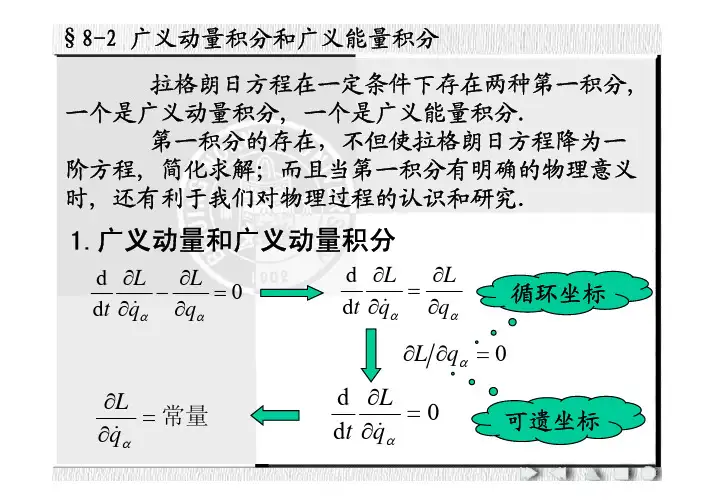
北京大学理论力学讲义 LagrangeEq
- 格式:pdf
- 大小:445.88 KB
- 文档页数:76

“弹性力学”课程是北京大学力学与工程科学系的主干基础课,三年级开设,一学期的课程,力学班周学时为5,工程班为3。
所谓弹性是指外力消失后,物体恢复原状的特性。
弹性力学是研究弹性体在外界因素影响下,其内部所生成的位移和应力分布的学科。
弹性力学是众多工程学科的基础,此课程十分重要,力学系本科的许多后续课程都建立在弹性力学的基础之上。
授课教案详见王敏中等编著的《弹性力学教程》。
目前网上给出如下一些教案示例:1.“第一章矢量与张量”2.“第二章应变分析”3.“第三章应力分析4.“第六章 Saint-venant 问题” (§1-§5)5.“第七章弹性力学平面问题的直角坐标解法” (§1-§4)弹性――外力消失后,物体恢复原状的特性。
弹性体――仅仅有弹性性质的一种理想物体。
弹性力学――研究弹性体在外界因素影响下,其内部所生成的位移和应力分布的学科。
人类利用物体的弹性可以追溯到无穷久远的年代,但是弹性力学作为一门科学却是伴随着工业革命而诞生的,并被广泛应用于土木、航空、船舶、机械等工程领域。
弹性力学迄今已有三百余年的发展历史,1678年Hooke提出变形与外力成正比的定律,1821年Navier和1823年Cauchy建立了关于应力的平衡方程,形成了弹性力学的初步理论;Saint-Venant(1855)关于扭转与弯曲的解答,Мусхелишвили(1933)的复变解法是弹性理论发展中的经典之作;二十世纪下半叶,弹性理论进一步深化和扩展,许多基本概念和基本问题被深入和细致的研究,并与其它物理因素相互耦合出现了许多交叉领域,诸如热弹性力学、粘弹性力学、磁弹性力学、压电介质弹性力学、微孔介质弹性力学、微极弹性力学、非局部弹性力学、准晶弹性力学等,极大地丰富了弹性力学的研究范围。
本书主要介绍弹性力学的基本理论、典型方法、著名问题、重要结果,希望能反映出这门既古老又年青、既理论又实用的学科的面貌,作为进一步研究弹性力学和固体力学其它分支的起点。

第一章Lagrange 方程本章主要内容§1、约束,自由度和广义坐标§2、虚功原理§3、Lagrange方程在矢量力学中,最基本、最重要的方程是F =m a 。
1、处理运动受到约束(即限制)的力学问题一个质量为m 的质点,受到作用力F 已知,在3维空间中,t d /r md F 22 =这里包含3个标量方程,3个未知数(矢径的3个分量)。
如果这个质点被限制在一个光滑的曲面f (r )=0上运动,f (r )=f (x,y,z )= 0 ,22/,F R md r dt += 在曲面上,df =0,由于曲面光滑,所以曲面对质点的作用力R ∝,ˆn •O •r d rf (r )=0m =0ˆn 矢量力学的不足?运动,运动方程是:方程为:ˆn表示法向单位矢量。
同理,质点约束在光滑的曲线上运动,独立变量减少了2个,但方程和未知量却增加2个。
但在分析力学中,情况却相反,质点的运动受到约束,描述质点运动的独立变量数减少,方程和未知量的个数也随着减少,使求解问题变得更简单。
2、描述质点运动的坐标在F=m a中,r是我们要求解的重要变量,但这种变量的形式太受局限,难于用来描述复杂的物理体系,如电磁场、引力场,更不用说量子体系。
在分析力学中,r被广义坐标取代,这种描述方法可直接推广到电磁场、引力场、量子力学、量子场论,可以用于自然界中的所有4种基本相互作用。
3、作用力F是一个宏观量,在微观世界中没有这个量。
宏观量F与微观世界中的动量变化相联系。
在分析力学中,通常用能量、广义动量这类更基本的物理量,这样便于把分析力学推广到其它领域。
1788年,J. L. Lagrange写了一本名为“分析力学”的书,这就是现在的Lagrange形式的分析力学。
1834年,W. Hamilton 建立了另一种形式的分析力学,就是现在的Hamilton形式的分析力学。
除这两种形式之外,分析力学还被表述为变分形式。
我们现在所说的分析力学主要包括这3种表述形式。
分析力学比较抽象,不像矢量力学那样直观。
在Lagrange的分析力学中,没有一张图。
矢量力学则直观、图像清晰。
§1、约束,自由度和广义坐标1、约束2、广义坐标和自由度数3、举例约束就是对运动的限制。
••m 1m 2刚体上的各个质点穿在刚性的线上的珠子刚性杆连接的两个质点如:•m •••• 1、约束111222,,,,,,,...,,,n n n x y z x y z x y z 一个由n 个质点组成的力学体系,各个质点的位置矢量为:12.,,...,n r r r 分量形式:或表示为:,1,2,...,.a r a n = 或表示为:x 1 ,x 2 ,…,x 3n 。
或:x i ,i =1,2,…,3n.(a, b, c ,… 表示质点编号)(i, j, k,… 表示坐标分量的编号)为简化记号,用x 代替全部3n 个带下标的x i ,等。
约束的数学形式就是约束方程,如:如鱼在水中游的约束方程,就是不等式形式的,以后,我们不讨论这种形式的约束,只限于等式形式的约束。
123123,,,,(,,,,)0,0n n x x t x x f x x 或等,223113,,,,(,,,,)0.n n f x t x x x x x= /i i xdx dt = 这里为第i 个速度分量;等式形式的约束方程如:形式如的方程,不显含时间t ,显含时间t ,这样的约束称为非完整约束。
f ( x , ,t ) =0,x •f ( x ,t ) =0不显含速度,x •f ( x , ,t ) =0x •如果不可能消掉,x •显含速度,如果能消掉,x •x •使其变为f (x ,t )=0形式,形式如使其变为f (x ,t )=0形式,这样的约束称为稳定约束。
称为不稳定约束。
称为完整约束。
仍然是完整约束。
f ( x , ) =0x •上面等式形式的约束方程可以简单的写成:f ( x , ,t ) =0。
x •2、广义坐标和自由度数能完全确定一个力学体系的位置,最少个数的一组变量被称为广义坐标。
广义坐标记为:q 1 ,q 2 ,…,q s 。
或记为:q , =1, 2, …, s 。
, , g,...等表示广义坐标的编号。
从广义坐标的定义看,它们的选取有很大的任意性。
和质点组的位置相联系的长度、角度、面积等都可以作为广义坐标。
选广义坐标一般也不需要坐标系。
•m O l >0 一个体系的独立的速度分量个数称为这个体系的自由度数。
如右图,只要取好零点,规定l 的正方向,l 就是一个广义坐标。
这时,广义坐标个数为:s = 3n -h ,如果一个体系由n 个质点组成,受到h 个独立的完整约束:f 1(x ,t ) =0,…, f h (x ,t ) =0, k 个独立的非完整约束:这里因为每一个独立的完整约束方程都使某一个坐标分量不能独立变化。
每一个独立的非完整约束方程都使某一个速度分量不能独立变化,因此:自由度数为:3n -h -k < s 。
速度分量数就是坐标独立的微分个数,也就是广义坐标独立的无限小变更数。
x g 1(x ,, t ) =0,…,•由于速度分量=dx i /dt ,所以独立的x i •x g k (x ,, t ) =0,•3、举例盘上某一半径与竖直方向的夹角为 ,选该体系的广义坐标。
(1)一个薄园盘限于粗糙的水平面xy 上纯滚动,盘面始终与xy 平面垂直,C x y r t A 盘与xy 平面的接触点为A ,盘可以在xy 平面滚动,C 点(即A 点)的x 、y 坐标可以任意变化,所以取x 、y 为2个广义坐标;可绕CA 转,所以取 ;对x 、y 、 的确定值,不同的 代表园盘不同位置。
x 、y 、 、 确定后,园盘的位置完全固定。
因此,这4个量可取为广义坐标,即s = 4。
盘面过A 的切线为t ,切线与x 轴的夹角为 ,13由于v c = r ,•即cos cos c x v r == cos dx rd =由于、 之间不存在函数关系,所以上式不可能被积分,也就是说,[1]不可能划为f (x,t)=0形式。
所以,[1]为非完整约束。
Cx y r tAO 所以 由[2]得,dx ,dy 完全由广义坐标和d 确定,因此是不独立的,独立的微分个数为2(例如:d 、d )。
所以,这个体系的广义坐标数s = 4, 自由度数d = 2。
从这个例子,我们看到非完整约束只减少自由度数,不影响广义坐标数。
sin sin c y v r == [1]sin dy rd =[2]加上约束条件 =0,(2)在以上问题中,上面的约束方程变为:0x r y = = 即为完整约束形式。
这时,体系又多了2个完整约束方程(蓝色表达式),这时,s = 4-3=1,可取x 或 ,d =s =1。
(3)在(1)中,如果xy 平面不粗糙,x 、y 、 、 将没有任何限制,这时,d =s =4。
一个力学体系的全部约束都是完整的,这个体系就被称为完整约束体系。
0x r x =+0y y =,积分今后,除特别指明外,我们只讨论完整约束。
类似的,一个力学体系的全部约束都是稳定的,这个体系就被称为稳定约束体系。
4、变换方程一个由n 个质点组成的体系,其位置由描述。
或x i ,i = 1,2,…,3n ,联系这两组变量之间的关系式:x i = x i (q 1 ,q 2 ,…,q s ,t)称为变换方程。
q , =1,2,…, s (s ≤3n )= x i (q ,t),i = 1,2,…,3n ,§2、虚功原理1、求和规则2、实位移和虚位移3、虚功、理想约束4、虚功原理5、广义力6、举例1、求和规则在物理学中,我们经常需要求和。
例如:一个体系由n 个质点组成,用a 表示质点的编号,a = 1 , 2 , …, n ,第a 个质点的动量为m a v a ,1.na a a m = v 这类求和在物理学中很多,其中的求和是对变动指标的全部可能值进行,并且被求和的指标在每一项中出现了2次。
因此,可以约定(A. Einstein),在一项中,如果变动指标出现2次或2次以上,就表示对指标的所有可能值求和。
这就是说,m a v a 就表示1.na a a m = v 体系的总动量为:18如果用i 表示体系的质点坐标分量序号,i =1,2,…,3n ,第i 个质点的动量的平方和为:321,n i i p= 用求和规则可表示为:p i p i 。
2211n n a a a a a a m v m v ==固定指标不表示求和,如:m 1v 1 ,p x p x 。
m a v a 2m b v b 2,但不能表示为:m a v a 2 m a v a 2 。
也有时,m a v a 2 只表示第a 项,这时,需要特别说明:“这里的重复指标不表示求和”。
从现在起,变动指标出现2次或2次以上一律表示求和,特别说明除外。
2、实位移和虚位移无限小的实位移记为:d r a 、dx i 。
dq 可理解为广义实位移。
实位移就是我们通常所说的位移,产生在特定的时间间隔内,符合力学规律(包括运动方程、约束条件等)。
力学体系在t 时刻的(无限小)虚位移:体系满足t 时刻约束条件的任意无限小位置变更。
虚位移不一定满足力学规律。
虚位移记为: r a 、 x i 。
对稳定约束, 无限小实位移就是虚位移中的某一个。
对于受到约束的体系,由于约束方程的限制,n 个 r a ,或3n 个 x 是不独立的。
••r d r O t t +dt • rr m q 为广义虚位移。
20对完整约束体系,约束方程的作用只在于 对一个由n 个质点组成的力学体系,第a 个质点受到的作用力为:第a 个质点所受到的主动力(A pplied, or A ctive force)因此,广义坐标本身变化是任意的,即s 个 q 是独立的。
.a a A a R F F =+减少了广义坐标的个数,3、虚功、理想约束Aa F 其中,和分别为a R 和约束力。
主动力和约束力没有明确的界限。
约束力通常有以下2个特点:(1)保持约束存在,没有约束力,约束就消失了。
F Am gF fN图中,F A 为推力,m g 为重力,(2)被动的,随主动力的变化而变化。
N 和F f 分别支撑力和摩擦力。
N 为约束力,F A ,m g 为主动力。
F f 一般也算作约束力。
虚功:当质点产生虚位移时,作用力所做的功称为虚功。
第1个质点有虚位移 r1时,作用力对第1个质点所做的虚功为:W1 = F1 · r1,对整个体系,总虚功为:W= F a· r a,(注意:重复指标a表示求和)。
= F a A· r a +R a· r a 。