如何使用开发板(ARM+Linux)
- 格式:pdf
- 大小:527.77 KB
- 文档页数:86
TQ2440开发板使用手册包含以下内容:一、硬件概述1. 开发板简介:TQ2440是一款基于Samsung S3C2440A处理器的ARM9开发板,配备了丰富的外围接口和扩展资源,适用于嵌入式系统学习和开发。
2. 硬件资源:TQ2440开发板提供了多种硬件资源,包括存储器、GPIO、UART、I2C、SPI、ADC、PWM、SD卡接口等。
3. 开发板结构:介绍了开发板的布局、主要芯片和接口的位置及功能。
二、开发环境搭建1. 开发工具:介绍了用于TQ2440开发板的开发工具,如交叉编译器、调试器等。
2. 开发环境配置:详细说明了如何配置开发环境,包括安装交叉编译器、设置环境变量等。
3. 编译和烧写程序:介绍了如何编译和烧写程序到TQ2440开发板上。
三、基础实验1. LED实验:通过控制GPIO口实现LED灯的亮灭。
2. UART实验:通过UART接口实现串口通信,可以与其他设备或电脑进行数据传输。
3. ADC实验:通过ADC接口采集模拟信号,并将其转换为数字信号进行处理。
4. PWM实验:通过PWM接口生成脉冲宽度调制信号,可用于电机控制等应用。
5. I2C实验:通过I2C接口实现与I2C设备的通信,如EEPROM、温度传感器等。
6. SPI实验:通过SPI接口实现与SPI设备的通信,如SD卡、FLASH等。
7. 中断实验:介绍了如何使用中断服务程序处理外部事件或定时任务。
8. SDRAM实验:通过操作SDRAM实现大容量数据的存储和访问。
9. FLASH实验:通过操作FLASH实现程序的固化和数据的非易失性存储。
四、高级应用1. Linux系统移植:介绍了如何在TQ2440开发板上移植Linux 操作系统。
2. 文件系统操作:介绍了如何在TQ2440开发板上实现文件系统的挂载和操作。
3. 网络通信:介绍了如何在TQ2440开发板上实现网络通信功能,包括以太网和WIFI等。
4. USB设备驱动:介绍了如何在TQ2440开发板上实现USB设备的驱动和应用。
交叉编译环境以及开发板上-binsh:.hello:notfound(使⽤arm-linu。
⽬标板是S3C2440.⾄于交叉编译环境的搭建就不多说了,⽹上很多教程.搭建好了交叉编译环境后,第⼀件事就是传说中的”Hello,World!”.⼀. 主机编译环节我使⽤的系统是ubuntu10.04,搭建好交叉编译环境后,终端输⼊arm-linux-gcc -v能够正常显⽰版本信息,但是输⼊sudo arm-linux-gcc -v后却显⽰命令⽆法找到.我试过很多种⽅法,⽐如sudo -s切换到root后,编辑$PATH,将编译器路径加⼊.然后exit到普通⽤户.仍然不能执⾏sudo arm-linux-gcc -v. 这⾥如果哪位⼤⽜知道是什么原因的可以留⾔告诉我,谢谢:)由于编译.c的⽂件后,要产⽣新的⽂件,因此要super的权限.⼜不能使⽤sudo arm-linux-gcc,于是可以先sudo -s到root⽤户,再使⽤arm-liunux-gcc来进⾏编译.⼆. ⽬标板执⾏环节我是使⽤FTP在主机和⽬标板之间传送⽂件.传送过去后要注意改变权限.这⾥要注意⼏点:1. 要确定ftp过来后的⽂件的默认的存放路径.这个只要在⽬标机的终端机上确认下即可.(这个地⽅没有确认可能就会显⽰找不到命令)2. 传送过来的⽂件要更改权限才能运⾏.可以⽤:chmod 777 hellochmod +x hello3. 执⾏./hello这时,报错:-/bin/sh: ./hello: not found三. 问题排除⽤过绝对路径也试过之后就确定并不是⽂件是否存在的问题,⽽是这个⽂件并不能被执⾏.GOOGLE之后可以发现,排除上⾯提到问题后,就将问题定位到动态链接库上.于是在主机上⽤arm-linux-gcc -static -o 来进⾏静态编译.然后将新产⽣的⽂件传到⽬标板上.可以发现通过静态编译的⽂件明显⽐动态编译的要⼤.然后再次执⾏./hello 可以看到屏幕上出现了久违的Hello,World!问题到这⾥还没有完,我们可以再思考下怎么彻底解决,⽽不是每次都使⽤静态编译.既然是动态库引起的问题,那么应该和编译器的版本有关.在安装编译环境的时候同时安装了3.4.1和4.3.3两个版本.⽤户⼿册上说其中3.4.1是⽤来编译u-boot的,4.3.3版本是⽤来编译Linux内核和Qtipia的,两个版本均可以⽤来编译应⽤程序.既然我们的内核使⽤4.3.3编译的,⽽我们刚才编译hello是使⽤3.4.1编译的,那么会不会是这个原因呢?于是我们试⼀下,将$PATH中的原来包含3.4.1/bin 的路径改为 4.4.3/bin . 修改的⽅法⽹上有很多.(直接export PATH=”想要的路径”)再次编译,下载.⽬标板上执⾏,成功显⽰”Hello,World!”.可以看到系统中动态库的⽀持和编译器还是有关的./lzjsky/p/3730183.html。
ARM开发板如何安装Linux系统
注意:本小节假定您已经连接好开发板的和PC机之间的串口和USB口,
并把开发板设置为NORFlash启动,系统更新和安装完毕请设置为NandFlash
启动。
本文下载的bootloader、内核和文件系统是友善之臂公司提供的,可以
在这里下载到arm9home/read.php?tid-974.html。
当然其它的bootloader、内核以及文件系统下载方式也是类似的,可能bootloader不同造成bootloader的菜单
项不同,但一般都有对应的菜单项,另外这里使用的串口工具是windows的超
级终端,其它的串口调试工具也是同样可用的。
说明:安装Linux所需要的二进制文件位于光盘的imageslinux目录中。
安装Linux系统主要有以下步骤:
(1)对NandFlash进行分区
(2)安装bootloader
(3)安装内核文件
(4)安装文件系统
下面是详细的步骤。
1、分区
提示:分区将会擦除NandFlash里面的所有数据
(1)连接好串口,打开超级终端,上电norflash启动开发板,进入BIOS功能
菜单:
(2)选择功能号[f]开始对NandFlash进行分区,如图所示。
2、安装bootloader
(1)打开DNW程序,接上USB电缆,如果DNW标题栏提示[USB:OK],。
烧写ARM开发板系统教程-----uboot、内核以及⽂件系统⼀、sd启动将u-boot镜像写⼊SD卡,将SD卡通过读卡器接上电脑(或直接插⼊笔记本卡槽),通过"cat /proc/partitions"找出SD卡对应的设备,我的设备节点是/dev/sdb.(内存卡的节点)。
当有多个交叉编译器是,不⽅便设置环境变量时,可以在编译命令中指定交叉编译器,具体如下:在源码中操作以下步骤:make distcleanmake ARCH=arm CROSS_COMPILE=/opt/FriendlyARM/toolschain/4.5.1/bin/arm-none-linux-gnueabi- mrpropermake ARCH=arm CROSS_COMPILE=/opt/FriendlyARM/toolschain/4.5.1/bin/arm-none-linux-gnueabi- tiny210_configmake ARCH=arm CROSS_COMPILE=/opt/FriendlyARM/toolschain/4.5.1/bin/arm-none-linux-gnueabi- all spl编译出tiny210-uboot.bin,注意交叉编译⼯具路径执⾏下⾯的命令$sudo dd iflag=dsync oflag=dsync if=tiny210-uboot.bin of=/dev/sdb seek=1把内存卡插⼊开发板,使⽤串⼝⼯具设置环境变量:setenv gatewayip 192.168.1.1(电脑⽹关)setenv ipaddr 192.168.1.102(开发板ip,不要与虚拟机和电脑ip冲突)setenv netmask 255.255.255.0setenv serverip 192.168.1.10(虚拟机ip)saveenv⼆、nand启动烧写Uboot:通过SD卡启动的u-boot for tiny210 将u-boot镜像写⼊nandflash在虚拟机下重启tftp sudo service tftpd-hpa restart开发板终端下执⾏下⾯的命令:[FriendlyLEG-TINY210]# tftp 21000000 tiny210-uboot.bin[FriendlyLEG-TINY210]# nand erase.chip[FriendlyLEG-TINY210]# nand write 21000000 0 3c1f4 (写⼊长度)内核的烧写位置是0x600000开始的区域,⽂件系统烧写位置为0xe00000开始的区域。
ARM开发板使用手册PHILIP LPC2132ARM7TDMI第一章介绍LPC2132开发板是专门为arm 初学者开发的实验板,用户可以做基础的arm实验,也可以做基于ucos-ii的操作系统实验。
本系统的实验源代码全部开放,用户可以在此基础上开发产品,减少重复劳动。
由于LPC2132体积很小,并且功能强大,因此特别适合需要复杂智能控制的场合,其运行速度高于早期的80486计算机,而体积只有指甲大。
我们已经将LPC2132产品成功应用在干扰比较强的工业场合,经过6个月的运行,各项指标符合要求。
因此我们特别推荐这一款开发板作为ARM初学者入门。
由于此款开发板体积很小,非常适合直接应用在工业以及民用智能控制器的场合。
LPC2132 CPU介绍LPC2131/2132/2138 是基于一个支持实时仿真和跟踪的16/32 位ARM7TDMI-STM CPU,并带有32kB、64kB 和512kB 嵌入的高速Flash 存储器。
128 位宽度的存储器接口和独特的加速结构使32 位代码能够在最大时钟速率下运行。
对代码规模有严格控制的应用可使用16 位Thumb 模式将代码规模降低超过30%,而性能的损失却很小。
较小的封装和很低的功耗使LPC2131/2132/2138 特别适用于访问控制和POS 机等小型应用中;由于内置了宽范围的串行通信接口和8/16/32kB 的片内SRAM,它们也非常适合于通信网关、协议转换器、软件modem、语音识别、低端成像,为这些应用提供大规模的缓冲区和强大的处理功能。
多个32 位定时器、1个或2 个10 位8 路的ADC、10 位DAC、PWM 通道、47 个GPIO 以及多达9 个边沿或电平触发的外部中断使它们特别适用于工业控制应用以及医疗系统。
主要特性●●16/32 位ARM7TDMI-S 核,超小LQFP64 封装。
●●8/16/32kB 的片内静态RAM 和32/64/512kB 的片内Flash 程序存储器。
嵌入式实验报告:学号:学院:日期:实验一熟悉嵌入式系统开发环境一、实验目的熟悉Linux 开发环境,学会基于S3C2410 的Linux 开发环境的配置和使用。
使用Linux的armv4l-unknown-linux-gcc 编译,使用基于NFS 方式的下载调试,了解嵌入式开发的基本过程。
二、实验容本次实验使用Redhat Linux 9.0 操作系统环境,安装ARM-Linux 的开发库及编译器。
创建一个新目录,并在其中编写hello.c 和Makefile 文件。
学习在Linux 下的编程和编译过程,以及ARM 开发板的使用和开发环境的设置。
下载已经编译好的文件到目标开发板上运行。
三、实验设备及工具硬件::UP-TECH S2410/P270 DVP 嵌入式实验平台、PC 机Pentium 500 以上, 硬盘10G 以上。
软件:PC 机操作系统REDHAT LINUX 9.0+超级终端(或X-shell)+AMR-LINUX 开发环境。
四、实验步骤1、建立工作目录[rootlocalhost root]# mkdir hello[rootlocalhost root]# cd hello2、编写程序源代码我们可以是用下面的命令来编写hello.c的源代码,进入hello目录使用vi命令来编辑代码:[rootlocalhost hello]# vi hello.c按“i”或者“a”进入编辑模式,将上面的代码录入进去,完成后按Esc 键进入命令状态,再用命令“:wq!”保存并退出。
这样我们便在当前目录下建立了一个名为hello.c的文件。
hello.c源程序:#include <stdio.h>int main() {char name[20];scanf(“%s”,name);printf(“hello %s”,name);return 0;}3、编写Makefile要使上面的hello.c程序能够运行,我们必须要编写一个Makefile文件,Makefile文件定义了一系列的规则,它指明了哪些文件需要编译,哪些文件需要先编译,哪些文件需要重新编译等等更为复杂的命令。
实验一熟悉Linux开发环境一、实验目的1.熟悉Linux开发环境,学习Linux开发环境的配置和使用,掌握Minicom串口终端的使用。
2.学习使用Vi编辑器设计C程序,学习Makefile文件的编写和armv4l-unkonown-linux-gcc编译器的使用,以及NFS方式的下载调试方法。
3.了解UP-NETARM2410-S嵌入式实验平台的资源布局与使用方法。
4.初步掌握嵌入式Linux开发的基本过程。
二、实验内容本次实验使用Redhat Linux 9.0操作系统环境,安装ARM-Linux的开发库及编译器。
创建一个新目录,并在其中编写hello.c和Makefile文件。
学习在Linux 下的编程和编译过程,以及ARM开发板的使用和开发环境的设置。
下载已经编译好的文件到目标开发板上运行。
三、预备知识C语言的基础知识、程序调试的基础知识和方法,Linux的基本操作。
四、实验设备及工具(包括软件调试工具)硬件:UP-NETARM2410-S嵌入式实验平台、PC机Pentium 500以上, 硬盘10G以上。
软件:PC机操作系统REDHAT LINUX 9.0+MINICOM+ARM-LINUX开发环境五、实验步骤1、建立工作目录[root@zxt smile]# mkdir hello[root@zxt smile]# cd hello2、编写程序源代码在Linux下的文本编辑器有许多,常用的是vim和Xwindow界面下的gedit等,我们在开发过程中推荐使用vim,用户需要学习vim的操作方法,请参考相关书籍中的关于vim的操作指南。
Kdevelope、anjuta软件的界面与vc6.0 类似,使用它们对于熟悉windows环境下开发的用户更容易上手。
实际的hello.c源代码较简单,如下:#include <stdio.h>main(){printf(“hello world \n”);}我们可以是用下面的命令来编写hello.c的源代码,进入hello目录使用vi命令来编辑代码:[root@zxt hello]# vi hello.c按“i”或者“a”进入编辑模式,将上面的代码录入进去,完成后按Esc键进入命令状态,再用命令“:wq”保存并退出。
nuc980 linux 编程NUC980是一种基于ARM架构的嵌入式处理器,适用于嵌入式Linux系统的开发。
下面是在NUC980上进行Linux编程的一些基本步骤:1. 准备开发环境:首先,需要安装交叉编译工具链,以便在主机上编译适用于NUC980的Linux内核和应用程序。
可以在NUC980官方网站上找到相关工具链的下载链接,并按照说明进行安装。
2. 下载内核源代码:到NUC980官方网站下载相应的Linux内核源代码,并解压到合适的目录中。
3. 配置内核:进入内核源代码目录,运行`make menuconfig`命令,此命令会打开一个配置界面,可以根据需求选择和配置内核功能,包括硬件驱动、网络协议、文件系统等。
4. 编译内核:运行`make`命令开始编译内核。
此过程可能需要一些时间,取决于计算机配置和源代码大小。
最终会生成一个内核镜像文件,一般存放在`arch/arm/boot`目录下。
5. 编写应用程序:使用交叉编译工具链,在主机上编写适用于NUC980的应用程序。
可以使用C语言或者其他支持的编程语言进行开发。
6. 交叉编译应用程序:使用交叉编译工具链对应用程序进行编译。
例如,如果使用的交叉编译工具链为`arm-linux-gcc`,可以运行`arm-linux-gccyour_program.c -o your_program`命令进行编译。
7. 将内核镜像和应用程序烧写到NUC980开发板:将编译好的内核镜像和应用程序烧写到NUC980开发板的存储介质上。
可以使用相应的工具或者方法来完成烧写。
8. 运行:将存储介质插入到NUC980开发板上,并启动开发板。
系统会加载内核,并执行应用程序。
这些是在NUC980上进行Linux编程的基本步骤。
具体的开发过程还可能涉及其他方面的内容,如设备驱动的编写、系统调试等,具体要根据具体的需求和实际情况来确定。
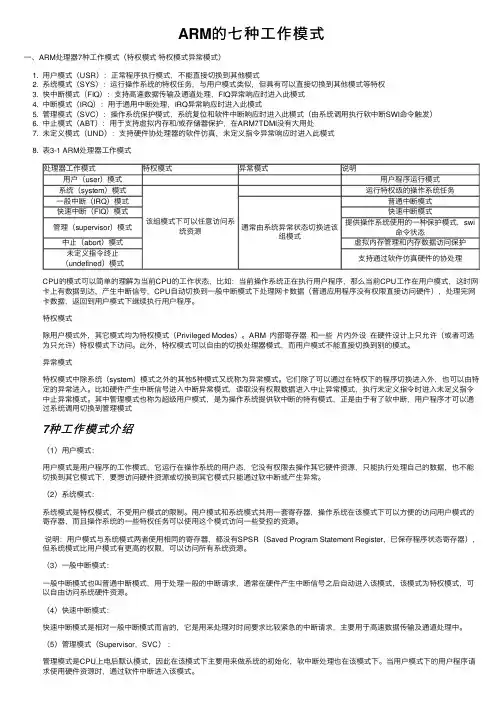
ARM的七种⼯作模式⼀、ARM处理器7种⼯作模式(特权模式特权模式异常模式)1. ⽤户模式(USR):正常程序执⾏模式,不能直接切换到其他模式2. 系统模式(SYS):运⾏操作系统的特权任务,与⽤户模式类似,但具有可以直接切换到其他模式等特权3. 快中断模式(FIQ):⽀持⾼速数据传输及通道处理,FIQ异常响应时进⼊此模式4. 中断模式(IRQ):⽤于通⽤中断处理,IRQ异常响应时进⼊此模式5. 管理模式(SVC):操作系统保护模式,系统复位和软件中断响应时进⼊此模式(由系统调⽤执⾏软中断SWI命令触发)6. 中⽌模式(ABT):⽤于⽀持虚拟内存和/或存储器保护,在ARM7TDMI没有⼤⽤处7. 未定义模式(UND):⽀持硬件协处理器的软件仿真,未定义指令异常响应时进⼊此模式8. 表3-1 ARM处理器⼯作模式处理器⼯作模式特权模式异常模式说明⽤户(user)模式⽤户程序运⾏模式系统(system)模式该组模式下可以任意访问系统资源运⾏特权级的操作系统任务⼀般中断(IRQ)模式通常由系统异常状态切换进该组模式普通中断模式快速中断(FIQ)模式快速中断模式管理(supervisor)模式提供操作系统使⽤的⼀种保护模式,swi命令状态中⽌(abort)模式虚拟内存管理和内存数据访问保护未定义指令终⽌(undefined)模式⽀持通过软件仿真硬件的协处理CPU的模式可以简单的理解为当前CPU的⼯作状态,⽐如:当前操作系统正在执⾏⽤户程序,那么当前CPU⼯作在⽤户模式,这时⽹卡上有数据到达,产⽣中断信号,CPU⾃动切换到⼀般中断模式下处理⽹卡数据(普通应⽤程序没有权限直接访问硬件),处理完⽹卡数据,返回到⽤户模式下继续执⾏⽤户程序。
特权模式除⽤户模式外,其它模式均为特权模式(Privileged Modes)。
ARM 内部寄存器和⼀些⽚内外设在硬件设计上只允许(或者可选为只允许)特权模式下访问。
此外,特权模式可以⾃由的切换处理器模式,⽽⽤户模式不能直接切换到别的模式。

OK335X-Linux用户手册第一章OK335X简介OK335X开发板基于TI AM335X处理器,运行主频最高720M,支持Linux,WinCE,Android三大操作系统,可用于工业产品设计。
OK335X有核心板和底板组成,核心板主要芯片有:CPU,NandFlash,Memory,PowerManage。
使用我们的核心板,只需要根据您的业务需求开发自己的底板,这样可加速您的产品上市时间,让您从平台搭建的复杂环境中脱离。
下面我们具体描述OK335X核心板和底板资源。
OK335X产品图片如下所示:核心板硬件资源:1CPU主频:720M(支持AM3352,AM3354,AM3356,AM3357,AM3358,AM3359)2NandFlash:256M(Micro SLC)3Memory:265M(Micro DDR2)4PowerManage IC:TPS65217B(TI AM335X专用电源IC)底板资源:14路串口(2个232电平,2个TTL电平,232电平已经使用DB9座子引出,其中COM0作为调试串口使用,注意:OK335X-V1底板中UART4暂时不能使用,下一硬件版本将修正这个问题)。
21路100M网口3音频接口(1路Phone输出,1路Line-in输入)41个SD卡接口56个用户按键63路I2C接口71个LCD接口(支持RGB888模式,支持电阻触摸和电容触摸。
默认标配7寸电阻屏)81路PWM接口,用于蜂鸣器测试。
91路Can接口101路SDIO接口11多路用户IO接口12四路USB2.0接口,一路USB2.0OTG(目前板子为一路USB Host接口,后续会增加到四路USB HUB)131路SPI接口148路AD(其中4路用于电阻触摸,1路用于滑动变阻器AD测试,其余3路通过插针引出,另外滑动变阻器端有跳线设置,通过跳线可以设置这路AD用于插针引出,还是用于可调电阻测试)15引出总线接口(缺省未焊接底座)161个RESET按钮,用于系统复位。
单片机开发与Linux开发针对ARM-Linux程序的开发,主要分为三类:应用程序开发、驱动程序开发、系统内核开发,针对不同种类的软件开发,有其不同的特点。
今天我们来看看ARM-Linux开发和MCU开发的不同点,以及ARM-Linux的基本开发环境。
1. ARM-Linux应用开发和单片机开发的不同这里先要做一个说明,对于ARM的应用开发主要有两种方式:一种是直接在ARM芯片上进行应用开发,不采用操作系统,也称为裸机编程,这种开发方式主要应用于一些低端的ARM芯片上,其开发过程非常类似单片机,这里不多叙述。
还有一种是在ARM芯片上运行操作系统,对于硬件的操作需要编写相应的驱动程序,应用开发则是基于操作系统的,这种方式的嵌入式应用开发与单片机开发差异较大。
ARM-Linux应用开发和单片机的开发主要有以下几点不同:(1)应用开发环境的硬件设备不同单片机:开发板,仿真器(调试器),USB线;ARM-Linux:开发板,网线,串口线,SD卡;对于ARM-Linux开发,通常是没有硬件的调试器的,尤其是在应用开发的过程中,很少使用硬件的调试器,程序的调试主要是通过串口进行调试的;但是需要说明的是,对于ARM芯片也是有硬件仿真器的,但通常用于裸机开发。
(2)程序下载方式不同单片机:仿真器(调试器)下载,或者是串口下载;ARM-Linux:串口下载、tftp网络下载、或者直接读写SD、MMC卡等存储设备,实现程序下载;这个与开发环境的硬件设备是有直接关系的,由于没有硬件仿真器,故ARM-Linux开发时通常不采用仿真器下载;这样看似不方便,其实给ARM-Linux的应用开发提供了更多的下载方式。
(3)芯片的硬件资源不同单片机:通常是一个完整的计算机系统,包含片内RAM,片内FLASH,以及UART、I2C、AD、DA等各种外设;ARM:通常只有CPU,需要外部电路提供RAM以供ARM正常运行,外部电路提供FLASH、SD卡等存储系统映像,并通过外部电路实现各种外设功能。
基础是你已经安装了Ubuntu,以及相关软件:超级终端minicom 及C/C++ compiler environment. 在Ubuntu上可使用下面终端命令安装minicoom和编译环境。
#sudo apt—get install minicom#sudo apt-get install build—essentialStep 1:将光盘 Linux 目录中的 arm—linux—gcc-4。
5.1—v6—vfp—20101103。
tgz 复制到 Lubuntu的当前目录下,执行解压命令:#sudo tar xvzf arm-linux-gcc-4.5.1-v6-vfp—20101103。
tgz –C /注意:C 后面有个空格,并且C 是大写的,它是英文单词“Change”的第一个字母,在此是改变目录的意思.这样 arm—linux-gcc 的相关文件就Copy到root用户的Opt目录中Step 2:把编译器路径加入系统环境变量,运行命令#sudo gedit ~/.bashrc编辑~/.bashrc 文件,注意“ bashrc ” 前面有一个“ . ”,修改最后一行为export PATH=$PATH:/opt/FriendlyARM/toolschain/4.5。
1/bin注意路径一定要写对,否则将不会有效。
如图,保存退出。
输入arm—linux—gcc –v,会出现如下信息,这说明交叉编译环境已经成功安装。
Step 3:编译链接 arm-qte-4。
7。
01) 解压包到自己制定的目录,例如 arm-qte-4.7。
02) 终端中运行。
/build-all(首先,注意不能双击运行,必须在终端中运行;其次,不使用 sudo)大约要安装2个小时当运行到出现如下提示后:cd src/tools/bootstrap/ && make -f Makefile installmake[1]:正在进入目录`/home/administrator/arm-qte-4.7。
arm,linux,电源管理解决方案篇一:ARM+Linux开发平台搭建详细步骤1、安装VMWare虚拟机(创建一台虚拟的电脑)并设置(1)用默认的步骤安装,并输入注册号(2)打开VMWare,点击文件-新建虚拟机接下去几步选择默认不停的点击“下一步”直到最后点击“完成”就行了2、在VMWare上定制安装Linux系统在虚拟机的CD中选择挂载硬盘上的Linux iso镜像文件点击开启此虚拟机,出现这个界面时,把鼠标点进虚拟机界面,选择第一项,并回车这里选择Skip这里选择忽略所有数据篇二:基于arm的智能家居系统方案基于ARM的智能家居系统设计方案1. 系统综述智能家居(Smart Home)是以住宅为平台,利用综合布线技术、网络通信技术、安全防范技术、自动控制技术、音视频技术将家居生活有关的设施集成,构建高效的住宅设施与家庭日程事务管理系统,以提升家居安全性、便利性、舒适性、艺术性,并实现环保节能的居住环境。
衡量一个智能家居系统的成功与否,并非仅仅取决于智能化系统的多少、系统的先进性或集成度,而是取决于系统的设计和配置是否经济合理并且系统能否成功运行,系统的使用、管理和维护是否方便,系统或产品的技术是否成熟适用,换句话说,就是如何以最少的投入、最简便的实现途径来换取最大的功效,实现便捷高质量的生活。
智能家居通常包括以下子系统:访问/控制系统通过电脑、手持终端等设备了解家中状况,对设备进行控制。
门禁系统门禁系统主要包括以下功能,室外监控功能:当门口有异响自动提示,能在家中或远程看到外面情况;拍照存档功能:当家中没人且有人按动门铃,便自动拍照存储,方面房屋主人查询;可视对讲功能:有客来访,可自由通话,并能看到外面情况,并能控制门锁的打开关闭;远程开锁功能:可以通过Internet 网,在任何地方开启家里的门锁。
视频监控系统视频监控的基本功能主要有:远程监控:可以进行实时本地和远程网络监控;远程控制:可以实现远程对设备的各种控制,可以对图像质量,分辨率,图像缩放进行操作,可以对云台的移动方向进行控制;视频存储:能够将视频数据本地存储,能够在任何时候对这些数据进行回放;移动侦测:布防后能够发现移动的物体并报警。
ARMDevelopmentStudio5⼊门教程ARM DS-5⼊门之概述关于 DS-5DS- 5是基于Linux系统和裸机嵌⼊式系统,涵盖了从启动代码和内核移植,应⽤程序和裸机调试的各个阶段,专业的软件开发解决⽅案。
它还包括性能分析。
DS-5 包括:l DS-5 Debugger.l DS-5 Eclipse是⼀种集成开发环境 (IDE),将编译和调试⼯具结合在⼀起。
l Real-Time System Models。
l ARM Streamline? 性能分析器。
l 专⽤的⽰例,包括应⽤程序和⽀持⽂档,以帮助您开始使⽤DS- 5⼯具。
l ⽤于开发裸机程序的Debughardware configuration utitlities。
l 开发嵌⼊式裸机程序的ARM编译⼯具。
l 开发启动代码和ARMLinux程序的GNU编译⼯具。
关于DS-5 EclipseDS-5 Eclipse是⼀种集成开发环境 (IDE),将ARM的编译和调试⼯具结合在⼀起。
它还包含开发ARM Linux GNU⼯具链。
DS-5 Eclipse 提供:项⽬管理l 可以执⾏各种项⽬任务,例如:增加或移除项⽬的⽂件和依赖,导⼊,导出,或创建项⽬,和管理编译选项。
编辑器l 可以读,写,或者修改 C/C++或ARM汇编语⾔源程序。
透视图和视图l 提供⾃定义视图, 菜单, 和⼯具栏以适应特定类型的环境。
DS-5 使⽤ C/C++ 和 DS-5 Debug 透视图。
关于 DS-5DebuggerDS-5 Debugger ⼀个⽀持端到端的ARM裸机和Real-TimeSystem Models (RTSMs)软件开发的图形化调试器。
全⾯和直观的试图⾮常易于调试Linux和裸机程序,包括同步源和反汇编,调⽤堆栈,内存,寄存器,表达式,变量,线程,断点,和跟踪。
使⽤Debug控制视图你可以在源码级或指令级单步执⾏并查看执⾏代码后其他视图更新的数据。
arm-linux学习笔记之minigui移植/u3/90065/showart_1793732.htmlminigui-1.6.10在s3c2410平台的移植开发板:SBC2410CPU:S3C2410linux-2.6.25.5fs:jffs2LCD:TFT320 X 240PC:fc8 linux-2.6.25.5(一)准备工作下载软件包libminigui-1.6.10.tar.gzmg-samples-1.6.10.tar.gzminigui-res-1.6.10.tar.gzmg-samples-str-1.6.2.tar.gz在/home/arm/创建一个minigui的目录,然后把这些载在的软件包放在该目录下,在分别解压缩。
再在/home/arm/minigui下创建一个miniguitmp的目录,用于安装编译以后的库文件。
(二)编译libminigui首先修改configure文件,在文件的开头加入交叉编译的路径CC=arm-9tdmi-linux-gnu-gccCPP=arm-9tdmi-linux-gnu-cppLD=arm-9tdmi-linux-gnu-ldAR=arm-9tdmi-linux-gnu-arRANLIB=arm-9tdmi-linux-gnu-ranlibSTRIP=arm-9tdmi-linux-gnu-strip然后执行[root@localhost libminigui-1.6.10]# ./configure --prefix=/home/arm/minigui/miniguitmp/ \--build=x86_64-linux \--host=arm-unknown-linux \--target=arm-unknown-linux[root@localhost libminigui-1.6.10]# make[root@localhost libminigui-1.6.10]# make install这个过程基本上不会有什么错误的执行make install的时候会把编译以后的资源安装到/home/arm/minigui/miniguitmp中,在这之下会有etc include lib usr几个目录产生。
linux下把某些开源库移植到arm开发板的基本流程
将某一开源库移植到ARM开发板的基本流程如下:
1. 了解ARM开发板的硬件平台参数(例如CPU架构、内存大小等)以及操作系统类型和版本(例如Linux)。
2. 下载所需的编译工具链,包括ARM交叉编译器、交叉编译时所需的库文件等。
3. 下载需要移植的开源库源代码。
4. 配置交叉编译器,将其与ARM开发板的硬件平台参数进行匹配。
5. 编译并链接代码,生成ARM平台可执行文件。
6. 将编译好的可执行文件拷贝到ARM开发板上进行测试,并根据需要进行调试和修改。
7. 重复上述步骤,直到移植的开源库能够在ARM开发板上正常运行。
需要注意的是,在移植过程中还需要考虑一些特殊情况,例如可能需
要修改源代码中的一些与硬件平台相关的部分,以确保其能够正确地运行在ARM开发板上。
ARM开发环境搭建实验报告一、实验目的本实验旨在帮助学生了解和掌握ARM开发环境的搭建过程,包括交叉编译环境的搭建、嵌入式系统开发环境的搭建、ARM Linux操作系统的搭建以及应用软件的开发与部署。
通过本次实验,学生将能够熟悉ARM开发的基本流程,为后续的ARM开发打下基础。
二、实验内容1. 开发环境介绍本部分将介绍ARM开发环境的基本概念、组成和搭建流程。
重点讲解ARM架构的特点、开发板的选择以及开发工具链的组成。
通过本部分的学习,学生将能够对ARM开发环境有基本的了解和认识。
2. 交叉编译环境搭建交叉编译是指在一种平台上生成另一种平台上的可执行文件。
本部分将介绍如何搭建ARM交叉编译环境,包括交叉编译工具链的安装、配置和使用。
同时,学生将通过实践操作,掌握交叉编译的基本方法。
3. 嵌入式系统开发环境搭建嵌入式系统是指专为特定应用而设计的计算机系统。
本部分将介绍如何搭建嵌入式系统开发环境,包括开发板的连接、调试工具的安装以及嵌入式操作系统的选择和烧写。
通过本部分的学习,学生将能够掌握嵌入式系统开发的基本流程。
4. ARM Linux 操作系统搭建ARM Linux操作系统是一种针对ARM架构的开源操作系统。
本部分将介绍如何搭建ARM Linux操作系统,包括操作系统的下载、烧写以及启动过程。
同时,学生将学习如何在ARM Linux上安装软件、配置网络等操作,以便进行后续的应用软件开发。
5. 应用软件开发与部署本部分将介绍如何进行ARM应用软件开发与部署。
首先,学生将学习如何使用交叉编译工具链编译应用程序;其次,学生将学习如何将应用程序部署到ARM设备上,并进行测试和调试。
通过本部分的学习,学生将能够掌握ARM应用软件开发的整个流程。
三、实验步骤1. 安装交叉编译工具链,并配置环境变量;2. 连接开发板,并安装调试工具;3. 下载并烧写嵌入式操作系统;4. 安装ARM Linux操作系统;5. 编写应用软件源代码;6. 使用交叉编译工具链编译应用软件;7. 将应用软件部署到ARM设备上;8. 进行测试和调试。