和利时标准功能模块改进需求说明(工程师培训)
- 格式:doc
- 大小:7.96 MB
- 文档页数:34

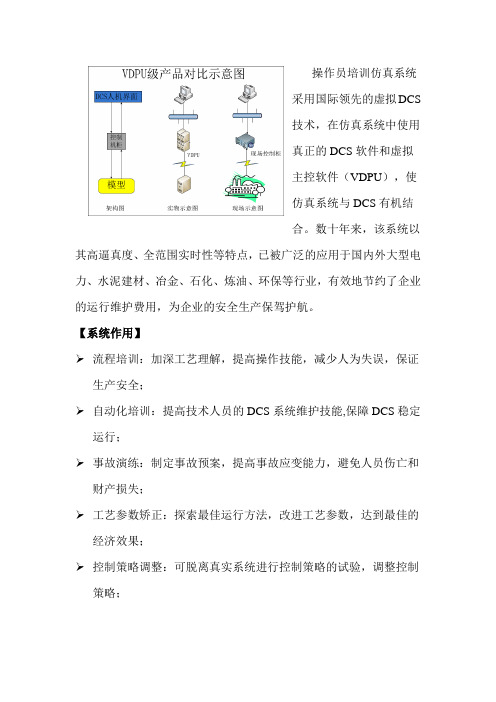
采用国际领先的虚拟DCS技术,在仿真系统中使用真正的DCS软件和虚拟主控软件(VDPU),使仿真系统与DCS有机结合。
数十年来,该系统以其高逼真度、全范围实时性等特点,已被广泛的应用于国内外大型电力、水泥建材、冶金、石化、炼油、环保等行业,有效地节约了企业的运行维护费用,为企业的安全生产保驾护航。
【系统作用】流程培训:加深工艺理解,提高操作技能,减少人为失误,保证生产安全;自动化培训:提高技术人员的DCS系统维护技能,保障DCS稳定运行;事故演练:制定事故预案,提高事故应变能力,避免人员伤亡和财产损失;工艺参数矫正:探索最佳运行方法,改进工艺参数,达到最佳的经济效果;控制策略调整:可脱离真实系统进行控制策略的试验,调整控制策略;先进控制与优化辅助:为先进控制与优化提供测试和实验平台,降低投运风险。
【技术特点】与DCS软件无缝衔接,两者工程可互相拷贝,为进行高端研究打下基础;多流程分布式计算,计算准确、稳定、高效,适用于大规模流程工业仿真;图形化自动建模技术,建模过程简单、高效,模型易维护;采用国际标准物性库,有几万种物性组分,随着实验验证不断修正,提高计算准确性;物性方程种类丰富,根据不同工况可灵活选择。
【性能指标】稳态仿真精度:关键性参数的稳态仿真精度应为1%,非关键性参数的仿真精度应为3%;暂态仿真精度:关键性参数的暂态仿真精度应为3%,非关键性参数的暂态精度应为5%。
【主要业绩清单】●台山发电厂二期扩建工程1000MW仿真机●国华呼伦贝尔发电有限公司2×600MW火电机组扩建工程仿真系统●陕西国华锦界电厂600MW亚临界机组●神华五彩湾350MW超临界电厂仿真系统●河北马头发电有限责任公司“上大压小”供热工程300MW机组DCS仿真系统仿真系统●广州大学城燃气-蒸汽联合循环机组仿真系统●庆华集团腾格里一期焦化、己内酰胺项目OTS系统●抚顺矿业集团页岩炼油胜利实验厂ATP装置仿真培训系统项目工程●中科合成油技术有限公司200万吨/年煤制油项目虚拟DCS动态仿真系统●中石油辽阳石化乙烯/延迟焦化/硝酸装置(含3D) 虚拟DCS动态仿真系统●中石油宁夏石化45万吨合成氨/80万吨尿素虚拟DCS动态仿真系统●中海油能源发展股份有限公司丙烯酸甲乙酯/丁酯项目仿真培训系统全部业绩清单【主要案例】火电仿真--广东韶关660MW仿真系统新能源仿真--广州大学城燃气-蒸汽联合循环装置仿真系统NCS仿真--陕西国华锦界600MW机组变电站仿真--南山东海电厂仿真项目化工仿真--宁夏石化45/80合成氨尿素仿真系统化工仿真--辽阳石化乙烯装置OTS仿真系统化工仿真--平煤神马集团危化行业仿真系统。







和利时标准功能模块改进需求说明编写:校对:审核:目录1 组合伺放功能块 (3)1.1 功能块 (3)1.2 功能说明: (4)1.3 画面显示要求: (5)1.4 操作器窗口: (6)1.5 算法组态: (6)1.5.1变量声明: (6)1.5.2 算法逻辑 (7)2 顺控设备功能块 (9)2.1 功能块 (9)2.2 功能说明: (10)2.2.1.执行功能 (10)2.2.2. 监视功能 (12)2.3 画面显示要求: (13)2.4 操作器窗口: (14)2.5 算法组态: (15)2.5.1变量声明: (15)2.5.2 算法逻辑 (17)3 断路器功能块 (20)3.1 功能块 (20)3.2 功能说明: (21)3.2.1.执行功能 (21)3.2.2. 监视功能 (22)3.4 操作器窗口: (24)3.5 算法组态: (25)3.5.1变量声明: (25)3.5.2 算法逻辑 (27)4远操调节门功能块 (31)4.1 功能块 (31)4.2 功能说明: (31)4.3 画面显示要求: (32)4.4 操作器窗口: (32)4.5 算法组态: (33)4.5.1变量声明: (33)1.5.2 算法逻辑 (34)标准功能模块改进需求说明以表格的形式具体描述了系统提供的标准功能模块的图示、各项参数的定义和取值范围以及模块的功能说明:1 组合伺放功能块1.1 功能块1.2 功能说明:●应用组合伺服手操时,应将过程输入及位置反馈分别连到两个输入端IN和ZT;FM接外部强制手动判断;AO/AC接联锁开/关。
其输出端DV即为电动执行器开指令,RV为关指令;PV是被控参数过程测量值,SP是PID控制的给定值,相关项可不接,系统会做相应的缺省处理。
●组合伺服手操器在开关输出回路中可独立使用和运行,替开关量输出型调节门功能块;与PID一起使用时,代替模拟手操和伺放。
●输入操作操作器的输入操作有:手动开、手动关、自动开、自动关为置位开关型;手/自动切换、检修为增减特性;手动增、手动减是模拟量型。

254附录 : HollySys 标准功能模块说明本附录以表格的形式具体描述了系统提供的标准功能模块的图示、各项参数的定义和取值范围以及模块的功能说明。
为清楚起见,先对描述中要用到的公共符号作出规定,在以后的说明中将不再赘述。
K :K 在离散化公式中表示采样序号,K=0,1,2,...; S :S 是拉普拉斯算子;TS :TS 是运算周期,单位为秒。
其值为实际工程组态中所设定的程序执行调度周期;1.控制运算名称流量积算(积算)所属库MacsCtrol.lib算 法 块 表 示名称(项名) 说明I1模拟量输入,浮点型 RS 复位信号,布尔量 AV 积算结果,输出端,浮点型 输入 输出端 说明SS选择结果,输出端,布尔量 积算初值(IV) 浮点型积算总量(MS) 长浮点型, 初值为64为浮点数, 1.79769313486232E308 参数项 定义仪表因子(MC)长浮点型255名称流量积算(积算)所属库MacsCtrol.lib功 能 说 明用于对模拟量输入信号,每个运算周期进行累计。
当复位信号RS 无效时{AV(K)=AV(K-1)+ I1(K)*MC ;其中AV(0)=IV ; 如果AV(K)<MS ,则 SS=0; 否则{ SS=1AV(K)=AV(K)-MS ; } }当RS 从0变到1时{上一次的输出结果值LR = AV(K);AV(K)=IV ;SS=0; }其中:MC 与处理周期和时间单位有关。
名称偏差报警所属库MacsCtrol.lib算 法 块 表 示名称(项名) 说明I1输入端1,浮点型 I2 输入端2,浮点型HL 输入端,正偏差限,浮点型;HL ≥0 LL 输入端,负偏差限,浮点型;LL ≥0 输入输出端 说明DV输出端,报警输出,布尔量256功 能 说 明如果 I1(K)-I2(K)>=HL 或者I1(K)-I2(K)<=-LL , {DV(K)=1;报警状态位AM=1; } 否则{DV(K)=0;报警状态位AM=0;}名称 速率报警所属库MacsCtrol.lib算 法 块 表 示名称(项名) 说明IN 输入端,浮点型 输入 输出端 说明 DV 输出端,布尔量 速率上限(HL) 浮点型;HL ≥0 持续周期数(LC)无符号长整形1≤LC ≤10参 数 项 定 义超速周期数(AP)无符号长整数 1≤AP ≤65535功 能 说 明如果输入信号的变化速率超过限制值,则置报警;超速时间限到时,如果无超速发生,则清报警。


和利时标准功能模块改进需求说明编写:校对:审核:目录1组合伺放功能块 (3)1.1功能块 (3)1.2功能说明: (4)1.3画面显示要求: (5)1.4操作器窗口: (6)1.5算法组态: (6)1.5.1变量声明: (6)1.5.2算法逻辑 (7)2顺控设备功能块 (9)2.1功能块 (9)2.2功能说明: (10)2.2.1.执行功能 (10)2.2.2.监视功能 (12)2.3画面显示要求: (13)2.4操作器窗口: (14)2.5算法组态: (15)2.5.1变量声明: (15)2.5.2算法逻辑 (17)3断路器功能块 (20)3.1功能块 (20)3.2功能说明: (21)3.2.1.执行功能 (21)3.2.2.监视功能 (22)3.4操作器窗口: (24)3.5算法组态: (25)3.5.1变量声明: (25)3.5.2算法逻辑 (27)4远操调节门功能块 (31)4.1功能块 (31)4.2功能说明: (31)4.3画面显示要求: (32)4.4操作器窗口: (32)4.5算法组态: (33)4.5.1变量声明: (33)1.5.2算法逻辑 (34)标准功能模块改进需求说明以表格的形式具体描述了系统提供的标准功能模块的图示、各项参数的定义和取值范围以及模块的功能说明:1组合伺放功能块1.1功能块名称组合伺放操作器组名控制算法算法块表示输入/输出端说明名称(项名)说明IN输入端,一般接调节器的输出,浮点型(0-100%)ZT输入端,位置反馈输入端,浮点型(0-100%)PV被控参数过程测量值,浮点型,工程单位FM输入端,外部切手动判断,布尔型;AO 输入端,自动开,布尔型;AC输入端,自动关,布尔型;DV开输出端,布尔型RV关输出端,布尔型SP输出端,PID 给定设定,浮点型AM输出端,手/自动状态,布尔型GZ执行机构故障(阀位反馈超限和跳变),布尔型内部参数项定义JC检修开关,布尔型MO手动开,布尔型MC手动关,布尔型MS 阀位指令设定,浮点型DL需要输出长脉冲的限制,缺省是8%;DB伺放死区,浮点型,缺省是2.5%;DB ≥0;T1伺服放大器脉冲宽度ms :缺省是300MS ;T2伺服放大器脉冲间隔ms :缺省是1S600MS ;T3允许粘连的时间S :缺省是5S ;。

HOLLYSYS1 130 11 HS_MATHLOGIC.LIB (2)1.1 (2)1.2 (4)1.3 (6)1.4D (9)1.5 (10)1.6 (11)1.7 (12)1.8 (14)1.9 (15)1.10 (16)1.11 (17)1.12 (18)1.13RS (20)1.14 (22)1.15 (23)1.16 (25)1.17 (27)2 HS_TIMEFIELD.LIB (29)2.1 (29)2.2 ( ) (31)2.3 (32)2.4 (34)2.5 (35)2.6 (38)2.7 (39)2.8 (40)2.9 (42)2.10 (43)2.11 (45)2.12 (49)2.13 (51)2.14 (52)3 HS_CTROL.LIB (55)3.1 (55)3.2 (59)3.3 (62)3.4 (64)3.5 2 (67) (73) (80) (87)3.9 (88)4 HS_ALMLIMSEC.LIB (91)4.1 (91)4.2 (92)4.3 (95)4.4 (97)4.5 (99)4.6 (100)4.7 (102)4.8 (103)4.9 (104)4.10 (105)4.11 (108)5 HS_SPECIAL.LIB (110)5.1 (110)5.2 (112)5.3 (114)5.4 (116)5.5 (118)5.6 (119)5.7 ( ) (121)5.8 ( ) (123)5.9 ( ) (126)5.10 (130)5 611. K K K=0 1 2 ...2. S S3 TS TS 10004. B(BOOL) R(REAL) C( ) I(INT) W(WORD) DW DWORD2. 0 13( )1 HS_MathLogic.lib1.1HSACCUMI1 R0.00 RSB2AV R 0.00 SS B3IV R 0.00MS LR 1.79769313486232E308MC LR14AV(K-1)<MS I1>0AV K =AV K-1 +I1(k SS=0AV(K-1)>MS I1>0AV K =AV K-1 +I1(k SS=1AV(K-1)<MS AV K =AV K-1 +I1(k SS=0RS=0AV(K-1)>MSAV K =AV K-1 +I1(kSS=1RS(k-1)=0,RS(k)=1LR:=AV(k-1);AV(k):=IV;SS:=0;5(bPositiveAccum=1) , I1 MC RS 0 MC SS 1RS 0 1 LR (LR=AV(k-1)), (AV(k)=IV) SS 01.2HSCHARC 10I1 R 0.002AV R 0.00ERR B0 1: ; 2:X; 3:3PS I 2 1<PS<=11X R111 X0 11Y R 111 Y0 114I1> 3.402823466E+38) OR (I1 <-3.402823466E+38)AV K =AV K-1 ERR=3(PS<2) (PS>11)AV K =AV K-1 ERR=1(X[i]) X[i-1]AV K =AV K-1 ERR=2X[PS]<>X[PS-1] AV(K)=(Y[PS]+(Y[PS]-Y[PS-1])*(I1(k)-X[PS])/(X[PS]-X[PS-1]))I1>X[PS ] X[PS]=X[PS-1] AV(K)= Y[PS]AV[k]=(Y[i-1]+(Y[i]-Y[i-1])*(I1-X[i-1])/(X[i]-X[i-1])) AV[k]=Y[i]AV[k]=Y[1]5I1 X X Y I1 AV X I1 X,Y X I18PIDPID1.3HSCMP(=) (<>) ( ) ( ) (>) (<) 6 1 6I1 R 1 0.00 I1R20.002DV B3CEQ B 10 CNE B 20 CGE B 30 CLE B 40 CGT B 50 CLT B 604I1=I2DV=1CEQ=1 I1<>I2DV=0I1<>I2 DV=1CNE=1I1=I2 DV=0I1 I2DV=1 CGE=1I1<I2 DV=0I1 I2DV=1 CLE=1 I1>I2 DV=0I1>I2DV=1 CGT=1 I1 I2DV=0I1<I2DV=1 CLT=1I1 I2DV=0 1 0 DV=02CEQ CNE 1 CEQI1=I2 DV=1561.4 DD HSD DDV IN DV 0 1IN B0 CK B 0 RS B 0 DSTB2DV B 0 RVB3RS K =0 DV K =0ST K =0 DV K =1CK K =1 CK K-1 =0DV(K)=IN(K)DV(k)=DV(K-1)4D CK DV(K)=IN(K) CK 1 0 RS ST DV 0 1 RV DV 51.5HSDCSSUMI1 B0.002AV B 0.003SL I0 1 24SL=0 I1(k-1)=0SL=1I1(k-1)=1RB=1I1<>I1(k-1) SL=2AV(k)=AV(k-1)+1RS=1AV(K)=05RS 1 AV 61.6HSDOWNIN B 0.002OUT B 034IN(k)=0 IN(k-1)=1 OUT(K)=1OUT(K)=05OUT 1 0 OUT 061.7HSDTIMESUM 0/1SOF RB 0 1I1 B 0.00RS B 02AV B 0.00 SOF AV1 T T#0ms ms3SOF I AV 0 0: 1 2,3 *RB B 0 0: 0 , 1:14I1=1 AV(k)=(L1(k-1)+TS)/factor AV1=L1(k-1)+TSRB=1I1=0 AV(k)=L1(k-1)/factor AV1(k)=L1(k-1)I1=1AV(k)=L0(k-1)/factor AV1(k)=L0(k-1)RS= 0RB=0I1=0AV(k)=(LO(k-1)+TS)/factorAV1(k-1)=L0(k-1)+TSL1 1L0 0TS (ms)factorSOF=0 factor=1000SOF=1 factor=100SOF=2 factor=100RS=1AV(k)=0 AV1(k)=T#0ms L1,L0 05RB=0 0RB=1 1 AV AV1 AV SOF SOF=0 AV SOF=1 AV SOF=2 AV SOF=3 AV AV1 msRS 1 AV AV161.8HSEXPTx R 0.00y R 0.002HSEXPT R 0.00 SOF3 ( )4HSEXPT=x y5X y61.9HSFILTERIN R 0.002AV R 0.003IS I 10 2<=IS<=10FM B 0 0-- 1-- 4FM=0AV(k)=( IN(K)+IN(K-1)+...+IN(K-(IS-1) ) )/ ISFM=1AV(k)=temp/(IS/3) Temp IS 1/3 1/3 1/35FM IS IS IS 10FM=0 ISFM=1 IS 1/3 1/3 1/3 AV61.10HSONEFOLD 15 Y=f(X)I1 R 0.002AV R 0.003VN I 2 1<PS<=16XV R 1 16X0 16YV R 1 16Y0 164I1>XV[VN]I1<XV[1]AV[k]=AV[k-1]XV[1] I1 XV[VN]AV[k]=YV[i-1]+(YV[i]-YV[i-1])*(I1-XV[i-1] ) / (XV[i]-XV[i-1])5I1 X XV YV I1 AV X I1 XV,YV XV I18HSPOLY Y=f(X)INR0.002AV R0.003CF R7 14AV=CF[1]+CF[2 IN+CF[3] IN 2+CF[4] IN 3+CF[5] IN 4+CF[6] IN 5+CF[7] IN 657 6x s x f in )( ,x ],0[ , 1 =span{1,2,x x })(x=-0.050454+1.312215x -0.4176912x1.12HSQOR 81 1 S9I1 B 1 0I2 B 2 0I3 B 3 0I4 B 4 0I5 B 5 0I6 B 6 0I7 B 7 0I8 B 8 02DV B 03SL B 0 S9 I 1 84SL=0 counter S9SL=1 counter=S9DV=1DV=0counter 151 S9 0SL=1 1 S9 1SL=0 1 S9 164S9=3 SL=01.13 RSRS HSRS RSI1 B 1 0I2 B 2 02DV B 1 0RV B 2 0 DV34I2=1 DV(k)=0 RV(K)=1I2=0 I1=1 DV(k)=1 RV(k)=0DV(k)=DV(k-1) RV(K)=RV(K-1)5DV 0DV 1RV DVI1 I2 DV RV1 0 1 00 1 0 11 1 0 10 0 * **61.14HSSLMTSUMSOF AH ALI1 R 0.00I1DQ B 0 0: ,1: RS B 02AV R 0.00 SOF AV1 T T#0ms ms34RS=0 I1DQ=1I1>AH I1<ALAV(k)=(LJ(k-1)+TS)/factorAV1=LJ(k-1)+TSLJTS (ms)factorSOF=0 factor=1000SOF=1 factor=100SOF=2 factor=100RS=1AV(k)=0 AV1(k)=T#0ms LJ 0AV(k)=AV(k-1)AV1(k)= AV1(k-1)5I1DQ 1 AH ALAV AV1 AV SOF SOF=0 AV SOF=1 AV SOF=2 AV SOF=3 AV AV1 msRS 1 AV AV161.15HSSLOPE 4 ( / ), 4IN R 0.00SW B 02AV R 0.003AP I 14CT(K) AP AV(K)=(2 IN(K)+10 IN(K-1)-10 IN(K-3)-20 IN(K-4))/(100AP TS)CT(k)=0IN[k-4]=IN[k-3];IN[k-3]=IN[k-2];N[k-2]=IN[k-1];IN[k-1]=IN[k];SW=1 CT(K)<APAV(K)=AV(K-1)CT(k)= CT(k-1)+1SW=0AV(k)=0 CT(k)=0IN[k-4]=IN[k-3]=IN[k-2]=IN[k-1]=IN[k]CT(K)5SW=0 0 SW=1AP TS CT CT<AP CT 1 CT AP CT 0YV R 1 16Y16 0 16ZV R 1 16Z16 14I1(k) XV[VN] I1(k)XV[1] I2(k) YV[VN] I2(K) YV[1]Z1[k]=ZV[i-1,j-1]+(ZV[i-1,j]-ZV[i-1,j-1])*(I2-YV[j-1])/(YV[j]-YV[j-1]) ;Z2[k]=ZV[i,j-1]+(ZV[i,j]-ZV[i,j-1])*(I2-YV[j-1])/(YV[j]-YV[j-1]);AV[k]=Z1[k]+(Z2[k]-Z1[k])/(XV[i]-XV[i-1])*(I1-XV[i-1]);AV[k]=AV[k-1]51 I1 X XV[i-1]<I1<XV[i], I2 YYV[j-1]<I2<YV[j]2 XV[i-1] Y-Z Z1 (YV[j-1], ZV[i-1, j-1])(YV[j],ZV[i-1, j])3 XV[i] Y-Z Z2 (YV[j-1], ZV[i, j-1])(YV[j],ZV[i, j)4 X-Z Z (XV[i-1], Z1) (XV[i], Z2)28,34,40,46,52,58,64,70,76,6(82),24,30,36,42,48,54,60,66,72,78,6(84),26,32,38,44,50,56,62,68,7 4,80,6(86),28,34,40,46,52,58,64,70,76,82,6(88));(* *)Y1(2) Y2(4) Y3(6) Y4(8) Y5(10) Y6(1)2 Y7(14) Y8(16) X1(1) 8 14 20 26 32 38 44 50X2(2) 10 16 22 28 34 40 46 52X3(3)X4(4)X5(5)X6(6)X7(7) 20 26 32 38 44 50 5662X8(8) 22 28 34 40 46 52 58 64x=7.5,y=2.5 Z1=20+(26-20) (2.5-2)/(4-2)=21.5;Z2=22+(28-22) (2.5-2)/(4-2)=23.5; Z=Z1+(Z2-Z1) (I1-X i-1)/(X i-X i-1)=21.5+(23.5-21.5) (7.5-7)/(8-7)=22.5Z=2 7.5+3 2.5=22.51.17HSUPIN B 0.002OUT B 034IN(k-1)=0 IN(k)=1 OUT(K)=1OUT(K)=05OUT 1 0 OUT 062 HS_TimeField.lib2.1HCURVE 8 Y=f(X) X ( )4294967295 8SS B 0RS B 02AV R 0.003PS I 1 1<=PS<=9TB DW 0 TB<=4294967295TE DW 0 TE<=4294967295TE TTL R 0 BL R 0.00T DW 1 90 19T<=4294967295Y R1 90.001 94TX<TETX=TX+TSSS=1 TimeOut =0TX TETX=TE TimeOut=1(SS(k)=1SS(k-1)=0) (SS(k)=1 RS(k)=1)TX=TB TimeOut=0 RS=0K(i)=(Y(i+1)-Y(i))/(T(i+1)-T(i))AV(K)=Y(i)+K(i)*(TX-T(i))T[i] T[i+1] TXY[i] T[i] Y[i+1] T[i+1] K[i]5Y=f(X) XPS 1<=PS<=9 PS-1 TX RS , TimeOut 1SS 0 1 SS=1 RS=1 TX=TB TimeOut=0 RS=0SS=1 TimeOut=0TX TE TX TX TE TX=TE TimeOut=1TX T TX T[i] T[i+1]K(i)=(Y(i+1)-Y(i))/(T(i+1)-T(i)) AV(K)=Y(i)+K(i)*(TX-T(i))i=1 2 3 ...8 K(i)T TXKG*S AV(S)= ————— IN(S) 1+TC*SAV(K)=TC)TS (1)-AV(K TC ))1K (IN )K (IN (KG6PID2.3HSFOPINR0.00TCtTC R 1KG R 12AV R 0.003 ( )4562.4HSFSMITHIN R 0.00 KG R 1 TC R 1LGT R11<=LGT<=202AVR0.00tTC3 ( ) 45TC>0AV(S)=)S (IN )1(1S TC KGLGT S eZC1-Z D1)1()(IN )(P )(P )(AV )(IN )(AV )(D LGTZ Z Z Z Z Z Z Z:TCTSC1 e,)1(KG D1TCTS eP(K) : P(K)=C1P(K-1)+D1IN(K-1) AV(K)=P(K)-P(K-LGT)TC=0 AV(K) = IN( K-LGT )62.5HSINTGSP R 0.00PV R 0.00TS B 0TP R 0.00TB R 0.5KI R 1TI R 1DI R 0OT R 100OB R 0.00OTR R 100AD B0 0-- 1--2AV R 0.003 ( )4RM1 AV(K)=AV(K-1)+TB KI IN(k)/TI (sp-pv)AV(K)=AV(K-1)2 AV=TP52.6HSLDLGIN R 0.00KG R 1BT R 1LGT R 12AV R 0.003 ( )4LGT TS+BT BTAV(K)= ——— AV(K-1) + KG ——— IN(K) – KG ——— IN(K-1)TS+LGT TS+LGT TS+LGT5/1+BT SAV(S)=KG ————— IN(S)1+LGT SLGT TS+BT BTAV(K)= ——— AV(K-1) + KG ——— IN(K) – KG ——— IN(K-1)TS+LGT TS+LGT TS+LGTt62.7HSLGCMP 1 0IN R 0.00HL R 1LL R 12DV B 03 ( )4DV=1IN>HLDV=0IN<LL56 ( )2.8HSRAMPHD B 0DE B 0RST B 02AV R 0.003IR R 1DR R 1TL R 100BL R 0.00IV R 0.004RST=0 HD=1AV(K)=AV(k-1)RST(K)=1 RST(k-1)=0AV(K)=IV(K)DE=1 AV(K)= AV(K-1) +IR TSHD=0 RST(K)=1RST(k-1)<>0DE=0 AV(K)=AV(K-1)-DR TSAV(K)>TLAV(K)=TLAV(K)<BLAV(K)=BL5AV(K)>TL AV(K)=TL AV(K)<BL AV(K)=BL 62.9HSSOPIN R 0.00 KG R 1 TF R 1 1 TS R212AV R0.003 ( ) 45AV(S)=1)S 1)(TS S (TF )S (IN KG)2()1()()( k AV c k AV b k IN a k AV))((2TS circle TF circle circle KG a))((2)(TS circle TF circle TSTF TS TF circle b))((TS circle TF circle TSTF ccircle62.10HSSSMITHtTCIN R 0.00 KG R 1 T1 R 1 1 T2 R 2 1LGT R11<=LGT<=202AV R0.003 ( ) 45AV(S)=)S (IN )1(1)S 1)(T2S (T1KGLGT S eZC2-C1Z -Z D2Z D1)1()(IN )(P )(P )(AV )(IN )(AV )(D 2LGTZ Z Z Z Z Z Z Z:T2TS T1TSC1ee ,)T2TS T1TS (eC2T1T2)1T2(e )1T1(eKG D1T2-TS T1-TST1T2))1(T1e )1(eT2e(KG D2T1TS T2-TS T2-TS T1-TSeP(K)P(K)=C1P(K-1)+C2P(K-2)+D1IN(K-1)+D2IN(K-2) AV(K)=P(K)-P(K-LGT) 62.11HSSIMER5SS R 0 RS B 0 TCR12DV B3TT I 0 1 2 3 4 54TTSS 0 1 SS TDV1SS 0 1 DV SS DVT DV SS 02SS 0 1 SS DVT3SS 0 1 T DVSS 04SS 0 1 DVSS T DVRS=05SS 0 1 SS DVRS(k-1)=0,RS(k)=1DV=0TC TS5SS 0 1 DV SS T SS 1 DV SS 0 RS DVSS 0 1 DV T RS DV SSSS 0 1 T DV SS 0 RS DV。


254附录 : HollySys 标准功能模块说明本附录以表格的形式具体描述了系统提供的标准功能模块的图示、各项参数的定义和取值范围以及模块的功能说明。
为清楚起见,先对描述中要用到的公共符号作出规定,在以后的说明中将不再赘述。
K :K 在离散化公式中表示采样序号,K=0,1,2,...; S :S 是拉普拉斯算子;TS :TS 是运算周期,单位为秒。
其值为实际工程组态中所设定的程序执行调度周期;1.控制运算名称流量积算(积算)所属库MacsCtrol.lib算 法 块 表 示名称(项名) 说明I1模拟量输入,浮点型 RS 复位信号,布尔量 AV 积算结果,输出端,浮点型 输入 输出端 说明SS选择结果,输出端,布尔量 积算初值(IV) 浮点型积算总量(MS) 长浮点型, 初值为64为浮点数, 1.79769313486232E308 参数项 定义仪表因子(MC)长浮点型255名称流量积算(积算)所属库MacsCtrol.lib功 能 说 明用于对模拟量输入信号,每个运算周期进行累计。
当复位信号RS 无效时{AV(K)=AV(K-1)+ I1(K)*MC ;其中AV(0)=IV ; 如果AV(K)<MS ,则 SS=0; 否则{ SS=1AV(K)=AV(K)-MS ; } }当RS 从0变到1时{上一次的输出结果值LR = AV(K);AV(K)=IV ;SS=0; }其中:MC 与处理周期和时间单位有关。
名称偏差报警所属库MacsCtrol.lib算 法 块 表 示名称(项名) 说明I1输入端1,浮点型 I2 输入端2,浮点型HL 输入端,正偏差限,浮点型;HL ≥0 LL 输入端,负偏差限,浮点型;LL ≥0 输入输出端 说明DV输出端,报警输出,布尔量256功 能 说 明如果 I1(K)-I2(K)>=HL 或者I1(K)-I2(K)<=-LL , {DV(K)=1;报警状态位AM=1; } 否则{DV(K)=0;报警状态位AM=0;}名称 速率报警所属库MacsCtrol.lib算 法 块 表 示名称(项名) 说明IN 输入端,浮点型 输入 输出端 说明 DV 输出端,布尔量 速率上限(HL) 浮点型;HL ≥0 持续周期数(LC)无符号长整形1≤LC ≤10参 数 项 定 义超速周期数(AP)无符号长整数 1≤AP ≤65535功 能 说 明如果输入信号的变化速率超过限制值,则置报警;超速时间限到时,如果无超速发生,则清报警。

![[工作总结]杭州和利时培训总结](https://img.taocdn.com/s1/m/ada982ff185f312b3169a45177232f60ddcce78e.png)
[工作总结]杭州和利时培训总结杭州和利时培训总结八月初我有幸被派去杭州和利时公司参加DCS MACS 系统的培训,通过为期两周的系统培训学习,更加深了我对DCS的系统的了解和深刻理解,对DCS控制的本质流程有了更深入的理解和把握,并初步学会和系统的简单设计,安装和组态及故障处理维护等相关的工作,希望自己再回来在日常的工作中更要抓住一切机会将理论结合实际工厂应用,不断提高自己的实际应用能力和处理问题的能力。
主要学习内容如下:两周的培训主要是公司培训部对客户进行集中的培训,培训采用边讲课边上机实验的方式进行,这种方法能很好的学以致用提高能力,培训部工程师尚峰主讲。
MACS的体系机构及硬件介绍第一天主要介绍杭州和利时DCS的基本概念和体系结构。
DCS即集散控制系统,又称分布式控制系统,它的主要基础是4C技术,计算机控制通讯显示等技术。
DCS通过通信网络把现场仪表检测到物理量传送到DCS,然后通过DCS对现场的执行机构发出相应的信号执行响应的动作,完成一个控制任务。
和利时MACS系统是有以太网和现场现场总线技术的控制网络连接的工程师站,操作员站,现场控制站,通讯控制站,打印服务站,数据服务器等组成的综合的自动化控制系统,完成中型大型分布式控制系统,大型数据采集监控系统(SCADA).。
和利时MACS系统硬件有工程师站,操作员站,现场控制站,通讯控制站,打印服务站,数据服务器等组成。
DCS站的概念,站是系统的独立环节,物理上独立的设备,网络的一个独立通信节点,完成以特定的任务。
工程师站:主要完成(1)控制策略组态,人机界面组态及相关参数设置(2)现场控制站的下装和在线调试操作员人机界面修改,(3)运行操作员软件后能作为操作员站使用。
操作员站:(1)各种监视信息的显示打印和查询,(2)通过键盘鼠标或触摸屏等人机设备,修改相关的控制参数,进行系统的人工干预,达到预期的控制目的。
通信站:通信站作为与其他系统的接口可以连接企业的ERP系统和信息系统,最终为用户提供最好的产品和服务。

一、软件界面1.看快速入门指令包括两种调用方法:使能运算符调用和功能块调用,在PowerPro的指令系统中,一些标准指令,诸如初等运算指令、比较指令、移位指令、赋值指令、类型转换指令、逻辑运算指令等,都应采用使能运算符形式调用。
功能块和使能运算符区别:在调用功能块指令时,,需要对该功能块进行实例声明,与变量定义类似,需要定义一个变量,数据类型自动默认为该功能块类型,一个程序中假如用到多个该指令,其声明的变量应不同。
F4功能键:编译信息区位于程序区的下方,用于实时显示程序关于编译、错误、警告或比较的消息,如图2-2-6所示。
双击编译信息区中的任一条消息,可以自动跳到编辑器中的相关行,以便查找相关信息。
通过“编辑”/“后错误”(F4功能键)和“编辑”/“前错误”(Shift+F4组合功能键)命令可以在错误消息行中快速跳转。
2.F2功能键:在编辑窗口中的当前光标位置,按F2功能键,会自动弹出当前位置可以插入的待选项,例如运算符、函数、功能块和变量类型等列表。
SHIFT+F2可用于改写。
3.对象组织器:主界面左侧的竖条窗口称为对象组织器,由“程序”、“数据类型”、“视图”和“资源”四个选项卡组成,包含了一个工程所必需的基本对象。
1)程序选项卡用于对程序的管理。
诸如新建子程序、新建中断服务程序等都在程序选卡中完成。
2)数据类型选项卡完成对自定义数据类型功能。
PowerPro支持用户自定义的数据类型。
3)视图选项卡完成视图功能。
4)资源选项卡完成PLC硬件配置、添加指令、工程选项及设置中断等功能。
4.变量声明区:变量声明区位于对象组织器的右上角。
PowerPro将数据分为地址和变量两大类。
变量可以不指定具体地址,直接用符号来表示,诸如“start”、“run”,同一符号的变量表示同一个变量。
变量与地址不同,变量在使用时需要定义,而地址可以直接引用。
变量声明区就是用于显示所有定义的变量。
变量的定义有两种方式。
和利时标准功能模块改进需求说明
编写:
校对:
审核:
目录
1 组合伺放功能块 (3)
1.1 功能块 (3)
1.2 功能说明: (4)
1.3 画面显示要求: (5)
1.4 操作器窗口: (6)
1.5 算法组态: (6)
1.5.1变量声明: (6)
1.5.2 算法逻辑 (7)
2 顺控设备功能块 (9)
2.1 功能块 (9)
2.2 功能说明: (10)
2.2.1.执行功能 (10)
2.2.2. 监视功能 (12)
2.3 画面显示要求: (13)
2.4 操作器窗口: (14)
2.5 算法组态: (15)
2.5.1变量声明: (15)
2.5.2 算法逻辑 (17)
3 断路器功能块 (20)
3.1 功能块 (20)
3.2 功能说明: (21)
3.2.1.执行功能 (21)
3.2.2. 监视功能 (22)
3.4 操作器窗口: (24)
3.5 算法组态: (25)
3.5.1变量声明: (25)
3.5.2 算法逻辑 (27)
4远操调节门功能块 (31)
4.1 功能块 (31)
4.2 功能说明: (31)
4.3 画面显示要求: (32)
4.4 操作器窗口: (32)
4.5 算法组态: (33)
4.5.1变量声明: (33)
1.5.2 算法逻辑 (34)。