FANUC机器人机器人视觉成像应用D
- 格式:docx
- 大小:506.71 KB
- 文档页数:3
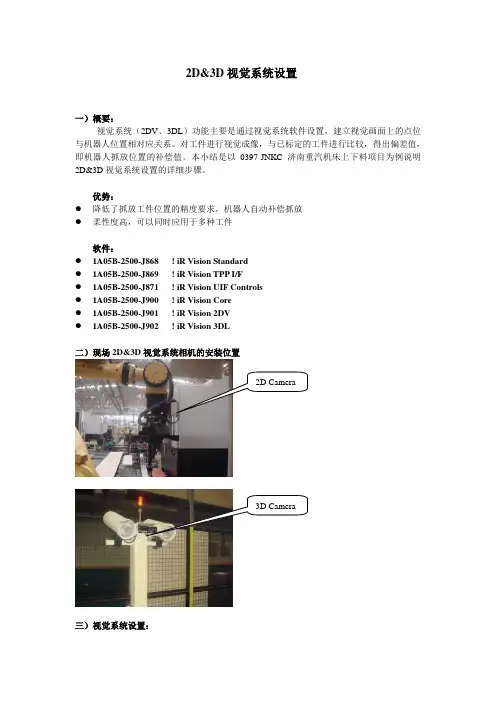
2D&3D视觉系统设置一)概要:视觉系统(2DV、3DL)功能主要是通过视觉系统软件设置,建立视觉画面上的点位与机器人位置相对应关系。
对工件进行视觉成像,与已标定的工件进行比较,得出偏差值,即机器人抓放位置的补偿值。
本小结是以0397-JNKC济南重汽机床上下料项目为例说明2D&3D视觉系统设置的详细步骤。
优势:●降低了抓放工件位置的精度要求,机器人自动补偿抓放●柔性度高,可以同时应用于多种工件软件:●1A05B-2500-J868 ! iR Vision Standard●1A05B-2500-J869 ! iR Vision TPP I/F●1A05B-2500-J871 ! iR Vision UIF Controls●1A05B-2500-J900 ! iR Vision Core●1A05B-2500-J901 ! iR Vision 2DV●1A05B-2500-J902 ! iR Vision 3DL二)现场2D&3D视觉系统相机的安装位置三)视觉系统设置:2D Camera 3D Camera1)机器人与电脑连接设置如下:机器人电脑IP 172.16.0.2 172.16.0.3子网掩码255.255.255.0 255.255.255.0 网关172.16.0.1 172.16.0.13 连接完毕后,在IE地址栏中输入172.16.0.2进入图1图1点击上图中的“Vision Setup”,进入下图。
2)Camera Setup Tools 设置点击上图Vision Setup,然后再点击下图Camera Setup Tools(摄像头设置工具)点,Type:Prograessive Scan CameraName:DV2点击OK,进入下图。
图2 DV2为2D摄像头设置。
DL3为3D摄像头设置。
A)2DV Camera Setup Tools双击DV2,进入图3 双击,进入新建图3B)3DL Camera Setup Tools双击DL3,进入图4图42D摄像头安装在机器人上,打勾曝光时间,越大越亮可条光圈让数值尽可能小摄像点:工件太大时,需要多个照相点。
收那科呆板人视觉成像应用(2D)之阳早格格创做目录第一部分:视觉设定3第二部分:视觉偏偏好角度的读与与应用9应用范畴:摄像头没有拆置正在呆板人上.第一部分:视觉设定收那科呆板人视觉成像(2D-单面成像),为简化支配过程,便当调试,请按照以下步调:1、修坐一个新步调,假设步调名为A1.步调第一止战第二止真质为:UFRAME_NUM=2UTOOL_NUM=2以上二止步调,是为了指定该步调使用的USER坐标系战TOOL坐标系.此坐标系的序号没有该被用做视觉示教时的坐标系.2、网线连交电脑战呆板人统制柜,挨启视频设定网页(图一).3、搁置工件到抓与工位上,通过电脑瞅,工件尽管正在摄像头成像天区核心,且工件该当局部降正在成像天区内.4、安排呆板人位子,使其能准确的抓与到工件.正在步调A1中记录此位子,假设此位子的代号为P1.抬下板滞脚位子,当其抓与工件运止到此位子时自由疏通没有克没有及战其余工件搞涉,假设此面为P2.得到的P1战P2面,便是以来视觉步调中要用到的抓件的趋近面战抓与面.5、拆置定位针,示教坐标TOOL坐标系(没有要使用正在步调A1中使用的坐标系号,假设本质使用的是TOOL3坐标系);TOOL坐标系搞完之后一定没有要拆掉脚抓上的定位针,把示教视觉用的面阵板搁到工件上,通过电脑瞅察,示教板该当尽管正在摄像头成像天区核心.示教USER坐标系(没有要使用正在步调A1中使用的坐标系号,假设本质使用的是USER3坐标系).此时不妨拆掉脚抓上的定位针USER坐标系搞佳之后一定没有要移动示教用的面阵板.6、依照如下图片真质依次设定视觉.图一:设定照相机(只需要变动),也便是曝光时间,包管:当光标划过工件特性天区的最明面时,中g=200安排.其余没有要变动.图二:标定示教面阵板.此时,只需要变动如下真质:图三:标定示教面阵板需要搞的设定图四:标定示教面阵板时,瞅察数据缺面范畴设定完以上真质后,圆不妨移走示教用的面阵板.之前所有时间移动此示教板,皆市制成过失!!图五(与图六为共一个页里,一个图上截屏没有完备.此页只需要变动曝光时间.)图六(与图5是共一个页里)除了设定曝光时间中,什么皆没有要动.正在完毕以上支配后,依照如下步调示教呆板人7、修坐一个新步调,假设步调名为A2.步调第一止战第二止真质为:UFRAME_NUM=3UTOOL_NUM=3以上二止步调,是为了指定该步调使用的USER坐标系战TOOL坐标系.此坐标系的序号是前里刚刚搞完的坐标系.8、通过运止步调A1(前二止必须运止,以指定坐标系),使呆板人到达工件上圆向子,加进步调A2,运止前二止,之后记录该面;之后再运止步调A1,使呆板人到达抓件位子(前二止必须运止,以指定坐标系,可则呆板人报障碍),之后加进步调A2,运止前二止(指定坐标系),再记录该面.正在步调第二止后里,拔出几止,按下图八拔出语句:以上记录的二个面,正在每止后里减少如下语句(光标移到每止末尾里,面CHOIC,不妨采用减少语句),睹图八.9、末尾,别记了,抓件有一个趋近面,有一个抓与面,该当另有一个退出面.退出面设定要领战趋近面是一般的.第二部分:视觉偏偏好角度的读与与应用1、读与视觉偏偏好的角度值PR[1]=VI[1].OFFSET2、变更PR1的坐标系,到笛卡我坐标系CALL INVERSE(1,2)CALL INVERSE(2,1)3、把视觉偏偏好的角度值赋值给R1,用于搞步调用R[1]=PR[1,6]4、如果没有克没有及找到天2步中的指令,依照如下要领对于呆板人设定:加进如下菜单:设定如下选项:此界里采用F3[KAREL]采用步调INVERSE采用CONSTANT后输进数字,连绝二次后步调便写佳了.。

iRVision 小结1. iRVision 概述1.1 Offset 补偿和检测方式根据iRVision 的补偿和测量方式的不同,iRVision 可作以下分类:对具体的应用,理解不同iRVision 的特性并选择一个适合的应用是非常重要的。
●offset 补偿分类- 用户坐标系补偿 (User Frame Offset)机器人在用户坐标系下通过Vision 检测目标当前位置相对初始位置的偏移并自动补偿抓取位置。
- 工具坐标系补偿 (Tool Frame Offset)机器人在工具坐标系下通过Vision 检测在机器人手爪上的目标当前位置相对初始位置的偏移并自动补偿放置位置。
●测量方式分类- 2D 单视野检测 (2D Single-View) 2D 多视野检测 (2D Multi-View)iRVision 2D 只用于检测平面移动的目标 (XY 轴位移、Z 轴旋转角度R)。
其中,用户坐标系必须平行于目标移动的平面,目标在Z 轴方向上的高度必须保持不变。
目标在XY 轴方向上的旋转角度不会被计算在内。
- 2.5D 单视野检测 (2.5D Single-View / Depalletization) IRVision 2.5D 比较 iRVision 2D ,除检测目标平面位移与旋转外,还可以检测Z 轴方向上的目标高度变化。
目标在XY 轴方向上的旋转角度不会被计算在内。
- 3D 单视野检测 (3D Single-View) 3D 多视野检测 (3D Multi-View)iRVision 3D 用于检测目标3维内的位移与旋转角度变化。
检测目标位置 修正机器人姿态放置目标检测目标位置 修正机器人姿态抓取目标用户坐标系 工具坐标系2D 检测2.5D 检测3D 检测1.2 照相机固定方式iRVision支持以下的照相机安装方式:●固定照相机(fixed camera)优势:可以在机器人运动时照相。
照相机连接电缆铺设简易化。
发那科机器人3D视觉快速标定方法
何家恒
【期刊名称】《科技与创新》
【年(卷),期】2022()21
【摘要】主要阐述了机器人视觉系统标定的现状以及现有标定方法的优缺点,标定主要是通过视觉系统软件设置,建立视觉画面上的点位与机器人位置的相对应关系。
对工件进行视觉成像,与已标定的工件进行比较,得出偏差值,即机器人抓放位置的补偿值。
主要利用发那科分拣机器人3D视觉系统的通信和服务功能,通过在目标区
域内触发固定摄像机,利用机器人末端执行器的标定板进行多次学习拍照,再利用机
器人应用程序设计,记录多组图像点和机器人坐标点。
进而标定图像点与机器人坐
标固定点之间的关系,通过编写与工作环境相关的机器人程序,根据计算结果自动标
定相关影响因素,完成可靠性测试,从而确认改进方法计算的工件坐标偏差。
与传统
的2点示教方法相比,工件位置的偏差可以大大减小,从而大大提高了标定速度、方便性和标定精度。
【总页数】4页(P62-64)
【作者】何家恒
【作者单位】广州市技师学院
【正文语种】中文
【中图分类】TP242
【相关文献】
1.并联机器人视觉抓取系统快速标定方法的研究
2.自主分拣机器人视觉系统的快速标定方法
3.基于3D视觉传感器的龙门架机器人手眼标定方法
4.发那科公司推出其首个机器人视觉系统
5.发那科推出其首个内置机器人视觉系统iRVision
因版权原因,仅展示原文概要,查看原文内容请购买。

FANUC机器人DI速度选择一、概述对于FANUC机器人来说,DI速度选择(外部倍率选择)是通过DI信号ON/OFF组合或者GI信号,来远程更改机器人速度倍率的一种功能。
在DI模式下,通过定义两个DI信号,对应四种组合方式,即可切换4种速度倍率。
在GI模式下,通过定义一个GI信号,可以调节机器人的速度范围为微速到百分之百(7DF5版本后才有GI模式)。
设置步骤如下:图 1.1二、信号设置1、DI模式信号设置该项功能为系统标配选项,选择示教器上的[Menu]键—在第6项[Setup](设置)菜单中寻找DI速度选择功能,如下图所示。
图 2.11)选择【DI速度选择】,点击进入,如图2.2所示,将第2行和第3行的信号1和信号2分别设置DI信号。
图 2.22)第4行,第5行,第6行,第7行分别是信号1和信号2的ON/OFF不同的组合下,可以选择4种1~100%的倍率。
3)信号和倍率设置完成后,光标移至第1行,将DI速度选择功能选择“启用”,设置完成,在机器人处于自动状态下,通过DI[30]和DI[31]的ON/OFF不同组合,机器人可以在不同倍率下运行,如图 2.3。
图 2.32、GI模式信号设置在模式选项中选择GI,设置相应的GI信号,点启用即可,如下图 2.4所示图 2.4三、注意事项1)手动模式下DI速度选择功能无法更改机器人速度。
2)自动模式下机器人程序处于中止状态下,无法更改机器人速度。
3)启用本功能后,示教器上的倍率选择处于无效状态。
4)程序中倍率指令OVERRIDRE执行时会被忽略。
5)更改DI信号和倍率值时,需要将该功能置为无效。
6)在断电时该功能有效的状态下,上电后机器人会以该功能设定的倍率进行启动。
7)该功能中DI可以选择同一个信号,但只有在ON/ON或者OFF/OFF的组合才有效。
FANUC机器人R30-iA iRVision视觉系统2D功能内部培训提纲上海发那科机器人有限公司SEP ROBOT_TECH小组目录1空间三维坐标系基础 (1)1.1三维坐标系之间的关系 (1)1.2坐标系的二维变换 (2)1.3机器人坐标系和点直角坐标的表述 (3)2FANUC机器人二维偏移指令的几何含义 (4)2.1Offset PR[]指令 (4)2.2Tool Offset PR[]指令 (5)3视觉的偏移模式 (6)3.1Fixed Frame Offset (6)3.2Tool Offset (7)4相机和Camera setup (8)4.1调焦和光圈 (8)4.2拍摄距离的计算 (9)4.3Camera Setup (10)5Grid pattern calibration setup (12)5.1Robot mounted camera校正 (13)5.2Fixed camera/Robot mounted Grid校正 (15)5.3Fixed camera/Fixed Grid校正 (16)5.4几种相机校正的特点 (18)5.5自动生成Grid Frame功能 (18)6二维Vision Process setup (22)6.1二维Single View Vision Process建立 (22)6.2二维Multi View Vision Process建立 (26)6.3Depalletizing Vision Process建立 (27)7TP程序的编写 (30)7.1标准程序介绍 (30)7.2视觉数据寄存器VR[]及其VOFFSET指令 (31)1空间三维坐标系基础1.1三维坐标系之间的关系空间之内三维坐标系的三个方向分别以x,y,z表示,它们符合右手系。
两个空间三维坐标之间的位置差别称为这两个坐标系的变化方式,即坐标系A通过这种方式变换到和坐标系B。
图1-1两个三维坐标系之间的变化方式示意图FANUC机器人系统中对于坐标系的变换方式的表达符合X-Y-Z固定轴规则。
≪FANUC工业机器人视觉应用技术》教学大纲一、课程信息课程名称:FANUC工业机器人视觉应用技术课程类别:素质选修课/专业基础课课程性质:选修/必修计划学时:64计划学分,4先修课程:无选用教材:《FANUC工业机器人视觉应用技术》,寇舒主编,2022年,电子工业出版社教材。
适用专业:本课程图文并茂,结构清晰,易教易学,可作为高等职业院校机电一体化专业、电气自动化专业、机器人专业的教学课程,也可作为相关工程技术初学人员的学习参考课程。
二、课程简介根据职业岗位需求,采用项目引导、任务驱动的模式,每个任务均有任务单、信息页和工作页全课程共包含7个学习情境,以发那科工业机器人为主要对象,讲解工业机器人的基本工作原理和应用知识,包括工业机器人结构、发展与应用、基本的编程语句和编程方法等。
三、课程教学要求注:“课程教学要求”栏中内容为针对该课程适用专业的专业毕业要求与相关教学要求的具体描述。
“关联程度”栏中字母表示二者关联程度。
关联程度按高关联、中关联、低关联三档分别表示为“H”“V”或"L”。
“课程教学要求”及“关联程度”中的空白栏表示该课程与所对应的专业毕业要求条目不相关。
四、课程教学内容五、考核要求及成绩评定六、学生学习建议(一)学习方法建议1 .依据专业教学标准,结合岗位技能职业标准,通过例题展开学习,掌握相对应的数据的计算方法。
2 .通过每个项目最后搭配的习题,巩固知识点。
3 .进行练习和实践,提高自己的技能和应用能力,加深对知识的理解和记忆。
(二)学生课外阅读弁考资料《FANUC工业机器人视觉应用技术》,寇舒主编,2022年,电子工业出版社教材。
七、课程改革与建设本课程将学习情境的制定与任务驱动、项目教学、理论实践相结合,紧跟企业需求,真正体现工学结合的特点。
在编写本课程时,先从实际工业生产应用中提炼典型工作任务,再按照由易入难的原则构建符合教学要求的学习情境,每个学习情境都与一个完整的工作过程相对应,最后形成与高等职业教育改革需求相匹配的教学内容。
F A N U C机器人机器人视觉成像应用(2D)发那科机器人视觉成像应用(2D)目录第一部分:视觉设定 (3)UFRAME_NUM=2 (3)UTOOL_NUM=2 (3)UFRAME_NUM=3 (7)UTOOL_NUM=3 (7)第二部分:视觉偏差角度的读取与应用 (9)PR[1]=VI[1].OFFSET (9)R[1]=PR[1,6] (9)应用范围:摄像头不安装在机器人上。
第一部分:视觉设定发那科机器人视觉成像(2D-单点成像),为简化操作流程,方便调试,请遵循以下步骤:1、建立一个新程序,假设程序名为A1。
程序第一行和第二行内容为:UFRAME_NUM=2UTOOL_NUM=2以上两行程序,是为了指定该程序使用的USER坐标系和TOOL坐标系。
此坐标系的序号不应被用作视觉示教时的坐标系。
2、网线连接电脑和机器人控制柜,打开视频设定网页(图一)。
3、放置工件到抓取工位上,通过电脑看,工件尽量在摄像头成像区域中心,且工件应该全部落在成像区域内。
4、调整机器人位置,使其能准确的抓取到工件。
在程序A1中记录此位置,假设此位置的代号为P1。
抬高机械手位置,当其抓取工件运行到此位置时自由运动不能和其他工件干涉,假设此点为P2。
得到的P1和P2点,就是以后视觉程序中要用到的抓件的趋近点和抓取点。
5、安装定位针,示教坐标TOOL坐标系(不要使用在程序A1中使用的坐标系号,假设实际使用的是TOOL3坐标系);TOOL坐标系做完之后一定不要拆掉手抓上的定位针,把示教视觉用的点阵板放到工件上,通过电脑观察,示教板应该尽量在摄像头成像区域中心。
示教USER坐标系(不要使用在程序A1中使用的坐标系号,假设实际使用的是USER3坐标系)。
此时可以拆掉手抓上的定位针USER坐标系做好之后一定不要移动示教用的点阵板。
6、按照如下图片内容依次设定视觉。
图一:设定照相机(只需要更改),也就是曝光时间,保证:当光标划过工件特征区域的最亮点时,中g=200左右。
发那科机器人视觉功能详解
发那科3D视觉应用
1
iRVision 2.5D 视觉堆垛
视觉堆垛程序通过相机视野内目标比例的变化来估算目标的高度并引导机器人的运动补偿目标的偏移,不但包括X轴,Y轴和X-Y平面旋转度R,也同时包括Z轴。
使用iRVision 2.5D允许机器人只借助一个普通2D相机来拾取码放堆集的目标。
2
iRVision 视觉堆垛程序_1 (从寄存器R提取Z轴偏移)
此功能通过视觉计算寻找目标的2D位置和指定的寄存器数值,并引导机器人的运动补偿目标的偏移,不但包括X轴,Y轴和X-Y平面旋转度R,也同时包括Z轴。
寄存器R被用作存储已知的目标Z轴高度,或者通过距离传感器检测出的Z轴高度信息。
3
RVision 视觉堆垛程序_2 (从堆垛层数提取Z轴偏移)
此功能通过视觉结合视觉检测结果和根据目标比例确定的目标层数(目标高度)计算目标的位置。
目标层数依照参考比例和高度数据自动确定,因而,即使在视觉检测中存在细微的比例误差,也可以通过一个离散的层数(目标高度)来计算目标的具体位置。
4
iRVision 2DV 复数视野功能
2D复数视野程序提供通过若干固装式照相机定位大型目标的能力,对通过Robot-Mounted 式照相机
进行检测同样有效。
5。
2D视觉的应用组成一.相机的外部连接二.TCP的设定三.视觉的设定四.视觉程序编写相机的连接根据相机的固定位置不同,在2D视觉中主要有以下两种模式1.相机固定模式。
2.相机固定在机器人手爪上的模式。
相机的连接根据选择的相机型号,要使相机能够正常运行,需要将相机中78ON OFF的拨码开关按置如下图所示:、置,其余为。
相机型号:SONY XC-56。
30万像素相机的连接根据选择的相机型号,要使相机能够正常运行,需要将相机中78ON OFF的拨码开关按置如下图所示:、置,其余为。
相机型号:SONY XC-HR56,SONY XC-HR57 。
100万像素,可带彩色视觉相机的连接视觉系统的组成:就是使用视觉电缆线将相机于控制柜相连。
当只外接一个相机的时候,视觉电缆线于主板上的JRL6接头相连即可。
主板上的接头JRL6A660-2006-T428#L7R003(7m)A660-2006-T428#L14R03(14m)A660-2006-T428#L20R03(20m)相机的连接由于主板上只有一个JRL6接口,故只能连接一个相机。
若一台机器人上需要同时使用多个相机进行视觉测试,就需要另外配置一个转换器Multiplexer,用来连接多个相机。
如下图所示:相机的连接转换器Multiplexer有四种型号可供选择:Multiplexer A : 最多可以连接4个2D相机或者4个3D相机。
Multiplexer B : 最多可以连接4个2D相机。
3D相机不支持。
Multiplexer C : 最多可以连接8个2D相机。
3D相机不支持。
Multiplexer D : 用于相机固定在机器人手爪上模式。
最可可以连接4个2D相机或者4个3D相机。
TCP的设定在2D视觉中,需要设置一个精确的TCP。
TCP将会用于相机标定中的用户坐标系的设定。
TCP不准确会导致最后抓取工件时的误差较大。
2D视觉设置步骤1.建立机器人与电脑的连接。
FANUC视觉成像应用(2D)FANUC视觉成像应用(2D)一、引言1.1 目的本文档旨在介绍FANUC在2D视觉成像应用领域的相关技术和操作方法,帮助用户了解如何使用视觉成像系统进行物体检测、定位和测量等操作。
1.2 文档范围本文档适用于使用FANUC进行2D视觉成像应用的用户,包括系统安装调试人员和操作人员。
二、术语和定义2.1 FANUCFANUC是一种先进的自动化,具有高度智能化和自主学习能力。
2.2 2D视觉成像应用2D视觉成像应用是指利用2D图像处理技术,通过机器视觉系统获取物体的表面信息,并对其进行处理和分析。
2.3 物体检测物体检测是指利用机器视觉系统识别和定位目标物体在图像中的位置和形状。
2.4 定位定位是指确定物体在坐标系中的位置和姿态。
2.5 测量测量是指利用机器视觉系统对物体的尺寸、形状等参数进行测量和分析。
三、机器视觉系统概述3.1 系统组成FANUC的视觉成像应用系统主要由以下组件构成:相机、图像采集卡、图像处理软件和通信接口。
3.2 系统工作原理机器视觉系统通过相机采集物体图像,经过图像采集卡传输到计算机上进行图像处理和分析,然后通过通信接口将处理结果传输给FANUC进行相应的操作。
四、系统安装和调试4.1 系统安装4.1.1 相机安装4.1.2 图像采集卡安装4.1.3 图像处理软件安装4.1.4 通信接口设置4.2 系统调试4.2.1 相机参数设置4.2.2 图像采集设置4.2.3 图像处理设置4.2.4 通信接口调试五、物体检测操作指南5.2 设置检测参数5.3 运行物体检测任务5.4 结果分析和处理六、定位操作指南6.2 设置定位参数6.3 运行定位任务6.4 结果处理和校准七、测量操作指南7.2 设置测量参数7.3 运行测量任务7.4 结果分析和处理八、附件本文档涉及的附件包括.1)系统安装和调试手册;2)操作指南;3)示例程序代码。
九、法律名词及注释9.1 著作权著作权是指对文字、美术作品、音乐作品、电影、录音录像制品等作品的制作者享有的平等的权利。
FANUC机器人视觉系统FANUC机器人视觉系统编者语:轻松降低成本,创造自动化时代。
FANUC作为全球领先的工业机器人制造商,引领着全球工业的自动化进程。
当全球企业无一例外面对“成本上涨”的挑战时,FANUC极大地帮助客户提高生产效率和生产质量、降低了人力消耗,更通过完善的技术成为节能领域的先锋和支持者。
2008年,全球企业无一例外面对“成本上涨”的挑战,对于依赖人力和技术的制造型企业尤为严重,如何减少人力的投入,降低废品率,压缩生产成本,成为必需纳入议事日程的重要“课题”。
来自日本的FANUC机器人有限公司恰好能为这些企业提供“答案”。
FANUC作为全球领先的工业机器人制造商,引领着全球工业的自动化进程。
FANUC极大地帮助客户提高生产效率和生产质量、降低人力消耗,更通过完善的技术成为节能领域的先锋和支持者。
公司不仅拥有计算机图形工作站和三维仿真软件等设备用于三维系统仿真,同时拥有电弧焊、喷涂和2D视觉系统实验设备用于应用实验和系统方案确认。
目前,有2000名员工为FANUC机器人研制提供服务,年销售额达32亿美元,每月销售台数达1800台。
在机器人自动化生产工厂,1000多台机器人实现无人化生产管理,负责FANUC 的伺服系统、智能机械及机器人从零部件生产到最后的整机出厂检验这一全套自动化生产。
每月产能突破2500台机器人,至2008年6月底,FANUC机器人全球生产总量突破20万台。
FANUC在发展过程中,持续向包括汽车、饮料等多种工业领域的用户提供创新的机器人工程解决方案,开展从机器人系统的方案设计、系统仿真、设计、装配到安装调试的全方位服务。
致力于为客户的发展提供更好的“成本解决方案”。
作为工博会的长期支持者,FANUC带来的仍是引领科技的智能机器人,同时为客户展示“成本解决最佳答案”。
视觉系统FANUC iR Vision 2DV视觉系统:该视觉系统由一个安装于手爪上的2D摄像头完成视觉数据采集。
F A N U C机器人机器人视
觉成像应用D
This manuscript was revised by the office on December 10, 2020.
发那科机器人视觉成像应用(2D)
目录
应用范围:摄像头不安装在机器人上。
第一部分:视觉设定
发那科机器人视觉成像(2D-单点成像),为简化操作流程,方便调试,请遵循以下步骤:
1、建立一个新程序,假设程序名为A1。
程序第一行和第二行内容为:
UFRAME_NUM=2
UTOOL_NUM=2
以上两行程序,是为了指定该程序使用的USER坐标系和TOOL坐标系。
此坐标系的序号不应被用作视觉示教时的坐标系。
2、网线连接电脑和机器人控制柜,打开视频设定网页(图一)。
3、放置工件到抓取工位上,通过电脑看,工件尽量在摄像头成像区域中心,且工件应该
全部落在成像区域内。
4、调整机器人位置,使其能准确的抓取到工件。
在程序A1中记录此位置,假设此位置的
代号为P1。
抬高机械手位置,当其抓取工件运行到此位置时自由运动不能和其他工件干涉,假设此点为P2。
得到的P1和P2点,就是以后视觉程序中要用到的抓件的趋近点和抓取点。
5、安装定位针,示教坐标TOOL坐标系(不要使用在程序A1中使用的坐标系号,假设实
际使用的是TOOL3坐标系);TOOL坐标系做完之后一定不要拆掉手抓上的定位针,把示教视觉用的点阵板放到工件上,通过电脑观察,示教板应该尽量在摄像头成像区域中心。
示教USER坐标系(不要使用在程序A1中使用的坐标系号,假设实际使用的是USER3坐标系)。
此时可以拆掉手抓上的定位针USER坐标系做好之后一定不要移动示教用的点阵板。
6、按照如下图片内容依次设定视觉。
图一:设定照相机(只需要更改),也就是曝
光时间,保证:当光标划过工件特征区域的最亮点时,
中g=200左右。
其他不要更改。
图二:标定示教点阵板。
此时,只需要更改如下内容:
图三:标定示教点阵板需要做的设定
图四: 标定示教点阵板时,观察数据误差范围
设定完以上内容后,方可以移走示教用的点阵板。
之前任何时候移动此示教板,都会造成错误!!
图五(与图六为同一个页面,一个图上截屏不完整。
此页只需要更改曝光时间。
)图六(与图5是同一个页面)除了设定曝光时间外,什么都不要动。
图七:此图完成后,才可以做图6的set .ref.pos
在完成以上操作后,按照如下步骤示教机器人
7、建立一个新程序,假设程序名为A2。
程序第一行和第二行内容为:
UFRAME_NUM=3
UTOOL_NUM=3
以上两行程序,是为了指定该程序使用的USER坐标系和TOOL坐标系。
此坐标系的序号是前面刚做完的坐标系。
8、通过运行程序A1(前两行必须运行,以指定坐标系),使机器人到达工件上方位置,
进入程序A2,运行前两行,之后记录该点;之后再运行程序A1,使机器人到达抓件位置(前两行必须运行,以指定坐标系,否则机器人报故障),之后进入程序A2,运行前两行(指定坐标系),再记录该点。
在程序第二行后面,插入几行,按下图八插入语句:
以上记录的两个点,在每行后面增加如下语句(光标移到每行最后面,点CHOIC,可以选择增加语句),见图八。
9、最后,别忘了,抓件有一个趋近点,有一个抓取点,应该还有一个退出点。
退出点设
定方法和趋近点是一样的。
第二部分:视觉偏差角度的读取与应用
1、读取视觉偏差的角度值
PR[1]=VI[1].OFFSET
2、变换PR1的坐标系,到笛卡尔坐标系
CALL INVERSE(1,2)
CALL INVERSE(2,1)
3、把视觉偏差的角度值赋值给R1,用于做程序用
R[1]=PR[1,6]
4、如果不能找到地2步中的指令,按照如下方法对机器人设定:
进入如下菜单:
设定如下选项:
此界面选择F3[KAREL]
选择程序INVERSE
选择CONSTANT后输入数字,连续两次后程序就写好了.。