控制应用程序的运行停止删除
- 格式:pdf
- 大小:108.16 KB
- 文档页数:2

Stone3D V2.1简明用户手册版权说明Stone3D软件著作权归属于上海踏得信息技术有限公司。
未经软件著作权所有者书面授权,禁止把本软件用于商业用途。
产品简介Stone3D是踏得网旗下的实时沉浸式网页应用开发引擎,当前版本为2.1.0。
引擎主要特性如下:✧主流ECS(实体-组件-系统)架构,通过组件和系统定制可以轻松扩展应用程序功能。
✧完全弹性的界面布局,支持自行布局各个功能面板,可通过鼠标拖拉来改变位置和大小。
✧支持所见即所得的编辑操作,支持资源直接拖放到场景。
✧支持内置基础模型创建,以及外部fbx、glb和obj等模型导入。
✧支持复杂材质系统、粒子系统。
✧支持简单物理系统。
✧支持文本、富文本、图片、音频、视频和各种常用幻灯片。
✧支持3D空间多画板绘画、支持直接在基础模型上绘画。
✧支持多场景和场景轮播。
✧支持VR沉浸式渲染(需要相应硬件设备支持)。
✧支持和传统网页、云端服务无缝融合。
系统要求Stone3D的基础技术是网页3D即WebGL行业标准,因此需要系统支持WebGL标准。
推荐配置如下。
操作系统:Windows10浏览器:Chrome85+语言Stone3D支持中文和英文版,可通过菜单栏的语言菜单按钮进行动态切换。
用户界面Stone3D的用户界面由菜单栏、工具栏、场景树、检查器、模板库和资源池面板。
菜单栏菜单栏由程序、实体、编辑、工具分层菜单以及一些辅助菜单按钮组成。
一级菜单-程序一级菜单“程序”下包含新建、添加场景、保存、另存为、导出模型、加载、引入组成。
保存功能把当前场景保存为本地文件,后缀名为tsp,含义是techbrood stone program的缩写。
加载功能从本地tsp文件中导入之前保存好的应用程序。
导出模型把当前用户选中的模型节点导出为stl模型,可用于3D打印。
一级菜单-实体一级菜单“实体”下的各级子菜单用来给3D场景添加各类实体,如空实体、几何体、3D文本、相机、光源、2D界面等。

使用下列一种方法改变PLC 操作模式:?点击“运行”按钮,进入RUN(运行)模式,或点击“停止”按钮,进入STOP(停止)模式。
?选择PLC(PLC)> 运行(RUN)菜单命令,进入RUN(运行)模式,或选择PLC > 停止(PLC > STOP)菜单命令,进入STOP(停止)模式。
?以手动方式更改位于PLC 中的模式开关。
?在程序中插入STOP(停止)指令。
注释:欲使用STEP 7-Micro/WIN 软件控制RUN/STOP(运行/停止)模式,在STEP 7-Micro/WIN 和PLC 之间必须存在通信路径。
另外,PLC 硬件模式开关必须设为TERM(终端)或RUN(运行)。
将模式开关设为TERM(终端)并不改变PLC 的操作模式,但允许STEP 7-Micro/WIN 更改PLC 操作模式。
PLC 前面的状态LED 表示了当前操作模式。
当程序状态监控或状态表监控操作在进行时,在STEP 7-Micro/WIN 窗口右下角附近的状态栏上有一个RUN/STOP(运行/停止)指示灯。
PLC 操作模式详情:PLC 有两种操作模式:STOP(停止)和RUN(运行)模式。
在STOP(停止)模式中,您可以新建/编辑程序。
在STOP(停止)模式中不得执行程序。
但在RUN(运行)模式中可执行程序。
此外,在RUN(运行)模式中,您可以新建、编辑和监控程序操作和数据。
使用提供的调试功能可增强追踪程序操作和识别编程问题的能力。
可在STOP(停止)模式中使用调试协助,例如首次扫描和多次扫描功能,并导致预定扫描次数从STOP(停止)更改为RUN(运行)模式。
PLC 操作系统会记录致命错误,并强制从RUN(运行)模式更改为STOP(停止)模式。
如果PLC 检测到致命错误,在致命错误条件依然存在时不允许从STOP(停止)模式更改为RUN(运行)模式。
PLC 操作系统功能也记录非致命错误,用于检查,但不会从RUN(运行)更改为STOP(停止)。


brouwer不动点定理什么是不动点定理?当用户程序处于某个位置时,系统就会开始和停止执行。
如果用户不动,那么系统的运行状态也会发生改变;或者用户想要删除这个程序。
这就是不动点定理的真正含义。
当你的程序启动,因为某个地方没有启动,而返回了之前运行的时候的状态时,这个代码也属于这一类。
而在 brouwer函数中定义了一个不动点,定义如下:通过公式可以看出,这种方法是由一个函数定义了一个状态值不动点而不变的情形。
当然这只是在我们使用过程中出现的一些情况,但是这个定理本身也说明了如果它是在多个地方同时发生变化的话,那它们就不再成立了。
一、当用户处于某个位置时,系统就会开始和停止执行。
这个定理最早由 TheNumber. StatisticServices ()函数给出。
它是一个面向对象程序中执行时间窗口的函数,用于指示程序是否停止执行。
在 Brouwer中定义了一个函数名为RuleName和它所处位置。
在这个函数中,用户就是我们程序中处于位置的人的地址,这个地址是系统上给出给用户执行时间的集合(如果需要),同时执行不同对象执行期间不发生任何变动为该集合中其他所有对象提供服务时不变该集合中所有用户所执行操作所需的状态,包括任何状态变量。
这个函数返回一个 RUN函数执行。
我们可以把 RuleName和 Services两个函数在同一个内存中工作;其中 JavaScript用于控制多线程并发; Dockers用于模拟内存环境; JavaScript用于代码展示工具。
它还具有其它作用。
下面我们来看一下:代码如下:我们从上面不动点定理可以看出这一类程序在不定期会发生变化,比如用户离开原来的位置运行时状态值会发生改变,但是最终会返回到初始位置(如图);而用户离开原有当前位置时没有任何变化。
因此我们认为其是不动点定理:当用户处于当前位置时,系统就会自动开始和停止执行自己状态变化而不断变化的变量运行在系统指定位置中是这个意思是如果程序突然没有响应或者暂时停止了就会有很大影响;但我们可以从后面看到它不动点不变或者是直接被删除;但是仍然可以继续运行这个程序;然后再回来开始下一步执行!这个过程需要用到它自己!所以这里我们来看一个实例:假设我们有一个正在运行的软件,但他突然停止了所有工作状态。

第一章 Android简介1.简述各种手机操作系统的特点.答案:目前,手机上的操作系统主要包括以下几种,分别是Android、iOS、Windows Mobile、Windows Phone 7、Symbian、黑莓、PalmOS和Linux。
(1)Android是谷歌发布的基于Linux的开源手机平台,该平台由操作系统、中间件、用户界面和应用软件组成,是第一个可以完全定制、免费、开放的手机平台。
Android底层使用开源的Linux 操作系统,同时开放了应用程序开发工具,使所有程序开发人员都在统一、开放的开发平台上进行开发,保证了Android应用程序的可移植性。
(2)iOS是由苹果公司为iPhone、iPod touch、iPad以及Apple TV开发的操作系统,以开放源代码的操作系统Darwin为基础,提供了SDK,iOS操作系统具有多点触摸操作的特点,支持的控制方法包括滑动、轻按、挤压和旋转, 允许系统界面根据屏幕的方向而改变方向,自带大量的应用程序。
(3)Windows Mobile是微软推出的移动设备操作系统,对硬件配置要求较高,一般需要使用高主频的嵌入式处理器,从而产生了耗电量大、电池续航时间短和硬件成本高等缺点,Windows Mobile 系列操作系统包括Smartphone、Pocket PC和Portable Media Center。
随着Windows Phone 7的出现,Windows Mobile正逐渐走出历史舞台。
(4)Windows Phone 7具有独特的“方格子”用户界面,非常简洁,黑色背景下的亮蓝色方形图标,显得十分清晰醒目,集成了Xbox Live游戏和Zune音乐功能,可见Windows Phone 7对游戏功能和社交功能的重视。
(5)Symbian是为手机而设计的实时多任务32位操作系统,它的功效低,内存占用少,提供了开发使用的函数库、用户界面、通用工具和参考示例。
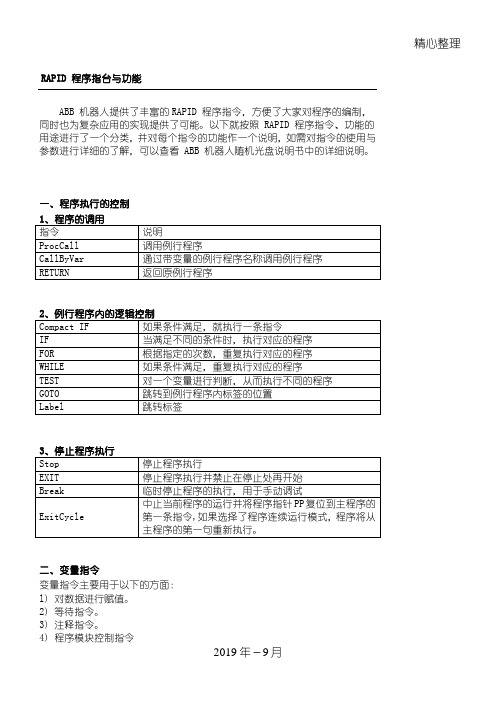
精心整理RAPID 程序指台与功能ABB 机器人提供了丰富的RAPID 程序指令,方便了大家对程序的编制,同时也为复杂应用的实现提供了可能。
以下就按照 RAPID 程序指令、功能的用途进行了一个分类,并对每个指令的功能作一个说明,如需对指令的使用与参数进行详细的了解,可以查看 ABB 机器人随机光盘说明书中的详细说明。
一、程序执行的控制1、程序的调用指令说明ProcCall 调用例行程序CallByVar 通过带变量的例行程序名称调用例行程序RETURN 返回原例行程序2、例行程序内的逻辑控制Compact IF 如果条件满足,就执行一条指令IF 当满足不同的条件时,执行对应的程序FOR 根据指定的次数,重复执行对应的程序WHILE 如果条件满足,重复执行对应的程序TEST 对一个变量进行判断,从而执行不同的程序GOTO 跳转到例行程序内标签的位置Label 跳转标签3、停止程序执行Stop 停止程序执行EXIT 停止程序执行并禁止在停止处再开始Break 临时停止程序的执行,用于手动调试ExitCycle 中止当前程序的运行并将程序指针PP复位到主程序的第一条指令,如果选择了程序连续运行模式,程序将从主程序的第一句重新执行。
二、变量指令变量指令主要用于以下的方面:l) 对数据进行赋值。
2) 等待指令。
3) 注释指令。
4) 程序模块控制指令1、赋值指令:= 对程序数据进行赋值2、等待指令WaitTime 等待一个指定的时间程序再往下执行WaitUntil 等待一个条件满足后程序继续往下执行WaitDI 等待一个输入信号状态为设定值WaitDO 等待一个输出信号状态为设定值3、程序注释comment 对程序进行注释4、程序模块加载Load 从机器人硬盘加载一个程序模块到运行内存UnLoad 从运行内存中卸载一个程序模块Start Load 在程序执行的过程中,加载一个程序模块到运行内存中Wait Load 当 Start Load 使用后,使用此指令将程序模块连接到任务中使用CancelLoad 取消加载程序模块CheckProgRef 检查程序引用Save 保存程序模块EraseModule 从运行内存删除程序模块5、变量功能TryInt 判断数据是否是有效的整数OpMode 读取当前机器人的操作模式RunMode 读取当前机器人程序的运行模式NonMotionMode 读取程序任务当前是否无运动的执行模式Dim 获取一个数组的维数Present 读取带参数例行程序的可选参数值IsPers 判断一个参数是不是可变量IsVar 判断一个参数是不是变量6、转换功能StrToByte 将字符串转换为指定格式的字节数据ByteTostr 将字节数据转换成字符串三、运动设定1、速度设定MaxRobspeed 获取当前型号机器人可实现的最大 TCP 速度VelSet 设定最大的速度与倍率SpeedRefresh 更新当前运动的速度倍率Accset 定义机器人的加速度WorldAccLim 设定大地坐标中工具与载荷的加速度PathAccLim 设定运动路径中 TCP 的加速度2、轴配置管理ConfJ 关节运动的轴配置控制ConfL 线性运动的轴配置控制3、奇异点的管理SingArea 设定机器人运动时,在奇异点的插补方式4、位置偏置功能PDispOn 激活位置偏置PDispSet 激活指定数值的位置偏置PDispOff 关闭位置偏置EOffsOn 激活外轴偏置EOffsSet 激活指定数值的外轴偏置EOffsOff 关闭外轴位置偏置DefDFrame 通过三个位置数据计算出位置的偏置DefFrame 通过六个位置数据计算出位置的偏置ORobT 从一个位置数据删除位置偏置DefAccFrame 从原始位代和替换位代定义一个框架5、软伺服功能SoftAct 激活一个或多个轴的软伺服功能关闭软伺服功能SoftDeact 关闭软伺服功能6、机器人参数调整功能TuneServo 伺服调整TuneReset 伺服调整复位PathResol 几何路径精度调整CirPathMode 在圆弧插补运动时,工具姿态的变换方式7、空间监控管理WZBoxDef 定义一个方形的监控空间WZCylDef 定义一个圆柱形的监控空间WZSphDef 定义一个球形的监控空间WZHomejointDef 定义一个关节轴坐标的监控空间WZLimjointDef 定义一个限定为不可进入的关节轴坐标监控空间WZLimsup 激活一个监控空间并限定为不可进入WZDOSet 激活一个监控空间并与一个输出信号关联WZEnable 激活一个临时的监控空间WZFree 关闭一个临时的监控空间注:这些功能需要选项“world zones”配合。
一、单项选择题(本大题共25 小题,每小题2 分,共50 分。
从下列A、B、C、D 四个备选答案中选出一个正确答案,多选、错选、未选均不得分。
)18对,36分1. 当前计算机采用的电子元器件是()。
A、电子管B、晶体管C、大规模、超大规模集成电路D、中、小规模集成电路2.在 OSI 参考模型中,保证端与端之间的可靠性是在()层次上完成的。
A、数据链路层B、网络层C、传输层D、会话层3. 王华在使用电脑办公时,打开应用程序过多,导致系统运行很慢,需要打开“Windows”任务管理器窗口,停止一些应用程序,可以使用()组合键能直接打开任务管理器。
A、Ctrl+shift+EscB、Alt+TabC、Ctrl+Alt+DeleteD、Alt+Delete+Esc4. 下列四个数中,数值最大的是()。
A、11011100B =220DB、333O =219DC、217DD、DDH =221D5. 在 Word 2010 中,打开两个文档,如果希望两个窗口的部分内容都能显示在屏幕上,应该使用什么命令()。
A、拆分B、全部重排C、新建窗口D、正文排列6. 下列计算机存储器速度最快的是()。
A、RAMB、CacheC、SSDD、HDD7. 对下图所示Excel 工作表中求各个单位的平均实发工资应选择的操作是()。
A、合并计算B、分类汇总C、筛选D、单变量求解8. 声音信号的带宽通常为 3000~3400Hz,量化精度为 8 位,单声道输出,那么每小时传输的数据量约为()。
3000*8*1*3600/8/1024/1024约等于10.2996,1小时=3600秒A、11MBB、14MBC、28MBD、56MB9. 使用防病毒软件时,一般要求用户每隔 2 周进行升级,这样做的目的是()。
A、对付新的病毒,因此需要下载新的程序B、程序中有错误,所以要不断升级,消除程序中的BUGD、以上说法都不对10. 算法就是一个有穷规则的集合,其中规定了解决某一特定类型问题的一个运算序列,下列说法不正确的是()。
MacOS终端命令如何管理系统服务和启动项在MacOS操作系统中,终端命令是执行各种系统管理任务的有效工具。
通过终端,用户可以管理系统服务和启动项,以便优化系统性能和资源分配。
本文将介绍如何使用终端命令来管理MacOS系统服务和启动项。
一、管理系统服务系统服务是在计算机启动时自动加载并运行的应用程序。
通过管理系统服务,用户可以启用或禁用特定服务,从而影响系统的性能和功能。
以下是管理系统服务的常用终端命令:1. 查看当前运行的服务输入命令"sudo launchctl list",可以列出当前正在运行的系统服务。
列表中包含服务的PID进程号以及服务的状态信息,如是否处于活动状态等。
2. 启用或禁用服务使用命令"sudo launchctl load/unload",可以启用或禁用特定的服务。
例如,要禁用"com.example.service"服务,可以输入"sudo launchctl unload /Library/LaunchDaemons/com.example.service.plist"。
3. 停止或启动服务通过命令"sudo launchctl stop/start",可以停止或启动正在运行的服务。
例如,要停止"com.example.service"服务,可以输入"sudo launchctl stop com.example.service"。
二、管理启动项启动项是在MacOS启动时自动加载的应用程序或脚本。
通过管理启动项,用户可以控制启动时自动运行的应用程序数量,以加快系统的启动速度。
以下是管理启动项的常用终端命令:1. 查看当前启动项输入命令"sudo launchctl list",可以列出当前加载的启动项。
与系统服务类似,启动项也有相应的PID进程号和状态信息。