控制系统的频率特性分析
- 格式:doc
- 大小:336.00 KB
- 文档页数:10
控制系统频域分析控制系统频域分析是对控制系统的频率特性进行研究和评估的方法。
它通过在频域上分析信号的幅值和相位响应,帮助我们了解系统的稳定性、性能以及对不同频率输入的响应。
一、引言控制系统在现代工程中起着至关重要的作用。
通过对系统的频域特性进行分析,我们可以更好地理解和优化控制系统的性能。
二、频域分析的基本概念1. 频率响应控制系统的频率响应描述了系统对不同频率输入信号的响应能力。
通过频率响应,我们可以了解系统在不同频率下的增益和相位特性。
2. 幅频特性幅频特性是指系统输出信号的幅度与输入信号的频率之间的关系。
通常用幅度曲线图来表示,可以帮助分析系统的放大或衰减程度。
3. 相频特性相频特性描述了系统输出信号的相位与输入信号的频率之间的关系。
相位曲线图可以帮助评估系统的相位延迟或提前程度。
三、常见的频域分析方法1. 频率响应函数频率响应函数是一个复数函数,可以描述系统的幅频和相频特性。
常见的频率响应函数包括传递函数和振荡函数等。
2. Bode图Bode图是一种常用的频域分析工具,可以将系统的幅频和相频特性直观地表示出来。
它以频率为横轴,幅度或相位为纵轴,通过线性坐标或对数坐标来绘制。
3. Nyquist图Nyquist图是一种使用复平面来表示频率响应的图形。
它可以帮助我们判断系统的稳定性,并评估系统的相位边界和幅度边界。
四、频域分析的应用频域分析在控制系统设计和优化中有着广泛的应用。
以下是几个常见的应用领域:1. 系统稳定性分析通过频域分析,我们可以判断系统是否稳定,以及如何设计控制器来维持或改善系统的稳定性。
2. 性能评估频域分析可以帮助我们评估系统的性能,比如响应时间、超调量等。
通过调整系统的频率响应,我们可以提高系统的性能。
3. 滤波器设计频域分析在滤波器设计中起着重要的作用。
通过分析系统的频率响应,我们可以设计出满足特定要求的滤波器。
4. 控制系统建模频域分析可以帮助我们建立控制系统的数学模型,从而更好地理解和优化系统的性能。
竭诚为您提供优质文档/双击可除控制系统的频率特性分析实验报告篇一:控制系统频率特性实验实验名称控制系统的频率特性实验序号3实验时间学生姓名学号专业班级年级指导教师实验成绩一、实验目的:研究控制系统的频率特性,及频率的变化对被控系统的影响。
二、实验条件:1、台式计算机2、控制理论&计算机控制技术实验箱ThKKL-4系列3、ThKKL仿真软件三、实验原理和内容:1.被测系统的方块图及原理被测系统的方块图及原理:图3—1被测系统方块图系统(或环节)的频率特性g(jω)是一个复变量,可以表示成以角频率ω为参数的幅值和相角。
本实验应用频率特性测试仪测量系统或环节的频率特性。
图4—1所示系统的开环频率特性为:采用对数幅频特性和相频特性表示,则式(3—2)表示为:将频率特性测试仪内信号发生器产生的超低频正弦信号的频率从低到高变化,并施加于被测系统的输入端[r(t)],然后分别测量相应的反馈信号[b(t)]和误差信号[e(t)]的对数幅值和相位。
频率特性测试仪测试数据经相关器件运算后在显示器中显示。
根据式(3—3)和式(3—4)分别计算出各个频率下的开环对数幅值和相位,在半对数坐标纸上作出实验曲线:开环对数幅频曲线和相频曲线。
根据实验开环对数幅频曲线画出开环对数幅频曲线的渐近线,再根据渐近线的斜率和转角频确定频率特性(或传递函数)。
所确定的频率特性(或传递函数)的正确性可以由测量的相频曲线来检验,对最小相位系统而言,实际测量所得的相频曲线必须与由确定的频率特性(或传递函数)所画出的理论相频曲线在一定程度上相符。
如果测量所得的相位在高频(相对于转角频率)时不等于-90°(q-p)[式中p和q分别表示传递函数分子和分母的阶次],那么,频率特性(或传递函数)必定是一个非最小相位系统的频率特性。
2.被测系统的模拟电路图被测系统的模拟电路图:见图3-2注意:所测点-c(t)、-e(t)由于反相器的作用,输出均为负值,若要测其正的输出点,可分别在-c(t)、-e(t)之后串接一组1/1的比例环节,比例环节的输出即为c(t)、e(t)的正输出。

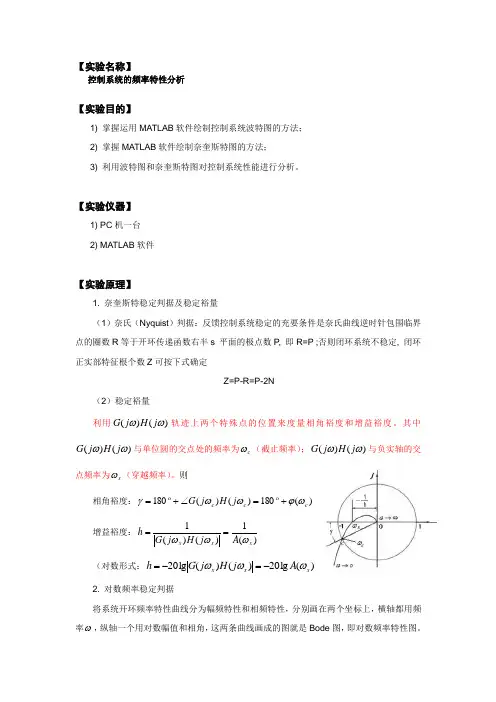
【实验名称】控制系统的频率特性分析【实验目的】1) 掌握运用MATLAB 软件绘制控制系统波特图的方法; 2) 掌握MATLAB 软件绘制奈奎斯特图的方法; 3) 利用波特图和奈奎斯特图对控制系统性能进行分析。
【实验仪器】1) PC 机一台 2) MATLAB 软件【实验原理】1. 奈奎斯特稳定判据及稳定裕量(1)奈氏(Nyquist )判据:反馈控制系统稳定的充要条件是奈氏曲线逆时针包围临界点的圈数R 等于开环传递函数右半s 平面的极点数P , 即R=P ;否则闭环系统不稳定, 闭环正实部特征根个数Z 可按下式确定Z=P-R=P-2N (2)稳定裕量利用)()(ωωj H j G 轨迹上两个特殊点的位置来度量相角裕度和增益裕度。
其中)()(ωωj H j G 与单位圆的交点处的频率为c ω(截止频率);)()(ωωj H j G 与负实轴的交点频率为x ω(穿越频率)。
则相角裕度:)(180)()(180c c c j H j G ωϕωωγ+=∠+= 增益裕度:)(1)()(1x x x A j H j G h ωωω==(对数形式:)(lg 20)()(lg 20x x x A j H j G h ωωω-=-= 2. 对数频率稳定判据将系统开环频率特性曲线分为幅频特性和相频特性,分别画在两个坐标上,横轴都用频率ω,纵轴一个用对数幅值和相角,这两条曲线画成的图就是Bode 图,即对数频率特性图。
因为Bode 图与奈氏图有一一对应关系,因此,奈氏稳定判据就可描述为基于Bode 图的对数频率稳定判据:(1)开环系统稳定,即开环系统没有极点在正右半根平面,如果其对数幅频曲线大于0dB 的区域内,相频曲线对180-线正负穿越次数相等,那么闭环系统就是稳定的,否则是不稳定的。
(2)开环系统不稳定,有P 个极点在正右半平面,如果其对数幅频曲线大于0dB 的区域内,相频曲线对180-线正穿越次数大于负穿越次数P/2,闭环系统就是稳定的,否则是不稳定的。
控制系统频率特性实验控制系统频率特性实验是一种较为常见的控制工程实验,其主要目的是探究不同频率下控制系统的性能表现,同时应用所学知识进行系统频率特性分析和设计。
下面将分为实验目的、实验内容、实验步骤及实验结果几个方面进行详细介绍。
实验目的:1. 探究不同频率下控制系统性能表现2. 进行频率特性分析,并了解控制系统中的稳态误差与阻尼比之间的关系3. 进行频率特性设计,并掌握控制器在频率特性中的应用实验内容:1. 频率响应性能测试2. 获取系统的幅频和相频特性曲线3. 根据幅频曲线分析系统稳态误差,根据相频曲线分析系统阻尼比4. 根据工程实际需要,设计相应的控制器并给出稳态误差和阻尼比的实验结果实验步骤:1. 建立试验系统,包括控制对象和控制器2. 调整测试样本的初始参数,保证系统的稳态3. 绘制系统幅频特性曲线,观察幅频曲线的变化情况并进行分析7. 对实验结果进行统计分析实验结果:通过实验,我们得到了不同频率下控制系统的性能表现,以及系统的幅频和相频特性曲线。
在此基础上,我们可以进行系统频率特性分析,掌握控制器在频率特性中的应用。
通过对幅频曲线的分析,我们可以了解系统的稳态误差情况。
同时可发现,随着频率增大,系统稳态误差逐渐增大,这是由于系统的惯性效应在高频率下更为明显导致的。
在此基础上,我们可以通过设计相应的控制器来减小系统稳态误差。
通过对相频曲线的分析,我们可以了解系统的阻尼比情况。
随着频率增大,我们可以观察到系统阻尼比逐渐降低,这是由于系统越接近临界系统,其阻尼比越小,因此在系统设计中需要注意避免系统过度激励的情况。
总的来说,控制系统频率特性实验是一种重要的控制工程实验,通过实验,我们可以深入了解系统在不同频率下的性能表现,为实际工程中的控制系统设计提供有力的支持和指导。
第五章 控制系统的频域分析一、频域特性的概念线性定常系统在正弦输入信号的作用下,其输出的稳态分量是与输入信号相同频率的正弦函数。
输出稳态分量与输入正弦信号的复数比称为频率特性。
用数学式表示为:)()()(ωωωj X j Y j G = 系统的频率特性)(ωj G 是系统传递函数)(s G 的特殊形式,它们之间的关系是ωωj s s G j G ==)()(二、频率特性的表示方法直角坐标式: )()()(ωωωjI R j G += ,见图1.5-1式中:称之为实频特性-)(ωR称之为虚频特性-)(ωI极坐标式: )()()(ωφωωj e A j G = 式中:称之为幅频特性-=)()(ωωj G A称之为相频特性-∠=)()(ωωφj G 直角坐标和级坐标表示方法之间的关系是)()()()()()()(sin )()()(cos )()(122ωωωφωωωωφωωωφωωR I tg I R A A I A R -=+=== 图形如图1.5-1所示。
I 图1.5-1三、幅相频率特性曲线(又称乃氏图,乃氏曲线)以角频率ω为参变量,对某一频率ω,有相应的幅频特性)(ωA 和相频特性)(ωφ与之对应,当ω从∞→0变化时,频率特性构成的向量在复平面上描绘出的曲线称为幅相频率特性曲线。
又称为乃氏图、乃氏曲线。
四、对数频率特性(又称频率特性的对数坐标图,伯德图)对数频率特性图(伯德图)有两张图,一张为对数幅频特性曲线图,另一张是对数相频特性曲线图。
前者以频率ω为横坐标,并采用对数分度,将)(lg 20ωj G 的函数值作为纵坐标,并以分贝(dB )为单位均匀分度。
后者的横坐标也以频率ω为横坐标(也用对数分度),纵坐标则为相角)(ωφ,单位为度)(︒,均匀分度。
两张图合起来称为伯德图。
五、奈奎斯特稳定性判据(又称奈氏判据)1. 对于开环稳定的系统,闭环系统稳定的充分必要条件是开环系统的奈氏曲线)()(ωωj H j G 不包围()0,1j -点。
实验六 控制系统的频率特性分析
1.已知系统传递函数为:1
2.01)(+=s s G ,要求: (1) 使用simulink 进行仿真,改变正弦输入信号的频率,用示波器观察输
出信号,记录不同频率下输出信号与输入信号的幅值比和相位差,即
可得到系统的幅相频率特性。
F=10时
输入: 输出:
F=50时
输入:输出:
(2)使用Matlab函数bode()绘制系统的对数频率特性曲线(即bode图)。
提示:a)函数bode()用来绘制系统的bode图,调用格式为:
bode(sys)
其中sys为系统开环传递函数模型。
参考程序:
s=tf(‘s’); %用符号表示法表示s
G=1/(0.2*s+1); %定义系统开环传递函数
bode(G) %绘制系统开环对数频率特性曲线(bode图)
实验七连续系统串联校正
一.实验目的
1.加深理解串联校正装置对系统动态性能的校正作用。
2. 对给定系统进行串联校正设计,并通过matlab实验检验设计的正确性。
二.实验内容
1.串联超前校正
系统设计要求见课本例题6-3,要求设计合理的超前校正环节,并完成以下内容用matlab画出系统校正前后的阶跃相应,并记录系统校正前后的超调量及调节时间
num=10;
1)figure(1)
2)hold on
3)figure(1)
4)den1=[1 1 0];
5)Gs1=tf(num,den1);
6)G1=feedback(Gs1,1,-1);
7)Step(G1)
8)
9)k=10;
10)figure(2)
11)GO=tf([10],[1,1,0]);
12)Gc=tf([0.456,1],[1,00114]); 13)G=series(G0,Gc);
14)G1=feedback(G,1);
15)step(G1);grid
2)使用Matlab函数bode()绘制系统的对数频率特性曲线,记录系统校正前后的幅值裕度和相角裕度。
k=1/0.1;
G0=zpk([],[0 -1],k);
[h0,r,wx,wc]=margin(G0);
wm=4.4;
L=bode(G0,wm);
Lwc=20*log10(L);
a=10^(-0.1*Lwc);
T=1/(wm*sqrt(a));
phi=asin((a-1)/(a+1));
Gc=(1/a)*tf([a*T 1],[T 1]);
Gc=a*Gc;
G=Gc*G0;
bode(G,'r',G0,'b--');grid;
[h,r,wx,wc]=margin(G)
2.串联滞后校正
系统设计要求见课本例题6-4,要求按题目要求设计合理的滞后校正环节,并完
成以下内容
1)用matlab画出系统校正前后的阶跃相应,并记录系统校正前后的超调量及调节时间
2)使用Matlab函数bode()绘制系统的对数频率特性曲线,记录系统校正前后的幅值裕度和相角裕度。
num=30; num=30;
den=conv([1 0],conv([0.1 1],[0.2 1])); den=conv([1 0],conv([0.1 1],[0.2 1]));
Gc=tf(num,den); G1=tf(num,den);
G1=feedback(Gc,1);
Gd=tf([3.7,1],[41,1]); Gd=tf([3.7,1],[41,1]);
Ge=tf(num,den); Ge=tf(num,den);
Gs=series(Gd,Ge); G2=series(Gd,Ge);
G2=feedback(Gs,1);
subplot(2,1,1);step(G1);grid;
subplot(1,2,1);bode(G1);grid;
subplot(2,1,2);step(G2);grid;
subplot(1,2,2);bode(G2);grid;
3.串联超前—滞后校正
系统设计要求见课本例,要求设计合理的超前—滞后校正环节,并完成以下内容
1)用matlab画出系统校正前后的阶跃相应,并记录系统校正前后的超调量及调节时间
2)使用Matlab函数bode()绘制系统的对数频率特性曲线,记录系统校正前后的幅值裕度和相角裕度。
num=180; num=180;
den=conv([1 0],conv([1/6 1],[0.5 1])); den=conv([1 0],conv([1/6 1],[0.5 1]));
Gc=tf(num,den); G1=tf(num,den);
G1=feedback(Gc,1);
num1=conv([1.28 1],[0.5 1]); num1=conv([1.28 1],[0.5 1]);
den1=conv([64 1],[0.01 1]); den1=conv([64 1],[0.01 1]);
Gd=tf(num1,den1); Gd=tf(num1,den1);
Ge=tf(num,conv([1 0],[0.167 1])); Ge=tf(num,conv([1 0],[0.167 1])); Gs=series(Gd,Ge); G2=series(Gd,Ge);
G2=feedback(Gs,1);
subplot(2,1,1);step(G1);grid; subplot(1,2,1);bode(G1);grid; subplot(2,1,2);step(G2);grid; subplot(1,2,2);bode(G2);grid;
三.实验结果。