平面四连杆机构模型仿真
- 格式:doc
- 大小:1.53 MB
- 文档页数:15
基于matlab的平⾯四杆机构动态仿真摘要:本⽂基于matlab 强⼤的数值计算功能,借助fsolve 函数,建⽴了⼀个平⾯四杆机构模型,并对此进⾏运动仿真,为平⾯四杆机构的尺⼨优化设计和运动分析提供了⼀条简单实⽤的捷径。
关键词:平⾯四杆机构 matlab fsolve 函数1 背景介绍平⾯四连杆机构是⼯程应⽤中使⽤⼴泛的机械结构。
如果知道相应尺⼨下杆件的运动轨迹,速度⼤⼩,对整个机构的优化设计有重要作⽤。
Matlab 具有强⼤的科学计算机数据处理能⼒,出⾊的图形处理功能,且程序语⾔简单。
基于以上叙述,本⽂⾸先设计了平⾯四杆机构的各连杆参数,然后在matlab 环境下运⽤⽜顿-⾟普顿算法,使⽤fsolve 函数快速实现了运动仿真并以图形的形式将其运动情况显⽰了出来。
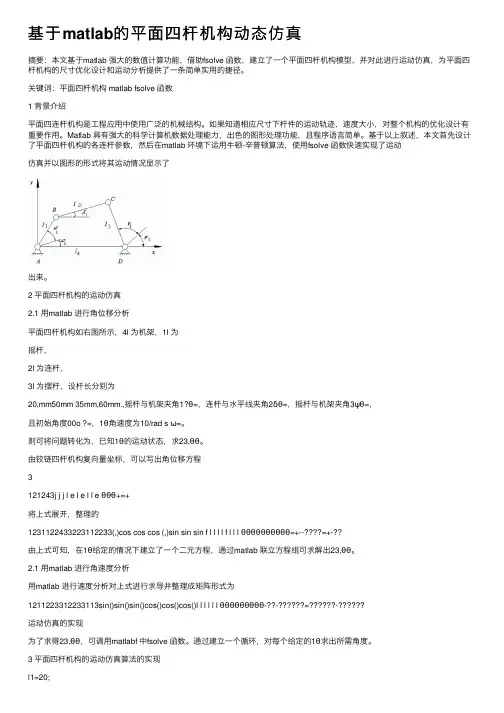
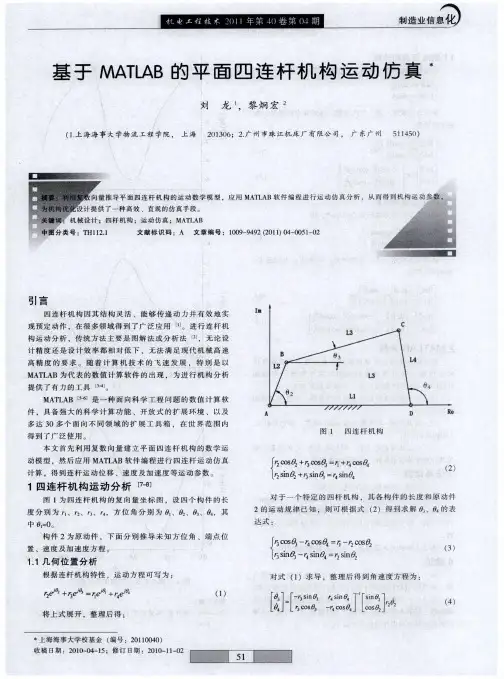
2 平⾯四杆机构的运动仿真2.1 ⽤matlab 进⾏⾓位移分析平⾯四杆机构如右图所⽰,4l 为机架,1l 为摇杆,2l 为连杆,3l 为摆杆,设杆长分别为20,mm50mm 35mm,60mm.,摇杆与机架夹⾓1?θ=,连杆与⽔平线夹⾓2δθ=,摇杆与机架夹⾓3ψθ=,且初始⾓度00o ?=,1θ⾓速度为10/rad s ω=。
则可将问题转化为,已知1θ的运动状态,求23,θθ。
由铰链四杆机构复向量坐标,可以写出⾓位移⽅程3121243j j j l e l e l l e θθθ+=+将上式展开,整理的1231122433223112233(,)cos cos cos (,)sin sin sin f l l l l f l l l θθθθθθθθθθ=+--=+-??由上式可知,在1θ给定的情况下建⽴了⼀个⼆元⽅程,通过matlab 联⽴⽅程组可求解出23,θθ。
2.1 ⽤matlab 进⾏⾓速度分析⽤matlab 进⾏速度分析对上式进⾏求导并整理成矩阵形式为1211223312233113sin()sin()sin()cos()cos()cos()l l l l l l θθθθθθθθθ-??-=-运动仿真的实现为了求得23,θθ,可调⽤matlabf 中fsolve 函数。
基于UG的平⾯四连杆机构运动与仿真毕业设计论⽂题⽬: 基于UG的平⾯四连杆机构设计及运动仿真专业名称机电设备维修与管理学⽣姓名李⼩军指导教师季祥毕业时间2011年7⽉毕业设计任务书指导教师:季祥⼀、设计题⽬⽤基于UG的空间四连杆机构设计及运动仿真⼆、设计的⽬的1)掌握UG的基本使⽤⽅法。
2)掌握四连杆机构的特点及虚拟装配的⽅法。
3)掌握UG中运动仿真的⽅法。
三、设计要求1)平⾯四连杆机构的三维造型。
2)平⾯四连杆机构的虚拟装配3)UG中平⾯四连杆机构的运动仿真。
4)仿真结果的分析四、完成的任务要求说明详细,字迹⼯整,原理正确,图纸规范,图形清晰,符号标准,线条均匀。
(1)设计与绘制平⾯四连杆机构,建⽴运动仿真的模型。
(2)毕业设计说明书(8000以上)1)设计题⽬2)四连杆机构原理说明3)四连杆机构的三维造型设计及虚拟装配4)UG的四连杆运动仿真5)设计总结及改进意见6)主要参考资料五、参考⽂献机械设计⾼等教育出版社主编濮良贵纪名刚机械原理⾼等教育出版社主编孙恒陈作模UG NX5.0中⽂版从⼊门到精通机械⼯业出版社主编胡仁喜、康⼠廷、刘昌丽⽬录摘要 (4)第1章绪论 (5)1.1 UG NX5的功能模块 (5)1.1.1 UG NX5⽤户界⾯ (5)1.1.2主要功能 (6)1.2 UG NX5的⼯作环境 (9)1.3 产品设计的⼀般过程 (12)1.4 三维造型设计步骤 (13)第⼆章平⾯连杆机构 (15)2.1 平⾯四杆机构的基本形式 (15)2.2 铰链四杆机构中曲柄存在的条件 (16)2.3 铰链四杆机构的演化 (17)第三章平⾯四杆机构的基本特性 (20)3.1 四杆机构的极位 (20)3.2 四杆机构从动件的急回特性 (20)3.3 平⾯连杆机构的传⼒特性 (20)3.4 死点位置 (21)第四章四连杆的三维造型 (22)4.1 机架的三维造型 (22)4.2 连架杆1的三维造型 (26)4.3 连架杆2的三维造型 (28)4.4 连杆的三维造型 (28)第五章四连杆的虚拟装配 (31)5.1 进⼊装配模块 (31)5.2 添加组件机架 (31)5.3 装配连架杆1 (32)5.4 装配连架杆2 (34)5.5 装配连杆 (35)第六章平⾯四连杆机构的运动仿真 (40)6.1 新建仿真 (40)6.2 新建连杆 (41)6.3 创建运动副 (43)第七章平⾯四连杆的运动仿真分析 (46)7.1 运动副图表分析 (46)7.2 死点位置 (49)结论 (51)致谢 (52)参考⽂献 (53)摘要UG NX是集CAD\CAE\CAM于⼀体的三维参数化软件,也是当今世界最先进的设计软件,它⼴泛应⽤于航空航天、汽车制造、机械电⼦等⼯程领域。
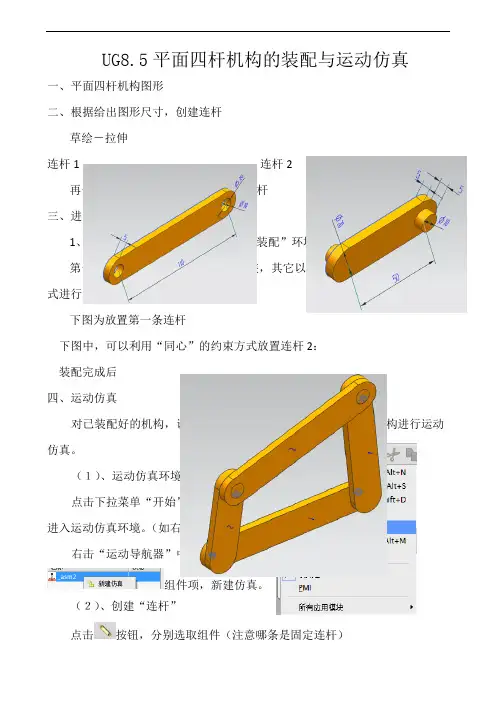
UG8.5平面四杆机构的装配与运动仿真一、平面四杆机构图形二、根据给出图形尺寸,创建连杆草绘-拉伸连杆1 连杆2再分别绘出类似连杆1、2的3、4连杆三、进行连杆的装配:1、新建“模型”,选择“建模”-“装配”环境进入。
第一条连杆以“绝对原点”方式安装,其它以“同心”的“装配约束”方式进行装配下图为放置第一条连杆下图中,可以利用“同心”的约束方式放置连杆2:装配完成后四、运动仿真对已装配好的机构,设置运动副,并根据机构设置驱动,使机构进行运动仿真。
(1)、运动仿真环境:点击下拉菜单“开始”-“运动仿真”进入运动仿真环境。
(如右图)右击“运动导航器”中的组件项,新建仿真。
(2)、创建“连杆”点击按钮,分别选取组件(注意哪条是固定连杆)分别创建L001(固定)、L002、L003、L004。
(3)、创建“运动副”,两“连杆”间的能进行的相对运动方式由“运动副”的类别确定。
点击按钮,在对话框中选择“运动副”类型,例如本机构选择“”。
同样方式创建其余三个铰合点的运动副(图中J002、J003、J004、J005)(4)设置驱动副双击左侧“运动导航器”中已创建的运动副“”进入“运动副”编辑对话框,在驱动选项页中设置运动即可。
(4)运动“解算方案”设定和运动方案可行性“求解”点击按钮,在“解算方案”对话框中设置运动参数,(时间影响运动周期,步数与驱动速度一样影响运动的快慢)。
点击对“解算方案”进行求解,若出现错误报告,则不能进行运动仿真。
点击播放按钮进行运动仿真,点击“”导出运动仿真视频,可以点击“”设置动画播放形式,点击按钮退出运动仿真动画。
实验一、平面铰链四杆机构建模与仿真1、实验目的(1)掌握Adams/View启动、环境设置、模型的保存与打开方法;(2)掌握构件和运动副的创建、命名和编辑修改;(3)掌握简单驱动规律和负载的施加方法;(4)掌握简单的模型校验和检查方法;(5)掌握简单的仿真设置及后处理;(6)初步掌握机构的装配法建模;(7)理解Adams/View的建模与仿真分析流程和步骤及其意义。
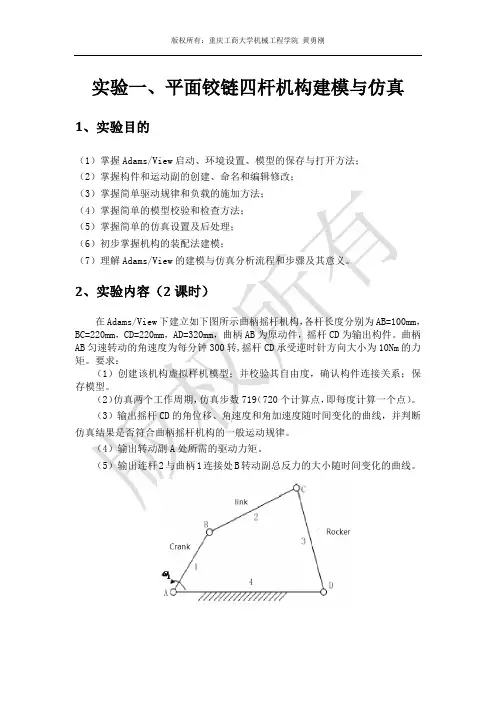
2、实验内容(2课时)在Adams/View下建立如下图所示曲柄摇杆机构,各杆长度分别为AB=100mm,BC=220mm,CD=220mm,AD=320mm,曲柄AB为原动件,摇杆CD为输出构件。
曲柄AB匀速转动的角速度为每分钟300转,摇杆CD承受逆时针方向大小为10Nm的力矩。
要求:(1)创建该机构虚拟样机模型;并校验其自由度,确认构件连接关系;保存模型。
(2)仿真两个工作周期,仿真步数719(720个计算点,即每度计算一个点)。
(3)输出摇杆CD的角位移、角速度和角加速度随时间变化的曲线,并判断仿真结果是否符合曲柄摇杆机构的一般运动规律。
(4)输出转动副A处所需的驱动力矩。
(5)输出连杆2与曲柄1连接处B转动副总反力的大小随时间变化的曲线。
3、实验步骤3.1启动Adams/View从桌面图标或开始菜单栏启动Adams/View如下图3.2创建新模型并设置建模环境(a)选择New Model选项创建新模型;(b)在Model Name文本框中输入将要创建的模型名:crank_rocker_mechanism;(c)在Gravity栏选择重力加速度的方向为全局坐标系的-Y方向;(d)在Units栏选择建模单位系统为MMKS-mm,kg,N,s,deg(e)点击Working Directory栏右侧的文件夹图标,选择保存模型文件的目录;(f)选择保存模型文件的文件夹;(g)选择确定按钮,返回Create New Model对话框;(h)选择OK按钮,完成模型文件名、重力加速度、单位系统、工作目录设置。
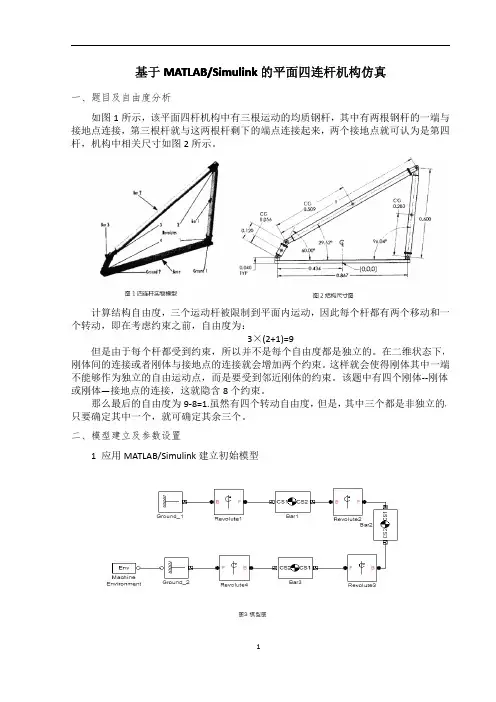
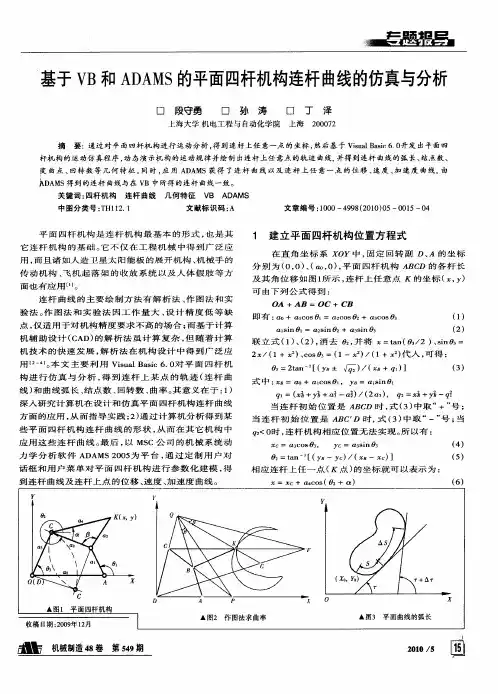
基于MATLAB/Simulink的平面四连杆机构仿真一、题目及自由度分析如图1所示,该平面四杆机构中有三根运动的均质钢杆,其中有两根钢杆的一端与接地点连接,第三根杆就与这两根杆剩下的端点连接起来,两个接地点就可认为是第四杆,机构中相关尺寸如图2所示。
计算结构自由度,三个运动杆被限制到平面内运动,因此每个杆都有两个移动和一个转动,即在考虑约束之前,自由度为:3×(2+1)=9但是由于每个杆都受到约束,所以并不是每个自由度都是独立的。
在二维状态下,刚体间的连接或者刚体与接地点的连接就会增加两个约束。
这样就会使得刚体其中一端不能够作为独立的自由运动点,而是要受到邻近刚体的约束。
该题中有四个刚体--刚体或刚体—接地点的连接,这就隐含8个约束。
那么最后的自由度为9-8=1.虽然有四个转动自由度,但是,其中三个都是非独立的,只要确定其中一个,就可确定其余三个。
二、模型建立及参数设置1应用MATLAB/Simulink建立初始模型2在初始模型的基础上添加Joint Sensor模块3依题意设置相关参数⑴配置Ground模块由图2可得系统的基本尺寸为:①固定构件长86.7厘米②Ground_1表示接地点,在World CS坐标轴原点右边43.3cm处③Ground_2表示接地点,在World CS坐标轴原点左边43.4cm处④最下端的铰处于X-Z平面内原点以上4cm图5Ground_1模块参数设置图6Ground_2模块参数设置4配置Joint模块三个没有接地的联杆都是在X-Y平面内的,所以Revolute轴必须是Z轴。
⑴依次打开Revolute参数对话框,保持默认值,即Axis of rotation[x y z]默认设置为[001],Reference csys都是WORLD。
图7Revolute坐标设置⑵根据连接情况依次设置Revolute参数对话框中的Connection parameters参数图8Revolute模块参数对话框Connection parameters参数图9Revolute模块参数对话框Connection parameters参数图10Revolute模块参数对话框Connection parameters参数图11Revolute模块参数对话框Connection parameters参数5配置Body模块本题中Body模块(即Bar)定位方式不是直接相对于WORLD坐标系统,而是采用相对坐标形式,Bar1的CS1相对于Ground_1,Bar2的CS1相对于Bar1,以此类推。
考虑运动副间隙的平面四杆机构动力学建模与仿真运动副间隙是指机构中的运动副在运动过程中存在的一种松动现象,导致副间隙。
由于副间隙的存在,机构的运动会产生滞后、虚位误差和振动等问题,影响机构的精度和稳定性。
在平面四杆机构中考虑运动副间隙的动力学建模与仿真可以通过以下步骤进行:
1. 建立机构的运动学模型:根据平面四杆机构的结构和运动副间隙的位置,确定机构的坐标系和杆件连接的几何关系。
通过运动学分析,可以得到机构中各杆件的位置、速度和加速度等运动参数。
2. 建立运动副间隙的数学模型:运动副间隙可以通过非线性弹簧-阻尼器模型进行建模。
通过测量和实验,得到间隙的特性曲线,如间隙随杆件位移的变化关系。
运用模型参数估计方法,可以得到间隙的数学模型。
3. 建立机构的动力学模型:根据机构的运动学模型和运动副间隙的数学模型,可以在拉格朗日动力学原理的基础上建立机构的动力学模型,即机构中各杆件的运动方程。
4. 进行仿真分析:利用动力学模型,进行仿真分析。
通过数值计算方法,求解机构的运动方程,可以得到机构的位移、速度和加速度等动力学性能指标。
5. 优化设计与控制:根据仿真结果,对机构进行优化设计和控制策略的选择,以减小运动副间隙的影响,提高机构的精度和稳定性。
总之,考虑运动副间隙的平面四杆机构动力学建模与仿真是一项复杂的任务,需要综合考虑机构的结构特点、运动学关系和动力学特性等因素,通过合理的建模和仿真分析,可以为机构的设计和控制提供科学依据。
项目1 平面四连杆的运动仿真学习目标了解NX 运动仿真的特点与应用进入运动仿真模块了解运动仿真模块的常用工具条的应用了解运动仿真的一般步骤能够创建连杆并指定固定连杆能够创建运动副能够为运动副指定驱动能为运动仿真设置解算器能运用动画工具查看仿真结果UG NX机械结构设计仿真与优化·2·项目1 平面四连杆的运动仿真·3·1.1 平面四连杆的机构原理与运动要求平面四连杆机构是一种常用的结构,而所有运动副均为转动副的四杆机构称为铰链四杆机构,它是平面四杆机构的基本形式,其他四杆机构都可以看成是在它的基础上演化而来的。
在平面四连杆中,选定其中一个构件作为机架之后,直接与机架连接的构件称为连架杆,不直接与机架连接的构件称为连杆,能够做整周回转的构件被称作曲柄,只能在某一角度范围内往复摆动的构件称为摇杆。
在铰链四杆机构中,有的连架杆能做整周转动,有的则不能,两构件的相对回转角为360°的转动副称为整转副。
整转副的存在是曲柄存在的必要条件,按照连架杆是否可以做整周转动,可以将其分为3种基本形式,即曲柄摇杆机构、双曲柄机构和双摇杆机构。
铰链四杆机构的两个连架杆中若一个为曲柄,另一杆为摇杆,则此机构称为曲柄摇杆机构。
曲柄摇杆机构的功能是:将转动转换为摆动,或将摆动转换为转动。
如图1-1所示,图中由4个杆件组成了一个曲柄摇杆机构。
杆件L1、L2、L3、L4在端点位置A 、B 、C 、D 处分别铰接,形成铰链四杆机构,其中L4为固定的机架,L1为连杆,L2为曲柄,L3为摇杆。
L2可以做整周的转动,而L3只能做摆动。
图1-1 曲柄摇杆机构平面四连杆的机构进行运动仿真时,需要进行以下操作。
(1)创建4个杆件的零件模型。
(2)创建装配文件,将各个杆件装配到一个装配文件中。
(3)进入运动仿真模块,并创建运动仿真。
(4)将4个杆件定义为连杆。
(5)将机架零件的连杆指定为固定连杆,不允许移动或旋转。
平面四连杆机构模型仿真(SimMechanics)
1.四连杆实物模型:
平面四连杆机构仿真,主动杆3长度为0.12m,连杆2长度为1m,杆3长度为0.6m,杆2固定,铰接位置长度为0.867m。
主动杆3与水平轴X的夹角为60°,杆2的水平夹角为29.52°。
从该机构运动简图可见,整个系统有两个固定机架,3个刚体的连杆通过四个单自由度转动副和这两个固定机架相连,假设主动杆3绕铰4以w角速度转动,并假设为正弦信号,试分析杆2的两个端点3和2的运动轨迹。
2.建立仿真框图
1).建立一个SimMechanics模型窗口如图
2).分别选择并拖拽机械环境图标1次、固定端图标2次、刚体图标3次、Revolute运动图标4次、Joint Sensor图标2次及示波器Scope图标1次。
如图
3).修改模块名称,旋转模块,连接模块,如图
3.参数设置1).Ground1.如图
2).Revolute1.如图
4).Revolute2.如图
6)Revolute3.如图
8)Revolute4.如图
9)Ground2.如图
10)Env.如图
11)Joint sensor and Joint sensor2 .如图
1.示波器上显示铰2和铰3的角位移图
2.设置Configuration Parameters相应选项后可在仿真过程中同步动画,如图
3.椭圆体显示图,如图
应用M a t l a b /S i m u l i n k 建立仿真模型
1.传动机构的仿真分析
质量-阻尼系统仿真分析
L i L i L i L 221
1θ=
T -T i 11s J +J s+B +B i
i i ⎛⎫ ⎪⎡⎤⎛⎫⎝⎭
⎪⎢⎥⎝⎭⎣⎦
()i
e e 1
T
J s+B i 1i
1
s
(
)
i T s ()
i s θ ()
L s θ ()
L s θ
2.建立系统仿真
1)、建立工作窗口,如图
2)、拖拽所需图标放进工作模块,如图
3)、修改模块名,连线,如图
5)、封装,如图
7)、参数设置,如图
8)、完成如图
3.仿真结果
如图:。