写第一个STM32程序常见错误及解决方法
- 格式:doc
- 大小:179.00 KB
- 文档页数:8
STM32 单片机常见的工作异常现象分析及解决方案贴了两块样板,烧写同样的固件。
其中一块工作正常,但是另外一块出现了很奇怪的现象:在线调试正常;每次烧写完后工作正常;重新上电有时候工作正常,有时候工作不正常;工作不正常时,按下复位按键,恢复正常。
工作异常现象:main 函数中的系统运行指示灯不闪烁,但是初始化过程中点的一个灯是亮的!说明程序运行一段时间后,不工作了。
由于在线调试模式,板子工作正常,无法通过在线调试的方式判断程序运行的异常状态。
分析可能的原因:1、初始化过程中,程序陷入死循环。
但程序初始化过程中,没有while (1)死循环的代码。
2、板子上电后不断复位,导致无法进入main 函数中的while(1)循环。
问题查找:硬件:1、确认BOOT0 管脚接10kΩ欧电阻下拉到地;2、RC 上电延时复位电路中,R 为10kΩ,C 由0.1uF 改为10uF,现象依旧;3、MCU 3.3V 电源纹波很小,排除电源问题。
好像从硬件上查不出什幺问题。
只能从板子上唯一点亮的灯下手了。
软件:1、好像跟硬件复位没什幺关系,为了确认板子是不是在不停复位,在点亮的那个灯前加了100ms 延时,如果是在复位,那灯就应该不停闪烁。
但那个灯还一直是亮的,说明是程序运行出错,不运行了。
2.不断修改led 灯在初始化代码中的位置,最终定位到导致运行出错的代码:配置一个GPIO 为外部中断,跳变沿触发,上拉。
把上拉改为NOPULL,工作一切正常。
问题定位:配置为外部中断的GPIO 悬空导致。
之前工作正常的样板是一直有连接到那个IO 脚的外接模块,这个工作不正常的没有接,导致IO 管脚电平不确定。
由于电平的不确定,在初始化的瞬间有一个跳变沿,导致程序进入外部中断服务函数。
在中断服务函数中,要读取一个定时器的寄存器的值,但是要读取的定时器可能还没有完成初始化,导致读取失败,程序运行异常。
解决办法:1、PULL 模式有PULLRISING 改为NOPULL;2、timer 在这个外部中断之前进行初始化。
stm32 error_handler 处理技巧文章题目: STM32 error_handler 处理技巧导言:STM32是一款常用的嵌入式系统开发板,无论是初学者还是经验丰富的嵌入式开发者,都有可能在使用中遇到各种错误,并且经常需要处理这些错误。
本文将详细介绍STM32 error_handler处理技巧,向读者展示如何高效地处理错误,提高嵌入式系统的稳定性和可靠性。
第一部分: STM32 error_handler 概述1.1 简介当STM32系统运行过程中发生错误时,MCU会通过中断或者其他方式发送错误信号。
此时,error_handler函数会被调用,它的主要责任是打印错误信息和采取相应措施,以防止错误的进一步蔓延和导致系统崩溃。
1.2 error_handler 原理error_handler函数是一段特定的代码段,它会在系统发生错误时被调用。
该函数不仅负责处理错误,还需要将错误信息传递给开发者。
主要的目标是根据错误类型采取适当的措施,并尽可能地恢复系统的正常运行。
第二部分: STM32 error_handler 处理方法2.1 确定错误类型在处理错误之前,首先需要确定错误的类型。
这可以通过查看相关文档和参考手册来实现。
常见的错误类型包括内存溢出、外设故障、软件bug 等。
通过确定错误类型,可以更加准确地采取相应的解决措施。
2.2 错误信息打印一旦确定了错误类型,就需要将错误信息打印出来,以便更好地排查和修复错误。
在错误信息中应该包含当前错误发生的位置、错误的原因和可能的解决方案。
这些信息可以通过串口输出,或者使用调试工具实现。
2.3 采取适当的措施根据错误类型和错误信息,选择适当的措施来处理错误。
这些措施可能包括重启系统、重新初始化外设、软件Bug修复等。
确保在采取措施之前备份关键数据,以防止数据丢失和其他未知问题发生。
第三部分: STM32 error_handler 最佳实践3.1 检查错误处理代码编写错误处理代码时,务必对其进行仔细检查和测试。
STM32 新手常见的一个错误并给出解决方法STM32 新手常见的一个错误并给出解决方法程序错误解决:1...\OutProj\test.axf: Error: L6218E: Undefined symbol SystemInit(referred from startup_stm32f10x_md.o).这个错误很明显提示我们错误就是:没有定义SystemInit这个符号,然后参考startup_stm32f10x_md.o但是这个是由startup_stm32f10x_md.s 生成的,一般.o 文件是由.c 或者.s 生成当找到错误的原因,我们就可以进去startup_stm32f10x_md.s 文件中找到定义SystemInit 这个文件。
在此文件里面可以找到SystemInit 的所在:Reset handlerReset_Handler PROCEXPORTReset_Handler [WEAK]IMPORT __mainIMPORT SystemInit LDR R0, =SystemInit BLX R0LDR R0, =__mainBXR0ENDP原来在复位中断服务函数里面,调用了SystemInit 这个函数,而这个函数在.s 文件里面没有定义。
所以解决的办法有下面三个1.在外部(其他任何.c 文件里面)定义SystemInit 这个函数,哪怕是个空函数也可以。
2.把IMPORT SystemInitLDR R0, =SystemInitBLXR0这两句话注释掉或者去掉。
3.可以添加system_stm32f10x.c 这个库文件,到工程里面,也可以解决。
但是第三种方法比较麻烦,因为如果你自己定义了一些函数,也许和system_stm32f10x.c 有冲突那么就要改成一样的函数名字或者变量名。
不推荐使用这种方法。
4.当然你也可以重新编写startup_stm32f10x_md.s 这个文件。
最近一段时间一直在学习STM32和ucos的移植,使用的开发环境是keil u4版本。
仿真器是80元买的jlink。
在学习了STM32固件库和ucos内核与移植相关的程序之后,写了一个流水灯程序,准备下载到板子上看看情况。
哪知程序还没有下进去,在debug时,keil 的错误提示到:Error: Flash download failed-"Cortex-M3"感觉这么错误很普遍,也是初学者常常遇到的错误,下面我就将这个错误产生的原因和解决方法赘述一下:错误产生的原因和分析,解决。
首先,我们看到提示信息是有关flash的,那么我们来查看一下STM32F103XB的数据手册关于这部分的描述(我使用的芯片是STM32F103RB,有128kflash。
)知道了原来flash在此芯片中的地址是从0x0800 0000到0x0801 FFFF 这段,也就是说这段存储空间是用来存储程序。
而在STM32芯片方面,它又有一个规则,那就是芯片启动的方式,如果你把程序下载到了flash中,那么在复位芯片之前或者通电之前,要将boot0,boot1两个引脚拉到高电平,这样在启动时,芯片初始化之后,运行程序代码才是从flash 地址开始执行的。
于是,我们来查看一下keil中仿真器的设置,是不是正确,设置的选项在keil软件的project-options for target中的Utilities中,先来查看下仿真器是否选对,然后点settings,弹出如下菜单:查看一下programming Algorism 下的flash地址是否正确,如果不正确则会引起开始那个错误的提示信息,如果正确还是出现那个错误,那么按照官方给的解决方法是,删除现有的flash 地址,重新配置一下,记得要选对芯片型号和地址空间。
配置好之后点击OK退出。
然后再查看一下Target中的地址,是否跟你重新添加的一致,如果一致,那么点OK退出。
stm32error_handler处理技巧错误处理是嵌入式系统开发中非常重要的一部分,它帮助开发者在出现异常情况时能够提供适当的处理方式,避免系统崩溃或者产生不可预知的结果。
在STM32系列中,使用Error_Handler函数来处理错误是常见的做法。
下面我将为你详细介绍一些STM32的error_handler处理技巧。
1.全局异常处理:在STM32中,可以通过重写`Error_Handler(`函数来实现全局异常处理。
该函数默认定义在文件`stm32l4xx_hal.c`中。
在该函数中,你可以根据不同的错误类型进行相应的处理。
例如,在发生硬件错误时,可以通过重启系统来恢复正常操作,或者发送错误信息到串口输出等。
以下是一个例子,展示了如何在发生硬件错误(比如硬件初始化失败)时重启系统:```cvoid Error_Handler(void)while(1)HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET); // 点亮LED灯HAL_Delay(500); // 延时500msHAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET); // 熄灭LED灯HAL_Delay(500); // 延时500msNVIC_SystemReset(; // 重启系统}```你可以根据实际需求,在需要处理的错误类型下添加相应的代码。
2.中断异常处理:在STM32中,中断异常也是常见的错误类型。
当中断异常发生时,你也可以通过重写`Error_Handler(`函数来进行处理。
例如,你可以在该函数中记录并输出错误日志,以便后期分析和调试。
以下是一个示例代码,展示了如何在发生中断异常时记录错误日志到串口输出:```cvoid Error_Handler(void)printf("Error: Interrupt Exception Occurred!\n");printf("Error Details: %s\n", error_message); // 这里需要自己定义error_message变量while(1) {} // 系统停止在此处```你可以根据实际需求,在不同的中断异常发生时添加相应的处理代码。
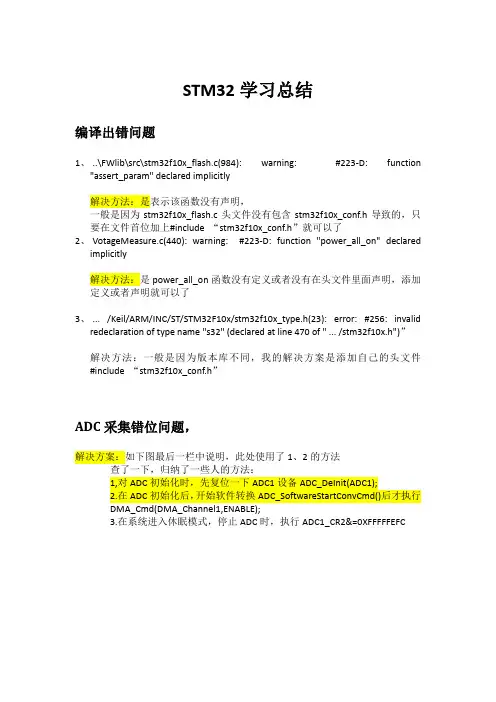
STM32学习总结编译出错问题1、..\FWlib\src\stm32f10x_flash.c(984): warning: #223-D: function"assert_param" declared implicitly解决方法:是表示该函数没有声明,一般是因为stm32f10x_flash.c头文件没有包含stm32f10x_conf.h导致的,只要在文件首位加上#include “stm32f10x_conf.h”就可以了2、VotageMeasure.c(440): warning: #223-D: function "power_all_on" declaredimplicitly解决方法:是power_all_on函数没有定义或者没有在头文件里面声明,添加定义或者声明就可以了3、... /Keil/ARM/INC/ST/STM32F10x/stm32f10x_type.h(23): error: #256: invalidredeclaration of type name "s32" (declared at line 470 of " ... /stm32f10x.h")”解决方法:一般是因为版本库不同,我的解决方案是添加自己的头文件#include “stm32f10x_conf.h”ADC采集错位问题,解决方案:如下图最后一栏中说明,此处使用了1、2的方法查了一下,归纳了一些人的方法:1,对ADC初始化时,先复位一下ADC1设备ADC_DeInit(ADC1);2.在ADC初始化后,开始软件转换ADC_SoftwareStartConvCmd()后才执行DMA_Cmd(DMA_Channel1,ENABLE);3.在系统进入休眠模式,停止ADC时,执行ADC1_CR2&=0XFFFFFEFC之后的以前的。
stm32学习之错误汇总(仅仅就我学习过程中所遇到的)1.Error:Flash Download Failed-"Cortex-M3"出现这处问题通常是MDK中的Flash的编程算法没有配置或没有配置正确,通俗的讲,就是我们没有配置好下载的环境,导致程序⽆法下载在这⾥,主要指的是没有添加cpu⽀持的flash错误点击mdk中的对进⾏配置,点击flashdownload,点击add 添加cpu⽀持的flash,根据⾃⼰的stm32来配对,我的是stm32f10x high-density flash 512k,此条错误解决2.程序编译成功,下载成功,但是开发板不显⽰效果mdk没有对j-link进⾏匹配点击mdk中的,点击debug,选择j-link/j-trace cortex,程序下载成功,效果实现3.Error:target dll has been cancelled.debugger aborted表⾯意思⽬标DLL已经cancelled.debugger中⽌可能是硬件仿真未匹配,解决1. 7⽉28⽇,不过奇怪的是昨天我把这⼀栏改了的,但今天重新开程序,它⼜变成了4.7.29学习LCD -FSMC彩屏显⽰的时候出现passing 'char[16]' to parameter of type 'const u8*' (aka 'const unsigned char*') converts between pointers to interger types with different signs 相关的类似报错的原因就是输⼊显⽰屏的字符串变量⼀定要是char,不能是u8,unsigned char我把所有相关的函数变量参数的类型改成char就解决对了问题.5.8.3学习定时APP\瀹氭椂鍣╘time.h(4): warning: #1295-D: Deprecated declaration time_init - give arg types使⽤函数前⼀定要声明APP\瀹氭椂鍣╘time.c(23): warning: #1-D: last line of file ends without a newlineAPP \瀹氭椂鍣╘time.c(23):警告:#⼀维:⽂件的最后⼀⾏没有换⾏符结束。
一、在“Debug选项卡”下设置好仿真器的类型后,下载程序时却提示“No ULINK Device found.”解决办法:Keil MDK默认使用ULINK仿真器下载程序,在“Utilities选项卡”下把编程所使用的仿真器改为相应的类型即可。
二、编译工程时提示如下信息:main.axf: Error: L6218E: Undefined symbol __BASEPRICONFIG (referred from stm32f10 x_nvic.o).main.axf: Error: L6218E: Undefined symbol __GetBASEPRI (referred from stm32f10x_nvi c.o).main.axf: Error: L6218E: Undefined symbol __RESETFAULTMASK (referred from stm32f 10x_nvic.o).main.axf: Error: L6218E: Undefined symbol __RESETPRIMASK (referred from stm32f10x _nvic.o).main.axf: Error: L6218E: Undefined symbol __SETFAULTMASK (referred from stm32f10x _nvic.o).main.axf: Error: L6218E: Undefined symbol __SETPRIMASK (referred from stm32f10x_n vic.o).解决办法:工程缺少“cortexm3_macro.s”文件,把cortexm3_macro.s和STM3210x.s全部添加到工程即可。
三、调试器不能连接到STM32的问题与解决办法很多人都碰到过调试器不能连接到STM32的问题,不管是IAR的J-Link还是Keil的ULink,或者是ST的ST-Link。
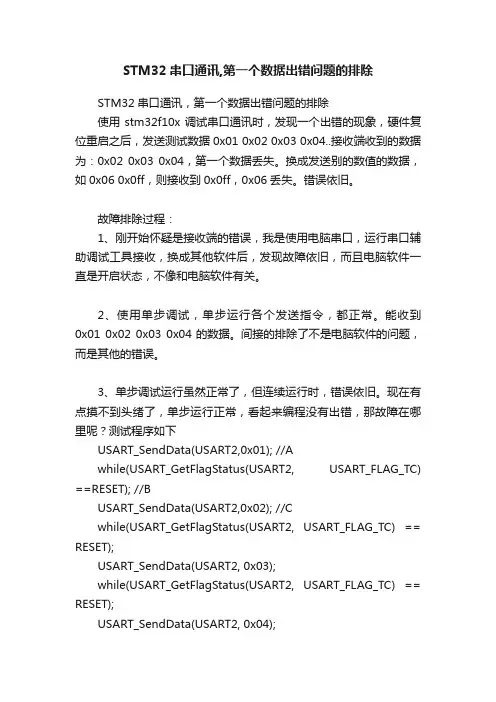
STM32串口通讯,第一个数据出错问题的排除STM32串口通讯,第一个数据出错问题的排除使用stm32f10x调试串口通讯时,发现一个出错的现象,硬件复位重启之后,发送测试数据0x01 0x02 0x03 0x04..接收端收到的数据为:0x02 0x03 0x04,第一个数据丢失。
换成发送别的数值的数据,如0x06 0x0ff,则接收到0x0ff,0x06丢失。
错误依旧。
故障排除过程:1、刚开始怀疑是接收端的错误,我是使用电脑串口,运行串口辅助调试工具接收,换成其他软件后,发现故障依旧,而且电脑软件一直是开启状态,不像和电脑软件有关。
2、使用单步调试,单步运行各个发送指令,都正常。
能收到0x01 0x02 0x03 0x04的数据。
间接的排除了不是电脑软件的问题,而是其他的错误。
3、单步调试运行虽然正常了,但连续运行时,错误依旧。
现在有点摸不到头绪了,单步运行正常,看起来编程没有出错,那故障在哪里呢?测试程序如下USART_SendData(USART2,0x01); //Awhile(USART_GetFlagStatus(USART2, USART_FLAG_TC) ==RESET); //BUSART_SendData(USART2,0x02); //Cwhile(USART_GetFlagStatus(USART2, USART_FLAG_TC) == RESET);USART_SendData(USART2, 0x03);while(USART_GetFlagStatus(USART2, USART_FLAG_TC) == RESET);USART_SendData(USART2, 0x04);while(USART_GetFlagStatus(USART2, USART_FLAG_TC) == RESET);4、猜测,也许是因为某个特殊原因,使第二个数据覆盖了首个数据,使得首个数据丢失。
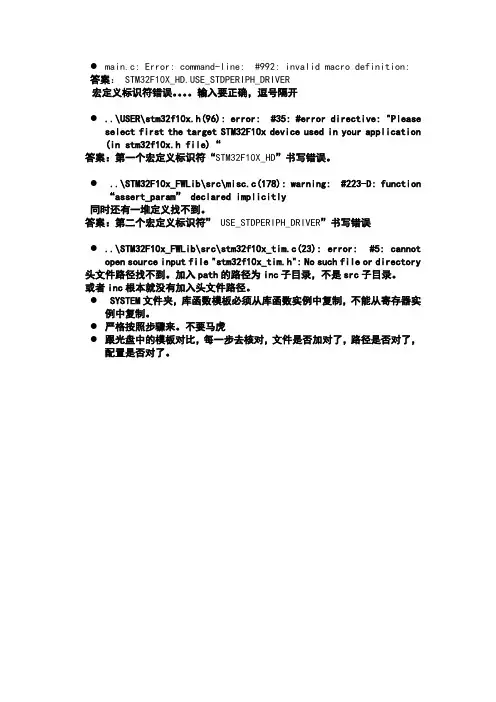
●main.c: Error: command-line: #992: invalid macro definition: 答案: STM32F10X_E_STDPERIPH_DRIVER宏定义标识符错误。
输入要正确,逗号隔开●..\USER\stm32f10x.h(96): error: #35: #error directive: "Pleaseselect first the target STM32F10x device used in your application (in stm32f10x.h file)“答案:第一个宏定义标识符“STM32F10X_HD”书写错误。
● ..\STM32F10x_FWLib\src\misc.c(178): warning: #223-D: function“assert_param” declared implicitly同时还有一堆定义找不到。
答案:第二个宏定义标识符” USE_STDPERIPH_DRIVER”书写错误●..\STM32F10x_FWLib\src\stm32f10x_tim.c(23): error: #5: cannotopen source input file "stm32f10x_tim.h": No such file or directory 头文件路径找不到。
加入path的路径为inc子目录,不是src子目录。
或者inc根本就没有加入头文件路径。
● SYSTEM文件夹,库函数模板必须从库函数实例中复制,不能从寄存器实例中复制。
●严格按照步骤来。
不要马虎●跟光盘中的模板对比,每一步去核对,文件是否加对了,路径是否对了,配置是否对了。
stm32error_handler处理技巧在使用STM32进行开发时,可能会遇到各种错误。
当出现错误时,通常需要使用错误处理器(error handler)来处理这些错误。
错误处理器是一个特殊的函数,用于捕获和处理发生的错误。
在STM32上,错误处理器的实现可以有多种方式。
下面是一些错误处理的技巧,可以帮助您更好地处理STM32上的错误。
1. 使用断言(assertion):断言是一种在代码中插入的检查,用于验证程序的逻辑和状态是否正确。
可以使用它来检查指针是否为空、变量是否处于预期范围内等。
当断言失败时,可以在错误处理器中打印错误信息或执行其他相关操作。
2. 使用错误码(error code):为不同类型的错误定义错误码,可以方便地识别错误类型。
当发生错误时,错误处理器可以根据错误码执行相应的操作,例如打印错误信息、返回错误码等。
3. 使用异常处理:异常是一种在程序运行时发生的错误,可以用于捕获并处理异常情况。
对于STM32,可以使用CMSIS库提供的异常处理函数,例如HardFault_Handler(、BusFault_Handler(等。
当发生异常时,可以在异常处理器中执行一些操作,例如打印异常信息、保存堆栈信息等。
4. 使用断点(breakpoint):在调试过程中,可以使用断点来暂停代码的执行,以便检查变量的值和程序的状态。
在错误处理器中设置断点可以方便地跟踪错误发生的位置和上下文信息。
5.记录错误信息:在错误处理器中,可以通过打印日志信息或将错误信息保存到外部存储器等方式记录错误信息。
这有助于分析错误发生的原因和调试错误的源头。
6.打印调试信息:在错误处理器中,可以使用串口或其他通信方式将调试信息输出到终端或其他设备。
这可以让开发者更方便地了解错误发生的原因和上下文信息。
7.使用硬件故障检测:一些STM32芯片提供了硬件故障检测功能,可以检测和处理硬件故障,例如电源异常、时钟失频等。
写第⼀个STM32程序常见错误及解决⽅法1.启动KEIL,创建⼯程以后,先⽤创建⽂件,然后什么也不⼲,直接点击保存,保存到你的⼯程⽂件夹下⾯,命名为main.c(其他也可以,命名为main.c是为了⽅便你同其他的C⽂件快速区分开来)。
然后输⼊以下⼏⾏代码:#include "stm32f10x.h"void main(void){}然后点击Build,会有以下报错信息:C:\Keil\ARM\Inc\ST\STM32F10x\stm32f10x.h(96): error: #35: #error directive: "Please select first the target STM32F10x device used in your application (in stm32f10x.h file)"这是说stm32f10x.h中要求⼯程在预编译时通过⼀个字符串,来识别所⽤的芯⽚FLASH⼤⼩,然后确定头⽂件中哪些语句有效。
ST把STM32按FLASH⼤⼩尺⼨来归类的,具体在STM32参考⼿册⾥⾯有。
解决办法:请点击中的打开的界⾯中选到选项,然后Define⾥⾯输⼊STM32F10X_MD(因为这个实验板上⽤的STM32F103C8T6对应这个“中等容量的FLASH”,换做其他芯⽚不⼀定是这个字符串),如图:然后点击OK。
再,然后会出第⼆个错误:C:\Keil\ARM\Inc\ST\STM32F10x\stm32f10x.h(8297): error: #5: cannot open source input file "stm32f10x_conf.h": No such file or directory这说明⽂件包含的路径没有设置好。
解决办法:按上⾯所述选到选项。
然后在下选择,再点击,然后打开⽬录找到固件库⾥⾯的这个⽂件(最好能把这个⽂件夹复制出来保存到⼀个纯英⽂路径的⽬录下),然后选择中⾥⾯的inc⽂件夹,然后再如法炮制选中⾥⾯的src⽂件夹。
STM32新手常见的一个错误并给出解决方法在使用STM32微控制器进行开发时,新手常常会遇到一些常见的错误。
以下是一些常见错误以及对应的解决方法,帮助新手更好地克服这些问题。
1.芯片未正确连接:通常情况下,STM32芯片应与开发板正确连接。
新手可能会出现错误的连接方式,例如将芯片倒置或错位连接。
解决这个问题的方法是仔细查看芯片的引脚图并确保正确地连接所有的引脚。
2.引脚配置错误:STM32微控制器具有多功能引脚,可以根据需要进行不同功能的配置。
新手可能会错误地配置引脚,导致功能无法正常工作。
解决这个问题的方法是仔细阅读芯片的数据手册,以确定正确的引脚功能和配置设置。
3.时钟配置错误:STM32微控制器依赖于准确的时钟源以确保正常运行。
新手可能会忽视时钟配置,导致系统无法启动或无法正常工作。
解决这个问题的方法是仔细配置时钟源,并确保时钟频率与所需的系统时钟频率相匹配。
4.软件驱动错误:在使用STM32微控制器进行开发时,需要正确的软件驱动程序来控制硬件功能。
新手可能会遗漏或错误地使用关键的驱动程序,导致无法实现预期的功能。
解决这个问题的方法是仔细阅读相关的软件库文档,并确保正确使用所有必需的软件驱动程序。
5.中断配置错误:STM32微控制器支持多种中断,并需要正确配置以实现正确的中断处理。
新手可能会忽略或错误地配置中断,导致系统无法正确响应中断事件。
解决这个问题的方法是仔细阅读关于中断配置和处理的文档,并确保正确配置所有中断。
6.电源和电源管理问题:STM32微控制器需要稳定和适当的电源供应以确保正常运行。
新手可能会遇到电源不稳定或不足的问题,导致系统无法正常工作。
解决这个问题的方法是确保提供稳定的电源,并使用适当的电源管理技术,例如使用电容和稳压器等来提供稳定和适当的电源。
7.调试问题:在使用STM32微控制器进行开发时,调试是非常重要的。
新手可能会遇到调试问题,例如无法正确读取或显示调试信息。
STM32的调试方式更新程序仿真以及补救措施STM32是一款常见的嵌入式微控制器系列,具有强大的性能和丰富的外设接口。
在使用STM32进行开发时,常常需要进行调试、更新程序和仿真操作,并且可能会遇到一些问题。
下面将介绍STM32的调试方式、更新程序、仿真以及补救措施。
一、调试方式:1. JTAG/SWD调试:STM32微控制器通常配备了JTAG/SWD接口,可以通过调试器连接到计算机上,通过调试器与IDE(如Keil、IAR)或开源工具(如OpenOCD)进行连调,实现程序的调试、单步执行等功能。
常见的调试器有ST-LINK、JLINK等,可以通过USB接口与计算机连接。
这种调试方式可以方便地查看寄存器的值、查看和修改内存中的数据等,非常适合对程序进行低层次的调试和优化。
2. printf输出调试:在没有调试器的情况下,我们可以通过串口打印调试信息。
STM32通常具有多个串口,可以通过配置串口参数,并使用库函数printf将调试信息发送到串口进行观察。
这种调试方式适用于获取程序中一些阶段的状态信息,但并不能进行实时的断点调试和单步执行。
二、更新程序:1.串口更新程序:将更新程序(一般是BIN或HEX格式)通过串口发送到STM32,然后利用STM32的串口接收中断或DMA功能,将接收到的数据存储到内存中,再执行程序更新的过程。
这种方式操作简单,适用于在现有系统中更新程序,但更新速度相对较慢。
2. USB DFU更新程序:STM32支持通过USB接口进行固件升级(DFU)。
通过配置USB接口参数,将更新程序发送到STM32中的内存。
然后通过执行Firmware Upgrade(固件升级)的指令,将更新程序写入到FLASH中并执行更新。
使用USBDFU更新程序可以快速方便地进行程序的更新,适用于大批量的固件升级。
三、仿真:在进行STM32程序开发的过程中,常常需要进行仿真操作,以验证程序的正确性和功能的实现。
STM32编译报错修改方法************************************************keil中警告:invalid multibyte character sequence************************************************方案一:#pragma diag_suppress 870用这个办法,这个可以解决,关闭方案二:是数组里面是汉字就会出现应该是数据类型定义的问题。
检查下两种类型的差别,修正下变量类型。
应该是数据类型定义的问题。
问题找到了,不知怎么搞得,这个字摸的.c文件中的汉字编码和其他文件的不一样,一般在keil中删除一个汉字都要按退格键两下才删除一个汉字,这个文件中居然按一下就删掉了,也没出现乱码字样。
重新建了一个.c文件,把代码拷过去,然后就没再报错了~************************************************line 10: warning: function declared implicitly 函数的隐式声明************************************************这是由于没有声明函数原型造成的。
__DSB 函数在声明处需要加上extern修饰符把,否则编译器会认为的重定义。
【note】stm32 keilMDK出现warning:function XX declared implicitly .2014-08-26 14:50 985人阅读评论(0) 收藏举报warning: #223-D: function "CLR_TX_DA TA" declared implicitly解决方法。
以上面错误提示为例:1 找到定义函数CLR_TX_DA TA()的源文件,这里假设在a.c 中;2 在a.h 中最后声明一下CLR_TX_DATA(),即添加(假设此函数无返回值无参数)void CLR_TX_DA TA(void);3 再次编译刚才的warning 即可消失。
STM32学习总结编译出错问题1、..\FWlib\src\stm32f10x_flash.c(984): warning: #223-D: function"assert_param" declared implicitly解决方法:是表示该函数没有声明,一般是因为stm32f10x_flash.c头文件没有包含stm32f10x_conf.h导致的,只要在文件首位加上#include “stm32f10x_conf.h”就可以了2、VotageMeasure.c(440): warning: #223-D: function "power_all_on" declaredimplicitly解决方法:是power_all_on函数没有定义或者没有在头文件里面声明,添加定义或者声明就可以了3、... /Keil/ARM/INC/ST/STM32F10x/stm32f10x_type.h(23): error: #256: invalidredeclaration of type name "s32" (declared at line 470 of " ... /stm32f10x.h")”解决方法:一般是因为版本库不同,我的解决方案是添加自己的头文件#include “stm32f10x_conf.h”ADC采集错位问题,解决方案:如下图最后一栏中说明,此处使用了1、2的方法查了一下,归纳了一些人的方法:1,对ADC初始化时,先复位一下ADC1设备ADC_DeInit(ADC1);2.在ADC初始化后,开始软件转换ADC_SoftwareStartConvCmd()后才执行DMA_Cmd(DMA_Channel1,ENABLE);3.在系统进入休眠模式,停止ADC时,执行ADC1_CR2&=0XFFFFFEFC之后的以前的。