第三章稳定性分析
- 格式:ppt
- 大小:933.50 KB
- 文档页数:25
第三章 线性系统的稳定性分析3.1 概述如果在扰动作用下系统偏离了原来的平衡状态,当扰动消失后,系统能够以足够的准确度恢复到原来的平衡状态,则系统是稳定的。
否则,系统不稳定。
一个实际的系统必须是稳定的,不稳定的系统是不可能付诸于工程实施的。
因此,稳定性问题是系统控制理论研究的一个重要课题。
对于线性系统而言,其响应总可以分解为零状态响应和零输入响应,因而人们习惯分别讨论这两种响应的稳定性,从而外部稳定性和内部稳定性的概念。
应用于线性定常系统的稳定性分析方法很多。
然而,对于非线性系统和线性时变系统,这些稳定性分析方法实现起来可能非常困难,甚至是不可能的。
李雅普诺夫(A.M. Lyapunov)稳定性分析是解决非线性系统稳定性问题的一般方法。
本章首先介绍外部稳定性和内部稳定性的概念及其相互关系,然后介绍李雅普诺夫稳定性的概念及其判别方法,最后介绍线性定常系统的李雅普诺夫稳定性分析。
虽然在非线性系统的稳定性问题中,Lyapunov 稳定性分析方法具有基础性的地位,但在具体确定许多非线性系统的稳定性时,却并不是直截了当的。
技巧和经验在解决非线性问题时显得非常重要。
在本章中,对于实际非线性系统的稳定性分析仅限于几种简单的情况。
3.2 外部稳定性与内部稳定性3.2.1 外部稳定:考虑一个线性因果系统,如果对一个有界输入u (t ),即满足条件:1()u t k ≤<∞的输入u (t ),所产生的输出y (t )也是有界的,即使得下式成立:2()y t k ≤<∞则称此因果系统是外部稳定的,即BIBO (Bounded Input Bounded Output )稳定。
注意:在讨论外部稳定性的时候,我们必须要假定系统的初始条件为零,只有在这种假定下面,系统的输入—输出描述才是唯一的和有意义的。
系统外部稳定的判定准则系统的BIBO 稳定性可根据脉冲响应矩阵或者传递函数矩阵来进行判别。
a) 时变情况的判定准则对于零初始条件的线性时变系统,设(,)G t τ为脉冲响应矩阵,则系统BIBO 稳定的充要条件是,存在一个有限常数k ,使对于一切0[,),(,)t t G t τ∈∞的每一个元0(,)(1,2,.......;1,2,.....)(,)ij tij t g t i q j p g t d k τττ==≤<∞⎰有即,(,)G t τ是绝对可积的。

第三章飞机的稳定性和操纵性3.1 飞机的稳定性在飞行中,飞机会经常受到各种各样的扰动,如气流的波动、发动机工作不稳定、飞行员偶然触动驾驶杆等。
这些扰动会使飞机偏离原来的平衡状态,而在偏离以后,飞机能否自动恢复原状,这就是有关飞机的稳定或不稳定的问题。
飞机的稳定性是飞机本身的一种特性,与飞机的操纵性有密切的关系。
例如,飞行员操纵杆、舵,需要用力的大小,飞机对杆、舵操纵的反应等,都与飞机的稳定性有关。
因此,研究飞机的稳定性是研究飞机操纵性的基础。
所谓飞机的稳定性,就是在飞行中,当飞机受微小扰动而偏离原来的平衡状态,并在扰动消失以后,不经驾驶员操纵,飞机能自动恢复原来平衡状态的特性。
3.1.1 纵向稳定性飞机的纵向稳定性是指飞机绕横轴的稳定性。
当飞机处于平衡飞行状态时,如果有一个小的外力干扰,使它的攻角变大或变小,飞机抬头或低头,绕横轴上下摇摆(也称为俯仰运动)。
当外力消除后,驾驶员如果不操纵飞机,而靠飞机本身产生一个力矩,使它恢复到原来的平衡飞行状态,我们就说这架飞机是纵向稳定的。
如果飞机不能靠自身恢复到原来的状态,就称为纵向不稳定的。
如果它既不恢复,也不远离,总是上下摇摆,就称为纵向中立稳定的。
飞机的纵向稳定性也称为俯仰稳定性。
飞机的纵向稳定性由飞机重心在焦点之前来保证。
影响飞机纵向稳定性的主要因素有飞机的水平尾翼和飞机的重心位置。
下面,我们首先来看一下水平尾翼是如何影响飞机的纵向稳定性的。
当飞机以一定的攻角作稳定的飞行时,如果一阵风从下吹向机头,使飞机机翼的攻角增大,飞机抬头。
阵风消失后,由于惯性的作用,飞机仍要沿原来的方向向前冲一段路程。
这时由于水平尾翼的攻角也跟着增大,从而产生了一个低头力矩。
飞机在这个低头力矩作用下,使机头下沉。
经过短时间的上下摇摆,飞机就可恢复到原来的飞行状态。
同样,如果阵风从上吹向机头,使机头下沉,飞机攻角减小,水平尾翼的攻角也跟着减小。
这时水平尾翼上产生一个抬头力矩,使飞机抬头,经过短时间的上下摇摆,也可使飞机恢复到原来的飞行状态。
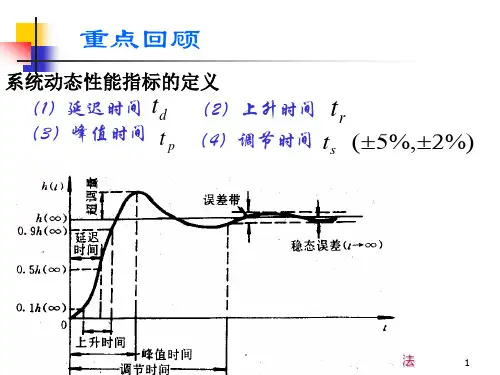
典型系统的时域响应和稳定性分析一、 实验目的1.研究二阶系统的特征参量(ξ、ωn )对过渡过程的影响。
2.研究二阶对象的三种阻尼比下的响应曲线及系统的稳定性。
3.熟悉Routh 判据,用Routh 判据对三阶系统进行稳定性分析。
4. 学习用电路系统研究一般控制系统的仿真实验方法二、 实验设备PC 机一台,Matlab ,Multisim (或PSpice)。
三、 实验原理及内容1.典型的二阶系统稳定性分析 (1) 结构框图:见图2-1图2-1(2) 对应的模拟电路图图2-2(3) 理论分析系统开环传递函数为:)1S T (S T K )1S T (S T K )S (G 101101+=+=;开环增益01T K K =。
(4) 实验内容先算出临界阻尼、欠阻尼、过阻尼时电阻R 的理论值,再将理论值应用于模拟电路中,观察二阶系统的动态性能及稳定性,应与理论分析基本吻合。
在此实验中(图2-2),s 1T 0=, s T 2.01=,R 200K 1= R 200K =⇒系统闭环传递函数为:KS S KS S S W n n n 5552)(2222++=++=ωζωω 其中自然振荡角频率:R1010T K 1n ==ω;阻尼比:40R1025n =ω=ζ。
2.典型的三阶系统稳定性分析 (1) 结构框图图2-3(2) 模拟电路图图2-4(3) 理论分析系统的开环传函为:)1S 5.0)(1S 1.0(S R 500)S (H )S (G ++=(其中R 500K =),系统的特征方程为:0K 20S 20S 12S 0)S (H )S (G 123=+++⇒=+。
(4) 实验内容实验前由Routh 判断得Routh 行列式为:S 3 1 20 S 2 12 20K S 1 (-5K/3)+20 0S 0 20K 0为了保证系统稳定,第一列各值应为正数,所以有 ⎪⎩⎪⎨⎧>>+-0K 20020K 35得: 0 < K < 12 ⇒ R > 41.7KΩ 系统稳定K = 12 ⇒ R = 41.7KΩ 系统临界稳定 K > 12 ⇒ R < 41.7KΩ 系统不稳定四、 实验步骤1. 实验中阶跃信号幅值为1V 左右。