汇川故障排除表
- 格式:docx
- 大小:194.30 KB
- 文档页数:6

汇川伺服735常见问题及解决方法
1. 故障报警:
问题:伺服驱动器上的报警灯亮起。
解决方法:查询驱动器的用户手册,根据报警代码查找可能的原因和解决方案。
2. 定位不准:
问题:伺服电机运行过程中位置偏差较大。
解决方法:
检查机械系统是否有间隙或是磨损。
检查编码器的精度和是否安装正确。
调整控制参数,如PID参数。
3. 振动过大:
问题:伺服电机运行过程中发生振动。
解决方法:
检查是否安装稳固,是否有机械不平衡或间隙。
调整驱动器的加速度、减速度参数。
检查负载是否超过电机规格。
4. 过热故障:
问题:伺服电机运行一段时间后过热。
解决方法:
检查散热器是否堵塞或者风扇是否正常工作。
确认环境温度是否适宜。
检查电机负载是否正常。
5. 通讯故障:
问题:与上位机或其他设备通讯异常。
解决方法:
检查通讯线路是否有损坏、接触不良等问题。
确认通讯参数(如波特率、地址等)是否设置正确。
检查控制程序是否有错误。
6. 启动失败:
问题:伺服驱动器无法正常启动。
解决方法:
检查电源是否正常、接线是否正确。
查看是否有故障报警,并根据手册进行排查。
检查配置参数是否正确。
虽然这些解决方案是一般性的,但它们可能对您解决具体问题时提供一些思路。
对于特定型号的设备,建议您查询设备的用户手册或联系
厂家的技术支持获得更准确的帮助。

汇川变频器故障代码表一、引言汇川变频器是一种常用的电力传动设备,广泛应用于工业生产过程中的电机控制。
然而,由于各种原因,汇川变频器在使用过程中可能会出现故障。
为了方便用户能够快速地判断和解决故障,汇川公司提供了一份详细的故障代码表。
本文档将列举和解释汇川变频器的故障代码,帮助用户识别和处理故障。
二、汇川变频器故障代码表汇川变频器故障代码表包含了多种故障类型和对应的错误代码。
下面将逐一介绍每一种故障类型,并提供相应的解决方案。
1. 过载保护故障错误代码:E001故障描述:变频器输出功率超过额定值,导致过载保护功能启动。
解决方案:降低负载或增加变频器的额定功率。
2. 过热保护故障错误代码:E002故障描述:变频器内部温度过高,导致过热保护功能启动。
解决方案:检查冷却系统是否正常工作,清理散热片,确保变频器周围通风良好。
3. 过电流保护故障错误代码:E003故障描述:变频器输出电流超过额定值,导致过电流保护功能启动。
解决方案:检查负载是否过大或存在短路情况,修复或更换故障零部件。
4. 电压过高保护故障错误代码:E004故障描述:输入电压超过变频器额定值,导致电压过高保护功能启动。
解决方案:检查输入电压是否稳定,适当进行调整或更换电源。
5. 电压过低保护故障错误代码:E005故障描述:输入电压低于变频器额定值,导致电压过低保护功能启动。
解决方案:检查输入电压是否稳定,适当进行调整或更换电源。
6. 缺相保护故障错误代码:E006故障描述:输入电压中存在缺相现象,导致缺相保护功能启动。
解决方案:检查输入电源是否正常,确保三相电流均衡,修复或更换故障零部件。
7. 过载保护故障错误代码:E007故障描述:变频器输出过流保护功能启动。
解决方案:检查负载是否正常,确保传动系统没有堵塞或机械故障。
8. 输入相序保护故障错误代码:E008故障描述:输入电压中的相序错误,导致输入相序保护功能启动。
解决方案:检查输入电压的相序是否正确,调整相序或更换电源。

汇川伺服电机报警代码一览表在工业自动化领域,汇川伺服电机凭借其出色的性能和稳定性,得到了广泛的应用。
然而,在使用过程中,可能会遇到各种报警情况。
了解这些报警代码的含义和对应的解决方法,对于快速排除故障、恢复生产至关重要。
下面为您详细列出汇川伺服电机常见的报警代码。
报警代码 E01:过速报警当电机的转速超过了设定的最大允许值时,就会触发 E01 报警。
这可能是由于给定速度过高、负载突变或者电机参数设置不正确等原因引起的。
解决方法是检查速度给定值,确保其在合理范围内;检查负载情况,是否存在卡死或突然增大的负载;重新确认电机的参数设置是否与实际电机匹配。
报警代码 E02:主电路过压E02 报警通常表示主电路的电压超过了正常范围。
可能的原因有电源电压过高、制动电阻故障或者再生能量过大。
首先,需要测量电源电压,看是否超出了电机的额定电压范围。
若电源正常,检查制动电阻是否损坏或接线不良。
如果是再生能量过大导致的,可能需要调整加减速时间或者增加制动电阻的容量。
报警代码 E03:主电路欠压主电路电压低于允许的最小值时,会出现 E03 报警。
这可能是由于电源故障、电源线路接触不良或者电源容量不足引起的。
解决措施包括检查电源输入是否正常,紧固电源线路的连接;如果电源容量不足,需要更换更大容量的电源。
报警代码 E04:过载当电机的负载超过了其额定负载能力时,会触发 E04 报警。
可能是由于机械部件卡死、负载过大或者电机选型不当。
此时,需要检查机械传动部分是否顺畅,减轻负载;确认电机的选型是否能够满足实际负载需求,如果不能,需要更换更大功率的电机。
报警代码 E05:电机过热E05 报警表示电机的温度过高。
可能是由于环境温度过高、散热不良、长时间过载运行或者电机内部故障。
首先要改善电机的工作环境,加强通风散热;检查电机的风扇是否正常运转;避免长时间过载运行。
如果问题仍然存在,可能是电机内部出现故障,需要进行维修或更换。
报警代码 E06:编码器故障编码器是用于反馈电机位置和速度信息的重要部件。
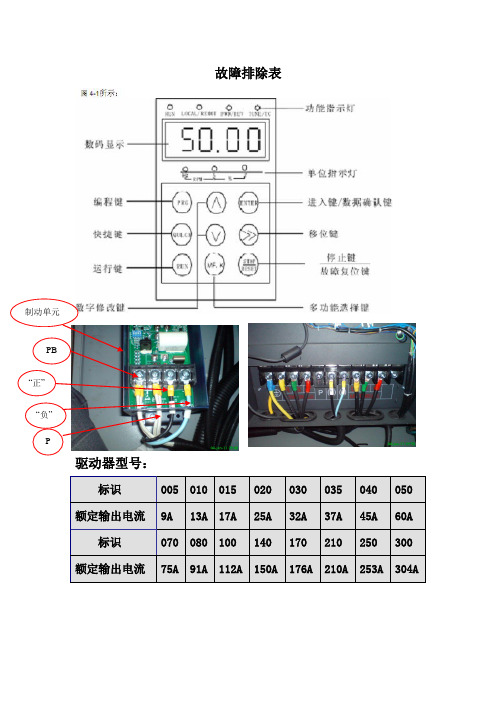
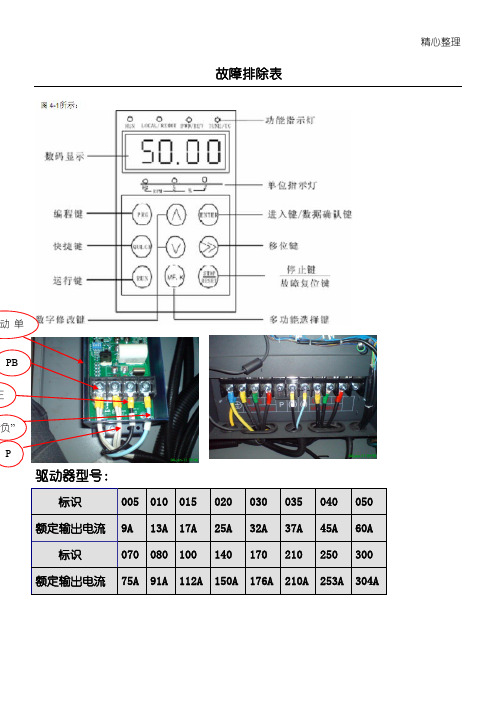
精心整理故障排除表动单PB正“负”P驱动器型号:标识005 010 015 020 030 035 040 050额定输出电流9A 13A 17A 25A 32A 37A 45A 60A标识070 080 100 140 170 210 250 300额定输出电流75A 91A 112A 150A 176A 210A 253A 304A驱动器的工作原理驱动器的工作原理如图1-1所示。
驱动器输入为交流市电,其电压波形为U I ,如图所示;交流市电经D1~D6六只二极管组成的三相整流桥整流及电容C1、C2滤波成直流电,其电压波形为U DC ;直流电再经过VT1~VT6六只IGBT 及续流二极管组成的逆变模块逆变成频率可变、电压可变的交流电,其电压波形U O 为脉宽调制波。
通用逆变模块逆变模块由六只IGBT 管和六只续流二极管组成。
通过控制IGBT 管的开关顺序和开关时间,驱动器将直流电变成频率、电压可变的交流电,电压波形为脉宽调制波。
缓冲电阻R1与接触器触点开关J1在驱动器合上电的瞬间,滤波电容器C1、C2上的充电电流比较大。
过大的冲击电流将可能导致三相整流桥损坏;同时,也使电源电压瞬间下降而受到“污染”。
为了减小冲击电流,在驱动器刚接通电源的一段时间里,电路内串入缓冲电阻R1,以限制电容器C1、C2上的充电电流。
当滤波电容器C1、C2充电电压达到一定程度时,令J1接通,将R1短路掉。
时,制第一:如果是在自学习过程中报警,请检查电机线,U,V,W互相之间短路或对地短路。
请用万用表检查U,V,W,任意两相之间阻值相差不超过为0.3—0.5Ω。
测量U,V,W是否对地短路,U,V,W任意一相对地之间是0Ω,如果测量出来有电阻则电机对地短路。
第二:响应过快,出现瞬时过冲现象,导致电流超过驱动器允许最大电流,请查看故障时电流F922,调整斜率试一下。
必要时可适当降低转速。
第三:电机退磁或咬死或泵与电机之间卡死,导致电流过大。
目的:对电动汽车服务能够快速的定位问题,解决问题。
思路:供电——反馈,排查问题前先沟通故障如何出现、思考问题出现同什么有关联,根据故障顺藤摸瓜,实在不行找医生;仅适合我;主电机(TM):作用:1、驱动、制动时反馈一、主接触器粘连;前提条件:在不报任何故障的情况下;判断方法:1、按下高压急断,观察仪表显示SOC电压百分比是否下降,下降证明高压急断有效,则反之;2、在高压急断无效的情况下,查看面板显示母线电压、以及监控母线电压U0-02;U0-77=1或0;当U0-77=0时,主接触器断开,还有高压,查看空能码U0-78、U0-79都是6,证明附件粘连或者主接粘连;3、拔掉快速熔断器,用万用表测量“+”与“-”有无电压,若有电压,证明是主接触器粘连或者附件接触器粘连;4、打开检修口,测量驱动板上的“P”与超级电容端的动力线“+”之间是否导通,导通证明主接粘连,则反之;二、踩油门不走;前提条件:在不报任何故障的情况下;判断方法:1、夏天高温天气情况下,查看U3-00,显示电机器驱动器的温度是多少,VCU 保护温度为78度,当温度达到78度时,VCU停止发送指令驱动;2、让司机踩下制动,查看功能码U0-10的值,常态是0.22V左右,当踩下制动时AI2电压升高,范围2<U0-10<5时证明制动有效,目前采用的是VCU给定的制动力矩,可以用后台软件监控U0-75是否给定,我司采取的策略是制动模拟量优先于油门模拟量;主要判断制动模拟量是否正常,若不正常排查35PIN接插件第9PIN是否扩孔、虚接;3、让司机踩下油门,查看功能码U0-11的值,常态是0.53V左右,当踩下油门的时AI3电压升高,范围是6<U0-11<10时证明油门模拟量有效,小于2V时证明油门模拟量无效,主要判断油门模拟量是否正常,若不正常排查35PIN接插件第8PIN是否扩孔、虚接;4、查看功能码U0-78=1、U0-79=1,(1、驱动2、发电3、待机、5、高压急断有效、6、停机)整车VCU给定指令是否正确;5、若指令都正确,有高压、有电流输出,检查电机主减、电机(转矩、指令都正确,出现电机卡死现象,用前钳流表时用交流挡测输出电流,直流挡测是0A,面板显示有输出电流,)、旋变线是否正确;6、上电运行挂前进挡,但车运行是倒车状态,主电机旋变角度有问题;7、若整车VCU发送指令与接收指令都正常,电流输出、高压正常,挂档运行车不走,改成面板控制,检测U2-06、07、08、09电流是否发散,排查电机输出是否正常;三、CAN故障;前提条件:没有CAN卡查看有无输出报文判定方法:1、查看功能码U0-76的值,范围是0~256,是VCU发给电机驱动器的给定报文,若值没有变法证明,VCU没有给定,没有数据输出;2、查看U0-78、79,现场遇到的是U0-79=0、U0-78=6,可以判断是整车控制器没有发送指令,而我们电机驱动器有反馈;证明整车控制器有问题;3、报CAN故障,(ERR116、117、118、119),检测外部CAN终端电阻,五合一有做终端,35PIN接插件第13PIN、14PIN之间的电阻15PIN、16PIN之间的电阻为120欧,60KW深混的是整车控制器作为终端,检测35PIN接插件第31、32、33、34之间的阻值120欧;4、在外部都排查完的时候,检查机器内部接插件、跟换控制板尝试一下;四、ERR02、04故障故障现象:1、偶尔报ERR02、04故障,处理方法:1)、目前市场出现的情况是运行中报故障,大部分都是原因是接插件松动、虚接、(驱动板到模块、霍尔电流检测部分的接插件);2)、高温下,断电在上电松手刹开管工作报ERR04故障,原因是:控制板上电流比较部分芯片耐温值过低,报出的故障,目前已经用软件解决,版本号:0.98;3)、缓冲电阻与低压线束捆扎在一起,目前解决方法是分开捆扎,具体如何捆扎后续会给定准确的扎线方法;故障现象:2、上电松手刹就报ERR02、04;处理方法:1、出现这种现象,断开所有电源,打开检修口,检测电机动力线U、V、W 是否对地短路;2、若判断电机对地短路,把主电机动力线U、V、W脱开,改B0-02=0(改为面板控制)、D4-00=0(=0时为速度控制,=1为转矩控制)、B0-08=10Hz(预置频率)、B2-09=10(速度控制转矩上限);BA-14=0(改成0的目的是屏蔽ERR13故障),短暂运行,看看电机驱动器是否报故障,切记不能大转矩,大转速长时间运行;主要判断电机驱动器是否正常;五、ERR07故障故障现象:车运行过程中报过压故障,故障排查:1、主电机旋变角度,C4-10值调试不准确;调试标准:匀速跑60码或者70时观察母线电压的下降快慢,正常情况下1S下降1V(可以参考给宇通服务人员的电角度调试文档);2、郑州公交60KW深混情况是,用后台监控,在行驶的过程中,电脑后台监控掉电不运行,面板报ERR07故障,排查是整车24V继电器瞬间跳开又闭合造成;??3、在高速路行驶,温度过高,整车VCU保护,电机驱动关管(IGBT不工作)不工作,产生反电动势,给机器内部电容,报ERR07故障,故障时过压点为585V;4、正常发电SOC显示94%,但是也有遇到发电SOC显示96%,报故障,目前解决方法是更新整车控制器程序;5、接触器断开(回馈的能量流到直流母线电容端,造成U0-02偏大)。
运控产品现场检测指导一、目的:本检测指导适用于服务人员在现场排查/判断机器故障时,准确定位问题,避免直接换机造成的返回无法复现问题、延长问题的处理进度。
本指导只是对伺服产品(IS600/IS620系统)的基本的检测和一些出现频率比较高的故障的检测判断方法。
二、需要的工具:万用表、用户调试板、伺服电机、编码器线缆、动力线(UVW线);三、简单故障排查:注1:接线错误:1、UVW相序是否正确?2、编码器线缆是否为标准线缆?客户自制?3、整个系统PE线有无连接在一起?4、CN1端子接线是否松脱?注2:1、查看H00-00的显示与电机铭牌是否一致?2、查看电机型号与驱动器型号(H01-02)是否满足用户手册简易版第7页中伺服系统配置规格一览表的要求。
注3:如果是抱闸电机,需先通24V打开抱闸。
三、详细故障排查:1、硬件故障排查注4:主回路的检测方法如下:整流电路:a、使用万用表的二极管档位,红表笔分别点三相输入端子(R、S、T),黑表笔点“+”,测量整流部分三相上桥是否正常,万用表显示在0.4V左右为正常,短路或开路说明损坏,如图1所示。
图1、整流部分三相上桥测量示意图b、使用万用表的二极管档位,红表笔点“-”,黑表笔分别点三相输入端子(R、S、T),测量整流部分三相下桥是否正常,万用表显示在0.4V左右为正常,短路或开路说明损坏,如图2所示。
图2、整流部分三相下桥测量示意图a、使用万用表的二极管档位,红表笔分别点三相输出端子(U、V、W),黑表笔点“+”,测量逆变部分三相上桥是否正常,万用表显示在0.4V左右为正常,短路或开路说明损坏,如图3所示。
图3、逆变部分三相上桥测量示意图b、使用万用表的二极管档位,红表笔“-”,黑表笔分别点三相输入端子(U、V、W),测量整流部分三相下桥是否正常,万用表显示在0.4V左右为正常,短路或开路说明损坏,如图4所示。
图4、逆变部分三相下桥测量示意图a、使用万用表的二极管档位,红表笔点C,黑表笔点P(+),测量制动管的续流二极管是否良好,万用表显示在0.4V左右为正常,短路或开路说明损坏,如图5所示。
故障排除表制动单PB““P驱动器型号:标识005010015020030035040050额定输出电流9A13A17A25A32A37A45A60A 标识070080100140170210250300驱动器的工作原理驱动器的工作原理如图1-1所示。
驱动器输入为交流市电,其电压波形为UI,如图所示;交流市电经D1~D6六只二极管组成的三相整流桥整流及电容C1、C2滤波成直流电,其电压波形为UDC;直流电再经过VT1~VT6六只IGBT及续流二极管组成的逆变模块逆变成频率可变、电压可变的交流电,其电压波形UO为脉宽调制波。
U I ~OU图1-1 通用交-直-交电压型驱动器原理框图整流桥整流部分由六只整流管组成三相整流桥,将电源的三相交流全波整流成直流。
若电源的线电压为UL ,则三相全波整流后平均直流电压UD的大小为:UD=1.35×UL我国三相电源的线电压为380V,故全波整流后的平均电压:U=1.35×380V=513V。
D逆变模块逆变模块由六只IGBT管和六只续流二极管组成。
通过控制IGBT管的开关顺序和开关时间,驱动器将直流电变成频率、电压可变的交流电,电压波形为脉宽调制波。
MOSFET的高输入阻抗和GTR的低导通压降两方面的优点。
GTR饱和压降低,载流密度大,缓冲电阻R1与接触器触点开关J1在驱动器合上电的瞬间,滤波电容器C1、C2上的充电电流比较大。
过大的冲击电流将可能导致三相整流桥损坏;同时,也使电源电压瞬间下降而受到“污染”。
为了减小冲击电流,在驱动器刚接通电源的一段时间里,电路内串入缓冲电阻R1,以限制电容器C1、C2上的充电电流。
当滤波电容器C1、C2充电电压达到一定程度时,令J1接通,将R1短路掉。
制动单元与制动电阻工作原理一:制动单元原理: 制动单元由大功率晶体管GTR及其驱动电路构成。
其功能是为放电电流环节电容器在规定的电压范围内储存不了或者内接的制动电阻来不及消耗掉而使直流部分“过压”时,需要加外接制动组件,以加快消耗再生电能的速度。
驱动器型号:标识 005 010 015 020 030 035 040 050额定输出电流9A 13A 17A 25A 32A 37A 45A 60A 标识 070 080 100140170210250300额定输出电流75A 91A 112A 150A 176A 210A 253A 304A故障排除表停止■ 捡威私常槿制动单元---------------- 窖功修诜卅港驱动器的工作原理驱动器的工作原理如图1-1所示。
驱动器输入为交流市电,其电压波形为U,如图所示;交流市电经D1〜D6六只二极管组成的三相整流桥整流及电容C1、C2滤波成直流电,其电压波形为U DC;直流电再经过VT1〜VT6六只IGBT及续流二极管组成的逆变模块逆变成频率可变、电压可变的交流电,其电压波形U O为脉宽调制波。
图1-1 通用交一直一交电压型驱动器原理框图整流桥整流部分由六只整流管组成三相整流桥,将电源的三相交流全波整流成直流。
若电源的线电压为U L,则三相全波整流后平均直流电压U D的大小为:U D=XU L我国三相电源的线电压为380V,故全波整流后的平均电压:U D=X380V=513V O逆变模块逆变模块由六只IGBT管和六只续流二极管组成。
通过控制IGBT管的开关顺序和开关时间,驱动器将直流电变成频率、电压可变的交流电,电压波形为脉宽调制波。
IGBT(Insulated Gate Bipolar Transistor),绝缘栅双极型晶体管,是由BJT(双极型三极管)和MOS绝缘栅型场效应管)组成的复合全控型电压驱动式功率半导体器件,兼有MOSFE的高输入阻抗和GTR的低导通压降两方面的优点。
GTR饱逆变单元交流电源输入输入滤波整流单元储能滤波电流检测M3〜和压降低,载流密度大,但驱动电流较大;MOSFE 驱动功率很小,开关速度快, 但导通压降大,载流密度小。
IGBT 综合了以上两种器件的优点,驱动功率小而 饱和压降低。
非常适合应用于直流电压为 600V 及以上的变流系统如交流电机、 变频器、开关电源、照明电路、牵引传动等领域。
缓冲电阻R1与接触器触点开关J1在驱动器合上电的瞬间,滤波电容器 C1、C2上的充电电流比较大。
过大的冲击电流将 可能导致三相整流桥损坏;同时,也使电源电压瞬间下降而受到“污染”。
为了减小冲击电流,在驱动器刚接通电源的一段时间里,电路内串入缓冲电阻 R1,以限制电容器 C1、C2上的充电电流。
当滤波电容器 C1、C2充电电压达到一定程度时,令 J1接通,将R1短路掉。
制动单元与制动电阻工作原理一:制动单元原理:制动单元由大功率晶体管 GTR 及其驱动电路构成。
其功能是为放电电流 环节电容器在规定的电压范围内储存不了或者内接的制动电阻来不及消耗掉而使直流 部分“过压”时,需要加外接制动组件,以加快消耗再生电能的速度。
二:制动电阻原理:电动机在工作频率下降过程中,将处于再生制动状态,拖动系统的动能要反馈到直流电路中,使直流电压 UD 不断上升,甚至可能达到危险的地步。
因此,必须将再生到直流电路的能量消耗掉,使UD 保持在允许范围内。
制动电阻就是用来消耗这部分能量的。
三:制动单元+电阻:电动机在工作频率下降过程中,将处于再生制动状态,拖动系统的动 能要反馈到直流电路中,使直流电压UD 不断上升,甚至可能达到危险的地步。
因此,必须将再生到直流电路的能量消耗掉,使 UD 保持在允许范围内。
制动电阻就是用来消.丄 :SEiFSZZE-F z 庶J--IQJT Q” *t * MmmknJin U_ 'IS 二耗这部分能量的。
制动单元由大功率晶体管GTR及其驱动电路构成。
其功能是为放电电流IB 流经提供通道。
制动电阻选型不合理,有可能导致驱动过电流报警ERR2,3,4,和ERR5,6,7过电流电压报警。
ERR2,3,4是过电流,有可能是制动电阻阻值过小。
请按照手册选择阻值ERR,5,6,7 是过电压报警,有可能是制动电阻阻值过大,请按照手册选择阻值旋转变压器编码器的原理旋转变压器编码器,顾名思义,是一个旋转的变压器,通过给原边励磁,可理解为马达的定子,转子则有两副绕组,一副正弦绕组,一副余弦绕组)。
所不同的是:定子与转子有匝数比的关系。
Err02 Err03 Err04 过电流第一:如果是在自学习过程中报警,请检查电机线,U,V,W互相之间短路或对地短路。
请用万用表检查U, V, W任意两相之间阻值相差不超过为一Q。
测量U, V, W是否对地短路,U, V, W任意一相对地之间是0 Q,如果测量出来有电阻则电机对地短路。
第二:响应过快,出现瞬时过冲现象,导致电流超过驱动器允许最大电流,请查看故障时电流F922,调整斜率试一下。
必要时可适当降低转速。
第三:电机退磁或咬死或泵与电机之间卡死,导致电流过大。
测试系统压力175 bar,正常情况下电流为30A左右,退磁后可能60-80A.退磁后电流特别大,电机温度特别高。
第五:测量驱动器IGBT是否损坏,将万用表打为二极管档,红表笔对驱动器下方直流母线电压“-”黑表笔对U,V,W测量是否有压降,然后黑表笔对直流母线电压“+”,红表笔对U,V,W测量否有压降,当然会有误差,但是任意两相之间的压降基本相等,否则可以判断IGBT损坏。
第六:检查驱动器内部霍尔元件是否损坏或线未接好。
第七:驱动器模块损坏,请检查驱动器模块。
第八:负载过大,请加大驱动器容量Err05 Err06 Err07 过电压第一:检查输入电压是否过高。
第二:检查减速过程中是否有外力拖动电机。
第三:监视U002电压看有没有超出840V,正常情况下直流电压为380 X =513V. 第四:检查制动电阻制动单元有无损坏。
r a训忙『■■ 'ClOf ■■ -.liil: JIAlmfY rawluQmUloniryR1 -愛*SlfftdEI ISI S3制动单元制动电阻测试方法:测量电阻方法:先将机器断电处理,将万用表打为电阻档,如果两个24 Q并在一起,电阻是12Q,安装一个制动电阻就是24 Q。
分别用红表笔和黑表笔对制动单元上的PB和P测量是否有相对应的电阻,如果没有请检查电阻线或更换制动电阻。
测量制动单元方法:先将机器断电处理,将万用表打为二极管档,黑表笔对制动单元上PB,红表笔对制动单元上“负”看有没有压降,没有的话更换制动单元。
再将万用表打为直流电压测量,先将机器上电,打开油泵电机,红表笔对PB,黑表笔对“负”,看有没有540V直流电压,没有的话更换制动单元。
再看一下在机器报过电压时制动单元上的红灯有没有亮。
Err10 电机过载第一:确定报ERR10时电流是否超过了驱动器的过载保护值。
第二:在零速运行电流是否达到转矩上限,是则旋信号问题。
第三:检查电机参数是否正确。
第四:重新自学习再试。
第五:检测霍尔元件有无损坏,线有无松动。
第六:检测负载是否过大。
Err12 输入缺相第一:检测输入相是否缺相。
第二:检测整流桥是否损坏,将万用表打为二极管档,红表笔对驱动器下方“- ”黑表笔对R,S,T 测量是否有压降,然后黑表笔对“ +”,红表笔对R,S,T 测量否有压降,当然会有误差,但是任意两相之间的压降基本相等,否则可以判断整流桥损坏。
第三:将A300=0非油压模式,做电机动态调谐F116=2,看能否通过,能通过驱动板有问题,不能通过防雷板有问题。
Err13 输出缺相第一:对电机进行测试, 包括相与相, 相与地之间的阻值是否正常,同以上测量方法。
电机线有没有松动断线等现象。
第二:IGBT 有没有损坏,同以上测量方法。
第三:霍尔元件有没有损坏,线有没有接好。
第四:对检测电流及有关排插进行检测。
Err14 模块过热第一:检测驱动器温度是否超过60 度。
第二:检测驱动器风扇有无转动。
第三:检测驱动器内部热敏电阻有无损坏,监视驱动器温度F7O7温度值。
Err42 通讯故障(注一个驱动器不会报警通讯故障)第一:查看U007,DI5 灯有无亮灯。
第二:查看通讯线有无松动,分别是730,731,732 。
万用表检测DI5 端子有无24v 电压。
第三:查看通讯地址A20仁副N+1Err43 编码器故障(注编码器故障只在调谐过程中出现)第一:检查编码器型号是否匹配,电机参数是否正确。
第二:注:电机最高转速不能低于额定转速。
第三:检测编码器连线是否有错误。
分3组:REH、RE1为一组;SIN +、SIN —为一组;COSH CO—为一组,每一组的正负之间为有阻值的线圈,可通过测量每组线圈间的阻值来判断编码器线、插头或编码器自身线圈是否有故障。
经验值(多摩川):REF +、REF—间线圈阻值为36Q左右;SIN+、SIN —间线圈阻值等于CO H、CO—间线圈阻值为42Q左右。
不同组的两信号间阻值为“无穷大”,例如REF H与CO—间阻值为“无穷大”。
第四:做动态调谐,A300=0 (非油压模式)F116=2,观察编码器角度U1oo.看在调谐过程中有没有出现报警,如报Err43 ,请更换编码器,连续调谐三次如不报警,请更换PG 卡。
ERR4 4速度偏差过大第一:检查电机参数是否正确,电机动转过程中是否受到阻力。
第二:检测编码器连线是否有错误。
(注:其实还是编码器故障,只不过编码器故障只在调谐过程中报编码器故障,生产中就报速度偏差过大。
)第三:按检测编码器步骤检测。
Err45 电机温度过热第一:检查是否接上电机热敏电阻线。
或者热敏电阻是否正常。
正常阻值大概在200~300欧左右。
第二,电机实际太热,温度已达到过热保护水平130度。
请做好电机降温措施,或者加大电机。
Err46 油压传感器故障第一:检测油压传感器连线是否错误,供电是否正常。
第二:监视U106传感器反馈电压是否正常,系统压力175bar时有7V左右电压。
驱动器上电无显示:第一:输入电源有没有电过来。
第二:检查整流元件有无损坏。
第三:检测驱动器下方“ +”“ - ”有无513V直流电压。
第四:检测驱动板电源有没有。
自学习过程中可能出现的异常现象1:ERR20艮警停机,ERR43报警,ERR10艮警原因:编码器环节存在问题,或反相,或断线,或焊接线错误处理:尝试用参数A1-03将编码器极性取反或者改变UVW相序。
如果不能解决,则应当检查编码器的接线,或者检查编码器的安装工艺现象2:面板出现“ TUNE,但一直不会消失,仿佛死机一般。
原因:编码器环节存在问题,通常是断线,或整个插头接触不良,或PG卡不良处理:检查编码器接线,或尝试更换PG卡注意:自学习不能通过,绝对不允许运行伺服系统!!!。