第三节数控系统的软件结构
- 格式:ppt
- 大小:407.00 KB
- 文档页数:44
数控机床各个组成部分的工作原理及结构第一节输入装置输入装置是整个数控系统的初始工作机构,它将准确可靠的接收信息介质上所记录的“工程语言"、运算及操作指令等原始数据,转为数控装置能处理的信息,并同时输送给数控装置。
输入信息的方式分手动输入和自动输入。
手动输入简单、方便但输入速度慢容易出错。
现代数控机床普遍采用自动输入,其输入形式有光电阅读机、磁带阅读机及磁盘驱动器以及无带自动输入方式.其它输入方式:1。
无带自动输入方式在高档数控机床上,设置有自动编程系统和动态模拟显示器(CRT).将这些设备通过计算机接口与机床的数控系统相连接,自动编程所编制的加工程序即可直接在机床上调用,无需经制控制介质后再另行输入。
2。
触针接触式阅读机输入方式又称为程控机头或电报机头,结构简单,阅读速度较慢,但输入可靠、价格低廉故在部分线切割机床加工中仍在用。
3。
磁带、磁盘输入方式磁带输入方式进行信息输入,其信息介质为“录音"磁带,只不过录制的不是声音,而是各种数据。
加工程序等数据信息一方面由微机内的磁盘驱动器“写入”磁盘上进行储存,另外也由磁盘驱动器进行阅读并通过微机接口输入到机床数控装置中去。
第二节数控装置数控装置是数控机床的核心,数控机床几乎所有的控制功能(进给坐标位置与速度,主轴、刀具、冷却及机床强电等多种辅助功能)都由它控制实现。
因此数控装置的发展,在很大程度上代表了数控机床的发展方向。
数控装置的作用是接收加工程序等送来的各种信息,并经处理分配后,向驱动机构发出执行的命令,在执行过程中,其驱动、检测等机构同时将有关信息反馈给数控装置,经处理后,发出新的命令。
一、数控装置的组成1、数字控制的信息1)几何信息——是指通过被加工零件的图样所获得的几何轮廓的信息。
这些信息由数控装置处理后,变为控制各进给轴的指令脉冲,最终形成刀具的移动轨迹。
几何信息的指令,由准备功能G具体规定。
2)工艺信息———通过工艺处理后所获得的各种信息。
数控系统控制软件的功能与结构一、掌握软件的结构数控系统的软件由管理软件和掌握软件组成,管理软件包括零件程序的输入输出程序、显示程序与故障诊断程序等,掌握软件包括译码程序、刀具补偿计算程序、插补计算程序、速度掌握程序和位置掌握程序等。
数控系统掌握软件常采纳前后台型结构。
二、数控系统的功能1. 系统管理功能用于系统各功能模块的管理与调度。
2. 加工程序的管理与编辑3. 在参数设置模块中,可对各种参数进行设置,数控系统中大致有四类参数。
(1)刀具参数(2)G53~G59参数G53~G59参数在数控编程中用于坐标系的零点偏置。
(3)丝杠的间隙与螺距误差表在半闭环与开环数控系统中,传动链的间隙直接影响加工精度,因此须测量出各轴的传动间隙,并置人数控系统,由系统对间隙进行自动补偿。
(4)系统掌握参数当配接不同的机床时,系统掌握参数要做相应的转变。
4. 手动操作与调整(1)坐标轴的移动掌握1)连续移动2)点动3)手摇脉冲发生器移动(2)手动MST功能的掌握在手动调整中,可以单独指定执行某一M、S、T功能。
(3)机床坐标系的建立与返回参考点数控系统的很多功能,如螺距误差补偿、G53~G59零点偏置、换刀点等,都是定义在机床坐标系下的。
机床坐标系是通过系统执行返回参考点来建立的。
5 . 零件的自动加工通过键盘和通信接口将预备好的零件加工程序送入数控系统,然后就可启动零件的自动加工功能,该功能是数控系统的核心。
6. 空运行与加工图形模拟该功能用于验证加工程序的正确性。
数控系统的图形模拟功能可将刀具的运行轨迹在显示器上显示出来,直观地检查程序。
7. 数控系统的自诊断与开关I/O诊断功能数控系统在执行全部功能时,都不断地对其自身是否正常工作进行诊断,一旦发觉特别,马上产生报警,并停止系统的运行。
数控机床系统的软件结构数控机床是我们公司的主营产品,小编为大家讲一下数控机床系统的软件结构呦!数控机床软件分为应用软件和系统软件。
数控机床系统软件是为实现数控机床系统各项功能所编制的专用软件,也叫控制软件,存放在计算机EPROM内存中。
各种数控机床系统的功能设置和控制方案各不相同,它们的系统软件在结构上和规模上差别很大,但是一般都包括输入数据处理程序、插补运算程序、速度控制程序、管理程序和诊断程序。
(1)输入数据处理程序?? 它接收输入的零件加工程序,将标准代码表示的加工指令和数据进行译码、数据处理,并按规定的格式存放。
有的系统还要进行补偿计算,或为插补运算和速度控制等进行预计算。
通常,输入数据处理程序包括输入、译码和数据处理三项内容。
(2)插补计算程序?? 数控机床系统根据工件加工程序中提供的数据,如曲线的种类、起点、终点等进行运算。
根据运算结果,分别向各坐标轴发出进给脉冲。
这个过程称为插补运算。
进给脉冲通过伺服系统驱动工作台或刀具作相应的运动,完成程序规定的加工任务。
数控机床系统是一边插补进行运算,一边进行加工,是一种典型的实时控制方式,所以,插补运算的快慢直接影响机床的进给速度,因此应该尽可能地缩短运算时间,这是编制插补运算程序的关键。
(3)速度控制程序?? 速度控制程序根据给定的速度值控制插补运算的频率,以保预定的进给速度。
在速度变化较大时,需要进行自动加减速控制,以避免因速度突变而造成驱动系统失步。
我们的产品质量可靠,价格合理,公司拥有完善的管理制度及精湛的技术能力,以百分百的产品质量为您服务。
如有问题,欢迎来电咨询,我们会是您理想的选择!真诚期待与您合作!(编辑:东莞雄富精密机械厂,官方网:)。
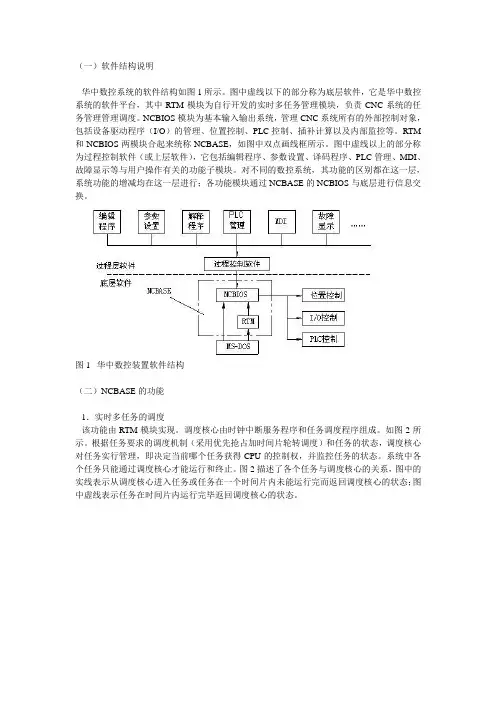
(一)软件结构说明华中数控系统的软件结构如图1所示。
图中虚线以下的部分称为底层软件,它是华中数控系统的软件平台,其中RTM模块为自行开发的实时多任务管理模块,负责CNC系统的任务管理管理调度。
NCBIOS模块为基本输入输出系统,管理CNC系统所有的外部控制对象,包括设备驱动程序(I/O)的管理、位置控制、PLC控制、插补计算以及内部监控等。
RTM 和NCBIOS两模块合起来统称NCBASE,如图中双点画线框所示。
图中虚线以上的部分称为过程控制软件(或上层软件),它包括编辑程序、参数设置、译码程序、PLC管理、MDI、故障显示等与用户操作有关的功能子模块。
对不同的数控系统,其功能的区别都在这一层,系统功能的增减均在这一层进行;各功能模块通过NCBASE的NCBIOS与底层进行信息交换。
图1 华中数控装置软件结构(二)NCBASE的功能1.实时多任务的调度该功能由RTM模块实现。
调度核心由时钟中断服务程序和任务调度程序组成。
如图2所示。
根据任务要求的调度机制(采用优先抢占加时间片轮转调度)和任务的状态,调度核心对任务实行管理,即决定当前哪个任务获得CPU的控制权,并监控任务的状态。
系统中各个任务只能通过调度核心才能运行和终止。
图2描述了各个任务与调度核心的关系,图中的实线表示从调度核心进入任务或任务在一个时间片内未能运行完而返回调度核心的状态;图中虚线表示任务在时间片内运行完毕返回调度核心的状态。
图2 多任务调度图2.设备驱动程序对于不同的控制对象,如加工中心、数控铣床、数控车床、数控磨床等,硬件的配置可能不同,而不同的硬件模块其驱动程序也不同。
华中数控系统就很好的解决了这个问题。
在配置系统时,所有的硬件模块的驱动程序都要在NCBIOS的NCBIOS.CFG中说明(格式为:DEVICE=驱动程序名)。
系统在运行时,NCBIOS根据NCBIOS.CFG的预先设置,调入对应模块的驱动程序,建立相应的接口通道。
第三章计算机数控装置第一节概述一、CNC装置软件的功能结构如图3-2所示。
二、CNC装置的功能控制功能(轴数)、准备功能、插补功能和固定循环功能、进给功能、主轴功能、辅助功能、刀具管理功能、补偿功能、人机对话功能、自诊断功能、通信功能。
第二节CNC装置的硬件结构一、概述1、单机系统;采用分时处理来实现各种数控功能2、多机系统:有两个或两个以上CPU有一个主CPU有控制和使用系统存储器和系统总结权,其它CPU只能接受主CPU的控制命令或数据二、功能:如图3-5所示1、特点:采用模块化结构,良好的适应性和扩展性、结构紧凑、更换方便2、模块之间的通信a、共享总线:图3-14特点:易实现、经济、效率低b、共享存贮器:图3-15特点:避免防冲突、但扩展较困难三、各模块的作用1、计算机主板和系统总线主板:对输入到CNC装置中的各种数据、信息,进行相应的算术和逻辑运算,CPU芯片及其外围芯片,内存单元、通信接口、软、硬驱动器接口。
系统总线:如图3-7所示,有数据总线、地址总线、控制总线。
2、显示模块:VGA、SVGA3、输入/输出模块(多功能卡)通信接口,RS2324、电子盘(存储模块)作用:如存放系统程序、零件加工程序。
通常采用电子存储器件,即半导体存储器件。
5、设备辅助控制接口模块:如图3-9所示CNC对设备控制:1、轨迹控制:坐标轴的速度和位置;2、顺序控制:对设备动作。
交换的信息:1、开关量信号:行程开关;2、模拟量信号:传感器;3、脉冲量信号。
输入:状态信息→数字信息→计算机输出:满足各种有关执行元件的输入要求。
功率放大(功率匹配)、电气隔离PLC的定义:是一种专为在工业环境下应用而设计的数字运算操作的电子系统,它采用可编程的存贮器,用来在其内部存贮执行逻辑运算,顺序控制、定时、计算和算术运算等操作的指令,并通过数字式、模拟式的输入和输出,控制各种类型的机械设备和生产过程。
6、位置控制模块作用:接受CNC插补运算后输出的位置控制命令,经调节运算输出速度控制指令,然后进行相应的变换后(D/A转换),输出速度指令电压给速度控制单元,去控制伺服电机运行,对于闭环控制或半闭环控制,它还要回收实际位置信号和实际速度信号。