM嵌入式系统的智能家居系统,可以实现家居设备的自动控制、智能化控制和监控等功能。
例如,嵌入式系统与传感器相结合,可以实现智能温湿度监测、智能家电控制,从而实现智能家居的控制和管理。
3、无人驾驶无人驾驶技术是一种基于人工智能技术的自主驾驶系统,通过嵌入式系统实现智能的驾驶辅助系统,提高驾驶安全性和效率。
例如,嵌入式系统可以通过图像处理算法和传感器识别路况和交通情况,从而提供自动驾驶的支持。
4、医疗影像处理在医疗影像领域,基于ARM嵌入式系统的机器视觉应用可以实现医疗影像的处理和分析。
例如,可通过嵌入式系统实现自动化的医学图像分割、心电图分析等,从而提高医疗诊断的准确性和效率。
三、未来展望随着人工智能技术在各行各业的深入应用和发展,基于ARM嵌入式系统的机器视觉应用也将得到进一步的发展和壮大。
基于Linux的嵌入式视觉系统设计
1 引言
视觉系统在现代工业生产自动化系统中应用非常广泛,主要集中于药品检测分装、印刷色彩检测、集成电路生产、精密电子产品装配、智能机器人识别导航等领域。
随着Internet 的普及,现代社会已进入后PC 时代,嵌入式技术越来越与人们的生活紧密结合。
嵌入式视觉系统可通过USB 总线等将图像的获取、图像处理、显示设备集成于一体,成本相对较低,体积小巧,可以方便地安装在载体身上,故研究嵌入式的视觉系统具有一定的实际意义。
2 嵌入式视觉系统总体方案设计
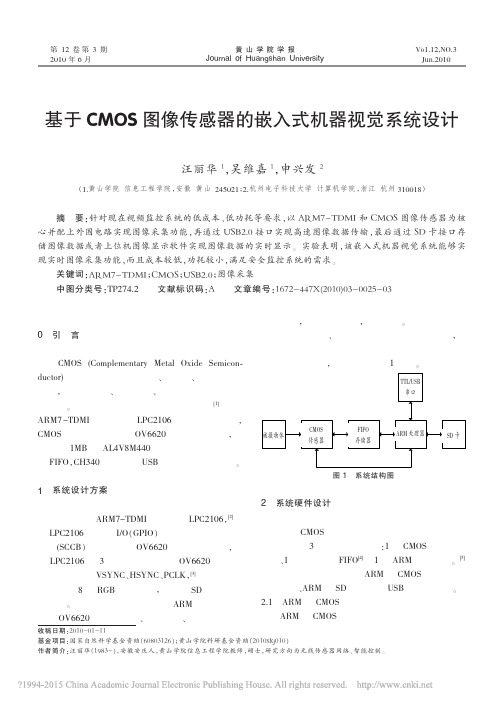
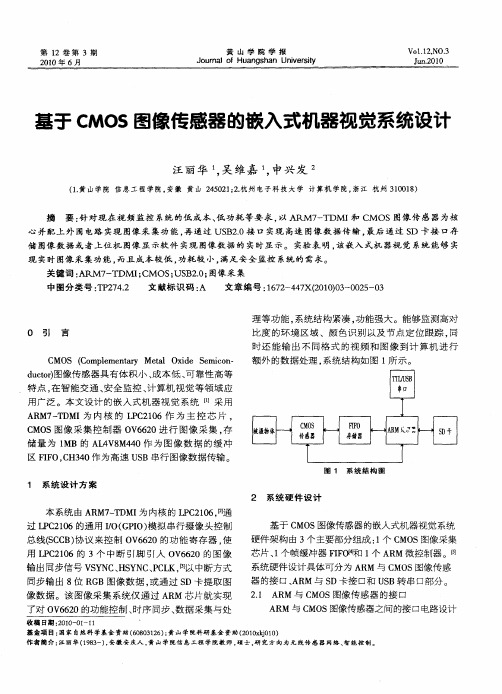
嵌入式视觉系统由嵌入式硬件平台、操作系统、图像采集和图像显示四大部分组成,原理框图如下图1 所示。
采用TMS320DM8168芯片的嵌入式机器视觉系统的设计引言机器视觉系统,是一种非接触式的光学传感系统。
它同时集成软硬件,能够自动地从所采集到的图像中获取信息或者产生控制动作。
自起步发展到现在,机器视觉已有15年的历史,主要经历了数字电路组成、PC机和输出设备组成、嵌入式三个阶段,其中,嵌入式机器视觉系统依托专业计算机技术,具有实时多任务操作系统、高效压缩芯片和功能强大的微处理器,可将视频压缩、传输与处理工作全部内置到芯片上,通过内部处理后可以直接连入以太网或广域网,完成网络实时远程监控,是目前的研究热点之一。
在国内外研究中,嵌入式机器视觉系统实现方式主要有三种:(1)基于标准总线,采用DSP作为运算和控制处理器的系统。
DSP芯片虽然能够处理大量信息和高速运行,但其I/O接口单一,不易扩展,控制能力较弱,尚存在一定局限性。
(2)基于DSP+FPGA 的机器视觉系统。
FPGA 与DSP的结合,可实现宽带信号处理,大大提高信号处理速度,但FPGA 使用的是硬件描述语言,其算法开发具有很大的难度,功能实现由硬件控制,系统受环境影响较大。
(3)采用ARM微处理器或采用ARM+DSP构建方式的机器视觉系统,这种构建方式人机交互功能强大,集成度高、实时性好、支持多任务,但该系统中ARM 与DSP的数据交换方法仍采用外部电路连接,增加了系统的不稳定性。
综合上述技术方案的优点和缺点,本文提出了一种新型机器视觉系统,实现图像信息的高速采集与存储。
其核心芯片选取TI公司最新生产的先进的双核嵌入式芯片,将ARM处理器和DSP处理器集成在一个芯片中,通过软件编程即完成ARM与DSP的协调工作。
由该芯片构建开发的机器视觉处理系统,凭借植入Linux系统的ARM 处理器的优异的控制性能,配合DSP 的强大运算处理能力将保证系统拥有良好的实时性和稳定性,可以为机器视觉的研究和应用提供很好的视频采集与处理硬件平台。
嵌入式系统中的机器视觉与工业自动化技术嵌入式系统是一种专门设计用于特定任务的计算机系统,其核心特点是紧凑、高效、低功耗。
而机器视觉和工业自动化技术则是嵌入式系统中非常重要的一部分,它们使得嵌入式系统能够在工业制造、物流领域等各种应用中发挥重要作用。
本文将介绍机器视觉与工业自动化技术在嵌入式系统中的应用以及其所带来的好处。
机器视觉是利用计算机视觉技术实现的自动化工业领域中的一种技术。
通过摄像头及其它传感器,机器视觉可以获取图像,然后通过图像分析和处理,对产品的质量进行检测、测量或其他相关的操作。
在嵌入式系统中,机器视觉可以广泛应用于产品质量控制、目标检测与识别、机器人导航等方面。
首先,机器视觉在产品质量控制方面发挥了重要作用。
传统的质检需要大量的人工参与,而且容易出现疲劳、漏检等问题。
而利用机器视觉技术,可以实现对产品表面、尺寸、颜色等特征的自动检测和判定。
通过优化算法和硬件设计,嵌入式系统可以实现实时、高效的产品质检,大大提高了生产效率和质量稳定性。
其次,机器视觉在目标检测与识别方面也有广泛的应用。
在工业自动化中,往往需要对不同类型的目标进行分类、识别和追踪。
通过机器视觉技术,嵌入式系统可以对目标进行特征提取和匹配,实现对目标的自动检测与识别。
例如在物流行业,利用机器视觉可以实现对货物的识别和追踪,大大提高了运输效率和准确性。
此外,机器视觉技术还可以应用于机器人导航。
在自动化仓库、生产线等环境中,机器人扮演着越来越重要的角色。
然而,机器人需要准确了解周围环境并进行路径规划才能完成任务。
通过嵌入式系统中的机器视觉技术,可以为机器人提供环境感知和导航能力。
机器视觉可以实现对环境地图的构建和更新,利用地图和传感器数据进行实时路径规划和避障。
这使得机器人能够更加可靠地完成任务,提高工作效率。
通过上述应用可见,机器视觉与工业自动化技术在嵌入式系统中的应用极为广泛,并且带来了巨大的好处。
首先,机器视觉技术可以提高质量控制的效率和准确性,避免了人为因素对质检结果的影响。
嵌入式机器视觉与控制系统设计第一章:嵌入式机器视觉与控制系统概述嵌入式机器视觉与控制系统是一种利用人工智能、图像处理、控制系统等技术,将系统嵌入到硬件中,实现对物体进行识别、检测、跟踪、控制等操作的技术。
其主要应用于智能制造、自动化生产线、机器人等领域。
嵌入式机器视觉与控制系统设计是一个综合性的工程,需要涵盖硬件设计、软件开发、图像处理算法、控制算法等多个方面。
第二章:嵌入式机器视觉与控制系统设计的硬件部分嵌入式机器视觉与控制系统设计的硬件部分包括主控制板、图像采集板、通信模块等几个基础模块。
其中,主控制板是整个系统中的核心,负责对整个系统进行调度、控制;图像采集板负责对物体进行采集、处理,将图像数据转换为数字信号传输给主控制板;通信模块负责将整个系统与外部设备进行连接,以实现系统的无线控制。
第三章:嵌入式机器视觉与控制系统设计的软件部分嵌入式机器视觉与控制系统设计的软件部分包括嵌入式操作系统、驱动程序、应用程序等多个方面。
其中,嵌入式操作系统是整个系统中的核心,负责对资源进行管理、调度;驱动程序负责控制各个硬件设备的操作和数据采集;应用程序负责进行图像处理、目标识别、跟踪等操作。
第四章:嵌入式机器视觉与控制系统设计中的图像处理算法嵌入式机器视觉与控制系统设计中的图像处理算法包括目标识别、跟踪、避障等多个方面。
其中,目标识别算法是整个系统的核心,其基础算法包括特征提取、分类器等;跟踪算法负责对物体进行动态跟踪;避障算法则主要应用于机器人等自主移动设备中。
第五章:嵌入式机器视觉与控制系统设计中的控制算法嵌入式机器视觉与控制系统设计中的控制算法包括位置控制、力控制等多个方面。
其中,位置控制算法主要应用于机器人等设备的导航和定位;力控制算法则主要应用于机械臂等设备的运动控制。
第六章:嵌入式机器视觉与控制系统设计的实现过程嵌入式机器视觉与控制系统设计的实现过程主要分为原型设计、测试验证、系统集成三个过程。
基于DSP的嵌入式机器视觉模块设计及系统组建的开题报告一、选题背景随着智能制造、自动化生产的发展,机器视觉技术在工业自动化和产品质量控制中得到了广泛的应用。
嵌入式机器视觉系统可以实现对产品的检测、分类、计数、定位等任务,提高生产线的效率和自动化程度,减少人工质量控制的成本。
本课题以嵌入式DSP为平台,结合机器视觉算法,设计并实现嵌入式机器视觉模块,并将其应用于工业自动化中。
二、研究内容1. DSP嵌入式系统的搭建选用TI公司的TMS320F28379D芯片作为DSP嵌入式系统的核心,搭建嵌入式系统开发环境,包括CCS软件、JTAG模块,完成DSP芯片的烧录和调试,实现系统的稳定运行。
2. 图像采集模块设计采用USB摄像头采集图像数据,通过DSP芯片的DMA通道将数据传输到SDRAM中存储,并采用双缓存机制保证数据的连续性。
图像采集模块还需要考虑光照、曝光度等因素,以尽量获得高质量的图像。
3. 机器视觉算法实现选用OpenCV库中的图像处理算法,设计图像预处理、特征提取、分类识别等算法,并将其移植到嵌入式DSP系统上实现。
算法需要考虑嵌入式环境下的资源限制,以达到较高的算法效率和正确率。
4. 系统集成和测试将图像采集模块和机器视觉算法模块集成到DSP嵌入式系统中,并完成系统的接口设计和测试。
通过实验验证系统的性能和可靠性,分析系统存在的问题和不足,并提出优化方案。
三、研究意义本课题的研究成果可以应用于工业自动化、智能制造等领域,实现对产品的高效快速检测、分类、计数、定位等任务,提高生产效率和产品质量,减少人工成本。
同时,本研究可促进DSP芯片在嵌入式系统中的应用,扩大其应用领域和市场影响。
四、研究方法通过文献调研和实验方法相结合,选择合适的算法和工具,完成系统的搭建、算法实现和测试。
并结合实际应用场景,优化系统的设计和算法性能。
五、进度安排前期:文献调研、系统设计和环境搭建。
中期:图像采集模块和机器视觉算法模块的实现和集成。
嵌入式机器视觉系统设计熊 超 田小芳 陆起涌(复旦大学电子工程系 上海 200433)摘要 机器视觉系统是智能机器人的一个重要标志,也是近年来的一个研究热点,现有研究成果在系统复杂度、价格和性能之间很难达到平衡。
针对此问题,设计了一个CM O S摄像头为图像采集设备、DM CU为核心处理器的嵌入式机器视觉系统,并实现了实时双目测距。
该系统简单、实时性好。
关键词 嵌入式系统 DM CU 机器视觉 双目测距The Design of Embedded Machine Vision SystemXiong Chao Tian Xiaofang Lu Qiyo ng(E.E.D ep ar tment,F udan U niv er sity,Shanghai200433,China)Abstract M achine vision is an act ive research area in recent years,which is an import ant symbol of intelligent robot,but t he present research product ion has not f ound a balance among the system complexit y,cost and per-formance.T o solve the problem,a new embedded machine vision system is proposed,which t akes t he CM OS sense as the image acquisit ion unit and DM CU as cent ral processor,and real-time depth measurement is realized. T he system is simple and st able,and has a good perf ormance in real-time operation.Key words Embedded syst em DM CU M achine vision Binocular dept h measurement1 引 言机器视觉系统是智能机器人的一个重要标志,其模拟了人的感知功能,具有探测范围宽、目标信息完整等优势,因此越来越受到人们的关注。
其中,机器视觉测量障碍物距离是近年来的研究热点,并取得了一定的效果[1~3]。
但这些视觉测距系统往往比较复杂、价格高,或者实时性差。
在此设计了一个以CM OS摄像模块为图像采集设备、DM CU为核心处理器的嵌入式机器视觉系统,并实现了双目视觉实时测距。
该系统集成度高、功耗低、实时性好,还有丰富的外围接口,可以广泛应用于智能机器人导航、目标定位等领域。
2 嵌入式系统设计系统采用的摄像模块为台湾原相公司的CM OS 图像传感器PAS109B,工作电压2.4~3.6V,分辨率164×124,像素大小7.25 m×7.25 m,图像帧率最高60fps(frame per second),支持I2C接口。
处理器采用台湾俊亿公司提供的DM CU处理器KBD0001B。
DM-CU是为了适应现代便携设备发展而出现的一种全新体系结构,整合了DSP高效的运算能力和M CU强大的控制能力。
K BD0001B字长16位,内部有RO M 32kW,有两种RA M:XRA M(16kW)和YRA M (8kW),可在一个时钟周期内分别从这两个RA M中得到两个操作数。
K BD0001B运算速度最高可达25M IPS,采用了4级流水线结构,每条指令执行时间均为一个时钟周期。
K BD0001B提供48个通用I/O接口,支持SPI、I2C、U A RT、PWM,内嵌了LCD控制器。
这里设计的机器视觉系统以K BD0001B为核心处理器,CM OS摄像模块为图像采集设备,大大降低该系统的复杂度。
将该系统安装于一个移动小车上,通过双目视觉的方法测量障碍物的距离,实现了小车自主行驶和避障,如图1所示。
嵌入式机器视觉系统框图如图2所示。
为实时地测量障碍物距离,系统利用外极线约束[4]重整图像,这样每次只需分别从两图像传感器中第26卷第8期增刊 仪 器 仪 表 学 报 2005年8月图1 移动小车双目测距各取出对应的一行图像即可。
从PA S109B 中获得的图像数据为RGB 格式,首先需要转成灰阶图像:Y =0.299R -0.148G +0.615BY 为8位数据,代表每个像素点的灰阶值。
两行图像总数据量为328Byt es。
图2 嵌入式机器视觉系统框图图3(a )为程序流程图,K BD 0001B 分别从两个PAS109B 取得左、右视图像数据,执行双目测距算法,得到障碍物距离并显示到L ED 7段数码管,当障碍物距离小于预设安全距离时,使小车停止运动。
使用PWM 调制,根据障碍物远近调整小车的速度。
双目测距算法如图3(b)所示,大致可以分为三步:(1)用De-riche 算子[5]对图像滤波,提取边缘特征信息;(2)获得匹配基元,构成匹配矩阵,依据竞争规则得到最佳匹配点以及匹配点对应的视差;(3)根据摄像机透视投影模型,在双摄像模块成平行对准姿态的情况下[4],计算出障碍物的距离。
3 双目测距算法机器人中的机器视觉可以定义为这样一个过程,利用图像传感器获取三维景物的二维图像,通过处理器对一幅或多幅图像进行处理、分析和解释,得到有关景物的符号描述,并为特定服务提供有用的信息,用于指导机器人的动作。
本系统实现的是双目视觉测量简单场景中障碍物的距离。
首先处理两个CM OS 摄像模块获得的前方场景图像,提取图像中特征信息,然后根据特征信息进行图像匹配,计算得出匹配点在两个摄像模块中成像形成的视差,从而确定机器人和障碍物之间的距离。
图3 系统程序图像匹配是机器视觉中的关键技术,本算法首先采用Deriche 算子提取边缘信息,再以提取出的边缘特征信息为匹配基元构造一个匹配矩阵,匹配矩阵的元素为候选匹配点,依据M arr 约束[6]互相竞争,最后胜出者为最佳匹配点。
算法具体描述如下:(1)用递归平滑滤波器滤除图像中的噪声点y 1(n)=x(n)+e -y 1(n-1) n=1,…,N y 2(n)=e -(x(n+1)+y 2(n+1)) n=N ,…,1y(n)=k 0(y 1(n)+y 2(n)) n=1,…,N其中,k 0=1-e- 1+e -为标准化系数,输入x (n),y(n),在系统中取 =0.25。
(2)对滤波后的图像求导,得到边缘信息y 1(n )=x (n -1)+e -y 1(n -1) n =1,…,N y 2(n )=x (n +1)+e -y 2(n +1) n =N ,…,1y(n)=(1-e -)(y 1(n)+y 2(n)) n=1,…,N 其中,x (n )为经过滤波后的图像输入,y (n )为特征提取后的输出。
(3)竞争匹配M arr 约束是图像匹配必须满足三个约束条件:相容性约束,惟一性约束和连续性约束。
两个基元如果匹配首先必须满足:a .几何学约束,左图中的边缘l 和右图中的边缘r 如果匹配,则必须满足x l >x r ;b.斜坡约369 第8期增刊嵌入式机器视觉系统设计束,具有相同梯度符号的边缘才有可能匹配。
根据这两个条件构造匹配矩阵,如图4所示。
图2 匹配矩阵该矩阵是N L ×N R ,其中N L 、N R 分别是左、右图像特征边缘数,矩阵中元素M lr 代表左图中边缘l 与右图中边缘r 相匹配,白圈代表有效匹配,黑圈代表无效匹配。
有效匹配作为候选匹配参加竞争。
根据M arr 约束制定竞争规则:a.左图中某个边缘只能和右图中一个边缘匹配,反之亦然;b .假设左图像中有两个边缘点L 1、L 2,右图像中有也两个边缘点R 1、R 2、L 1与R 1匹配。
如果X L 1>X L 2,X R 1<X R 2,则L 2不可能与R 2匹配;c.匹配得到的视差值的变化在图像中几乎处处平滑,根据与其它匹配视差的差值判断其它匹配的有效程度,并按照下面公式影响它们的匹配程度值:CSM l ′r r(n )=CSM l ′r ′(n -1)-(1-e -x)其中:x 代表M l ′r ′和M lr 视差差值的绝对值。
按如上规则对每个候选点进行一次判断。
最后,竞争胜出者为最佳匹配点。
由匹配点坐标,可方便地求得视差,再根据平行对准姿态下摄像机透视投影模型,就可以计算出障碍物到小车的距离。
4 实验与小结将嵌入式机器视觉系统应用于智能小车,并在该系统上执行基于竞争匹配的双目测距算法。
该算法首先运用了外极线原理重整图像,处理数据量相对于一般双目测距算法大大减小,仅为2×164个像素点;然后采用Deriche 算子提取图像特征信息作为匹配基元,其中图像滤波过程的计算量小于492次M AC 运算,图像求导提取特征过程的计算量也小于492次M AC 运算;最后根据M arr 约束制定了一套竞争规则,候选匹配点构成匹配矩阵,自主竞争产生的胜者即为所要求的最佳匹配点,并得出对应的视差和距离信息。
匹配矩阵通常小于10维,以10维为例,候选匹配至多为100个,那么匹配过程中至多进行104比较操作,5×104次加法操作。
KBD 0001B 执行一条指令需一个时钟周期,每个时钟周期约为0.04 s,所以本系统测距时间小于10ms,具有非常良好的实时性。
实验表明本设计能可靠地工作,基本实现了简单场景中静止物体的实时测距。
该系统可作为一个良好的机器视觉研发平台,也可直接嵌入到智能机器人中实现视觉引导、视觉监控等功能。
参考文献1 Y amakaw a T.,Shimo no mura K..Depth per ception cir-cuit em ploy ing ser ial o utput signals fr om tw o visio n chips .SM C :System s ,M an ,and Cy ber netics ,IEEE Co nfer ence P ro ceeding s,1999.2 W atanabe M.,Na yar S.K..M inimal operat or set for passive dept h fr om defocus .CV PR :Comput er V isio n and Patter n R eco g nitio n,I EEE computer societ y confer-ence pr oceedings,1996.3 田涛,邓兵,潘俊民.基于景物散焦图像的测量.计算机研究与发展,2001,(2):136~180.4 吴立德.计算机视觉[M ].复旦大学出版社,1993,12.5 Der iche R .F ast alg or ithms for lo w -lev el v isio n .IEEE tr ansactio ns on pat tern analy sis and machine intelli-g ence ,1990,12(1):78~87.6 D .M ar r ,T .Pog g io .Coo per ativ e of ster eo disparity .Science,1976,283~287.370仪 器 仪 表 学 报 第26卷 。