自动扶梯与自动人行道构造
- 格式:ppt
- 大小:7.96 MB
- 文档页数:144
第八章自动扶梯与自动人行道本章重点:1、自动扶梯的发展及分类2、自动扶梯的主要参数3、自动扶梯的基本构造4、自动扶梯的安全操作与使用自动扶梯(Escalator)=梯级(法语scala)+电梯(英语Elevator)1859年,美国的内森.爱米斯发明了一种“旋转式梯级”的自动扶梯。
在旋转皮带上安装梯级型木板,人到顶上跳下来。
现在看起来可笑,但给后人很大启示。
1892年,乔治.韦勒发明了移动楼梯,并有与现在类同的活动扶手带(但需加油),其重要性可与奥的斯发明的安全钳相媲美。
1899年,杰斯.雷诺发明了用木梳结构制成运动踏面的倾斜式(30°)“自动人行道”,但出口无梳齿板,并于1900年将样机设于纽约市的高架火车站。
一、自动扶梯发展史木梳齿板1899年,西伯格购买了韦勒的活动扶手专利,且与奥的斯公司合作制造了两台世界上最早的梯级式自动扶梯。
“Escalator”一词同时产生,otis将该词登记了商标。
一直延续到1930年,A17.1安全规范将“Escalator”作为公共用词为止(A17.1首版是1921年)。
1911年,otis公司获得了Reno公司,成为世界上唯一制造自动扶梯的公司。
1920年,扶梯中组合了水平梯级、梳齿板及免润滑的扶手带新专利,从而使扶梯真正的实用化,此后的两年中otis销售了350多台。
1950年,有了玻璃扶手支撑1974年,由Luna StaircaseCompany试制了“HelicalEscalator”(螺旋型自动扶梯)1985年,由Mitsubishi推出了“ Spiral Escalator”2000年,由Hitachi制作推出了薄型自动扶梯,机房高从1000mm减至555mm,倾斜段高度减去300mm。
一、自动扶梯发展史什么是自动扶梯?自动扶梯是一种可连续运输的客运工具。
它有什么特点呢?★能同时运送乘客;★输送能力大,且提升高度高;★运送客流量均匀,能连续地运送乘客;★可上下逆转。




自动扶梯与自动人行道第一部分设备原理(组成)分析 - G一、种类自动扶梯和自动人行道的种类主要是按照运送乘客的载体形式来区分,有踏板式自动扶梯和踏板式自动人行道以及胶带式自动人行道。
踏板式是指乘客站立的踏面为金属或其他材料制作的表面带齿槽的板块。
胶带式是指乘客站立的踏面为表面覆有橡胶层的连续钢带的自动人行道。
胶带式自动人行道运行平稳,但制造和使用成本较高,适用于长距离速度较高的自动人行道。
目前多见的是踏板式自动人行道。
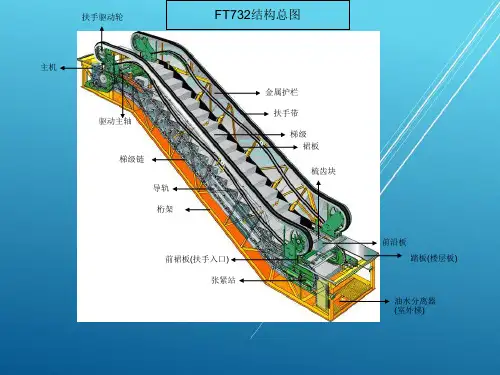
二、形式1、按载重区分:重载型和普通型(苗条型)2、按结构区分:直线型和曲线型3、按牵引方式区分:链条式和齿条式4、按安装场所区分:户内式和户外式5、按驱动装置位置区分:有端部驱动和中间驱动三、组成1、按装配方式由上驱动端站、倾斜段和下回转端(下涨紧段)站组成2、按工作系统和结构装置由以下系统、装置组成:⑴桁架,由上弦杆、腹杆、下弦杆和底板等组成。
⑵梯路系统,由梯级、牵引链条及链轮组成。
⑶动力系统,包括电动机、减速装置、制动器及中间传动环节等组成。
⑷梯路张紧装置,由鱼形板及张紧弹簧等组成。
⑸扶手系统,由扶手带、导向装置、驱动装置、张紧装置、护壁板、围裙版、内盖板以及外盖板和围板等组成。
⑹梳齿板,由梳齿、梳齿板以及支架组成。
⑺电气系统,由拖动及控制系统组成。
⑻安全保护系统,由电气安全装置、含有电子回路的安全电路及含电子元件和(或)可编程电子系统的安全电路组成。
四、规格、参数及指标1、型号,可以用来区别适用的场所以及最大的提升高度2、倾斜角,根据建筑物预留空间来选择,由跨距和提升高度的综合数据进行确定。
3、梯级宽度,根据使用场所预留空间尺寸以及流量确认。
4、扶手类型,按照扶梯的用途进行选择。
5、提升高度/长度(m),根据建筑物预留空间来选择,由跨距和倾斜角度的综合数据进行确定。
6、速度(m/s),根据提升高度以及使用场所的流量选择7、适用范围,对提升高度以及场所进行限制。
8、举例说明主要的参数、指标范围(见表-1)表—1 略9、技术指标间的关系⑴倾斜角与水平支承距离和提升高度的关系a、一般情况,倾斜角度在设计时是确定的,而上下机仓的长度各厂家也是设计有标准值的,随着提升高度的变化,只需改变中间倾斜段的尺寸即可。