ABB电动执行器ONTRAC操作说明
- 格式:pdf
- 大小:717.41 KB
- 文档页数:12
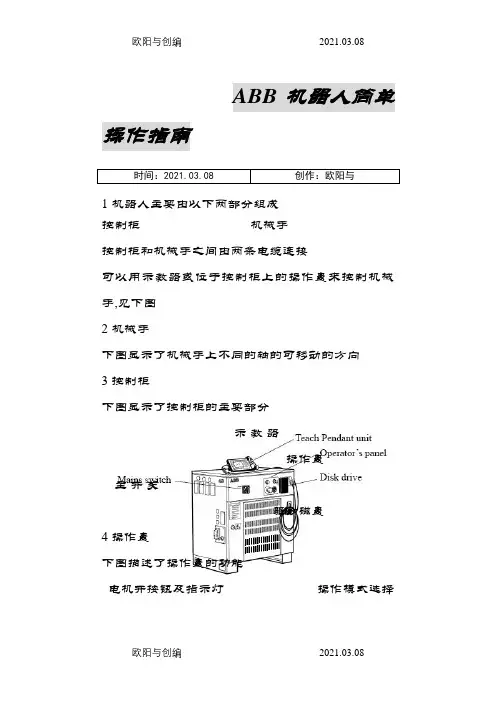
ABB机器人简单操作指南时间:2021.03.08 创作:欧阳与1 机器人主要由以下两部分组成控制柜机械手控制柜和机械手之间由两条电缆连接可以用示教器或位于控制柜上的操作盘来控制机械手,见下图2 机械手下图显示了机械手上不同的轴的可移动的方向3 控制柜下图显示了控制柜的主要部分示教器操作盘主开关驱动磁盘4 操作盘下图描述了操作盘的功能电机开按钮及指示灯操作模式选择开关急停,如果按下请拉出来工作时间计数器,显示机械手的工作时间电机开在电机开状态,机器人的电机被激活,Motors On按钮保持常亮.常亮准备执行程序快速闪烁(4Hz) 机器人没有校准或选择计数器没有更新.电机已经打开.慢速闪烁(1Hz)一个保护停机被激活,电机关闭.工作模式自动 (生产模式)在这个模式下,当运行准备就绪后,不能用控制杆手动移动机器人工作模式手动减速运行 (程序模式)在机器人工作区域里面对其编程时候.也用于在电机关状态设置机器人.工作模式手动全速 (选择,测试模式)用来在全速情况下运行程序急停当按下按钮时,无论机器人处于什么状态都立即停止.要重新启动需将按钮恢复工作时间计数器显示机械手工作的时间5 示教器见下图控制运行使能设备显示屏控制杆急停按钮手动慢速运行:打开手动慢速运行窗口编程: 打开编程及测试窗口输入/输出:打开输入输出窗口,用来手动操作输入输出信号其它:打开其它窗口如系统参数,维护,生产及文件管理窗口.停止: 停止程序执行对比度: 调节显示屏的对比度菜单键: 按下后显示包含各种命令的菜单功能键: 按下后直接选择各种命令动作单元: 按下后手动慢速运行机器人或其它机械元件动作形式: 按下后选择怎样手动慢速运行机器人,再定位或直线动作形式: 轴-轴移动. 1=轴1-3, 2=轴4-6增加: 增加手动慢速运行开/关列表: 按下后将指针从一个窗口移到另一个窗口(通常由双画线分开)返回/翻页: 按下翻页或返回上级菜单删除: 删除选中的参数确认: 按下输入数据上下键: 上下移动指针左右键: 左右移动指针编程键: 怎样定义这些键,见第10章,系统参数-示教器5.2 窗口操作本节讲述如何进行窗口操作,下面举例说明如何操作输入/输出窗口按下打开输入/输出窗口I/O窗口将被打开,如下图所示.显示的I/O清单将会随定义的信号及I/O板的不一样而不同A: 菜单键B: 窗口名称C: I/O列表名D: I/O列表E: 功能键F: 行数G: 指针当数字输出被选中后,可通过功能键改变其状态,可以通过几种方法在列表中移动指针移动选择上移一行上移箭头下移一行下移箭头至顶行从编辑菜单至第一行至末行从编辑菜单到最后一行翻页下页上页至上页在列表中选定一个指定的行从编辑Edit菜单跳到指定行:键入行号然后按OK窗口有时候被一条双划线分开,当一个输出被选中后,将出现两个功能键A-双划线 B-功能键有时可以在不同的窗口之间移动指针,而要在不同窗口之间移动,需按在示教器上有四个窗口键,见下图A-窗口键当按下窗口键后,以前的窗口将隐藏在新激活的窗口下面,被激活的窗口状态和上一次使用该窗口时一样。
ABB电动执行器ONTRAC操作说明一、功能特点1.高精度控制:ONTRAC采用了先进的闭环反馈技术,能够实现精确的位置控制,提供高度准确的输出。
2.多功能配置:ONTRAC提供多种配置选项,包括行程长度、速度控制、输出力矩等,满足不同控制要求。
3.可编程性:ONTRAC允许用户通过现场编程,自定义执行器的工作方式和逻辑,适应各种复杂的控制需求。
4.耐用可靠:ONTRAC采用了高品质的材料和先进的制造工艺,具有较长的使用寿命和良好的抗干扰能力。
5. 多种通讯协议:ONTRAC支持多种标准通讯协议,包括Modbus、Profibus、Foundation Fieldbus等,方便与其他系统的集成。
二、安装流程1.确保电源和控制信号的稳定连接。
2.将ONTRAC固定在需要控制的阀门上,确保紧固螺母牢固。
3.连接ONTRAC与阀门的机械传动装置,确保传动装置与ONTRAC的输入轴对齐。
4.连接ONTRAC与控制系统的通讯线路,确保通讯的正常运行。
5.完成所有的电气连接后,进行系统的功率校准和通讯参数的配置。
三、操作方法1.常规操作:ONTRAC可通过外部控制信号来控制执行器的开关、调节和停止等操作。
2.控制方式切换:通过设置ONTRAC的工作模式和参数,可以实现手动、自动和远程等多种控制方式的切换。
在手动模式下,可通过外部开关或旋钮来控制执行器的运动;在自动模式下,可通过设定的调节算法和控制策略来实现自动调节;在远程模式下,可通过通讯接口来进行遥控操作。
3.位置校准:在初始安装或更换执行器后,用户可以通过设置ONTRAC的位置参数,进行位置的校准。
4.报警和故障排除:ONTRAC配备了多种报警和故障检测功能,如位置异常、通讯故障等。
通过相关的报警灯或显示屏,用户可以及时了解执行器的工作状态,进行故障排查和维修。
四、维护保养1.定期检查:用户应定期检查ONTRAC的电气连接、物理连接和机械传动装置的状态,确保其正常运行。
![ABB机器人操作手册(中文版)[7]](https://uimg.taocdn.com/58b9311d0622192e453610661ed9ad51f01d54b9.webp)
ABB机器人操作手册(中文版)ABB操作手册(中文版)一、概述ABB是一种先进的工业,可以在各种领域和场合进行自动化作业,提高生产效率和质量。
ABB的主要特点有:高度灵活性:ABB可以根据不同的任务和环境,进行快速和精确的移动和操作。
易于编程:ABB可以通过图形化界面或代码方式进行编程,支持多种编程语言和标准。
安全可靠:ABB具有多重安全保护功能,可以在异常情况下自动停止或报警,避免对人员和设备造成伤害。
智能互联:ABB可以与其他设备和系统进行通信和协作,实现智能化的生产管理和控制。
二、安装准备工作:检查的包装和附件是否完整,选择合适的安装位置和方向,确保安装地面平整、坚固、干净,并留有足够的空间。
固定:将底座与安装地面用螺栓紧固,并用水平仪检查是否水平。
如果需要,可以使用垫片调整的高度。
连接控制柜:将的信号线与控制柜连接,并将控制柜与电源插座连接。
注意信号线的编号和标识,避免接错或接反。
同时,检查控制柜的开关和指示灯是否正常。
连接操作盘:将操作盘与控制柜连接,并打开操作盘的电源开关。
注意操作盘的按钮和显示屏是否正常。
连接工具:根据需要,将工具与末端执行器连接,并将工具的电源线或气源线与相应的接口连接。
注意工具的型号和参数是否匹配,避免造成损坏或故障。
三、启动打开电源箱的总开关,并检查电源箱上的指示灯是否正常。
打开控制柜的总开关,并检查控制柜上的指示灯是否正常。
打开操作盘上的急停按钮,并检查操作盘上的指示灯是否正常。
按下操作盘上的启动按钮,并等待系统自检完成。
按下操作盘上的复位按钮,并清除系统中可能存在的报警信息。
按下操作盘上的使能按钮,并选择合适的模式(手动模式或自动模式)。
四、编程ABB可以通过两种方式进行编程:图形化界面或代码方式。
图形化界面是一种简单易用的编程方式,可以通过操作盘上的按钮和显示屏,进行的运动控制和程序编辑。
代码方式是一种高级的编程方式,可以通过编写特定的代码,实现的复杂功能和逻辑控制。

智能MME800系列调节型 S4-25%/1200次/小时 多转式电动执行器 扭矩30~125 N ·m 操作说明 速度7~35 r/min(用于1.06版本软件的执行器) 10/78—1.05 CN■ 应用本电动执行器结构坚固耐用,适用于操纵端控制元件,广泛应用于能源、化工、石油与天然气、水与污水处理等行业。
附加的齿轮传动装置(用于有限转角、直线运动)能与各种类型的阀门相互匹配使用。
智能型多转式执行器具有多种扩展功能,如自诊断功能,大大地简化了调试工作并可加快工程进度。
MME800系列执行器可以通过使用方便的红外通讯接口或任选的总线接口进行通讯。
模块式结构,规格精简,降低用户备品备件库存量辅助的速度控制能确保在微偏差调节中获得很高的定位精度目录1.适用范围。
2 2.菜单结构和参数设定。
2 3.电气连接。
6 4.红外通讯。
9 5.故障与意外情况处理。
10 6.现场总线。
11 7.附言。
121. 适用范围本操作说明适用范围为软件版本1.06的ONTRAC MME800全系列产品,也可供MOE700全系列产品使用参考。
2. 菜单结构和参数设定ONTRAC产品采用多层树状菜单,操作简单,维护方便。
第一级菜单中除“P0”外,均含有第二级子菜单。
图1工作状态接通三相电后,拨动拨盘可切换“REMOTE”、“O/S”和“LOCAL”工作状态。
执行器处于“REMOTE”状态时,接受远程控制或者现场总线信号进行动作,此时本地操作可观察各状态运行参数,但无法修改参数,也无法通过本地操作驱动执行器。
执行器处于“O/S”状态时,不接受任何驱动信号,但可通过本地操作观察各运行参数,此为出厂预设状态。
执行器处于“LOCAL”状态时,可进行本地操作驱动执行器,并可进行产品运行参数修改。
图2在初始状态(显示“LOCAL”、“REMOTE”或者“O/S”)时,长按“MODE”按钮即可进入第一级菜单。
在显示第一级菜单时短按“MODE”按钮即可退出菜单。
(完整)ABB机器人基本操作说明书书(3)编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望((完整)ABB机器人基本操作说明书书(3))的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为(完整)ABB机器人基本操作说明书书(3)的全部内容。
ABB机器人基本操作说明书一.认识机器人的示教器和电气柜基本按钮作用图1——机器人示教器电气柜的总电源开关,图示状态为开启,逆时针转就是关闭。
每次断电长时间不是急停按钮当出现紧急状况时可按下此按钮机器人就会立刻停止,当需要恢复按钮时只需上电按钮及上电指示灯,当将机器人切换到自动状态时,在示教器上点击确定后还需要按下这个按钮机器人才会进入自动运行状态机器人运行状态切换旋钮,左边的为自动运行,中间的为手动限速运行,右侧为手动全速运行(此状态在不允许操作人员选用)。
图2——机器人电器柜图3--示教器上的使能按钮这个示教器侧面的使能按钮是在手动示教时需要机器人动作时要一直按住的。
它有三个档分别对应:不握住、适当力度握住、大力握住。
其中只有在适当力度握住时才会起作用,此时电器柜上的上电指示灯会常亮,否则会是闪烁状态。
图4-—示教器的正确握法示教器界面上操作人员需要用到的几个按钮图5—-示教器按钮界面右下角指示的含义线性增量开 1—3轴增量开 4-6轴增量开紧急停止按钮,同图示教器旋钮切换到线性或重定位状态(回原点必须用切换到单轴运动时在1-3轴和4-6轴间增量开关按钮手动操作时一定要打开增手动运行程序时这些按钮分别为上一重定位增量开增量开增量关图6——示教器右下角图示如何选择工具坐标工件坐标 1、打开手动操作界面如下2、点击坐标系3、选择要用的坐标点击确认如何调整增量大小和手动状态下的机器人速度1、点击下图箭头标记处2、点击箭头处设置增量大小3、点击箭头处进行手动运行速度设置如何进入想要调试的程序1、打开程序编辑器2、点击调试选择pp移至例行程序3、选择需要进入的程序然后确认机器人意外停止后如何回原点1、机器人打到手动状态。


电动执行机构的PROFIBUS DP 总线接口使用说明书执行机构软件版本:>2.00 42-78-102 中文目录设备识别名牌...........................................2 总线通讯...................................................2 设定..........................................................3 设备数据文件(GSD) ................................ ....4 通讯模块描述.............................................4 现场总线参数设置....................................9 附录(GSD 文件). (12)1. 设备识别铭牌1.1 数据标贴第 1 行: 执行机构型号 第 2 行: 序列号 / 生产年份 第 3 行: 最大输出速度 / 最大关断扭矩 第 4 行: 环境温度 / 防护等级 第 5 行: 润滑油型号 第 6 行: 额定电压范围 / 电源频率 第 7 行: 输入功率 /工作模式 第 8 行: 外用保险丝 第 9 行: 软件版本 第 10 行: 关断力矩 (厂家设定) 第 11 行: 开向/关向工作力矩 (厂家设定) 第 12 行: 开向/关向工作速度 (厂家设定)附加标签提示默认总线地址。
当地址改变,请替换标签。
1.2 附加蜗轮传动机构的识别铭牌制造商 型号 输入力矩 Nm 速度传输比 输出力矩Nm蜗轮传动机构编号第 1 行: 蜗轮传动机构制造商 第 2 行: 蜗轮传动机构型号 第 3 行: 输入力矩第 4 行: 蜗轮传动机构速度传输比 第 5 行: 输出力矩2.总线通讯ONTRAC MOE 电动执行机构作为从站设备,可以通过Profibus DP 与主站进行周期性的数据交换,并且可以使用图形化用户界面来进行参数设置与组态。
ABB机器人实际应用中的指令说明RAPID 程序指台与功能ABB 机器人提供了丰富的RAPID 程序指令,方便了大家对程序的编制,同时也为复杂应用的实现提供了可能。
以下就按照 RAPID 程序指令、功能的用途进行了一个分类,并对每个指令的功能作一个说明,如需对指令的使用与参数进行详细的了解,可以查看 ABB 机器人随机光盘说明书中的详细说明。
一、程序执行的控制1、程序的调用指令说明ProcCall 调用例行程序CallByVar 通过带变量的例行程序名称调用例行程序RETURN 返回原例行程序2、例行程序内的逻辑控制Compact IF 如果条件满足,就执行一条指令IF 当满足不同的条件时,执行对应的程序FOR 根据指定的次数,重复执行对应的程序WHILE 如果条件满足,重复执行对应的程序TEST 对一个变量进行判断,从而执行不同的程序GOTO 跳转到例行程序内标签的位置Label 跳转标签3、停止程序执行Stop 停止程序执行EXIT 停止程序执行并禁止在停止处再开始Break 临时停止程序的执行,用于手动调试ExitCycle 中止当前程序的运行并将程序指针PP复位到主程序的第一条指令,如果选择了程序连续运行模式,程序将从主程序的第一句重新执行。
二、变量指令变量指令主要用于以下的方面:l) 对数据进行赋值。
2) 等待指令。
3) 注释指令。
4) 程序模块控制指令1、赋值指令:= 对程序数据进行赋值2、等待指令WaitTime 等待一个指定的时间程序再往下执行WaitUntil 等待一个条件满足后程序继续往下执行WaitDI 等待一个输入信号状态为设定值WaitDO 等待一个输出信号状态为设定值3、程序注释comment 对程序进行注释4、程序模块加载Load 从机器人硬盘加载一个程序模块到运行内存UnLoad 从运行内存中卸载一个程序模块Start Load 在程序执行的过程中,加载一个程序模块到运行内存中Wait Load 当 Start Load 使用后,使用此指令将程序模块连接到任务中使用CancelLoad 取消加载程序模块CheckProgRef 检查程序引用Save 保存程序模块EraseModule 从运行内存删除程序模块5、变量功能TryInt 判断数据是否是有效的整数OpMode 读取当前机器人的操作模式RunMode 读取当前机器人程序的运行模式NonMotionMode 读取程序任务当前是否无运动的执行模式Dim 获取一个数组的维数Present 读取带参数例行程序的可选参数值IsPers 判断一个参数是不是可变量IsVar 判断一个参数是不是变量6、转换功能StrToByte 将字符串转换为指定格式的字节数据ByteT ostr 将字节数据转换成字符串三、运动设定1、速度设定MaxRobspeed 获取当前型号机器人可实现的最大TCP 速度VelSet 设定最大的速度与倍率SpeedRefresh 更新当前运动的速度倍率Accset 定义机器人的加速度WorldAccLim 设定大地坐标中工具与载荷的加速度PathAccLim 设定运动路径中 TCP 的加速度2、轴配置管理ConfJ 关节运动的轴配置控制ConfL 线性运动的轴配置控制3、奇异点的管理SingArea 设定机器人运动时,在奇异点的插补方式4、位置偏置功能PDispOn 激活位置偏置PDispSet 激活指定数值的位置偏置PDispOff 关闭位置偏置EOffsOn 激活外轴偏置EOffsSet 激活指定数值的外轴偏置EOffsOff 关闭外轴位置偏置DefDFrame 通过三个位置数据计算出位置的偏置DefFrame 通过六个位置数据计算出位置的偏置ORobT 从一个位置数据删除位置偏置DefAccFrame 从原始位代和替换位代定义一个框架5、软伺服功能SoftAct 激活一个或多个轴的软伺服功能关闭软伺服功能SoftDeact 关闭软伺服功能6、机器人参数调整功能TuneServo 伺服调整TuneReset 伺服调整复位PathResol 几何路径精度调整CirPathMode 在圆弧插补运动时,工具姿态的变换方式7、空间监控管理WZBoxDef 定义一个方形的监控空间WZCylDef 定义一个圆柱形的监控空间WZSphDef 定义一个球形的监控空间WZHomejointDef 定义一个关节轴坐标的监控空间WZLimjointDef 定义一个限定为不可进入的关节轴坐标监控空间WZLimsup 激活一个监控空间并限定为不可进入WZDOSet 激活一个监控空间并与一个输出信号关联WZEnable 激活一个临时的监控空间WZFree 关闭一个临时的监控空间注:这些功能需要选项“world zones”配合。

ABB的手动操作
本文档提供了ABB的手动操作的详细步骤和指导。
以下章节将逐步介绍手动操作的各个方面。
1.准备工作
1.1 确保电源已连接并打开。
1.2 在控制台或者操控设备上打开ABB的操作界面。
2.手动操作模式的选择
2.1 在ABB的操作界面上,选择手动操作模式。
2.2 确保处于安全状态,且没有正在执行的自动化任务。
3.姿势控制
3.1 使用手柄或者其他操控设备控制的各个关节,实现姿势的调整。
3.2 通过手动控制的运动,确保的位置符合预期。
4.末端执行器控制
4.1 使用操控设备或者控制面板上的按钮,控制末端执行器的开启和关闭。
4.2 确保末端执行器的控制操作正确无误。
5.应急停止和重置
5.1 在紧急情况下,按下操作面板上的应急停止按钮,立即停止的运动。
5.2 在处理完紧急情况后,按下上的重置按钮或者重新启动系统,恢复的工作状态。
6.安全注意事项
6.1 在操作时,确保操作人员戴好安全手套和其他个人防护装备。
6.2 避免将人体部位置于运动范围内,以防止意外伤害。
6.3 严禁在运行时对其进行维护或者更改。
附件:
1.ABB用户手册:提供了ABB的详细操作说明和相关安全指导。
2.ABB安全手册:介绍了的安全操作规程和标准。
法律名词及注释:
1.:依据《安全》国家标准GB/T12668-2011的定义,是自动执行给定任务的可重编程的多功能机械设备。
2.手动操作:依据《安全》国家标准GB/T12668-2011的定义,手动操作指通过操作设备或者控制面板手动控制运动或开关操作。
9.6Error messagesAny errors that occur are shown in coded form by an error number in the LED display onthe front panel.All error messages result in the BTB/RTO contact being opened,the out-put stage being switched off(motor loses all torque),and the holding brake is activated.Number Designation ExplanationA/I/P/E Status Messages Status messages,no error,see p.89...Status Message Updating the startup configurationF00no error no error on the selected axis moduleF01*Heat sink temperature Heat sink temperature too high limit is set by manufacturer to80°F02*Overvoltage Overvoltage in DC bus linklimit depends on the electrical supply voltageF03*Following error Message from the position controllerF04Feedback Cable break,short-circuit,short to groundF05*Undervoltage Undervoltage in DC bus linklimit is set by manufacturer to100VF06Motor temperature Motor temperature too high or temp.sensor defect limit is set by manufacturer to145°CF07Internal voltagesupplyInternal amplifier supply voltages are out of toleranceF08*Overspeed Motor runs away,speed is too highF09EEPROM Checksum errorF10Flash-EPROM Checksum errorF11Brake Cable break,short-circuit,short to groundF12Motor phase Motor phase missing(cable break or similar)F13*Internal temperature Internal temperature too highF14Output stage Fault in the power output stageF15I²t max.I²t maximum value exceededF16*Supply BTB/RTO2or3phases missing in the mains supply feedF17A/D converter Error in the analog-digital conversion,normally caused by extreme electromagnetic interferences.F18Regen Regen circuit faulty or incorrect settingF19*Supply phase A phase is missing in the mains supply power feed F20Slot fault Slot error(hardware fault on interface card)F21Handling error Software error on the interface cardF22reserved reservedF23CAN-bus off Severe CAN bus communication errorF24Warning Warning is displayed as faultF25Commutation error Commutation errorF26Limit switch Homing error(hardware limit switch activated)F27reserved reservedF28External Trajectory External position profile generator created a step,that exceeded the maximum valueF29Sercos Error only in SERCOS systemsF30Emergency timeout Timeout emergency stopF31Macro Macro program errorF32System Error system software not responding correctly*=these error messages can be cleared without a reset,by using the ASCII commandCLRFAULT.If only one of these errors is present and the RESET button or the I/ORESET function is used,only the CLRFAULT command will be executed.More information to the messages can be found in the ASCII Object Reference(Online Help),see parameter ERRCODE.Hints for removal can be found in theOnline help chapter"Trouble-Shooting".90AX2500Product Manual Setup06/2007BECKHOFF9.7Warning messagesFaults which occur,but which do not cause a switch-off of the amplifier output stage(BTB/RTO contact remains closed),are indicated in the LED display on the front panel bya coded warning number.Number Designation ExplanationA/I/P/E Status Messages Status messages,no error,see p.89...Status Message Updating the startup configurationn01I²t I²t threshold exceededn02Regen power Reached preset regen power limitn03*S_fault Exceeded preset following error limitn04*Response monitoring Response monitoring(fieldbus)has been activatedn05Supply phase Mains supply phase missingn06*SW limit switch1Underrun software limit switch1n07*SW limit switch2Overrun software limit switch2n08Motion task error A faulty motion task was startedn09No reference point No reference point(Home)set at start of motion taskn10*PSTOP PSTOP limit-switch activatedn11*NSTOP NSTOP limit-switch activatedn12Motor default valuesloadedOnly for ENDAT or HIPERFACE®:discrepancy between motor number saved in the en-coder and the amplifier,motor default values loadedn13*reserved reservedn14SinCos feedback SinCos commutation(wake&shake)not completed, will be canceled when amplifier is enabled and wake &shake carried outn15Table error Fault according to speed/current table INXMODE35 n16Summarized warning Summarized warning for n17to n31n17Fielbus Synchronization The mode synchronization SYNCSRC is selected but the drive isn’t in synchronies cyclen18Multiturn overrun Using Multiturn encoder feedback,an overrun over the maximum number of resolutions was detectedn19Motion task ramps arelimitedRange overflow on motion task datan20Wrong GMT data Wrong"Graphical Motion Task"data n21PLC program error For details see plc coden22max.motor temperaturreachedThe user can shut down the process before the tem-perature eror will interrupt the process immediatelyn23...n31reserved reservedn32firmware beta version Firmware is an unreleased beta version*=these warning messages result in a controller shut-down of the drive(braking byemergency stop ramp)More information to the messages can be found in the ASCII Object Reference(Online Help),see parameter STATCODE.Hints for removal can be found in theOnline help chapter"Trouble-Shooting".AX2500Product Manual91 BECKHOFF06/2007Setup。
ABB电动执行器使用说明书用于过程自动化的智能型电动执行机构仪器仪表—解决方案1 DS_Ontrac_ZH Rev.B 产品简介历史悠久、拥有执行机构行业世界领先地位的Hartmann&Braun 早在40年前,就开始向中国提供高效的电动执行机构产品,并于八十年代向中国的一家企业转让了RHA 、RS 型生产技术。
1999年Hartmann&Braun 随 Elsag Bailey 过程自动化集团正式并入ABB 集团。
ABB 在淘汰了RHA 、RS 型技术后,于2000年推出了Ontrac 智能电动执行机构。
自诞生之日起,Ontrac 就几乎成为先进性和高可靠性的代名词,至今已在世界各地多个工业领域得到广泛的应用。
Ontrac 是实时多任务嵌入式系统与成熟的ABB 变频驱动技术的完美结合体,由于采用了先进的电子技术,Ontrac 的机械部分已经被简化至极致,这无疑是现代机电产品的一个重要的发展方向。
实践证明,Ontrac 产品可以适应各种复杂的甚至十分恶劣的使用环境。
灵活的功能,稳定的性能以及超长的使用寿命都使选用Ontrac产品成为一种很好的投资方案。
功能时间随着数字信息技术的迅猛发展,控制系统对执行机构的功能要求也越来越高,Ontrac 正是顺应这种趋势,做到了既能与当今最先进的控制系统匹配,又能满足所有传统控制系统的要求。
可以说,选用Ontrac 产品,您在技术上也就争得了先机。
主要特性描述:● 采用先进的ABB 变频驱动技术,实现了柔性启动和停机,彻底摆脱"水锤效应"● 速度和力矩双向独立可调,超大的调整范围大幅降低了用户的选型难度和备品成本●灵活的控制方式选择,即能实现总线控制又能满足开关量模拟量控制,并能够适应各种复杂的有特殊要求的改造项目● 电气部分充分的抗干扰和防冲击设计,使产品运行极为稳定,并有效杜绝了"电网污染"问题● 超高的定位精度,即使在全行程(多回转)1圈的情况下,也能够达到1%的定位精度● 广泛的监视与自诊断功能,帮助用户迅速准确地判断执行机构甚至阀门的运行状态● 完善的安全防护功能,可有效杜绝现场误操作或在系统紧急故障时将危害降低至最小● 简洁高效的人机交互界面和非侵入式设计,使现场安装调试变得异常简单● 可靠的电路设计和简单的机械结构造就了超长的使用寿命技术参数供电电源:三相三线制:220/380/460/55V±10%,50/60Hz±5%单相两线制:110/220V±10%,50/60Hz±5%工作模式:1)开关型MOE产品:连续运行,S2-15min2)调节型MME产品:继续运行,S4-25%,接通次数≤1200/小时电机控制:变频控制内部电源:24V.DC,最大40mA,具短路保护功能外部电源:24V.DC(18~33V),最大500mA输入信号:1)模拟量:4~20mA.DC,输入阻抗250Ω,上升特性2)开关量:脉宽≥50ms,数字0为-3~+5V或开路,数字1为+12~+35V3) Pro?bus-DP输出信号:1)模拟量:4~20mA.DC 负载阻抗≤750Ω,温度影响≤0.1%/10K,上升特性(默认)2)开关量:4副基本无源触点,可增选至7或8副(所有输出触点均可组态),触点容量30V.DC,1A或125V.AC,0.5A,4副基本无源触点也可选250V.AC.8A规格3)Pro?bus-DP或MODBUS行程范围:多转式产品最小圈数为1圈,最大圈数不限设定力矩:40%~100%可调,步距5%设定转速:40%~100%可调,步距5%基本误差:1)多转式电动执行机构(行程≥1圈)≤±0.5% 2)角行程电动执行机构3)直行程电动执行机构(行程≥25mm)≤±0.5%控制死区:0.5%(0.5~10%可调)中途限位:1)开限位设置范围为55%~100%2)关限位设置范围为0%~45%防护等级:IP67(IP68可选)防爆等级:ExdⅡBT4可选环境条件:1)环境温度:开关型MOE为-25℃~+70℃调节型MME为-25℃~+60℃分体式传动部分为-40℃~+85℃2)相对湿度:≤95%3)空气介质:周围空气中无强腐蚀性、易燃、易爆气体除湿加热器:产品内部有专门的发热元器件,一般情况下不需要特殊提供CE电气法规:1) EN 61000-6-4: 2007, EN 61000-6-2: 20052) EN 61000-3-2:2006 +A1: 2009+A2: 2009,EN 61000-3-3: 20083) EN 60204-1:2006+A1:2009安装方向:任意方向抗震能力:5~200Hz内0.75g正弦波或5~150Hz内2g正弦波(分体式:加速度3g:X-28.97Hz,Y-96.68Hz,Z-149.6Hz)注:如果您有其他技术要求,请与我们联系,我们将尽力满足您的需求。
智能MME800系列调节型 S4-25%/1200次/小时 多转式电动执行器 扭矩30~125 N ·m 操作说明 速度7~35 r/min(用于1.06版本软件的执行器) 10/78—1.05 CN■ 应用本电动执行器结构坚固耐用,适用于操纵端控制元件,广泛应用于能源、化工、石油与天然气、水与污水处理等行业。
附加的齿轮传动装置(用于有限转角、直线运动)能与各种类型的阀门相互匹配使用。
智能型多转式执行器具有多种扩展功能,如自诊断功能,大大地简化了调试工作并可加快工程进度。
MME800系列执行器可以通过使用方便的红外通讯接口或任选的总线接口进行通讯。
模块式结构,规格精简,降低用户备品备件库存量辅助的速度控制能确保在微偏差调节中获得很高的定位精度目录1.适用范围。
2 2.菜单结构和参数设定。
2 3.电气连接。
6 4.红外通讯。
9 5.故障与意外情况处理。
10 6.现场总线。
11 7.附言。
121. 适用范围本操作说明适用范围为软件版本1.06的ONTRAC MME800全系列产品,也可供MOE700全系列产品使用参考。
2. 菜单结构和参数设定ONTRAC产品采用多层树状菜单,操作简单,维护方便。
第一级菜单中除“P0”外,均含有第二级子菜单。
图1工作状态接通三相电后,拨动拨盘可切换“REMOTE”、“O/S”和“LOCAL”工作状态。
执行器处于“REMOTE”状态时,接受远程控制或者现场总线信号进行动作,此时本地操作可观察各状态运行参数,但无法修改参数,也无法通过本地操作驱动执行器。
执行器处于“O/S”状态时,不接受任何驱动信号,但可通过本地操作观察各运行参数,此为出厂预设状态。
执行器处于“LOCAL”状态时,可进行本地操作驱动执行器,并可进行产品运行参数修改。
图2在初始状态(显示“LOCAL”、“REMOTE”或者“O/S”)时,长按“MODE”按钮即可进入第一级菜单。
在显示第一级菜单时短按“MODE”按钮即可退出菜单。
ABB 电动执行机构【产品名称】ONTRAC MME800系列智能调节型电动执行器【产品简介】ABB公司生产的ontrac智能型电动执行器,居于国际领先地位,以可靠性高、定位精确著称,其ontrac MME800系列调节型电动执行器,定位速度小于5S,输出力矩大,适应能力强,具有良好的机械、电机调节特性,先进的微处理技术及通讯接口与PC或DCS连接,采用通用的Hart 或Profibus通讯协议,接受模拟量或开关量信号控制,用户通过控制面板即可进行参数调整、功能设置、执行器动作设定、远程监控等组态势,以适应阀门的最佳控制特性.【主要特点】 1. 利用检测电机转差率,作为输出负载的监控参数,代替传统的蝶形弹簧组件或其它压力传感器件,取消机械力矩调整装置及力矩开关,通过微处理器,使力矩保护值的大小根据现场工况的要求随意可调.2. 采用霍尔传感器进行行程位置的电磁脉冲计数,取消传统的齿轮计数装置、电位器及限位开关,具有无接触无磨损,分辨率高寿命长、抗干扰能力强等特点,同时测量位移、速度、转向等参数,通过微处理器处理,可进行任意确定工作区间、改变一定转速等设定。
3. 采用变频控制技术,可方便的控制转速输出,达到控制要求,输出力矩不受频率、电压改变的影响。
4. 输出转速、过力矩保护双向独立可调,可使开阀、关阀速度不一致,以及变速定位,可使阀门寿命大大提高。
5. 手动优先,无论电动状态或静止,手轮都能可靠的合至手动位置进行手动操作。
【基本功能】 1. 恒转矩变频调速。
2. 能进行电子式速度和转矩设定。
3. 通过数字通讯或现场控制盘进行组态。
4. 采用高技术传感,调试极其简单。
5. 广泛的监视与自诊断功能。
【技术指标】 1. 电源三相380V AC -15%~+10% 50/60HZ +/-5%2. 输出电压DC24V 最大30mA对DI/DO信号具有短路保护作用3. 电机控制三相变频器4. 工作模式S4-25%-1200次/小时5. 调节扭矩最大停机扭矩的50%6. 防护等级IP677. 湿度小于95%8. 环境温度-25-+60℃9. 安装位置任意位置10. 外壳喷涂环氧搪瓷涂层(RAL9005,黑色);外露螺钉为不锈钢(放油螺塞镀铬)11. EMC抗干扰能力按EMC产品标准EN61800第3部分执行12. EMC辐射按EMC产品标准EN61800第3部分执行13. 抗震能力5-200Hz内0.75g或5-150Hz 内2g ,正弦波14. 模拟量输入4-20mA电隔离250Ω阻抗15. 开关量输入可组态的电隔离无源光电偶合器数字0:-3-+5V数字1:12-35V最短脉宽:50ms16.模拟量输出阀位信号4-20mA,最大负载750Ω,电隔离,带短路保护,上升或下降特性,温度影响≤0.1%/10K17.开关量输出断口标准配置4对无源、继电器镀金触点,可扩展3对或4对,电隔离,任意组态,最大50V,带过载保护,1mA <150MA【选项资料】【接线图】【安装尺寸】。
智能MME800系列调节型 S4-25%/1200次/小时 多转式电动执行器 扭矩30~125 N ·m 操作说明 速度7~35 r/min(用于1.06版本软件的执行器) 10/78—1.05 CN■ 应用本电动执行器结构坚固耐用,适用于操纵端控制元件,广泛应用于能源、化工、石油与天然气、水与污水处理等行业。
附加的齿轮传动装置(用于有限转角、直线运动)能与各种类型的阀门相互匹配使用。
智能型多转式执行器具有多种扩展功能,如自诊断功能,大大地简化了调试工作并可加快工程进度。
MME800系列执行器可以通过使用方便的红外通讯接口或任选的总线接口进行通讯。
模块式结构,规格精简,降低用户备品备件库存量辅助的速度控制能确保在微偏差调节中获得很高的定位精度目录1.适用范围。
2 2.菜单结构和参数设定。
2 3.电气连接。
6 4.红外通讯。
9 5.故障与意外情况处理。
10 6.现场总线。
11 7.附言。
121. 适用范围本操作说明适用范围为软件版本1.06的ONTRAC MME800全系列产品,也可供MOE700全系列产品使用参考。
2. 菜单结构和参数设定ONTRAC产品采用多层树状菜单,操作简单,维护方便。
第一级菜单中除“P0”外,均含有第二级子菜单。
图1工作状态接通三相电后,拨动拨盘可切换“REMOTE”、“O/S”和“LOCAL”工作状态。
执行器处于“REMOTE”状态时,接受远程控制或者现场总线信号进行动作,此时本地操作可观察各状态运行参数,但无法修改参数,也无法通过本地操作驱动执行器。
执行器处于“O/S”状态时,不接受任何驱动信号,但可通过本地操作观察各运行参数,此为出厂预设状态。
执行器处于“LOCAL”状态时,可进行本地操作驱动执行器,并可进行产品运行参数修改。
图2在初始状态(显示“LOCAL”、“REMOTE”或者“O/S”)时,长按“MODE”按钮即可进入第一级菜单。
在显示第一级菜单时短按“MODE”按钮即可退出菜单。
在显示第一级菜单时,可通过“↑”和“↓”按钮进行本级菜单间的切换。
在菜单显示“P0 LANGUAGE”时,长按“MODE”按钮,即可进入语言设定,此时可见菜单显示“P0 ENGLISH”并闪烁,通过“↑”和“↓”按钮可切换至德文菜单,出厂预设为英文。
在第一级菜单显示“P1”~“P6”时,长按“MODE”按钮即可进入相应的第二级菜单。
在本级菜单间可通过“↑”和“↓”按钮进行切换。
短按“MODE”按钮即可退至上一级菜单。
设定值并保存在显示第二级菜单时,长按“MODE”按钮即可进入设定级。
以显示第二级菜单“P1.1 TORQUE—O”时为例,长按“MODE”时可进入开向停机力矩设定,菜单显示当前百份比力矩值和“TORQUE-O”,且数字闪烁,此时用“↑”和“↓”按钮可以调整开向力矩值。
达到调整值后,短按“MODE”按钮,如力矩值未变化,则直接退回到第二级菜单“P1.1 TORQUE_O”,如力矩值变化,则显示调整后的力矩值(此数字稳定)和“SAVE”(此字符闪烁)。
此时按“↑”和“↓”按钮可将“SAVE”切换至“CANCEL”,在“SAVE”状态短按“MODE”按钮,两秒钟后“SAVE”停止闪烁,自动退回至第二级菜单“P1.1 TORQUE_O”,并保存当前调整值,如在“CANCEL”状态短按“MODE”按钮可退回至第二级菜单“P1.1 TORQUE_O”,并不保存当前调整值。
图3用户可参考执行器的实际工作情况和与执行器配合的减速箱选型数据来调整开关向停机力矩和速度。
P1.6和P1.8的量程限定值只有在对应的P1.5和P1.7停机方式选择为量程停机时才有效。
在出厂状态时,用户可直接通过P1.9和P1.10的设定级来设定量程,如用户希望清除目前量程而进行重新设定,需先通过菜单P3.2的设定级清除当前量程。
设定量程时,首先进入P1.9的设定级,此时当屏幕上面一行当显示“- - - - ”,下面一行显示“ADJUST_O”。
按“↑”按钮则执行器逆时针转动(从上往下看,下同),需一直按住,按“↓”按钮则执行器顺时针转动,到达希望的“100%位置”后,放开“↑”或“↓”按钮,执行器停止转动。
短按“MODE”按钮,屏幕出现“SAVE”闪烁,再短按“SAVE”按钮对当前的“100%位置”进行保存。
退至第二级菜单后,再进入P1.10的设定级,此时当屏幕上面一行当显示“- - - - ”,下面一行显示“ADJUST_C”。
同样,按“↑”按钮则执行器逆时针转动,按“↓”按钮则执行器顺时针转动,若当前量程长度超过最小允许量程长度,屏幕上面一行将显示“□□□□”。
到达希望的“0%位置”后,放开“↑”或“↓”按钮,执行器停止转动。
短按“MODE”按钮,屏幕出现“SAVE”闪烁,再短按“SAVE”按钮对当前的“0%位置”进行保存。
设定量程结束后,退出菜单,此时可见屏幕显示当前量程。
切换工作状态至“LOCAL”,按“↑”按钮,则执行器开向运行,按“↓”按钮,则执行器关向运行。
P2的二级菜单-工作方式图4P2的第二级菜单中,P2.1为本地面板操作接受信号方式,即内控制系统接受的信号以脉冲有效或者电平有效。
P2.2为电气接线的开关通道接受信号方式。
P2.3为恢复工厂设置值,选择以后所有运行参数恢复默认值。
P2.4和P2.5为分别以100%和0%为基准的范围宽度,在此范围宽度内,执行器停机力矩为最大力矩值,不受P1.1和P1.2的影响,如MME808为60N·m,这样就能保证阀门在开启和关闭时具有足够的力矩。
图5P3的第二级菜单中,P3.1为系统复位,在设定量程后和遇到故障或报警时,可先进行系统复位操作。
在设定新量程前,应首先通过P3.2清除当前量程(若有)。
P3.3为控制信号的允许方式,对MME800系列产品预设为SETPOINT,即模拟量控制方式,但产品同时也接受开关量控制。
如将P3.3设为STEPCONT,即开关量控制方式,则执行器不接受模拟量控制信号。
P4的第二级菜单-自诊断图6P4的第二级菜单中,P4.1为故障信息显示,P4.2为报警信息显示,P4.3为液晶测试,在测试时液晶屏幕所有字符段均被点亮。
关于故障和报警信息的判断和处理将在后面进行详细描述。
P5的二级菜单-系统参数图7P5的二级菜单中,P5.1为行程全开时间,P5.2为行程全关时间,显示最大值为999秒。
P5.3为最大力矩,如对MME808则为60N·m。
P5.4为系统软件版本,现为1.06。
P5.5为系统硬件版本,现为1.02。
P6的二级菜单-密码图8密码保护功能能够防止从控制装置中输入不合法的参数,用户能够在操作界面上设置密码。
在操作界面上必须输入密码后才能对执行器进行参数化。
密码由四位数字组成。
总是可以用现场操作装置运行执行器。
若因密码保护封锁参数化功能,则液晶屏幕显示钥匙符号。
执行器出厂时,根据批号、序号均带有内设密码,通过菜单P6.1和P6.2可激活或屏蔽。
出厂预设状态应为屏蔽状态。
用户可通过菜单P6.2进行激活密码保护。
进入P6.2的设定级,可见屏幕显示“P6.2 SET”,短按“MODE”按钮,可见“SAVE”闪烁,再短按“MODE”按钮,“SAVE”闪烁两秒钟后自动退回第二级菜单。
此时,如退出菜单,可见屏幕左上显示钥匙符号,在此状态下,所有运行参数均不可调整。
如欲屏蔽密码,则进入P6.1的设定级,可见屏幕上面一行显示“0000”,且其中一位闪烁。
此时按“↑”按钮则可改变闪烁位的数字,按“↓”按钮则可移动闪烁位。
带调整至与供应商移交给用户的密码值一致时,短按“MODE”按钮,保存设定退出,即可屏蔽密码,此时运行参数可进行修改。
3. 电气连接MME800系列产品本体具有四路开关量输出通道和四路开关量输入通道。
标准配置的通道扩展有两种,一种为编号为385(图9),扩展四路开关量加一路模拟量位置反馈通道;另一种编号为387(图10),扩展三路开关量通道加一路模拟量位置给定通道和一路模拟量位置反馈通道。
各端口电气特性如下:模拟量输入:4~20mA,电气隔离,输入阻抗250欧姆,上升特性(即4mA对应量程0%位置,20mA对应量程100%位置)。
开关量输入:任意组态的电气隔离的无源光电耦合器。
低电平:-3~﹢5V或者开路;高电平:﹢12~35V。
模拟量输出:0/4~20mA对应0%~100%位置,上升或下降特性,温度影响≦0.1%/10K,最大负载阻抗为500欧姆,短路保护,电气隔离。
开关量输出:任意组态的无源隔离继电器触点;最大电压50V,过载保护,Imax<150mA,Imin>1mA;触点形式为DTC/NO,见接线图。
端口功能如下:输入端口:功能 标准配置端口执行器开向指令 BE1执行器关向指令 BE2手动/自动切换指令 BE3报警复位指令 BE4允许开 -允许关 -现场控制盘禁操指令 -减至第二档速度指令 -输出端口:功 能 工 作 模 式 标 准 设 置 运行准备信号 正向 反向 BA1故障报警 正向 反向 BA2 开向终端位置 正向 反向 BA3关向终端位置 正向 反向 BA4开向过力矩 正向 反向 BA5关向过力矩 正向 反向 BA6预计阀位1到达 正向 反向 BA7预计阀位2到达 正向 反向 BA8 “远程控制”工作模式 正向 反向 -“现场控制”工作模式 正向 反向 -执行器运行(连续信号) 正向 反向 -执行器运行(脉冲信号) 正向 反向 - 开向运行/终端阀位指示(脉冲/连续信号) 正向 反向 -关向运行/终端阀位指示(脉冲/连续信号) 正向 反向 - 手动/自动状态 正向 反向 -所有信号电缆都须屏蔽,只在执行器端接地。
电源电缆为≦6mm2的非挠性电缆或4 mm2的挠性电缆。
信号电缆为≦2.5mm2的挠性或非挠性电缆。
MME808+385形式的端子结构图9MME808+387形式的端子结构图10接线示例1—开关量控制方式图11将执行器上的拨盘选择开关打到“REMOTE”位置,选择远程操作。
如21端口接通11端口,则开关量输入通道BE1得到高电平,执行器开向运行。
如21端口接通13端口,则开关量输入通道BE2得到高电平,执行器关向运行。
如BE1、BE2通道均未得到高电平,则执行器停止运行。
如给予BE3通道高电平,则当BE1、BE2通道均未得到高电平时,执行器默认运行至0%量程位置。
接线示例2-模拟量控制方式(仅用于387方式通道扩展)图12如上图示例,给予开关量输入通道BE3高电平,执行器上拨盘开关打至“REMOTE”位置,执行器即可根据33/34端口上的模拟电流值进行跟踪运行。
如控制电流环断裂,或者取消BE3通道上的高电平,执行器停止运行。