行星齿轮机构的设计与计算
- 格式:ppt
- 大小:2.56 MB
- 文档页数:23
⾏星齿轮减速器-课程设计计算说明书⽬录设计任务书: (2)设计内容: (3)⼀、评述传动⽅案 (3)⼆、电动机的选择及动⼒参数计算 (4)三、传动零件的校核计算 (6)⼀)外啮合齿轮传动 (6)⼆)内啮合齿轮传动 (9)四、轴的设计 (11)⼀)减速器输⼊轴Ⅰ (11)⼆)⾏星轮轴Ⅱ (17)三)内齿轮轴Ⅲ (20)五、键连接的选择和计算 (23)六、滚动轴承的选择和计算 (25)七、联轴器的选择 (28)⼋、齿侧间隙 (28)九、轴Ⅱ加⼯⼯艺图 (29)⼗、参考资料 (30)设计任务书:设计内容:⼀、评述传动⽅案牵引速度为 1.5/v m s =,滚筒直径400D mm =,可求出滚筒转速(601000)/w n v =??()(60100 1.5)/(400)71.62/min D r ππ==,由于⼯作情况为:室外,环境有灰尘,最⾼温度40℃,两班制,间歇双向运转,反向空转,断续周期⼯作制(S3),负荷持续率FC=56%,载荷有冲击,故应选YZR 系列电动机为原动机,它的转速约为750~1000r/min ,传动装置速⽐应为/(750~1000)/71.6210.47~13.96m w i n n ===可选如下图1-1、1-2两种⽅案:图1-1⽅案a 采⽤NW 分流式⾏星齿轮传动,卷扬机⼯作时制动器10制动,此时电动机1通过联轴器2驱动⾏星齿轮减速器,⾏星架上的滚筒5使钢丝绳7运动,从⽽牵引重物移动。
不需重物移动时,制动器6制动,制动器10松开,这时⾏星传动变成定轴传动,电动机和⼆级同轴式减速器空转,不⽤频繁地起动和制动电动机。
滚筒⽤滑动轴承⽀撑在机架上。
传动⽐:5~25i =,可满⾜传动要求。
优点:外形尺⼨⼩(减速器内置),电动机不⽤频繁启动适合狭窄⼯况下⼯作。
缺点:结构复杂,加⼯安装精度⾼,成本⼤,不易维修。
图1-2⽅案b 采⽤⼀级带传动和⼀级闭式齿轮传动,电动机带动带传动,齿轮传动,从⽽带动滚筒运动。
1 绪论行星齿轮传动与普通定轴齿轮传动相比较,具有质量小、体积小、传动比大、承载能力大以及传动平稳和传动效率高等优点,这些已被我国越来越多的机械工程技术人员所了解和重视。
由于在各种类型的行星齿轮传动中均有效的利用了功率分流性和输入、输出的同轴性以及合理地采用了内啮合,才使得其具有了上述的许多独特的优点。
行星齿轮传动不仅适用于高速、大功率而且可用于低速、大转矩的机械传动装置上。
它可以用作减速、增速和变速传动,运动的合成和分解,以及其特殊的应用中;这些功用对于现代机械传动发展有着重要意义。
因此,行星齿轮传动在起重运输、工程机械、冶金矿山、石油化工、建筑机械、轻工纺织、医疗器械、仪器仪表、汽车、船舶、兵器、和航空航天等工业部门均获得了广泛的应用[1-2]。
1.1 发展概况世界上一些工业发达国家,如日本、德国、英国、美国和俄罗斯等,对行星齿轮传动的应用、生产和研究都十分重视,在结构优化、传动性能,传动功率、转矩和速度等方面均处于领先地位,并出现一些新型的行星传动技术,如封闭行星齿轮传动、行星齿轮变速传动和微型行星齿轮传动等早已在现代化的机械传动设备中获得了成功的应用。
行星齿轮传动在我国已有了许多年的发展史,很早就有了应用。
然而,自20世纪60年代以来,我国才开始对行星齿轮传动进行了较深入、系统的研究和试制工作。
无论是在设计理论方面,还是在试制和应用实践方面,均取得了较大的成就,并获得了许多的研究成果。
近20多年来,尤其是我国改革开放以来,随着我国科学技术水平的进步和发展,我国已从世界上许多工业发达国家引进了大量先进的机械设备和技术,经过我国机械科技人员不断积极的吸收和消化,与时俱进,开拓创新地努力奋进,使我国的行星传动技术有了迅速的发展[1-8]。
1.2 3K型行星齿轮传动在图4所示的3K型行星齿轮传动中,其基本构件是三个中心轮a、b和e,故其传动类型代号为3K[10]。
在3K型行星传动中,由于其转臂H不承受外力矩的作用,所以,它不是基本构件,而只是用于支承行星轮心轴所必需的结构元件,因而,该转臂H又可称为行星轮支架(简称为行星架)。
行星齿轮机构的设计与计算行星齿轮机构是一种广泛应用于机械传动系统中的重要装置,其可以实现高速度、高传动比和高扭矩的传动效果,被广泛应用于工业领域。
本文将从行星齿轮机构的结构设计、传动计算和性能评价三个方面,对其进行详细叙述。
一、行星齿轮机构的结构设计行星齿轮机构包括太阳轮、行星轮、内齿圈和行星架等组成。
在进行结构设计时,需要根据传动比、扭矩和转速等要求,选取合适的节数及行星齿轮的参数,并确定合适的齿轮副布置。
在选择节数时,应根据所需的传动比和运动稳定性等因素进行综合考虑。
齿轮副布置可以选择封闭式和开放式两种形式,封闭式结构更为紧凑,但加工和安装难度较大。
而开放式结构则相对较为简洁,方便维护和安装。
二、行星齿轮机构的传动计算1.传动比计算传动比=(Zs+Zr)/Zs其中,Zs表示太阳齿轮的齿数,Zr表示行星轮的齿数。
2.齿轮尺寸计算齿轮尺寸计算主要包括齿轮副模数的选择和齿面强度的计算。
在选择齿轮副模数时,需要根据预计的工作载荷和制造工艺等因素进行综合考虑。
齿面强度的计算可以通过以下公式求解:齿面强度Ft=KF*KH*m*b*Y其中,KF为荷载系数,KH为接触系数,m为模数,b为齿轮宽度,Y 为齿轮材料影响系数。
三、行星齿轮机构的性能评价1.传动误差传动误差是指传动中实际传动比与理论传动比之间的差异。
传动误差主要由机构的制造误差和装配误差引起。
为了降低传动误差,可以采用精密加工和装配工艺,优化齿轮表面处理等措施。
2.传动效率传动效率是指输入功率与输出功率之间的比值,可以通过以下公式计算:传动效率η=(输出功率/输入功率)*100%传动效率的高低主要取决于齿轮的摩擦损失和变形损失。
为了提高传动效率,可以采用高精度的齿轮和适当的润滑措施。
3.寿命综上所述,行星齿轮机构的设计与计算需要根据传动要求对结构进行设计,并进行传动比和齿轮尺寸的计算。
在性能评价方面,需要关注传动误差、传动效率和寿命等因素,并采取相应的措施进行优化。
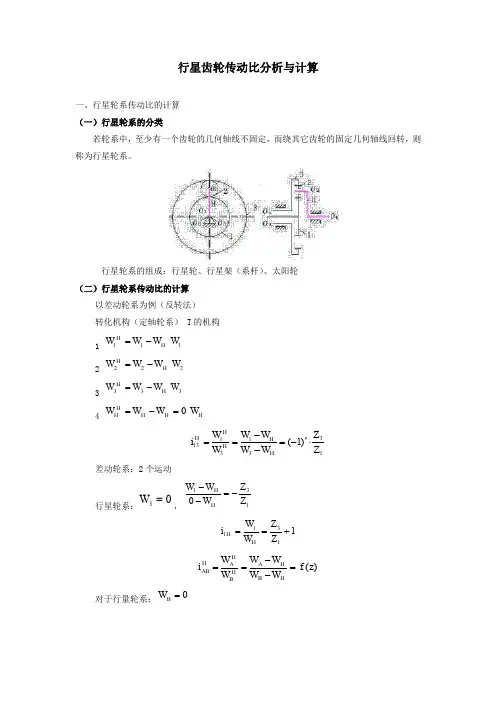
行星齿轮传动比分析与计算一、行星轮系传动比的计算 (一)行星轮系的分类若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。
行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算以差动轮系为例(反转法) 转化机构(定轴轮系) T 的机构1234差动轮系:2个运动行星轮系:,对于行量轮系:H H W W W -=111W H H W W W -=222W H H W W W -=333W 0=-=H H H H W W W H W 13313113)1(Z Z W W W W W W i H HH H H⋅'-=--==03=W 1310Z Z W W W H H-=--11311+==Z Z W W i H H )(z f W W W W W W iH B H A H BH A HAB=--==0=B W∴∴例12.2:图示为一大传动比的减速器,Z 1=100,Z 2=101,Z 2'=100,Z 3=99。
求:输入件H 对输出件1的传动比i H1解:1,3中心轮;2,2'行星轮;H 行星架 给整个机构(-W H )绕OO 轴转动∵W 3=0∴∴若Z 1=99行星轮系传动比是计算出来的,而不是判断出来的。
AHHA H H A H AB i W WW W W i -=-=--=110HAB AH i i -=1213223113)1('⋅⋅⋅-=--=Z Z Z Z W W W W i H HHH H Hi Z Z Z Z W W W 13213210'=--H H i Z Z Z Z W W 13213211'=+-HH i i 131100100991011⨯⨯-=100001001009910111111=⨯⨯-==HH i i 1001-=H i(三)复合轮系传动比的计算复合轮系:轮系中既含有定轴轮系又含有行星轮系,或是包含由几个基本行星轮系的复合轮系。
徐 毅,杨荣强(荆楚理工学院机械工程学院,湖北 荆门 448000)摘 要:文章介绍了行星齿轮机构的机构特点及工作原理,以及其在工业和生产生活中的应用,以太阳轮和全部行星轮的齿数模数作为计算的结果与要求,传动比、输入功率及输入输出转速作为约束条件,建立了行星齿轮传动设计的数学模型,为相关研究人员在实际的应用中合理计算确定行星齿轮的各个技术参数提供帮助。
关键词:行星齿轮机构;应用;计算中图分类号:TH132.41 文献标志码:A 文章编号:1672-3872(2019)10-0213-01——————————————作者简介: 徐毅(1996—),男,浙江衢州人,本科,研究方向:机械设计制造及其自动化。
机械上常把差动轮系和行星轮系的齿轮传动机构统称为行星齿轮传动,差动机构是指有两个以上自由度的机构,需给定两个以上输入运动,才能有较为稳定的运动输出效果[1]。
其常用于天文仪器、轿车、卡车、起重机等各类机械中,实现增力效果、分解或合成、误差补偿及实现任意轨迹等目的。
行星齿轮变速器因其具有结构简单紧凑、传动效率优秀等特点被广泛应用。
行星传动设计是一个复杂的问题,其体积重量和承载能力主要取决于传输参数的选择和计算机辅助设计优化[2]。
通过优化齿轮参数,来降低重量、减小零件尺寸,同时提升承载能力。
1 2K-H 行星齿轮机的特点与应用2K-H 行星齿轮机因其体积小、重量轻、传动效率高等优点,型行星齿轮机构简图如图1所示。
行星齿轮机构应用在汽车工业中应用最广,汽车正常驾驶时,发动机的转速一般在1800~3100r/min,齿轮的传动比与两齿间距呈正比,齿轮的传动比越大,两个齿轮之间半径越大,箱体尺寸越大。
德国大众汽车的某车型发动机排量标准为1500mL,最大扭矩转速1200r,最大马力为150Ps,最大功率110kW,最大扭矩250N·m,最大功率转速5300r/min,要求其行星齿轮减速器的使用寿命高于10年。
行星齿轮机构传动比计算方法Key words: epicyclic gear train; speed ratio; compute way.随着行星齿轮减速器以及行星齿轮传动在变速箱中的广泛应用,对行星齿轮传动的了解和掌握已成为工程技术人员的必要技能。
但是,对于刚接触行星齿轮传动的工程技术人员来说,行星齿轮传动的速比计算比较不容易理解和掌握。
本文通过对各类参考资料及教科书中的行星齿轮传动速比计算方法进行总结归纳,并针对常用的最具代表性的2K-H型行星齿轮传动,分别用不同方法对其传动特性方程进行了推导论证。
行星齿轮传动或称周转轮系。
根据《机械原理》[1]上的定义,我们可把周转轮系分为差动轮系和行星轮系。
为理解方便,本论文所讨论限于2K-H型周转轮系。
关于行星齿轮传动(周转轮系)的速比计算方法,归纳起来有两大类四种方法,分别为由行星架固定法和力矩法组成的分析法;由速度图解法和矢量法组成的图解法[2]。
矢量图解法一般适用于圆锥齿轮组成的行星齿轮传动,在此不作介绍;下面分别运用其它三种计算方法对2K-H型周转轮系的传动特性方程(1)进行推导。
1-太阳轮 2-行星轮 3-内齿圈 H -行星架 图1 行星齿轮传动Fig 1 Epicyclic gear train0)1(31=++-αωωαωH (1) 结合图1,式中1ω为太阳轮1的转速、Hω为行星架H 转速、3ω为内齿圈3转速、α为内齿圈3与太阳轮1的齿数比即13Z Z =α。
1 行星架固定法机械专业教科书上一般介绍的都是此种方法,也可叫转化机构法。
其理论是一位名叫Wlies 的科学家于1841年提出的,即“一个机构整体的绝对运动并不影响其内部各构件间的相对运动” [3],就像手表的时针、分针、秒针的相对运动不会因带表人的行动而变化。
如图2所示,其中太阳轮1、行星轮2、内齿圈3、行星架H 的转速分别为Hωωωω、、、321。
我们假定整个行星轮系放在一个绕支点O 旋转的圆盘上,此圆盘的转速为 H ω-。
行星齿轮齿比计算行星齿轮齿比是指行星齿轮传动中太阳轮、行星轮和内齿圈之间的齿数比值。
它在机械传动中起着重要的作用,决定了传动的速比和扭矩分配。
下面将从行星齿轮齿比的定义、计算公式、应用以及优缺点等方面进行阐述。
一、行星齿轮齿比的定义行星齿轮传动是一种复杂的机械传动形式,由太阳轮、行星轮和内齿圈组成。
其中,太阳轮位于中间,行星轮围绕太阳轮旋转,内齿圈固定不动。
行星齿轮齿比就是指太阳轮和内齿圈之间的齿数比值,用来描述行星齿轮传动的速比。
二、行星齿轮齿比的计算行星齿轮齿比的计算可以通过以下公式得到:齿比 = (太阳轮齿数 + 内齿圈齿数)/ 太阳轮齿数三、行星齿轮齿比的应用行星齿轮传动由于其结构紧凑、传动效率高等特点,在工业生产中得到了广泛应用。
它常用于汽车变速器、风力发电机、机床等领域。
其中,汽车变速器是行星齿轮传动最常见的应用之一。
通过调整行星齿轮齿比,可以实现不同的速比,从而满足不同速度和扭矩要求。
四、行星齿轮齿比的优缺点行星齿轮传动具有以下优点:1. 结构紧凑,体积小,重量轻,承载能力强;2. 传动效率高,能够实现高速比传动;3. 扭矩分配均匀,能够平稳传动;4. 可以实现多级传动,提高传动比。
然而,行星齿轮传动也存在一些缺点:1. 制造和安装难度较大,加工精度要求高;2. 齿轮接触应力大,耐久性较差;3. 成本较高。
行星齿轮齿比作为行星齿轮传动中的重要参数,对传动性能和应用范围有着重要影响。
通过合理选择和设计行星齿轮齿比,可以满足不同的传动要求。
在实际应用中,需要根据具体情况进行齿轮参数的选择,以实现最佳的传动效果。
行星排配齿要求行星变速箱齿轮传动基本参数为齿轮模数m和齿圈节元直径Dr,设计时一般用统计和类比的方法确定。
为提高制造工艺性,变速箱行星齿轮传动部分所有齿轮采用同一模数,对于各行星排承受载荷的差异,则通过改变齿轮宽度来调整,以满足强度的要求。
行星动力换挡变速箱的配齿条件:(1)、同心条件为使太阳轮和齿圈旋转轴线重合,行星轮与太阳轮的中心距必须和行星轮和齿圈的中心距相等。
即保证:(2)、装配条件为使行星排各构件所受径向力平衡,各行星轮应均匀分布。
为此,各齿轮与行星轮个数q必须满足装配条件,否则,当第一个行星轮装入啮合位置后,其它几个齿轮装不进去,为此建立装配条件:其中,q和N都是整数,q为行星轮的个数。
所以可以将和之和分解因数,取其一个适当的因数为q。
(3)、相邻条件适当增加行星轮个数可以减小行星排传动时的齿间负荷,但如果行星轮个数太多,将会使得相邻行星齿轮的轮齿相互干涉。
因此,设计行星排时必须保证相邻行星轮齿顶间有一定间隙,现有结构中t至少为1到2。
当行星轮数时,一般间隙都足够;且时,一般。
此外都应用下式检验t值:式中为行星轮与太阳轮的中心距,为行星轮齿顶圆直径,。
行星排配齿结果对于本变速箱设计方案,其行星排的特征参数及配齿如下:(模数均为6)表9 各行星排齿数该配齿方案满足传动比条件、同心条件和装配条件。
各齿轮几何尺寸计算所用均为标准圆柱齿轮,模数,啮合角表10 行星排各齿轮参数171 1.638 四排太阳轮33 198 186.06 210 183 13.5相关计算公式:顶隙系数:齿顶高系数:分度圆直径:;基圆直径:;齿顶圆直径:外啮合:内啮合:;齿根圆直径:外啮合:内啮合:;全齿高:;齿根高:;齿顶高:外啮合内啮合:;中心距:齿顶圆压力角:重合度:。
第三章 行星排配齿及各齿轮设计计算§3.1 行星排配齿要求行星变速箱齿轮传动基本参数为齿轮模数m 和齿圈节元直径Dr ,设计时一般用统计和类比的方法确定。
为提高制造工艺性,变速箱行星齿轮传动部分所有齿轮采用同一模数,对于各行星排承受载荷的差异,则通过改变齿轮宽度来调整,以满足强度的要求。
行星动力换挡变速箱的配齿条件:(1)、同心条件为使太阳轮和齿圈旋转轴线重合,行星轮与太阳轮的中心距必须和行星轮和齿圈的中心距相等。
即保证:2s pZ Z -=r Z(2)、装配条件为使行星排各构件所受径向力平衡,各行星轮应均匀分布。
为此,各齿轮与行星轮个数q 必须满足装配条件,否则,当第一个行星轮装入啮合位置后,其它几个齿轮装不进去,为此建立装配条件:r s Z Z qN +=其中,q 和N 都是整数,q 为行星轮的个数。
所以可以将r Z 和s Z 之和分解因数,取其一个适当的因数为q 。
(3)、相邻条件适当增加行星轮个数可以减小行星排传动时的齿间负荷,但如果行星轮个数太多,将会使得相邻行星齿轮的轮齿相互干涉。
因此,设计行星排时必须保证相邻行星轮齿顶间有一定间隙 T tm =,现有结构中t 至少为1到2。
当行星轮数3q =时,一般间隙都足够;4q =且 4.5k <时,一般1t >。
此外都应用下式检验t 值:2sin2cep A D tmθ⨯=+式中A 为行星轮与太阳轮的中心距,ep D为行星轮齿顶圆直径,360/c q θ=。
§3.2 行星排配齿结果对于本变速箱设计方案,其行星排的特征参数及配齿如下:(模数均为6)该配齿方案满足传动比条件、同心条件和装配条件。
§3.3 各齿轮几何尺寸计算所用均为标准圆柱齿轮,模数6m =,啮合角20α︒=相关计算公式: 顶隙系数:0.25c *= 齿顶高系数: 1ah *=分度圆直径:d mz =; 基圆直径:cos b d d α=;齿顶圆直径:外啮合 :2a a d d h =+内啮合 :1112(2)a a a d d h z h m *=+=+222a a a d d h m d *=-+215.1a m d z = ;齿根圆直径:外啮合 :2(22)ff ad d h z h c m **=-=--内啮合 :222()f a d d h c m **=++ ;全齿高: a fh h h =+; 齿根高:1.25f h m=;齿顶高:外啮合12a a h h m ==内啮合:1a h m = ; 22(17.6/)a h z m =-中心距:()2112a m z z =±齿顶圆压力角:1cosba ad d α-= 重合度:()()11221tan tan tan tan 2a a z a z a εααπ=-±-⎡⎤⎣⎦。
行星架当量齿轮的计算概述说明以及解释1. 引言1.1 概述本篇长文的主题是行星架当量齿轮的计算。
在现代机械工程中,行星架当量齿轮作为传动装置中的关键部件,具有重要的作用。
它能够有效地转换和传递动力,同时还可以提高传动系统的性能和效率。
1.2 文章结构本文共分为五个部分:引言、行星架当量齿轮的计算、行星架当量齿轮的概述说明、行星架当量齿轮的解释以及结论。
通过对这五个部分内容的详细阐述,旨在全面介绍行星架当量齿轮的计算方法、重要性、工作原理以及优化设计等方面内容。
1.3 目的编写该篇文章的目的是为读者提供一个全面而清晰地了解行星架当量齿轮计算相关知识的参考资料。
通过深入探讨其定义与组成部分、重要性以及与传动效率之间的关系,希望能够使读者对这一领域有更深入的理解。
此外,文章还致力于解释常见行星架结构和工作原理,并详细说明当量齿轮对传动系统性能的影响,以及优化设计和选型考虑因素等方面问题。
最后,结论部分将总结行星架当量齿轮计算的重点和难点问题,并展望其未来发展和应用前景。
以上就是引言部分的详细内容,通过概述、文章结构和目的三个方面来清晰地介绍了本篇长文的主题和编写目标。
2. 行星架当量齿轮的计算2.1 什么是行星架当量齿轮行星架当量齿轮是指在行星传动系统中,将多个部分组成的实际齿轮转化为一个等效的大齿轮,从而简化了传动系统的分析和设计。
它起到了增强传动效率、减小体积和噪声的作用。
2.2 当量齿轮的重要性当量齿轮在行星传动系统中扮演着关键角色。
通过将各个部分组成的实际齿轮转化为一个等效的大齿轮,不仅可以简化传动系统模型,还能够有效提高传动效率,并减小整体尺寸和重量。
当量齿轮的正确计算对于行星传动系统的设计和优化至关重要。
2.3 当量齿轮的计算方法计算行星架当量齿轮需要考虑以下几个因素:1. 需求参数:首先需要明确传动系统所需的输出转速、扭矩以及输入功率等参数。
2. 配置选择:根据具体情况选择合适的行星架配置。