整车坐标系的转换步骤
- 格式:doc
- 大小:1.06 MB
- 文档页数:2
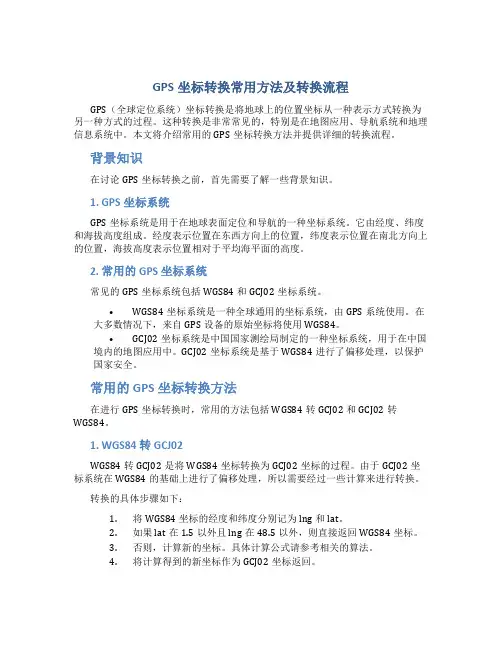
GPS坐标转换常用方法及转换流程GPS(全球定位系统)坐标转换是将地球上的位置坐标从一种表示方式转换为另一种方式的过程。
这种转换是非常常见的,特别是在地图应用、导航系统和地理信息系统中。
本文将介绍常用的GPS坐标转换方法并提供详细的转换流程。
背景知识在讨论GPS坐标转换之前,首先需要了解一些背景知识。
1. GPS坐标系统GPS坐标系统是用于在地球表面定位和导航的一种坐标系统。
它由经度、纬度和海拔高度组成。
经度表示位置在东西方向上的位置,纬度表示位置在南北方向上的位置,海拔高度表示位置相对于平均海平面的高度。
2. 常用的GPS坐标系统常见的GPS坐标系统包括WGS84和GCJ02坐标系统。
•WGS84坐标系统是一种全球通用的坐标系统,由GPS系统使用。
在大多数情况下,来自GPS设备的原始坐标将使用WGS84。
•GCJ02坐标系统是中国国家测绘局制定的一种坐标系统,用于在中国境内的地图应用中。
GCJ02坐标系统是基于WGS84进行了偏移处理,以保护国家安全。
常用的GPS坐标转换方法在进行GPS坐标转换时,常用的方法包括WGS84转GCJ02和GCJ02转WGS84。
1. WGS84转GCJ02WGS84转GCJ02是将WGS84坐标转换为GCJ02坐标的过程。
由于GCJ02坐标系统在WGS84的基础上进行了偏移处理,所以需要经过一些计算来进行转换。
转换的具体步骤如下:1.将WGS84坐标的经度和纬度分别记为lng和lat。
2.如果lat在1.5以外且lng在48.5以外,则直接返回WGS84坐标。
3.否则,计算新的坐标。
具体计算公式请参考相关的算法。
4.将计算得到的新坐标作为GCJ02坐标返回。
2. GCJ02转WGS84GCJ02转WGS84是将GCJ02坐标转换为WGS84坐标的过程。
由于GCJ02坐标系统相对于WGS84进行了偏移处理,所以需要进行逆运算才能得到原始的WGS84坐标。
转换的具体步骤如下:1.将GCJ02坐标的经度和纬度分别记为lng和lat。
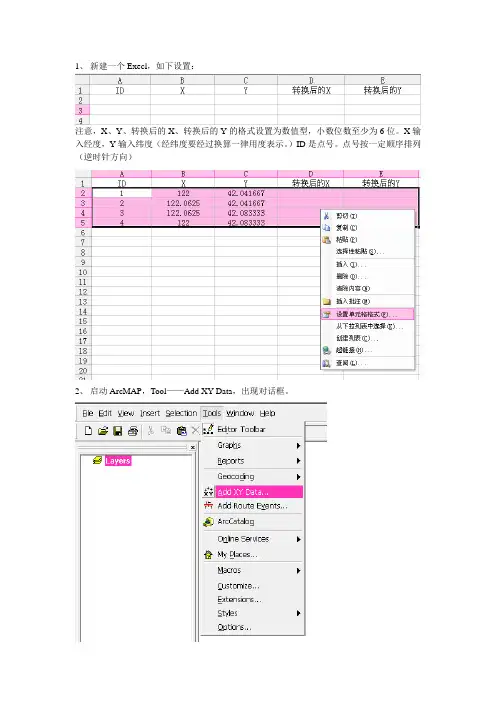
1、新建一个Execl,如下设置:注意,X、Y、转换后的X、转换后的Y的格式设置为数值型,小数位数至少为6位。
X输入经度,Y输入纬度(经纬度要经过换算一律用度表示。
)ID是点号。
点号按一定顺序排列(逆时针方向)2、启动ArcMAP,Tool——Add XY Data,出现对话框。
3、在对话框第一项里选择事先编辑好的Execl文件,观察X Filed和Y Filed 分别与Execl 里的X、Y对应。
4、点击“Edit”,选择“Select “,选择”Geographic Coordinate Systems “,——”Asia “。
根据图的左下角信息,判断是北京54还是西安80的坐标系,从而进行选择。
点击“确定“——”OK“——确定。
5、右击右面表格名称,选择“Label Feature “,点旁边注明点号,四个点就在绘图区站出来了。
6、点击右面工具条里的,双击点,可以查询点的准确坐标。
7、点击“View“里的”Data Frame Properties“,选择”Coordinate Systems“,选择”Predefined“里的”Projected Coordinate Systems “,再选择”Gauss Kruger“,根据图的左下角信息选择北京54或者西安80。
进入选项后,再根据图上格网横向坐标值前两位数字判断是40带还是41带(都是3度带),来进一步选择。
8、经过以上操作后,点的经纬度坐标已经转成以米为单位的坐标了。
利用查询工具,查出四个点的X、Y坐标,复制粘贴到第一步中建好的Execl中的“转换后的X、转换后的Y“里面,便于下一步在ERDAS中纠正。
自动驾驶中,utm坐标系转自车坐标系的方法
在自动驾驶中,将UTM坐标系转换为自车坐标系的常用方法
是使用传感器数据进行坐标转换。
以下是一种常见的转换方法:
1. 首先,获取自车的当前位置和方向信息,通常可以通过
GPS和车辆惯性测量单元(IMU)来获取。
2. 获取自车当前位置的UTM坐标。
3. 使用UTM坐标系的原点作为参考点,计算自车当前位置相
对于原点的平移矢量。
4. 将平移矢量投影到车辆坐标系的X轴和Y轴上,得到相对
于车辆坐标系的平移矢量。
5. 获取自车当前方向的角度信息。
6. 将UTM坐标系的Y轴旋转到车辆坐标系的Y轴方向,并
计算旋转角度。
7. 将平移矢量和旋转角度应用到自车坐标系中,得到UTM坐
标系相对于自车坐标系的转换矩阵。
8. 使用转换矩阵将UTM坐标系中的目标点或障碍物位置转换
为自车坐标系中的位置。
这种方法可以根据车辆当前位置和方向的变化实时更新转换矩
阵,以实现准确的坐标转换。
注意,由于UTM与自车坐标系之间可能存在旋转和缩放的关系,因此在实际应用中可能需要校准和调整转换方法。
坐标转换方法范文坐标转换是指将一个坐标系上的点转换成另一个坐标系上的点的操作。
在地理信息系统(GIS)及其他相关领域中,坐标转换是非常重要的。
本文将详细介绍常见的二维坐标转换方法,包括平移、旋转、缩放和镜像。
1.平移:平移是将一个坐标系上的点沿一些方向按一定距离移动到新的位置。
平移操作可以用向量相加来表示。
设点A的坐标为(x1, y1) ,平移向量为(tx, ty),则点A'的坐标为(x1 + tx, y1 + ty)。
2.旋转:旋转是将一个坐标系上的点绕一些中心点按一定角度旋转。
旋转操作可以用矩阵运算来表示。
设点B的坐标为(x2, y2),旋转角度为θ,旋转中心为点C(cx, cy),则点B'的坐标为((x2 - cx) * cosθ - (y2 - cy) * sinθ + cx, (x2 - cx) * sinθ + (y2 - cy) * cosθ + cy)。
3.缩放:缩放是将一个坐标系上的点按照一定比例进行扩大或缩小。
缩放操作可以用矩阵运算来表示。
设点D的坐标为(x3, y3),在x轴和y轴上的缩放比例分别为sx和sy,则点D'的坐标为(x3 * sx, y3 * sy)。
4.镜像:镜像是将一个坐标系上的点相对于一些轴进行对称变换。
镜像操作可以用矩阵运算来表示。
设点E的坐标为(x4,y4),镜像轴为x轴,则点E'的坐标为(x4,-y4)。
以上是常见的二维坐标转换方法。
在实际应用中,我们常常需要综合使用多种方法进行坐标转换。
例如,当我们需要将一个点先平移,再旋转,最后进行缩放时,可以按照此顺序依次进行相应操作。
需要注意的是,不同的坐标系有不同的表示方法和计算规则。
因此,在进行坐标转换时,需要先了解两个坐标系的具体定义和规则,然后再选择合适的转换方法。
总之,坐标转换是GIS及其他相关领域中重要的一部分。
掌握多种坐标转换方法可以帮助我们更好地进行空间数据处理和分析。
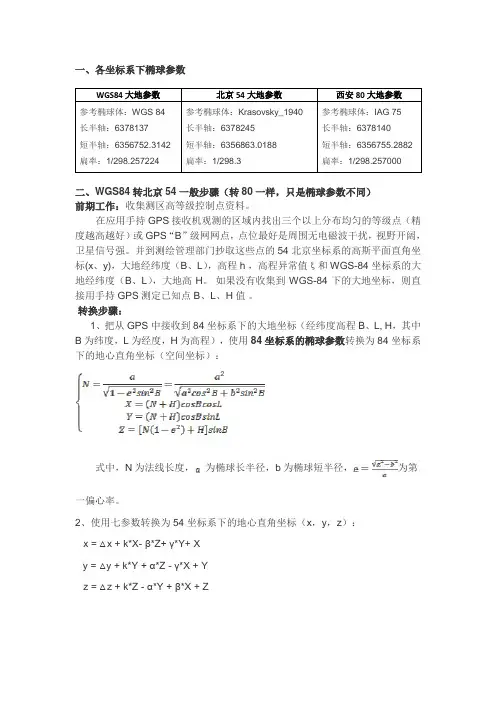
一、各坐标系下椭球参数WGS84大地参数北京54大地参数西安80大地参数参考椭球体:WGS 84 长半轴:6378137短半轴:6356752.3142 扁率:1/298.257224 参考椭球体:Krasovsky_1940长半轴:6378245短半轴:6356863.0188扁率:1/298.3参考椭球体:IAG 75长半轴:6378140短半轴:6356755.2882扁率:1/298.257000二、WGS84转北京54一般步骤(转80一样,只是椭球参数不同)前期工作:收集测区高等级控制点资料。
在应用手持GPS接收机观测的区域内找出三个以上分布均匀的等级点(精度越高越好)或GPS“B”级网网点,点位最好是周围无电磁波干扰,视野开阔,卫星信号强。
并到测绘管理部门抄取这些点的54北京坐标系的高斯平面直角坐标(x、y),大地经纬度(B、L),高程h ,高程异常值ξ和WGS-84坐标系的大地经纬度(B、L),大地高H。
如果没有收集到WGS-84下的大地坐标,则直接用手持GPS测定已知点B、L、H值。
转换步骤:1、把从GPS中接收到84坐标系下的大地坐标(经纬度高程B、L, H,其中B为纬度,L为经度,H为高程),使用84坐标系的椭球参数转换为84坐标系下的地心直角坐标(空间坐标):式中,N为法线长度,为椭球长半径,b为椭球短半径,为第一偏心率。
2、使用七参数转换为54坐标系下的地心直角坐标(x,y,z):x = △x + k*X- β*Z+ γ*Y+ Xy = △y + k*Y + α*Z - γ*X + Yz = △z + k*Z - α*Y + β*X + Z其中,△x,△y,△z为三个坐标方向的平移参数;α,β,γ为三个方向的旋转角参数;k为尺度参数。
(采用收集到的控制点计算转换参数,并需要验证参数)在小范围内可使用七参数的特殊形式即三参数,即k、α、β、γ都等于0,变成:x = △x+ Xy = △y+ Yz = △z + Z3、根据54下的椭球参数,将第二步得到的地心坐标转换为大地坐标(B54,L54,H54)计算B时要采用迭代,推荐迭代算法为:4、根据工程需要以及各种投影(如高斯克吕格)规则进行投影得到对应的投影坐标,即平面直角坐标。
测绘技术中常见的坐标系统及其转换方法导语:测绘技术是以获取、处理、分析地理空间数据为基础的专业领域,而坐标系统则是测绘技术中的重要概念。
本文将介绍测绘技术中常见的坐标系统及其转换方法,以帮助读者更好地理解和应用测绘技术。
1. 地理坐标系统地理坐标系统是测绘技术中最常见的坐标系统之一。
它使用经度和纬度来描述地球上的位置。
经度表示地球表面上一个点位于东西方向上的角度,纬度表示位于南北方向上的角度。
这种坐标系统常用于地图制作、导航等领域。
2. 平面坐标系统平面坐标系统是测绘技术中另一种常见的坐标系统。
它将地球表面分为各种局部平面,在每个局部平面上使用平面坐标来描述位置。
不同的平面坐标系统有不同的坐标原点和坐标轴方向,但都以米为单位。
这种坐标系统常用于城市规划、土地管理等领域。
3. UTM坐标系统UTM坐标系统(通用横轴墨卡托投影坐标系统)是一种常用的平面坐标系统。
它将地球表面划分为60个横向带和20个纵向带,每个带的中央子午线用作坐标原点。
该坐标系统使用东北方向的坐标来描述位置,其中东方向的坐标称为Easting,北方向的坐标称为Northing。
UTM坐标系统广泛应用于测绘工程、导航和地理信息系统等领域。
4. 地方坐标系统地方坐标系统是一种根据具体地方特性而设定的坐标系统,在特定地区使用。
不同地方坐标系统可能使用不同的投影方法和坐标单位。
例如,中国在大范围地图制作和测绘工程中使用的是高斯-克吕格投影坐标系统,以保证地图坐标的准确性。
地方坐标系统在局部区域的测绘和工程项目中具有重要作用。
5. 坐标系统转换方法坐标系统转换是测绘技术中常见且必要的操作。
由于不同坐标系统使用不同的参考标准和投影方法,经纬度与平面坐标之间的转换需借助转换方法。
常见的坐标系统转换方法包括大地坐标系向平面坐标系的转换、不同平面坐标系之间的转换等。
大地坐标系向平面坐标系的转换通常需要根据椭球体参数进行计算。
这种转换方法常用于将GPS采集的经纬度坐标转换为所需的平面坐标。
坐标系转换和基准面处理的技术方法在地理信息系统(GIS)和测量领域,坐标系转换和基准面处理是非常重要的技术方法。
这些方法涉及将不同坐标系之间的地理位置进行转换,并将测量数据配准到一个统一的基准面上。
本文将介绍坐标系转换和基准面处理的一些常见技术方法。
一、坐标系转换1. 参数法参数法是一种常见的坐标系转换方法。
它通过建立两个坐标系之间的数学映射关系,将一个坐标系中的坐标转换为另一个坐标系中的坐标。
这需要知道两个坐标系之间的转换参数,例如平移、旋转和缩放等。
常见的参数法坐标系转换方法有七参数法、四参数法和三参数法。
2. 插值法插值法是另一种常见的坐标系转换方法。
它通过在已知坐标点上进行插值,推导出其他位置的坐标。
插值法常用于无法获得精确转换参数的情况下,例如地形变形或大范围地理测量。
3. 数学模型法数学模型法是一种更复杂的坐标系转换方法,它使用数学模型描述坐标系之间的变换关系。
这些数学模型通常基于地球椭球体形状和旋转参数,并涉及到大量的复杂计算。
数学模型法通常用于高精度测量或大范围区域的坐标转换。
二、基准面处理基准面处理是将测量数据从一个基准面转换到另一个基准面的过程。
这是因为地球的形状和地球引力场的不均匀性导致不同地区的基准面存在差异。
基准面处理的常见技术方法包括以下几种。
1. 大地水准面处理大地水准面是指所有点的高程都被定义为基准面上的高程。
然而,由于地球形状的复杂性,大地水准面通常是曲面而非平面。
通过利用测量数据,使用数学模型和插值方法,可以将数据转换到统一的大地水准面上。
2. 椭球面处理地球的形状通常被近似为一个椭球体。
椭球面处理是将数据从现实世界的三维空间转换为椭球面上的二维坐标的过程。
这可以通过使用地理坐标系和数学椭球体模型来实现。
3. 高程转换高程转换是将一个基准面上的高程转换为另一个基准面上的高程的过程。
这需要使用大地水准面和椭球面处理的方法,以及考虑到基准面差异带来的高程变化。
总结综上所述,坐标系转换和基准面处理是地理信息系统和测量领域中的重要技术方法。
零部件坐标系转变为整车坐标系
1、在CATIA中建立一个20*20的正方体
起下部红线边处做出一个球形切割,半径R=4,作为坐标系的指示,该零部件的坐标系即CATIA中的默认世界坐标系。
2、另外建立一个球体,半径R=4,其球心与CATIA中的世界坐
标系中心重合
3、建立好的球模型
4、建立一个PRODUCT文件,并将立方体模型直接装配进去可
以发现,若不对其进行移动操作,立方体的默认世界坐标系与PRODUCT的坐标系是重合的。
5、直接调入球体,默认放置位置为坐标系重合状态
6、建立约束,使二者正确装配,更新。
可以看到,球体的世界
坐标系位置与PRODUCT的世界坐标系不重合
7、在PRODUCT中新建立一个零部件
零部件的坐标系原点定义为装配体原点,即选择“否”
8、可以发现,新建立的零部件的坐标系的位置和装配体的世界
坐标系是重合的
9、激活(或不激活)球体零部件的“PART”按钮,以便可以选择
其中的零部件几何体来进行复制
10、再激活刚才新建立的在组建坐标系下的零部件的“PART”,
并在其“零部件几何体”处单击鼠标右键,选择“特殊粘贴”
11、选择“作为结果”来进行粘贴
12、隐藏原来的球体文件,并选中在
新建立的零部件中的粘贴的“几
何体”及其坐标系,可以发现,
现在这个零件中,不仅球体处在
正确的装配位置,且其零部件的
坐标系与组件的坐标系重合,也
即,若直接在PRODUCT中载入
新建之PART1文件,其可自动放
置在正确的位置上。
整车坐标系确认标准整车坐标系确认标准⼀、概述:在汽车设计中,确定整车坐标系是整车设计的第⼀步,是逆向设计时确定整车坐标系的依据,同时也可作为正向设计的参考,它是整车数字化设计的基准,是对零部件位置特征进⾏描述的依据。
特编制本⽅法、流程及技术要求,使其规范化。
本⽅法采⽤:美国EDS 公司出品的点云处理软件“Imageware”。
⼆、引⽤⽂件:下列⽂件中的条款通过本标准的引⽤⽽成为本标准的条款。
凡是注⽇期的引⽤⽂件,其随后所有的修改单(不包括勘误的内容)或修订版均不适⽤于本标准,然⽽,⿎励根据本标准达成协议的各⽅研究是否可使⽤这些⽂件的最新版本。
凡是不注⽇期的引⽤⽂件,其最新版本适⽤于本标准。
GB/T19234-2003 乘⽤车尺⼨代码GB/T3730.3- 1992 汽车和挂车的术语及其定义车辆尺⼨三、定义:3.1、整车三维坐标系:整车三维坐标系指车辆制造⼚在最初设计阶段确定的三个正交平⾯组成的坐标系统,这三个基准平⾯是:1) Y基准平⾯:车辆纵向对称的铅垂平⾯;2) X基准平⾯:垂直于Y基准平⾯的铅垂平⾯。
3) Z基准平⾯:垂直于Y和X基准平⾯的⽔平⾯。
备注:规定X基准平⾯的后⽅,Y基准平⾯的右⽅和Z基准平⾯的上⽅为正值,反⽅向为负值。
3.2、设计质量:按照国家对乘⽤车相关标准,设计质量为整车整备质量与乘员质量之和。
按照国家标准乘员质量分布为:前排座椅加载2⼈,后排中间加载1⼈。
其中单个⼈体质量为68kg,加载质量总计204kg。
3.3、点云:指采⽤FARO或者其他激光扫描设备采集的样车三维坐标描述数据⽂件。
四、设计要求:整车坐标系确定的技术条件和质量具体控制要求如下:4.1 采⽤右⼿坐标系法则,符合国际规范;4.2 如果是逆向设计,应充分理解原车的设计意图;新确定的坐标系应尽量逼近原车坐标系。
4.3 X0 在前轮中⼼(设计状态)或车⾝前部⼀固定点;4.4 Y0垂直于Y基准平⾯并通过设计质量下前轮轮⼼连线与Y基准平⾯交点的铅垂平⾯,即车辆左右对称中⼼;4.5 Z0垂直于Y和X基准平⾯并通过地板纵梁上平⾯的⽔平平⾯,即地板下平⾯即纵梁上平⾯;4.6 整车外表⾯点云的密度分布均匀,扫描时车⾝除⾃⾝外不承受其他外⼒;4.7 设计状态下的前车轮点云扫描时左右轮胎⽓压最⼤相差10kpa,车轮打正;4.8 扫描地板下平⾯及纵梁点云时,要求把地板胶铲除,并尽量多的扫描变形较⼩的和较平整的部位。
COORD坐标转换流程COORD(Cartesian Offset Positioning System)是一种用于坐标转换的技术。
它通过将一个坐标系的坐标转换为另一个坐标系的坐标,实现不同坐标系之间的通信和数据交换。
COORD坐标转换流程可以分为以下几个步骤:1.定义坐标系:首先需要定义需要进行转换的两个坐标系,分别为源坐标系和目标坐标系。
源坐标系是已知的或者已经使用的坐标系,而目标坐标系是需要转换到的坐标系。
2.建立坐标系转换关系:将源坐标系和目标坐标系之间的转换关系建立起来,主要是通过确定源坐标系和目标坐标系之间的转换参数来实现。
这些转换参数包括旋转、平移和缩放等。
3.采集源坐标数据:从源坐标系中获取需要转换的原始坐标数据。
这些数据可以是从传感器或者其他设备中采集的实时数据,也可以是从存储介质(如数据库)中读取的历史数据。
4.进行坐标系转换:根据建立的转换关系和采集到的源坐标数据,进行坐标系转换。
具体的转换方法根据源坐标系和目标坐标系的不同而有所差异,通常包括旋转、平移和缩放等计算。
5.输出目标坐标数据:将转换后的目标坐标数据输出给需要使用的设备或者系统。
这些数据可以被用于导航、定位、测量等应用中。
在实际应用中,COORD坐标转换可以用于各种领域,包括地理信息系统(GIS)、机器人导航、航空航天等。
例如,在GIS中,将不同地图坐标系之间的坐标转换为统一的坐标系,可以实现地图之间的叠加和交互。
在机器人导航中,将机器人在不同坐标系下的定位信息进行转换,可以实现机器人在不同地点之间的导航和路径规划。
在实际应用中,COORD坐标转换需要考虑以下几个关键问题:1.坐标系的定义和建立:正确定义和建立坐标系是进行坐标转换的前提,需要准确描述坐标系的原点和轴向,以及坐标单位等。
同时,需要确定源坐标系和目标坐标系之间的转换参数,以便正确进行坐标转换。
2.坐标数据的采集和处理:坐标数据的采集是进行坐标转换的基础,需要通过传感器或者其他设备获取准确的源坐标数据。
坐标系转换实施方案在地图制图和测量领域,坐标系转换是一个非常重要的问题。
不同的测量设备和地图制图软件可能使用不同的坐标系,因此需要将数据进行坐标系转换才能进行有效的数据处理和分析。
本文将介绍一种实施方案,用于解决坐标系转换的相关问题。
首先,我们需要明确不同坐标系之间的关系。
常见的地理坐标系包括经纬度坐标系、高斯-克吕格坐标系、UTM坐标系等。
这些坐标系之间的转换涉及到大地测量学中的椭球参数、投影方式等复杂的数学模型。
因此,为了实现坐标系转换,我们需要借助专业的地图测绘软件或者编程语言来进行处理。
其次,我们需要选择合适的坐标系转换工具。
在市面上有很多专业的地图测绘软件,比如ArcGIS、AutoCAD等,这些软件都提供了坐标系转换的功能。
通过这些软件,我们可以方便地将不同坐标系的数据进行转换,并且进行地图投影、坐标转换等操作。
此外,我们还可以借助一些开源的地图投影库,比如Proj4库,来实现坐标系转换的功能。
另外,我们还可以通过编程语言来实现坐标系转换。
比如,在Python语言中,有一些非常成熟的地理信息处理库,比如GDAL、Shapely等,这些库提供了丰富的地理信息处理函数,可以方便地实现坐标系转换、地图投影等功能。
通过编程,我们可以批量处理大量的地理数据,实现自动化的坐标系转换。
最后,我们需要注意坐标系转换的精度和误差控制。
在进行坐标系转换时,由于不同坐标系之间的数学模型存在近似计算,因此会引入一定的转换误差。
为了控制转换误差,我们需要选择合适的数学模型和参数,以及合适的转换算法。
此外,我们还需要对转换后的数据进行精度评定,确保转换后的数据满足我们的精度要求。
综上所述,坐标系转换是地图制图和测量领域中一个非常重要的问题。
通过选择合适的坐标系转换工具,借助专业的地图测绘软件或者编程语言,以及注意转换精度和误差控制,我们可以实现高效、精确的坐标系转换,为地图制图和测量工作提供有力的支持。
整车坐标系确认标准一、概述:在汽车设计中,确定整车坐标系是整车设计的第一步,是逆向设计时确定整车坐标系的依据,同时也可作为正向设计的参考,它是整车数字化设计的基准,是对零部件位置特征进行描述的依据。
特编制本方法、流程及技术要求,使其规范化。
本方法采用:美国EDS 公司出品的点云处理软件“Imageware”。
二、引用文件:下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
GB/T19234-2003 乘用车尺寸代码GB/T3730.3- 1992 汽车和挂车的术语及其定义车辆尺寸三、定义:3.1、整车三维坐标系:整车三维坐标系指车辆制造厂在最初设计阶段确定的三个正交平面组成的坐标系统,这三个基准平面是:1) Y基准平面:车辆纵向对称的铅垂平面;2) X基准平面:垂直于Y基准平面的铅垂平面。
3) Z基准平面:垂直于Y和X基准平面的水平面。
备注:规定X基准平面的后方,Y基准平面的右方和Z基准平面的上方为正值,反方向为负值。
3.2、设计质量:按照国家对乘用车相关标准,设计质量为整车整备质量与乘员质量之和。
按照国家标准乘员质量分布为:前排座椅加载2人,后排中间加载1人。
其中单个人体质量为68kg,加载质量总计204kg。
3.3、点云:指采用FARO或者其他激光扫描设备采集的样车三维坐标描述数据文件。
四、设计要求:整车坐标系确定的技术条件和质量具体控制要求如下:4.1 采用右手坐标系法则,符合国际规范;4.2 如果是逆向设计,应充分理解原车的设计意图;新确定的坐标系应尽量逼近原车坐标系。
4.3 X0 在前轮中心(设计状态)或车身前部一固定点;4.4 Y0垂直于Y基准平面并通过设计质量下前轮轮心连线与Y基准平面交点的铅垂平面,即车辆左右对称中心;4.5 Z0垂直于Y和X基准平面并通过地板纵梁上平面的水平平面,即地板下平面即纵梁上平面;4.6 整车外表面点云的密度分布均匀,扫描时车身除自身外不承受其他外力;4.7 设计状态下的前车轮点云扫描时左右轮胎气压最大相差10kpa,车轮打正;4.8 扫描地板下平面及纵梁点云时,要求把地板胶铲除,并尽量多的扫描变形较小的和较平整的部位。
坐标转换与变换的使用方法在计算机领域中,坐标转换与变换是一个非常重要的概念。
它经常被用于图形处理、计算机视觉以及地理信息系统等领域。
简单的说,坐标转换与变换是将一个坐标点从一个坐标系(例如笛卡尔坐标系)转换到另一个坐标系的过程。
下面将介绍坐标转换与变换的使用方法,以及一些常见的应用案例。
1. 坐标转换坐标转换是将一个坐标点从一个坐标系转换到另一个坐标系的过程。
它包括两个主要步骤:坐标点的投影和坐标点的旋转。
坐标点的投影是将点从一个坐标系的平面投影到另一个坐标系的平面,而坐标点的旋转是将点在平面上进行旋转,改变坐标点的朝向。
在实际应用中,坐标转换经常被用于地理信息系统(GIS)中。
例如,将地球表面的经纬度坐标转换为笛卡尔坐标系的平面坐标,或者将一个点在地理坐标系中的坐标转换到另一个地理坐标系中。
这种转换可以帮助人们在地图上准确地标记位置,进行导航等。
2. 坐标变换坐标变换是在同一坐标系下对坐标点进行变换,改变坐标点的位置、尺度或方向。
常见的坐标变换包括平移、缩放和旋转。
平移是将坐标点在坐标系中沿着某个方向移动一定的距离。
通过平移,我们可以改变坐标点的位置,实现在图像中移动物体的效果。
缩放是通过改变坐标点的坐标轴比例来调整坐标点的尺度。
通过缩放,我们可以放大或缩小图像中的物体,实现比例变换的效果。
旋转是通过改变坐标点的朝向来实现坐标点的旋转。
通过旋转,我们可以改变物体的方向或角度,实现图像旋转的效果。
3. 应用案例坐标转换与变换在许多领域中都有广泛的应用。
下面将介绍一些常见的应用案例。
3.1 图形处理在图形处理中,坐标转换与变换被广泛用于图像的处理和变换。
通过坐标转换与变换,我们可以实现图像的缩放、旋转、平移等操作。
例如,可以将一张图像进行缩放,以适应不同大小的屏幕;或者将图像进行旋转,改变图像的朝向。
3.2 计算机视觉在计算机视觉中,坐标转换与变换被用于物体的检测、跟踪和识别等任务。
通过将物体在图像中的坐标转换到三维空间中的坐标,我们可以进行物体的三维姿态估计、运动估计等操作。
测绘技术中的坐标系转换方法及精度评估引言:测绘技术是一门关于地球形状测量、地球表面及其上各种对象的测量、计算、制图、刻度、记录、存储与再现的学科。
坐标系转换是测绘技术中的一个重要环节,它将不同坐标系下的数据进行转换以满足不同需求。
本文将介绍测绘技术中常用的坐标系转换方法,并探讨如何评估其精度。
一、坐标系转换方法1.1 大地水准面转换大地水准面转换是将地球椭球体上的高程数据转换为平面坐标数据的方法。
常用的转换方法有正算和反算两种。
正算是通过已知的椭球体参数、基准点的经纬度和高程,计算出对应的平面坐标。
反算则相反,通过已知的平面坐标计算出对应的经纬度和高程。
1.2 平面坐标转换平面坐标转换通常指的是将地球表面上的经纬度坐标转换为平面坐标。
这种转换方法常用于地图制图和地理信息系统等领域。
常见的转换方法有高斯投影法、墨卡托投影法等。
1.3 高程数据转换高程数据转换是将不同高程数据间进行转换的方法。
常见的高程数据包括正常高、大地高、椭球高等。
转换方法主要有高程差法、高程变换法等。
二、精度评估精度评估是对坐标系转换结果进行准确性和可靠性的评估。
常见的评估方法有以下几种。
2.1 残差分析法残差分析法是通过对已知控制点进行观测,得到转换后的坐标与实际坐标之间的差异,从而评估坐标系转换的精度。
该方法适用于小范围的转换评估。
2.2 精度评定法精度评定法是通过对已知控制点进行观测,计算出转换前后坐标之间的差异,从而评估转换的精度。
这种方法需要较多的控制点,并且对控制点的选择有一定要求。
2.3 网形控制法网形控制法是通过建立一定数量的控制网,测量控制网上的点在转换前后的坐标差异,并根据这些差异来评估转换的精度。
这种方法适用于大范围的转换评估。
2.4 统计分析法统计分析法是通过对转换前后坐标差异的统计分析来评估转换的精度。
常用的统计分析方法包括平均误差分析、方差分析等。
结论:在测绘技术中,坐标系转换是一个重要的环节,它可以将不同坐标系下的数据进行转换以满足不同需求。
发动机坐标角度与整车坐标角度转换方法一、概述汽车是人们日常生活中不可或缺的交通工具,而发动机是汽车的核心部件之一,其工作状态和性能对整车的驾驶和行驶性能有着至关重要的影响。
在汽车的设计、生产和维护过程中,对发动机和整车的各项参数和角度进行准确的测量和转换是非常重要的。
本文将重点介绍发动机坐标角度与整车坐标角度的转换方法,以帮助读者更好地了解和应用这一领域的知识。
二、发动机坐标角度的定义与测量1. 发动机坐标角度的定义:发动机坐标角度是指发动机内部各个零部件之间的相对位置和角度关系。
通常用一定的坐标系和角度单位来描述和测量发动机的各项参数。
2. 发动机坐标角度的测量方法:通常采用测量仪器和设备来对发动机的各个部件进行准确的角度测量,其中包括传感器、测角仪等设备。
通过这些设备可以实现对发动机内部各个部件的角度和位置的精确测量。
三、整车坐标角度的定义与测量1. 整车坐标角度的定义:整车坐标角度是指整个汽车车身和各个零部件之间的相对位置和角度关系。
通常用一定的坐标系和角度单位来描述和测量整车的各项参数。
2. 整车坐标角度的测量方法:通常采用三维测量仪和车辆坐标角度测量系统来对整车的各个部件进行准确的角度测量,通过这些设备可以实现对整车车身和各个零部件的角度和位置的精确测量。
四、发动机坐标角度与整车坐标角度的转换方法在实际的汽车设计、生产和维护过程中,经常需要将发动机坐标角度转换为整车坐标角度或者将整车坐标角度转换为发动机坐标角度,以实现对整车和发动机各项参数的精确控制和调整。
下面将介绍发动机坐标角度与整车坐标角度的转换方法:1. 坐标系转换:首先需要确定发动机坐标系和整车坐标系之间的相对位置和转换关系,包括坐标系原点、坐标轴方向等。
通常需要进行精确的测量和标定,确保坐标系的准确对应。
2. 角度转换:在确定了坐标系之后,需要对发动机坐标角度和整车坐标角度进行准确的转换。
通常采用三维向量和矩阵运算等数学方法来实现坐标角度的转换计算。
零部件转化为整车坐标系
零部件坐标系转变为整车坐标系
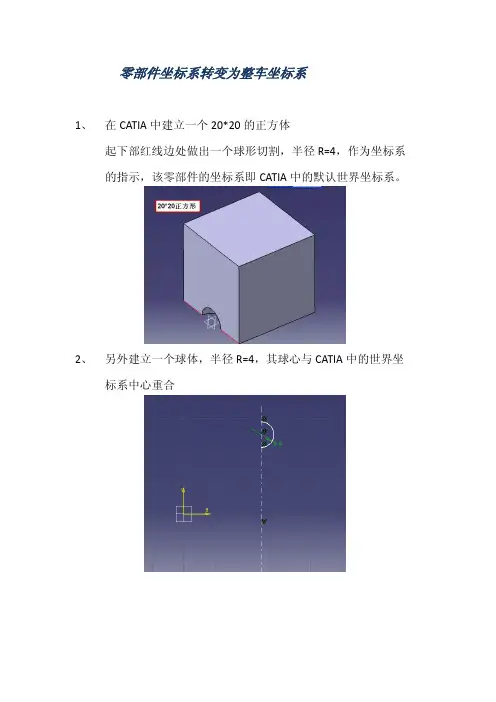
1、在CATIA中建立一个20*20的正方体
起下部红线边处做出一个球形切割,半径R=4,作为坐标系的指示,该零部件的坐标系即CATIA中的默认世界坐标系。
2、另外建立一个球体,半径R=4,其球心与CATIA中的世界坐
标系中心重合
3、建立好的球模型
4、建立一个PRODUCT文件,并将立方体模型直接装配进去可
以发现,若不对其进行移动操作,立方体的默认世界坐标系与PRODUCT的坐标系是重合的。
5、直接调入球体,默认放置位置为坐标系重合状态
6、建立约束,使二者正确装配,更新。
可以看到,球体的世界
坐标系位置与PRODUCT的世界坐标系不重合
7、在PRODUCT中新建立一个零部件
零部件的坐标系原点定义为装配体原点,即选择“否”
8、可以发现,新建立的零部件的坐标系的位置和装配体的世界
坐标系是重合的
9、激活(或不激活)球体零部件的“PART”按钮,以便可以选择
其中的零部件几何体来进行复制
10、再激活刚才新建立的在组建坐标系下的零部件的“PART”,并在其“零部件几何体”处单击鼠标右键,选择“特殊粘贴”
11、选择“作为结果”来进行粘贴
12、隐藏原来的球体文件,并选中在
新建立的零部件中的粘贴的“几何体”及其坐标系,可以发现,现在这个零件中,不仅球体处在正确的装配位置,且其零部件的坐标系与组件的坐标系重合,也即,若直接在PRODUCT中载入新建之PART1文件,其可自动放
置在正确的位置上。