SIMOTION-D在板带在线激光焊机中的应用
- 格式:doc
- 大小:224.51 KB
- 文档页数:8

西门子控制器 SIMOTIOND在飞剪中的应用研究摘要:本文讨论了基于嵌入式西门子控制器的simotiond系统的体系结构。
在深入研究的基础上,开发了相应的运动控制软件,给出了运动控制软件的基本功能模型。
实现了SIMOTION、PROFIBUS DP模块和PLC在飞剪仿真系统中的应用模式。
关键词:飞剪;嵌入式西门子控制器SIMOTIOND;PLC;Profibus-DP1.前言本文讨论了基于嵌入式西门子控制器的simotiond系统的体系结构。
在深入研究的基础上,开发了相应的运动控制软件,给出了运动控制软件的基本功能模型。
实现了SIMOTION、PROFIBUS DP模块和PLC在飞剪仿真系统中的应用模式。
1.西门子控制器SIMOTIOND系统架构SIMOTION体系结构的核心是古高公司开发的嵌入式SIMOTION。
simotiond控制器的核心是基于PC-104总线和高速DSP芯片的开放式同步运动控制卡。
它与古高公司开发的PROFIBUS-DP通信从卡一致,构成具有现场总线通信功能的嵌入式控制器。
Simotiond提供4通道16位D/a模拟电压(± 具有6个4倍频差分光电编码器反馈信号接口,输入信号频率可达8MHz。
可编程数字PID+速度前向碰撞+加速度前向碰撞滤波模式,卡上的DSP芯片有专门的同步控制程序,基本上可以监控进给计数编码器和剪刀位置编码器,并对剪刀驱动电机进行高频实时调节,使剪刀在高速板达到设定的裁切长度时能移动到裁切点,并在同步区域与板材保持同步运动。
基于PROFIBUS通信从卡和pc104与运动控制卡相连的通信主卡,构建了一个典型的PROFIBUS-DP单主从控制西门子控制器的仿真系统。
PC-104与西门子控制器simotion通信。
一方面,SIMOTION收集的数据和状态被发送到主机进行监控。
另一方面,将主机的参数设定、电机调整和误差补偿指令发送给simotiond控制器,对送料和剪切电机进行控制。
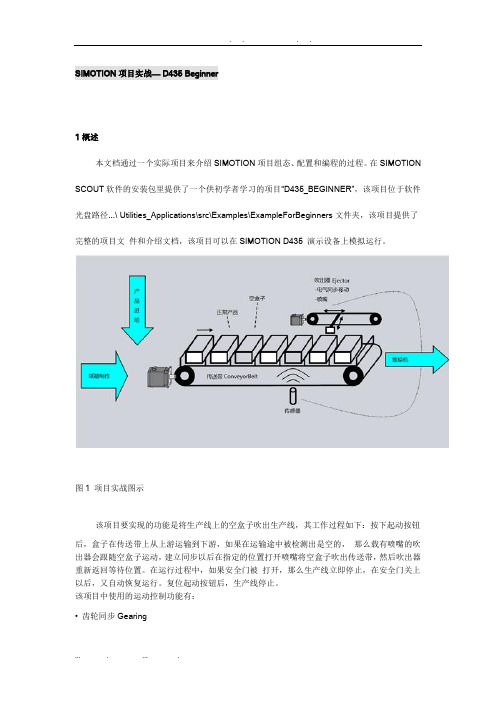
SIMOTION项目实战— D435 Beginner1概述本文档通过一个实际项目来介绍SIMOTION项目组态、配置和编程的过程。
在SIMOTION SCOUT软件的安装包里提供了一个供初学者学习的项目“D435_BEGINNER”,该项目位于软件光盘路径...\ Utilities_Applications\src\Examples\ExampleForBeginners文件夹,该项目提供了完整的项目文件和介绍文档,该项目可以在SIMOTION D435 演示设备上模拟运行。
图1 项目实战图示该项目要实现的功能是将生产线上的空盒子吹出生产线,其工作过程如下:按下起动按钮后,盒子在传送带上从上游运输到下游,如果在运输途中被检测出是空的,那么载有喷嘴的吹出器会跟随空盒子运动,建立同步以后在指定的位置打开喷嘴将空盒子吹出传送带,然后吹出器重新返回等待位置。
在运行过程中,如果安全门被打开,那么生产线立即停止,在安全门关上以后,又自动恢复运行。
复位起动按钮后,生产线停止。
该项目中使用的运动控制功能有:• 齿轮同步Gearing• 凸轮同步Camming• 快速点输出Output Cam2项目中使用的硬件和软件2.1项目中使用的硬件项目使用的硬件基于SIMOTION D435(可以转换到其他SIMOTION硬件),具体的产品如下表所示。
表1 本项目所使用的硬件列表2.2项目中使用的软件表2 本项目所使用的软件列表3项目配置SIMOTION SCOUT项目的基本配置步骤如下:1. 配置驱动器2. 配置工艺对象TO3. 编写程序并分配执行系统4. 连接HMI设备3.1配置驱动器本项目中有两台电机,由双轴电机模块驱动,可以参考下载中心应用文档编号A0309(视频教程)来完成驱动器配置文档名称《SIMOTION D435调试入门》,其下载网址如下:http: ///download/searchResult.aspx?searchText=A0309配置完成以后,可以将驱动重命名为conveyor和eject,项目如下图所示:图2 项目配置配置完成以后,重新进行对SIMOTION和SINAMICS进行下载并保存数据(Copy RAM to ROM)。

Simotion D 矢量轴控制一、Simotion D 简介Simotion D 是西门子公司推出的一种多功能运动控制系统,可用于对工业生产中的各种运动进行精确控制。
该系统结合了PLC、运动控制器和HMI的功能,具有高性能、高可靠性和灵活性等特点,广泛应用于各种自动化设备和生产线中。
二、Simotion D 的矢量轴控制1. 矢量轴控制的概念矢量轴控制是指通过对电动机控制系统进行矢量控制,实现对运动轴的高精度控制。
与传统的标量控制相比,矢量轴控制具有更高的动态性能和控制精度,能够更好地适应复杂的工业生产环境。
2. Simotion D 的矢量轴控制技术Simotion D 采用先进的矢量控制算法和高性能的数字信号处理器(DSP),实现对运动轴的精确控制。
其独特的矢量算法可以提高电机的运行效率,减小电机的热损,延长电机的使用寿命。
Simotion D 还支持多种不同类型的电机,包括同步电机、异步电机和直流电机等,满足不同工业应用的需求。
3. Simotion D 的矢量轴控制功能Simotion D 的矢量轴控制功能包括速度闭环控制、位置闭环控制、力矩控制等,能够实现对不同类型的运动轴进行精确控制。
Simotion D 还支持多轴同步控制和准同步控制,能够实现复杂的多轴运动控制任务。
4. Simotion D 的矢量轴控制应用Simotion D 的矢量轴控制广泛应用于各种自动化设备和生产线中,包括机床、食品包装机、注塑机、搬运机器人等。
在这些应用中,Simotion D 可以实现高速、高精度的运动控制,提高生产效率和产品质量。
5. Simotion D 的矢量轴控制优势Simotion D 的矢量轴控制具有以下优势:(1)高性能:采用先进的矢量控制算法和高性能的数字信号处理器,实现对运动轴的精确控制。
(2)灵活性:支持多种不同类型的电机,满足不同工业应用的需求。
(3)稳定性:实现速度闭环控制、位置闭环控制、力矩控制等多种控制功能,保证运动轴的稳定运行。

SIMOTION D Winder 包应用介绍于长波摘要:SIMOTION提供了一个可以应用于大部分开卷曲功能的应用包,其中包含了多种控制方式,多种卷径计算方法以及张力锥度、断带检测等功能。
但全面的同时带来了应用结构复杂、参数众多等问题。
本文根据以往的调试经验对Winder包的应用进行一下应用介绍,分为卷曲的基本原理、控制方式、程序结构、应用步骤四个部分。
关键词:SIMOTION 开卷曲1 .开卷曲的基本原理开卷曲的控制要求可以概括为通过控制电机的转矩来控制材料上的张力,使张力不变或按照一定的曲线减小(即张力锥度)。
从电机转矩到材料张力,这之间存在以下影响因素。
首先就是卷径,这是开卷曲控制最重要的一个参数,对其要求就是“稳”和“准”。
卷径计算可以大致分为速比法、厚度累积法和外部测量法。
速比法是检测同一时刻下卷轴的转速和材料的线速度,两者相除即得到直径,这种方法实时性好,但稳定性欠佳。
在此基础上衍生出积分法和位置计算法,两者就是将一定时间内卷轴的角度位移与材料的位移相除,然后按一定的斜坡输出。
区别在于积分法是用速度的积分得到角度位移和材料位移,而位置计算法是直接取轴的位置值做计算。
这种方法稳定性好,实时性与直径计算的更新周期有关。
厚度累积法是根据卷轴的圈数和材料的厚度计算的一种方法,即卷轴每转一圈直径增加2倍的材料厚度,然后按照一定的斜坡输出。
这种方法稳定性非常好,但准确性与材料厚度的准确性有很大关系,这里所说的材料厚度并不是指材料本身的实际厚度,而是材料的实际厚度加上材料之间缝隙的厚度,即与松紧度有关。
外部测量法就是用传感器直接测量卷轴的实际直径,可分为接触式和非接触式,常见的接触式传感器有编码器和位移传感器,非接触测量传感器有激光、微波等。
由于测量数值与实际的直径可能是非线性的,所以要对测量值做非线性处理。
其次是对转矩的补偿,主要是加减速补偿和摩擦补偿。
加减速补偿指的是当材料在加速或减速时电机要提供额外的转矩对卷轴进行加减速,其大小与开卷曲机械系统的转动惯量和加减速度有关;其方向与工作方式(是开卷还是收卷)和出料方向(材料是在卷轴的上方还是下方)有关。
概述本文档通过一个实际项目来介绍SIMOTION项目组态、配置和编程的过程。
在SIMOTION SCOUT软件的安装包里提供了一个供初学者学习的项目“D435_BEGINNER”,该项目位于软件光盘路径...\Utilities_Applications\src\Examples\ExampleForBeginners文件夹内,该项目提供了完整的项目文件和介绍文档,该项目可以在SIMOTION D435 演示设备上模拟运行。
图1 项目实战图示该项目要实现的功能是将生产线上的空盒子吹出生产线,其工作过程如下:按下起动按钮后,盒子在传送带上从上游运输到下游,如果在运输途中被检测出是空的,那么载有喷嘴的吹出器会跟随空盒子运动,建立同步以后在指定的位置打开喷嘴将空盒子吹出传送带,然后吹出器重新返回等待位置。
在运行过程中,如果安全门被打开,那么生产线立即停止,在安全门关上以后,又自动恢复运行。
复位起动按钮后,生产线停止。
该项目中使用的运动控制功能有:• 齿轮同步Gearing• 凸轮同步Camming• 快速点输出Output Cam2项目中使用的硬件和软件2.1项目中使用的硬件项目使用的硬件基于SIMOTION D435(可以转换到其他SIMOTION硬件),具体的产品如下表所示。
表1 本项目所使用的硬件列表2.2项目中使用的软件表2 本项目所使用的软件列表3项目配置SIMOTION SCOUT项目的基本配置步骤如下:1. 配置驱动器2. 配置工艺对象TO3. 编写程序并分配执行系统4. 连接HMI设备3.1配置驱动器本项目中有两台电机,由双轴电机模块驱动,可以参考下载中心应用文档编号A0309(视频教程)来完成驱动器配置文档名称《SIMOTION D435调试入门》,其下载网址如下:/download/searchResult.aspx?searchText=A0309配置完成以后,可以将驱动重命名为conveyor和eject,项目如下图所示:图2 项目配置配置完成以后,重新进行对SIMOTION和SINAMICS进行下载并保存数据(Copy RAM to ROM)。
SIMOTION项目实战— D435 Beginner1概述本文档通过一个实际项目来介绍SIMOTION项目组态、配置和编程的过程。
在SIMOTION SCOUT软件的安装包里提供了一个供初学者学习的项目“D435_BEGINNER”,该项目位于软件光盘路径...\ Utilities_Applications\src\Examples\ExampleForBeginners文件夹内,该项目提供了完整的项目文件和介绍文档,该项目可以在SIMOTION D435 演示设备上模拟运行。
图1 项目实战图示该项目要实现的功能是将生产线上的空盒子吹出生产线,其工作过程如下:按下起动按钮后,盒子在传送带上从上游运输到下游,如果在运输途中被检测出是空的,那么载有喷嘴的吹出器会跟随空盒子运动,建立同步以后在指定的位置打开喷嘴将空盒子吹出传送带,然后吹出器重新返回等待位置。
在运行过程中,如果安全门被打开,那么生产线立即停止,在安全门关上以后,又自动恢复运行。
复位起动按钮后,生产线停止。
该项目中使用的运动控制功能有:•齿轮同步Gearing•凸轮同步Camming•快速点输出Output Cam2项目中使用的硬件和软件2.1项目中使用的硬件项目使用的硬件基于SIMOTION D435(可以转换到其他SIMOTION硬件),具体的产品如下表所示。
表1 本项目所使用的硬件列表2.2项目中使用的软件表2 本项目所使用的软件列表3项目配置SIMOTION SCOUT项目的基本配置步骤如下:1. 配置驱动器2. 配置工艺对象TO3. 编写程序并分配执行系统4. 连接HMI设备3.1配置驱动器本项目中有两台电机,由双轴电机模块驱动,可以参考下载中心应用文档编号A0309(视频教程)来完成驱动器配置文档名称《SIMOTION D435调试入门》,其下载网址如下:http: ///download/searchResult.aspx?searchText=A0309配置完成以后,可以将驱动重命名为conveyor和eject,项目如下图所示:图2 项目配置配置完成以后,重新进行对SIMOTION和SINAMICS进行下载并保存数据(Copy RAM toROM)。
SIMOTION项目实战— D435 Beginner1概述本文档通过一个实际项目来介绍SIMOTION项目组态、配置和编程的过程。
在SIMOTION SCOUT软件的安装包里提供了一个供初学者学习的项目“D435_BEGINNER”,该项目位于软件光盘路径...\ Utilities_Applications\src\Examples\ExampleForBeginners文件夹内,该项目提供了完整的项目文件和介绍文档,该项目可以在SIMOTION D435 演示设备上模拟运行。
图1 项目实战图示该项目要实现的功能是将生产线上的空盒子吹出生产线,其工作过程如下:按下起动按钮后,盒子在传送带上从上游运输到下游,如果在运输途中被检测出是空的,那么载有喷嘴的吹出器会跟随空盒子运动,建立同步以后在指定的位置打开喷嘴将空盒子吹出传送带,然后吹出器重新返回等待位置。
在运行过程中,如果安全门被打开,那么生产线立即停止,在安全门关上以后,又自动恢复运行。
复位起动按钮后,生产线停止。
该项目中使用的运动控制功能有:• 齿轮同步Gearing• 凸轮同步Camming• 快速点输出Output Cam2项目中使用的硬件和软件2.1项目中使用的硬件项目使用的硬件基于SIMOTION D435(可以转换到其他SIMOTION硬件),具体的产品如下表所示。
编号名称数量订货号/备注1 SIMOTION D435 1 6AU1435-0AA00-0AA1表1 本项目所使用的硬件列表2.2项目中使用的软件表2 本项目所使用的软件列表3项目配置SIMOTION SCOUT项目的基本配置步骤如下:1. 配置驱动器2. 配置工艺对象TO3. 编写程序并分配执行系统4. 连接HMI设备3.1配置驱动器本项目中有两台电机,由双轴电机模块驱动,可以参考下载中心应用文档编号A0309(视频教程)来完成驱动器配置文档名称《SIMOTION D435调试入门》,其下载网址如下:http: ///download/searchResult.aspx?searchText=A0309配置完成以后,可以将驱动重命名为conveyor和eject,项目如下图所示:图2 项目配置配置完成以后,重新进行对SIMOTION和SINAMICS进行下载并保存数据(Copy RAM to ROM)。
SIMOTION D在轧钢线板带激光焊机中的应用
SIMOTION D in steel rolling line plate with the
application of laser welding
刘千军
(武汉大族金石凯激光系统有限公司,武汉)
摘要:该论文主要介绍SIMOTION D在轧钢线板带激光焊机中的应用,充分利用SIMOTION的各种工艺对象,包括轴、多组同步对象、快速输入等,同时通过LAD编程方式实现全自动在线激光加工设备。
关键词:SIMOTION D,CU320,同步,快速输入,激光
Abstract: this paper mainly introduces SIMOTION D in steel rolling line plate with the application of laser welding, make full use of various process SIMOTION objects, including the axis of synchronous object, and quickly enter etc., and through the LAD programming realize automatic on-line laser processing equipment.
Key Words: SIMOTION D,CU320,Cam,MeasuringLnput,Laser
一、项目介绍
1、背景介绍
目前我国钢铁行业处于主导地位的典型冷轧工艺路线是:转炉冶炼一炉外精炼一初轧开坯一热连轧一酸洗一冷轧一退火一平整一镀锌(锡)一成产品。
在此典型的冷轧工艺中,板带焊接设备必不可少。
运行过程中,先行带尾与后行带头必需进行焊接,才能保证生产线的连续作业。
板带焊接的常用工艺有电弧焊、窄搭接焊、激光焊等几种,激光焊机至今为止全部是进口设备。
宜昌三峡全通涂镀板股份有限公司是以生产超薄涂镀板为主要产品的大型企业,为了降低设备采购成本,宜昌三峡全通涂镀板股份有限公司与武汉大族金石凯激光系统有限公司合作,武汉大族金石凯激光系统有限公司研发完成了国内首台板带激光焊机,不仅填补了该产品国内空白,而且还抑制了进口设备的价格。
2、设备组成
(图1)
板带激光焊机主要由以下四大部件组成:
1)机械部分:机械部分成T型,各装置名称及功能分别如下:★入口/出口活套装置:用于钢带的挡料,存储一定的钢带,方便对中。
★入口/出口夹送装置:用于钢带的送料,将带头、带尾准确送到主机的夹钳下,方便激光切割。
★入口/出口对中装置:一方面用于钢带宽度的自动测量;另一方面用于带头、带尾焊接前不错位,确保钢带的直线度。
★入口/出口提升装置:激光焊接合格后,钢带在理想的位置高速穿过该设备,从而保证该设备的稳定性和钢带的表面质量。
★打孔装置:将钢带激光焊接处打孔,作为标记。
★月牙剪:将不等宽的两卷钢带在焊接处剪切掉,使之圆滑过渡,不伤害下一工序的其他部件。
★主机:包括可以来回直线运动的C型架、焊缝检测装置、辅助动作的液压缸等;用于钢带的激光切割、焊接、焊缝检测功能。
2)液压站:由于该设备大多采用液压缸来实现相关动作,液压站为此提供动力源。
3)激光器:随C型架的来回移动,激光器为完成钢带带头、带尾的自动切割和焊接提供相应的激光功率。
4)操作台:通过HMI集中监控整台设备,具有手动、自动、监视、文档记录、报警等功能。
3、工艺简介
(图2)
1)带尾检测及移动:通过对带尾的两次检测配合出口夹送辊将带尾送到出口自动切割处;出口对中装置将带尾执行对中。
2)带头检测及移动:通过对带头的两次检测配合入口夹送辊将带头送到入口自动切割处;启动快速输入功能,对钢带宽度进行自动测量;然后运用入口对中装置将带头执行对中。
3)激光切割:当带尾、带头移动到相应位置时,根据要求将带尾、带头自动切割。
4)激光焊接:将切割合格后的带尾、带头进行自动拼接,然后根据要求
将带尾、带头自动焊接。
5)焊缝检测:将焊接后的钢带进行检测,判断是否合格,合格便通过出口夹送装置将钢带焊缝移动到打孔处打孔,作为焊缝标记;不合格自动将钢带切割,重复前面工作。
二、控制系统构成
(图3)
如图所示,控制系统核心控制器为SIMOTION D445,通过扩展CU320来实现完成11个伺服轴的控制,使用PROFIBUS DP作为通讯网络连接各部件,涉及的其他部件及功能如下:
1、伺服驱动和电机:选用SINAMICS S120书本型模块和1FT6伺服电
机,分别用于入口装置测量、对中;出口装置对中;焊缝拼接;C
型架;入口夹送装置;出口夹送装置。
使用SINAMICS驱动系统,
在控制上保证了同步和定位的精度。
2、人机界面:该设备配置了一个MP370 19”,实现集中控制、显示、
报警、归档、工艺配方等工作。
3、分布式I/O:配置SIMATAC ET200M模块,其中IM153-1和IM153-2
各一块,用于逻辑输入输出信号处理、模拟量信号处理。
4、轴扩展模块CU320:除了用于轴运动控制以外,还得实现入口/出
口夹送辊的全闭环控制、快速I/O测量等功能
三、控制系统完成的功能
1、使用CU320全局快速输入
项目中需要对钢带的宽度进行自动测量,我们使用了2个快速输入
功能,调试过程如下:
★在CU320的报文中选择SIEMENS telegram 392:从而激活6
个全局的快速测量功能,注意相对应的Input data。
(图4)
★在CU320的专家参数中,P680选择使用的快速输入点(如X122.8和X122.10),需要和TO_Measuring Input中设置的地址一一
对应。
(图5)
★在TO_Measuring Input中,Measuring_input_1 的HW address 和Bit number中分别输入521和1,设置快速测量输入点测量1(X122.8)。
(图6)
★同样的方法在Measuring_input_2 的HW address和Bit number中分别输如521和2,设置快速测量输入点测量2
(X122.10)。
★通过程序激活或不激活快速测量功能。
(图7)
2、同步功能
SIMOTION能实现定位轴的速度同步、多轴同步、相对和绝对的电子齿轮同步。
同步功能的实现首先是此轴在做轴配置时需激活同步
如:图8;其次时PLC程序中调用激活同步(_MC_CamIn)及取消
同步(_MC_GearOut)命令来完成。
根据工艺需要PLC程序可以随
时激活随时取消。
(图8)
3、编程
SIMOTION编程语言符合IEC61131-3标准,且包含I/O管理及过程
和机器控制所需的所有PLC命令。
程序可以用LAD(梯形图)、FBD
(功能结构图)、ST(结构文本)以及MCC(运动控制图)的形式
编制。
在此项目中主要采用的是LAD编程语言,涉及到的有增量
(_MC_MoveAdditive)、绝对(_MC_MoveAbsolute)、回零
(_MC_Home)、停止(_MC_Stop)、复位(_MC_Reset)、点动(_MC_Jog)、激活同步(_MC_CamIn)及取消同步(_MC_GearOut)等功能块,灵
活运用这些功能块,使整个项目具备了手动调试、自动运行功能。
在调用这些功能块时需要注意两点:
①、当同一个轴多次调用同一功能块时,不要同名,同名可能会导
致PLC程序不能重复循环。
②、调用功能块时EN端最好不要加条件,条件可以加在execute
端,如:
(图9)
四、项目运行
板带激光焊机与整条生产线经过上线调试,现已稳定运行。
各项技术指标达到了设计要求,焊缝断带率≤0.1%;拉力实验测试结果显示断裂都不发生在焊逢处。
生产节拍、焊接质量及整机稳定性均达到进口设备标准。
加上中文操作界面HMI,直观的动作指示、操作指南、报警提示、维修手册于一体,使设备更适应客户使用习惯,得到了客户的充分认可。
五、应用体会
本人一直以来都是从事数控系统的运用,有一定的运动控制基础,初次使用SIMOTION感觉还是比较容易上手的。
通过这台板带激光焊机的设计、调试,对SIMOTION有了较为深刻的理解,并掌握了SIMOTION的调试方法、应用范围、基本功能、编程技巧等。
跟SINUMERIK高档系统840D 比较,有可编程性强、操作方便、成本低、更适应生产线的优势。
冷轧工艺流程为:酸轧线:热轧卷—冷轧开卷机开卷—直头机直头—剪切头尾—焊机焊接—月牙剪切焊缝—进入口活套—破鳞机破鳞—酸洗槽—水洗槽—热风干燥—中间活套—月牙剪—圆盘剪—出口活套—进精轧机—测厚仪—卷取机卷取;退火线:酸轧卷—开卷机开卷—直头机—剪头尾—焊机焊接—月牙剪切焊缝—碱喷洗—碱刷洗—点解清洗—水刷洗—水喷洗—热风干燥—入口活套—退火炉预热—加热—均热—冷却—出口活套—平整机—圆盘剪—表面质量检查—静电涂油机—分切剪—卷取机;镀锌机组:酸轧卷或者退火卷—开卷机—直头机—切头剪—焊机—碱洗—水洗—入口活套—退火—锌锅—气刀—冷却塔—水淬槽—钝化处理—表面检查—静电涂油—分切剪—卷取机卷取。