行星齿轮设计【模板】
- 格式:doc
- 大小:1.36 MB
- 文档页数:15
1设计任务电动轮行星齿轮减速器主要包含太阳轮、行星齿轮、行星架、行星轴等关键零件,试进行行星齿轮减速器的零件三维建模设计及装配。
主要参数如表1所示。
图1—图5为参考图。
表1中没有列出的其他参数自行设计确定。
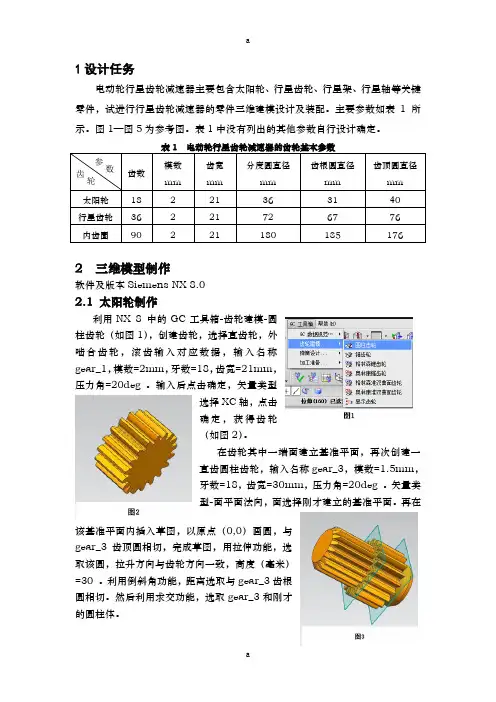
表1 电动轮行星齿轮减速器的齿轮基本参数齿数 模数 mm 齿宽 mm 分度圆直径mm 齿根圆直径mm 齿顶圆直径mm 太阳轮 18 2 21 36 31 40 行星齿轮 36 2 21 72 67 76 内齿圈902211801851762 三维模型制作软件及版本Siemens NX 8.02.1 太阳轮制作利用NX 8 中的GC 工具箱-齿轮建模-圆柱齿轮(如图1),创建齿轮,选择直齿轮,外啮合齿轮,滚齿输入对应数据,输入名称gear_1,模数=2mm ,牙数=18,齿宽=21mm ,压力角=20deg 。
输入后点击确定,矢量类型选择XC 轴,点击确定,获得齿轮(如图2)。
在齿轮其中一端面建立基准平面,再次创建一直齿圆柱齿轮,输入名称gear_3,模数=1.5mm ,牙数=18,齿宽=30mm ,压力角=20deg 。
矢量类型-面平面法向,面选择刚才建立的基准平面。
再在该基准平面内插入草图,以原点(0,0)画圆,与gear_3齿顶圆相切,完成草图,用拉伸功能,选取该圆,拉升方向与齿轮方向一致,高度(毫米)=30 。
利用倒斜角功能,距离选取与gear_3齿根圆相切。
然后利用求交功能,选取gear_3和刚才的圆柱体。
参 数齿 轮在gear_1另一端面建立基准平面,拉伸一个直径(mm)=30,高度(mm)=10的圆柱体,选择倒斜角,距离=3mm,角度=30deg。
得到模型(如图3)。
2.2 行星轮制作如2.1中制作齿轮,创建直齿圆柱齿轮gear_2,模数=2mm,牙数=36,齿宽=21mm,压力角=20deg,矢量类型-两点,随机放置。
其他两个行星齿轮分别为gear_4,gear_5,同样随机放置。
微型行星齿轮传动设计概述微型行星齿轮传动是一种常用于微型机械设备的传动方式,它具有结构紧凑、传递功率大、精度高等特点,被广泛应用于机器人、摄像头等领域。
本文将介绍微型行星齿轮传动的设计原理、结构以及设计要点。
设计原理微型行星齿轮传动采用了星轮、行星轮和太阳轮三个主要组成部分,其中太阳轮为中心轴固定,星轮和行星轮通过齿轮来连接。
太阳轮和行星轮的齿轮分别嵌入星轮内部,通过齿轮的啮合来完成传动。
传动的原理可以简单描述为:1.太阳轮固定,星轮绕太阳轮运动。
2.行星轮位于星轮内部,通过行星轮和齿轮与星轮啮合。
3.行星轮的运动产生旋转力,使星轮绕太阳轮运动。
这种传动方式能够实现高速比,提供较大的扭矩输出,并且具有噪音小、寿命长的优点。
微型行星齿轮传动的结构设计包括星轮、行星轮、太阳轮的尺寸计算以及齿轮的齿型设计等。
星轮和行星轮星轮和行星轮一般采用同样的齿数,可以通过下述公式来计算它们的最佳齿数:Z = 6n + 1其中,Z为齿数,n为正整数。
这样的设计能够使得星轮和行星轮的啮合齿数更均匀,减少侧向力,提高传动效率。
太阳轮太阳轮的齿数可以通过下述公式计算:Z = 3Z1 + 1其中,Z为太阳轮的齿数,Z1为星轮和行星轮的齿数。
太阳轮的设计要考虑到承载能力和传动效率的平衡,通常选择钢材作为材料。
齿轮齿型设计齿轮的齿型设计对于传动的平稳性和传动效率具有重要影响。
常用的齿轮齿型包括直齿、斜齿和弧齿等,其中斜齿的设计能够减小齿轮的噪音和震动。
在进行微型行星齿轮传动的设计时,需要注意以下要点:1.确定传动比。
根据设备的需求和工作条件,选择合适的传动比,以满足输出扭矩和速度的要求。
2.进行载荷分析。
根据传动的工作条件和使用环境,进行载荷分析,确定传动部件的尺寸和材料。
3.进行强度校核。
通过应力分析和强度校核,确保传动部件能够承受正常工作时的载荷。
4.选择适当的润滑方式。
微型行星齿轮传动需要进行充分的润滑,以减小摩擦和磨损,提高传动效率和寿命。
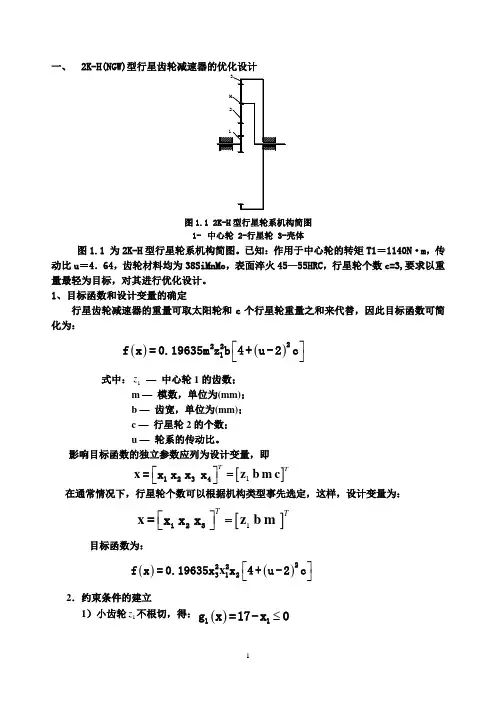
图1.1 为2K-H 型行星轮系机构简图。
已知:作用于中心轮的转矩T1=1140N ·m ,传动比u =4.64,齿轮材料均为38SiMnMo ,表面淬火45—55HRC ,行星轮个数c=3,要求以重量最轻为目标,对其进行优化设计。
1、目标函数和设计变量的确定行星齿轮减速器的重量可取太阳轮和c 个行星轮重量之和来代替,因此目标函数可简化为:()()⎡⎤⎣⎦2221f x =0.19635m z b 4+u -2c式中:1z — 中心轮1的齿数;m — 模数,单位为(mm); b — 齿宽,单位为(mm);c — 行星轮2的个数; u — 轮系的传动比。
影响目标函数的独立参数应列为设计变量,即[]1TT⎡⎤=⎣⎦x z b m c 1234=x x x x在通常情况下,行星轮个数可以根据机构类型事先选定,这样,设计变量为:[]1TT⎡⎤=⎣⎦x z b m123=x x x目标函数为:()()⎡⎤⎣⎦x 222312f x =0.19635x x 4+u -2c 2.约束条件的建立1)小齿轮1z 不根切,得:()≤11gx =17-x 02)限制齿宽最小值,得:()≤22g x =10-x 03)限制模数最小值,得:()-≤33gx =2x 04)限制齿宽系数b/m 的范围:≤≤5b/m 17,得:()-≤432g x =5x x 0()17-≤523g x =x x 05)满足接触强度要求,得:()[]H σ-≤612g x =750937.3/(x x 0式中:[]H σ — 许用接触应力。
6)满足弯曲强度要求,得:())[]F σ-≤27F S 123g x =1482000y y /(x x x 0式中:F y 、Sy — 齿轮的齿形系数和应力校正系数;[]F σ — 许用弯曲应力。
,案。
1.目标函数和设计变量在大批量生产压力容器时,以螺栓总成本最小作为追求的设计目标很有意义,一台压力容器的螺栓总成本W n取决于螺栓的个数n和单价W,即W n=n WW=0.0205d-0.1518于是,可对这种螺栓组写出如下目标函数f(x)=n(0.0205d-0.1518)显然,可取设计变量为X=[x1,x2]T=[d,n]T则目标函数f(x)= x2 (0.0205 x1-0.1518)2.约束函数设计压力容器螺栓组时,螺栓数量的确定既要考虑密封性要求,又要兼顾装拆工具的工作空间。

1引言行星齿轮传动在我国已有了许多年的发展史,很早就有了应用。
然而,自20 世纪60年代以来,我国才开始对行星齿轮传动进行了较深入、系统的研究和试制工作。
无论是在设计理论方面,还是在试制和应用实践方面,均取得了较大的成就, 并获得了许多的研究成果。
近20 多年来,尤其是我国改革开放以来,随着我国科学技术水平的进步和发展,我国已从世界上许多工业发达国家引进了大量先进的机械设备和技术,经过我国机械科技人员不断积极的吸收和消化,与时俱进,开拓创新地努力奋进,使我国的行星传动技术有了迅速的发展[1]。
2设计背景试为某水泥机械装置设计所需配用的行星齿轮减速器,已知该行星齿轮减速器的要求输入功率为p1740KW ,输入转速n1 1000rpm , 传动比为i p 35.5, 允许传动比偏差iP0.1, 每天要求工作16小时,要求寿命为2 年;且要求该行星齿轮减速器传动结构紧凑,外廓尺寸较小和传动效率高。
3设计计算3.1选取行星齿轮减速器的传动类型和传动简图根据上述设计要求可知,该行星齿轮减速器传递功率高、传动比较大、工作环境恶劣等特点。
故采用双级行星齿轮传动。
2X-A 型结构简单,制造方便,适用于任何工况下的大小功率的传动。
选用由两个2X-A 型行星齿轮传动串联而成的双级行星齿轮减速器较为合理,名义传动比可分为i p1 7.1, i p2 5进行传动。
传动简图如图1所示:图13.2 配齿计算根据 2X-A 型行星齿轮传动比 i p 的值和按其配齿计算公式,可得第一级传动的内 齿轮 b1, 行星齿轮 c1 的齿数。
现考虑到该行星齿轮传动的外廓尺寸,故选取第一级中 心齿轮 a1数为 17 和行星齿轮数为 np 3 。
根据内齿轮 z b1 i p1 1 z a1zb17.1 1 17 103.7 103对内齿轮齿数进行圆整后,此时实际的 P 值与给定的 P 值稍有变化,但是必须控 制在其传动比误差范围内。
实际传动比为i = 1+ za 1 =7.0588zb 1其传动比误差 i = ip i= 7.1 7.0588 =5℅ip 7.1根据同心条件可求得行星齿轮 c1 的齿数为所求得的 ZC1适用于非变位或高度变位的行星齿轮传动。
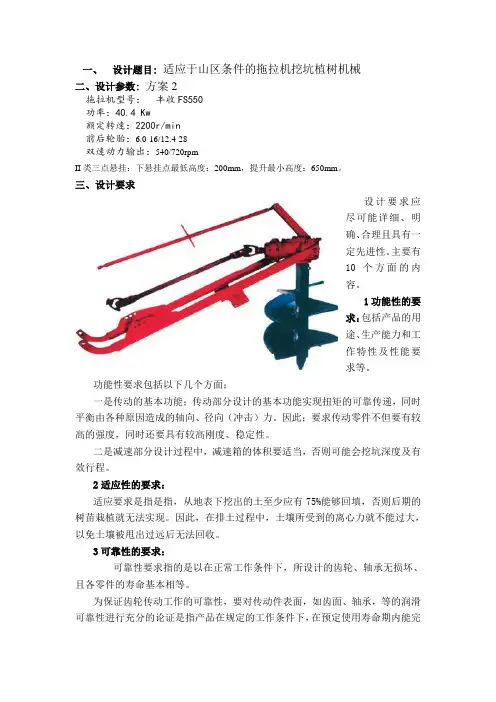
一、设计题目: 适应于山区条件的拖拉机挖坑植树机械二、设计参数: 方案2拖拉机型号:丰收FS550功率:40.4 Kw额定转速:2200r/min前后轮胎:6.0-16/12.4-28双速动力输出:540/720rpmII类三点悬挂:下悬挂点最低高度:200mm,提升最小高度:650mm。
三、设计要求设计要求应尽可能详细、明确、合理且具有一定先进性。
主要有10个方面的内容。
1功能性的要求:包括产品的用途、生产能力和工作特性及性能要求等。
功能性要求包括以下几个方面;一是传动的基本功能;传动部分设计的基本功能实现扭矩的可靠传递,同时平衡由各种原因造成的轴向、径向(冲击)力。
因此;要求传动零件不但要有较高的强度,同时还要具有较高刚度、稳定性。
二是减速部分设计过程中,减速箱的体积要适当,否则可能会挖坑深度及有效行程。
2适应性的要求:适应要求是指是指,从地表下挖出的土至少应有75%能够回填,否则后期的树苗栽植就无法实现。
因此,在排土过程中,土壤所受到的离心力就不能过大,以免土壤被甩出过远后无法回收。
3可靠性的要求:可靠性要求指的是以在正常工作条件下,所设计的齿轮、轴承无损坏、且各零件的寿命基本相等。
为保证齿轮传动工作的可靠性,要对传动件表面,如齿面、轴承,等的润滑可靠性进行充分的论证是指产品在规定的工作条件下,在预定使用寿命期内能完成规定功能的概率。
4寿命的要求:是产品正常使用时因磨损而使性能下降在允许范围内而且无需大修的连续工作期限。
因各零部件难以设计成相等寿命,所以易磨损件的寿命应尽量设计成倍数关系。
寿命要求所设计的零件寿命基本相等,各关键支承表面工作可靠。
5效率的要求:即产品工作时输出的量与输入的量之比。
6经济的要求:包括制造成本和使用的经济性。
机械产品的制造成本构成中材料费占有很大的比重,设计时必须给予充分注意。
使用的经济性是指产品在单位时间内生产的价值与耗费价值之间的差。
7人-机工程学的要求:人-机工程学也称为技术美学,包括操作方便宜人,调节省力有效,照明适度,显示清晰,造型美观,色彩和谐,维护保养容易等。

第二章 原始数据及系统组成框图(一)有关原始数据课题: 一种行星轮系减速器的设计 原始数据及工作条件: 使用地点:减速离合器内部减速装置;传动比:p i =5.2 输入转速:n=2600r/min 输入功率:P=150w 行星轮个数:w n =3 内齿圈齿数b z =63第五章 行星齿轮传动设计(一)行星齿轮传动的传动比和效率计算行星齿轮传动比符号及角标含义为: 123i 1—固定件、2—主动件、3—从动件1、齿轮b 固定时(图1—1),2K —H (NGW )型传动的传动比baH i 为 b aH i =1-Hab i =1+b z /a z可得 Hab i =1-b aH i =1-p i =1-5.2=-4.2 a z =b z /b aH i -1=63*5/21=15输出转速:H n =a n /p i =n/p i =2600/5.2=500r/min 2、行星齿轮传动的效率计算:η=1-|a n -H n /(Hab i -1)* H n |*HψH ψ=*H H Ha b B ψψψ+H a ψ为a —g 啮合的损失系数,H b ψ为b —g 啮合的损失系数,HBψ为轴承的损失系数,H ψ 为总的损失系数,一般取H ψ=0.025按a n =2600 r/min 、H n =500r/min 、Hab i =-21/5可得η=1-|a n -H n /(H ab i -1)* H n |*Hψ=1-|2600-500/(-4.2-1)*500|*0.025=97.98%(二) 行星齿轮传动的配齿计算1、传动比的要求——传动比条件即 baH i =1+b z /a z可得 1+b z /a z =63/5=21/5=4.2 =b aH i所以中心轮a 和内齿轮b 的齿数满足给定传动比的要求。
2、保证中心轮、内齿轮和行星架轴线重合——同轴条件为保证行星轮g z 与两个中心轮a z 、b z 同时正确啮合,要求外啮合齿轮a —g 的中心距等于内啮合齿轮b —g 的中心距,即w (a )a g - =()w b g a -称为同轴条件。
1 绪论行星齿轮传动与普通定轴齿轮传动相比较,具有质量小、体积小、传动比大、承载能力大以及传动平稳和传动效率高等优点,这些已被我国越来越多的机械工程技术人员所了解和重视。
由于在各种类型的行星齿轮传动中均有效的利用了功率分流性和输入、输出的同轴性以及合理地采用了内啮合,才使得其具有了上述的许多独特的优点。
行星齿轮传动不仅适用于高速、大功率而且可用于低速、大转矩的机械传动装置上。
它可以用作减速、增速和变速传动,运动的合成和分解,以及其特殊的应用中;这些功用对于现代机械传动发展有着重要意义。
因此,行星齿轮传动在起重运输、工程机械、冶金矿山、石油化工、建筑机械、轻工纺织、医疗器械、仪器仪表、汽车、船舶、兵器、和航空航天等工业部门均获得了广泛的应用[1-2]。
全套图纸加1538937061.1 发展概况世界上一些工业发达国家,如日本、德国、英国、美国和俄罗斯等,对行星齿轮传动的应用、生产和研究都十分重视,在结构优化、传动性能,传动功率、转矩和速度等方面均处于领先地位,并出现一些新型的行星传动技术,如封闭行星齿轮传动、行星齿轮变速传动和微型行星齿轮传动等早已在现代化的机械传动设备中获得了成功的应用。
行星齿轮传动在我国已有了许多年的发展史,很早就有了应用。
然而,自20世纪60年代以来,我国才开始对行星齿轮传动进行了较深入、系统的研究和试制工作。
无论是在设计理论方面,还是在试制和应用实践方面,均取得了较大的成就,并获得了许多的研究成果。
近20多年来,尤其是我国改革开放以来,随着我国科学技术水平的进步和发展,我国已从世界上许多工业发达国家引进了大量先进的机械设备和技术,经过我国机械科技人员不断积极的吸收和消化,与时俱进,开拓创新地努力奋进,使我国的行星传动技术有了迅速的发展[1-8]。
1.2 3K型行星齿轮传动在图4所示的3K型行星齿轮传动中,其基本构件是三个中心轮a、b和e,故其传动类型代号为3K[10]。
在3K型行星传动中,由于其转臂H不承受外力矩的作用,所以,它不是基本构件,而只是用于支承行星轮心轴所必需的结构元件,因而,该转臂H又可称为行星轮支架(简称为行星架)。
2K-H行星齿轮减速器(传动系统设计)【摘要】行星齿轮变速器,是用行星齿轮机构实现变速的装置。
它通常装在液力变扭器的后面,共同组成液力自动变速器。
行星齿轮机构,有点好像太阳系。
它的中央是太阳轮,太阳轮的周围有几个围绕它旋转的行星轮,行星轮之间,有一个共用的行星架。
行星轮的外面,有一个大齿圈。
行星齿轮变速器,属于一种齿轮箱,它是由行星齿圈、太阳轮、行星轮(又称卫星轮)和齿轮轮轴组成,根据齿圈、太阳轮和行星轮的运动关系,可以实现输入轴与输出轴脱离刚性传动关系、输入轴与输出轴同向或反向传动和输。
本文通过对2K-H型变速器的传动结构、传动原理及行星齿轮传动的设计来计算一个2K-H型变速器。
2K-H型具有构件数量少,传动功率和传动比变化范大,设计容易等优点,因此应用最广泛。
论文首先介绍了行星变速器的定义,用途及功能。
并对国内外行星变速器的发展现状和发展前景作了分析。
通过设计和计算,完成对变速器相关结构的零件设计,整体设计,初步确定了行星变速器结构的总体设计。
【关键词】行星齿轮传动行星齿轮传动结构行星齿轮变速器【Abstract】Planetary gear transmission,is the use of planetary gear mechanism of variable-speed device。
It is usually mounted on the back of the torque converter, consisting of a hydraulic automatic transmission. Planetary gear mechanism, a bit like the solar system. It is the center of the sun wheel, a sun wheel around several of its planets wheel, planet wheel, there is a shared the planet carrier. Planet wheel on the outside, there is a large gear ring. Planetary gear transmission, which belongs to a gear box, which is composed of a planetary ring gear, a sun wheel, a planetary wheel ( also known as satellite wheel and gear wheel shaft ), according to the ring gear, the sun wheel and planetary wheel motor, can achieve the input shaft and the output shaft from the rigid transmission relations, the input shaft and the output shaft the same direction or in the reverse transmission and transmission.This article through to the 2K-H transmission, the transmission structure and transmission principle of planetary gear transmission design to calculate a2K-H type speed 2K-H行星. 2K-H has few members, transmission power and transmission ratio range, design is easy, therefore the most widely used. The paper firstly introduces the definition of planet transmission, use and function. To domestic and international planetary transmission development present situation and the prospect of development is analyzed. Through the design and calculation of transmission, associated structural parts design, overall design, preliminary and affirmatory planetary transmission structure overall design.【Key words】Planetary gear transmission,Planetary gear transmission structure ,Planetary gear transmission1 2k-h型变速器概述 (1)1.1 行星齿轮变速器的定义 (1)行星齿轮变速器的特点 (3)1.3 2K-H变速器的设计目的和工作原理 (9)1.4 行星齿轮变速器的设计目的 (12)1.5 2K-H减速器的工作原理 (14)2 2K-H行星齿轮减速器设计概要 (18)2.1 2K-H行星齿轮减速器概述 (18)2.2 2K-K行星齿轮减速器主要参数的确定 (18)2.3 2K-H行星齿轮减速器强度计算 (24)2.4 2K-H行星齿轮减速器结构设计 (26)3 2K-H行星齿轮减速器优化设计 (29)3.1 2K-H行星齿轮减速器优化设计原理 (29)3.2 优化数学模型 (31)3.3 配齿计算 (35)3.4 2K-H行星齿轮优化设计程序结构 (36)4行星齿轮的传动 (37)4.1 行星齿轮传动简介 (37)4.2 行星齿轮传动的特点 (39)行星齿轮传动的结构形式 (40)5 2K-H行星齿轮减速器传动设计 (42)5.1 设计要点 (42)5.2 行星齿轮减速器传动的传动比计算 (44)5.3 2K-H行星齿轮减速器的传动效率计算 (53)5.4 行星轮支架上的作用力 (55)5.5 减速器传动类型选择及折其原因 (57)6 2K-H行星齿轮减速器传动系统的设计 (57)6.1 传动系统的方案拟定 (57)6.2 传动比和效率的计算 (58)行星齿轮传动的配齿计算 (59)行星齿轮传动的几何尺寸和啮合参数计算 (61)行星齿轮传动强度计算及校核 (63)行星齿轮传动的受力分析 (67)行星齿轮传动的均载机构及浮动量 (69)轮间载荷分布均匀的措施 (69)轮材料及精度等级和齿面接触疲劳强度设计 (70)6.10 主要尺寸及圆周速度计算 (71)7 结论 (72)参考文献 (72)致谢 (73)1 绪论通常情况,应用最多的是内齿圈3固定、太阳轮1主动、行星架从动的传动装置。
所采用的减速机的原理图(即双输入对称2K-H )如上所示双联齿轮2-2’经中心齿轮K1的增速至750rpm ,中心齿轮K 1的输入转速n 1=500rpm ,系杆输出转速n H =15rpm ,而n 电到双行星轮的转速减速比一定,则i 电1’⨯i 12= i 电3’⨯i 32’,即i 32’=0.99,所以i 电1’=1500/742.5=2.02 , i 电3’=1500/500=3,i 12=2/3确定双联行星轮转速n 2及另一中心齿轮K 3的输入转速n 3如下:i 12 =n 1/n 2=-Z 2/Z 1 (1)i H 13=n H 1/n H 3=(n 1-n H )/(n 3-n H )=Z 2Z 3/Z 1Z 2’ (2)得:n H =(Z 1Z 2’n 1-Z 2Z 3n 3)/(Z 1Z 2’-Z 2Z 3) (3)设定中心齿轮K 1和系杆H 的转向相同,即n 1和n H 符号相同,代入数值有:i 12=500/n 2=-2/3,得:n 2=-750rpm带入(3)式中得到 n 3=742.5rpm≈ -n 2i 13=n 1/n 3= 500/742.5=0.673i 1H =n 1/n H =500/15=33.3i 3H =n 3/n H =742.5/15=49.5若设定中心齿轮K 1和系杆H 的转向相反,即n 1和n H 符号相反,代入数值有:i 12=500/n 2=-2/3,得:n 2=-750rpm带入(3)式中得到 n 3=772.5rpm≈ -n 2i 13=n 1/n 3= 500/772.5=0.664i 1H =n 1/n H =500/(-15)=-33.3i 3H =n 3/n H =772.5/(-15)=-51.5由以上选取中心齿轮K 1和系杆H 的转向相同,即n 1和n H 符号相同的方案计算可知n 3’=742.5rpm ,n 1’=500rpm而电机的转数n 电=1500rpm所以i 电3’=1500/742.5=2.02i 电1’=1500/500=3对于带传动的传动比,传动比大,会减小带轮的包角。
第二章 原始数据及系统组成框图(一)有关原始数据课题: 一种行星轮系减速器的设计 原始数据及工作条件: 使用地点:减速离合器内部减速装置;传动比:p i =5.2 输入转速:n=2600r/min 输入功率:P=150w 行星轮个数:w n =3 内齿圈齿数b z =63第五章 行星齿轮传动设计(一)行星齿轮传动的传动比和效率计算行星齿轮传动比符号及角标含义为: 123i 1—固定件、2—主动件、3—从动件1、齿轮b 固定时(图1—1),2K —H (NGW )型传动的传动比baH i 为 b aH i =1-Hab i =1+b z /a z可得 Hab i =1-b aH i =1-p i =1-5.2=-4.2 a z =b z /b aH i -1=63*5/21=15输出转速:H n =a n /p i =n/p i =2600/5.2=500r/min 2、行星齿轮传动的效率计算:η=1-|a n -H n /(Hab i -1)* H n |*HψH ψ=*H H Ha b B ψψψ+H a ψ为a —g 啮合的损失系数,H b ψ为b —g 啮合的损失系数,HBψ为轴承的损失系数,H ψ 为总的损失系数,一般取H ψ=0.025按a n =2600 r/min 、H n =500r/min 、Hab i =-21/5可得η=1-|a n -H n /(H ab i -1)* H n |*Hψ=1-|2600-500/(-4.2-1)*500|*0.025=97.98%(二) 行星齿轮传动的配齿计算1、传动比的要求——传动比条件即 baH i =1+b z /a z可得 1+b z /a z =63/5=21/5=4.2 =b aH i所以中心轮a 和内齿轮b 的齿数满足给定传动比的要求。
2、保证中心轮、内齿轮和行星架轴线重合——同轴条件为保证行星轮g z 与两个中心轮a z 、b z 同时正确啮合,要求外啮合齿轮a —g 的中心距等于内啮合齿轮b —g 的中心距,即w (a )a g - =()w b g a -称为同轴条件。
对于非变位或高度变位传动,有 m/2(a z +g z )=m/2(b z -g z ) 得 g z =b z -a z /2=63-15/2=243、保证多个行星轮均布装入两个中心轮的齿间——装配条件 想邻两个行星轮所夹的中心角H ϕ=2π/w n中心轮a 相应转过1ϕ角,1ϕ角必须等于中心轮a 转过γ个(整数)齿所对的中心角, 即1ϕ=γ*2π/a z式中2π/a z 为中心轮a 转过一个齿(周节)所对的中心角。
p i =n/H n =1ϕ/H ϕ=1+b z /a z 将1ϕ和H ϕ代入上式,有2π*γ/a z /2π/w n =1+b z /a z 经整理后γ=a z +b z =(15+63)/2=24满足两中心轮的齿数和应为行星轮数目的整数倍的装配条件。
4、保证相邻两行星轮的齿顶不相碰——邻接条件在行星传动中,为保证两相邻行星轮的齿顶不致相碰,相邻两行星轮的中心距应大于两轮齿顶圆半径之和,如图1—2所示可得 l=2w a *sin(180/)ow n >()a g dl=2*2/m*(a z +g z )*sin 60o/2m()a g d =d+2a h =17m满足邻接条件。
(三)行星齿轮传动的几何尺寸和啮合参数计算按齿根弯曲强度初算齿轮模数m 齿轮模数m 的初算公式为m=K式中 m K —算数系数,对于直齿轮传动m K =12.1; 1T —啮合齿轮副中小齿轮的名义转矩,N*m ;1T =a T /w n =95491P /w n n=9549×0.15/3×1600=0.2984N*mA K —使用系数,由《参考文献二》表6—7查得A K =1; F K ∑—综合系数,由《参考文献二》表6—5查得F K ∑=2;FP K —计算弯曲强度的行星轮间载荷分布不均匀系数,由《参考文献二》公式6—5得FP K =1.85;1Fa Y —小齿轮齿形系数, 图6—22可得1Fa Y =3.15;,1z —齿轮副中小齿轮齿数,1z =a z =15;lim F σ—试验齿轮弯曲疲劳极限,2*N mm 按由《参考文献二》图6—26~6—30选取lim F σ=1202*N mm所以m=K =12.1×=0.658 取m=0.9 1)分度圆直径d()a d =m*a z =0.9×15=13.5mm()g d =m*()g z =0.9×24=21.6mm ()b d =m*()b z =0.9×63=56.7mm2) 齿顶圆直径a d齿顶高a h :外啮合1a h =*a h *m=m=0.9内啮合2a h =(*a h -△*h )*m=(1-7.55/2z )*m=0.792()a a d =()a d +2a h =13.5+1.8=15.3mm()a g d =()g d +2a h =21.6+1.8=23.4mm ()a b d =()b d -2a h =56.7-1.584=55.116mm3) 齿根圆直径f d齿根高f h =(*a h +*c )*m=1.25m=1.125 ()f ad =()a d -2f h =13.5-2.25=11.25mm()f g d =()g d -2f h =21.6-2.25=19.35mm ()f b d =()b d +2f h =56.7+2.25=58.95mm4)齿宽b《参考三》表8—19选取d ϕ=1()a b =d ϕ*()a d =1×13.5=13.5mm()a b =d ϕ*+5=13.5+5=18.5mm ()b b =13.5+(5-10)=13.5-5=8.5mm5) 中心距a对于不变位或高变位的啮合传动,因其节圆与分度圆相重合,则啮合齿轮副的中心距为:1、a —g 为外啮合齿轮副ag a =m/2(a z +g z )=0.9/2×(15+24)=17.55mm2、b —g 为内啮合齿轮副bg a =m/2(a z +b z )=0.9/2×(63-24)=17.55mm(四)行星齿轮传动强度计算及校核1、行星齿轮弯曲强度计算及校核 (1)选择齿轮材料及精度等级中心轮a 选选用45钢正火,硬度为162~217HBS ,选8级精度,要求齿面粗糙度a R ≤1.6 行星轮g 、内齿圈b 选用聚甲醛(一般机械结构零件,硬度大,强度、钢性、韧性等性能突出,吸水性小,尺寸稳定,可用作齿轮、凸轮、轴承材料)选8级精度,要求齿面粗糙度a R ≤3.2。
(2)转矩1T1T =a T /w n =95491P /w n n=9549×0.15/3×1600=0.2984N*m=298.4N*mm ; (3)按齿根弯曲疲劳强度校核由《参考文献三》式8—24得出F σ 如F σ≤【F σ】则校核合格。
(4)齿形系数F Y由《参考文献三》表8—12得Fa Y =3.15,Fg Y =2.7,Fb Y =2.29; (5)应力修正系数s Y由《参考文献三》表8—13得sa Y =1.49,sg Y =1.58,sb Y =1.74; (6)许用弯曲应力[]F σ由《参考文献三》图8—24得lim1F σ=180MPa ,lim 2F σ=160 MPa ;由表8—9得F s =1.3 由图8—25得1N Y =2N Y =1; 由《参考文献三》式8—14可得[]1F σ=1N Y *lim1F σ/F s =180/1.3=138 MPa []2F σ=2N Y *lim 2F σ/F s =160/1.3=123.077 MPa1F σ=2K 1T /b 2m a z *Fa Y sa Y =(2×1.1×298.4/13.5×20.9×15)×3.15×1.49=18.78Mpa< []1F σ=138 MPa2F σ=1F σ*Fg Y sg Y /Fa Y sa Y =18.78×2.7×1.587/3.15×1.74=14.62<[]2F σ=123.077MPa 齿根弯曲疲劳强度校核合格。
2、齿轮齿面强度的计算及校核 (1)、齿面接触应力H σ1H σ=0H σ2H σ=0H σ0H σ=H E Z Z Z Z β∑(2)、许用接触应力为Hp σ 许用接触应力可按下式计算,即Hp σ=lim lim /H H S σ*NT L V R w x Z Z Z Z Z Z(3)、强度条件校核齿面接触应力的强度条件:大小齿轮的计算接触应力中的较大H σ值均应不大于其相应的许用接触应力为Hp σ,即 H σ≤Hp σ或者校核齿轮的安全系数:大、小齿轮接触安全系数H S 值应分别大于其对应的最小安全系数lim H S ,即 H S >lim H S查《参考文献二》表6—11可得 lim H S =1.3 所以 H S >1.3 3、有关系数和接触疲劳极限 (1)使用系数A K查《参考文献二》表6—7 选取A K =1 (2)动载荷系数V K查《参考文献二》图6—6可得V K =1.02 (3)齿向载荷分布系数H K β对于接触情况良好的齿轮副可取H K β=1 (4)齿间载荷分配系数Ha K 、Fa K由《参考文献二》表6—9查得 1Ha K =1Fa K =1.1 2Ha K =2Fa K =1.2 (5)行星轮间载荷分配不均匀系数Hp K由《参考文献二》式7—13 得Hp K =1+0.5('Hp K -1) 由《参考文献二》图7—19 得'Hp K =1.5所以 1Hp K =1+0.5('Hp K -1)=1+0.5×(1.5-1)=1.25仿上 2Hp K =1.75 (6)节点区域系数H Z由《参考文献二》图6—9查得H Z =2.06 (7)弹性系数E Z由《参考文献二》表6—10查得E Z =1.605 (8)重合度系数Z ∑由《参考文献二》图6—10查得Z ∑=0.82 (9)螺旋角系数Z βZ β=1(10)试验齿的接触疲劳极限lim H σ由《参考文献二》图6—11~图6—15查得 lim H σ=520Mpa (11)最小安全系数lim H S 、lim H F由《参考文献二》表6-11可得lim H S =1.5、lim H F =2(12)接触强度计算的寿命系数NT Z由《参考文献二》图6—11查得 NT Z =1.38 (13)润滑油膜影响系数L Z 、V Z 、R Z由《参考文献二》图6—17、图6—18、图6—19查得L Z =0.9、V Z =0.952、R Z =0.82 (14)齿面工作硬化系数w Z由《参考文献二》图6—20查得 w Z =1.2 (15)接触强度计算的尺寸系数x Z由《参考文献二》图6—21查得 x Z =1 所以0H σ=H E Z Z Z Z β∑=2.06× 1.605×0.82×1×1H σ=0H σ=2.95=3.52H σ=0H σ=4.32Hp σ=lim lim /H H S σ*NT L V R w x Z Z Z Z Z Z =520/1.3×1.38×0.9×0.95×0.82×1.2×1=464.4所以 H σ≤Hp σ 齿面接触校核合格(五)行星齿轮传动的受力分析在行星齿轮传动中由于其行星轮的数目通常大于1,即w n >1,且均匀对称地分布于中心轮之间;所以在2H —K 型行星传动中,各基本构件(中心轮a 、b 和转臂H )对传动主轴上的轴承所作用的总径向力等于零。