控制工程基础-绪论
- 格式:ppt
- 大小:488.50 KB
- 文档页数:1
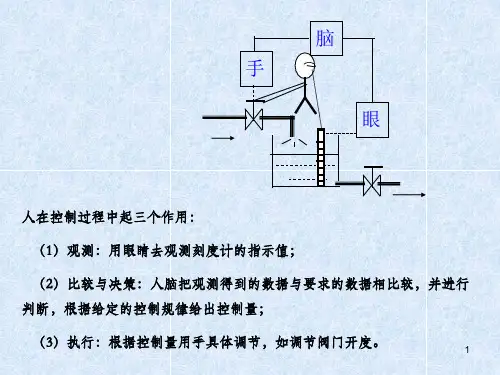
《控制工程基础》电子教案第一章:绪论1.1 课程介绍解释控制工程的定义、目的和重要性概述控制工程的应用领域和学科范围1.2 控制系统的基本概念介绍控制系统的定义和组成解释输入、输出、反馈和控制器的概念1.3 控制工程的历史和发展回顾控制工程的发展历程和重要里程碑讨论现代控制工程的挑战和发展趋势第二章:数学基础2.1 线性代数介绍矩阵、向量的基本运算和性质讲解线性方程组的求解方法2.2 微积分复习微积分的基本概念和公式讲解导数和积分的应用2.3 离散时间信号介绍离散时间信号的定义和特点讲解离散时间信号的运算和处理方法第三章:连续控制系统3.1 连续控制系统的概述介绍连续控制系统的定义和特点解释连续控制系统的应用领域3.2 传递函数讲解传递函数的定义和性质介绍传递函数的绘制和分析方法3.3 控制器设计讲解PID控制器和模糊控制器的原理和方法讨论控制器设计的考虑因素和优化方法第四章:离散控制系统4.1 离散控制系统的概述介绍离散控制系统的定义和特点解释离散控制系统的应用领域4.2 差分方程和离散传递函数讲解差分方程的定义和求解方法介绍离散传递函数的定义和性质4.3 控制器设计讲解离散PID控制器和模糊控制器的原理和方法讨论控制器设计的考虑因素和优化方法第五章:状态空间方法5.1 状态空间模型的概述介绍状态空间模型的定义和特点解释状态空间模型的应用领域5.2 状态空间方程讲解状态空间方程的定义和求解方法介绍状态空间方程的稳定性分析5.3 状态控制器设计讲解状态控制器的原理和方法讨论状态控制器设计的考虑因素和优化方法第六章:频域分析6.1 频率响应介绍频率响应的定义和作用讲解频率响应的实验测量方法6.2 频率特性分析系统频率特性的性质和图形讨论频率特性对系统性能的影响6.3 滤波器设计讲解滤波器的基本类型和设计方法分析不同滤波器设计指标的选择和计算第七章:数字控制系统7.1 数字控制系统的概述介绍数字控制系统的定义和特点解释数字控制系统的应用领域7.2 数字控制器设计讲解Z变换和反变换的基本原理介绍数字PID控制器和模糊控制器的设计方法7.3 数字控制系统的仿真与实现讲解数字控制系统的仿真方法和技术讨论数字控制系统的实现和优化第八章:非线性控制系统8.1 非线性系统的概述介绍非线性系统的定义和特点解释非线性系统的应用领域8.2 非线性模型和分析方法讲解非线性系统的建模方法和分析技术分析非线性系统的稳定性和可控性8.3 非线性控制策略讲解非线性PID控制器和模糊控制器的原理和方法讨论非线性控制策略的设计和优化第九章:鲁棒控制9.1 鲁棒控制的概述介绍鲁棒控制的定义和目的解释鲁棒控制在控制工程中的应用领域9.2 鲁棒控制设计方法讲解鲁棒控制的基本设计和评估方法分析不同鲁棒控制策略的性能和特点9.3 鲁棒控制在实际系统中的应用讲解鲁棒控制在工业和航空航天等领域的应用案例讨论鲁棒控制在实际系统中的挑战和限制第十章:控制系统的设计与实践10.1 控制系统的设计流程讲解控制系统设计的基本流程和方法分析控制系统设计中的关键环节和技术选择10.2 控制系统实践案例分析不同控制系统实践案例的设计和实现过程讲解控制系统实践中的注意事项和优化方法10.3 控制系统的发展趋势讨论控制系统未来的发展方向和挑战分析新兴控制技术和方法在控制系统中的应用前景重点和难点解析重点环节1:控制系统的基本概念和组成控制系统定义和组成的理解输入、输出、反馈和控制器的相互作用重点环节2:传递函数和控制器设计传递函数的定义和性质PID控制器和模糊控制器的设计方法和应用重点环节3:差分方程和离散传递函数差分方程的求解方法离散传递函数的定义和性质重点环节4:状态空间模型的建立和分析状态空间方程的定义和求解状态空间模型的稳定性和可控性分析重点环节5:频率响应和滤波器设计频率响应的实验测量和分析滤波器设计方法和应用重点环节6:数字控制系统和控制器设计Z变换和反变换的应用数字PID控制器和模糊控制器的设计方法重点环节7:非线性系统的建模和控制策略非线性系统的建模方法非线性控制策略的设计和优化重点环节8:鲁棒控制的设计和评估鲁棒控制的基本设计和评估方法鲁棒控制策略的性能和特点重点环节9:控制系统的设计流程和实践案例控制系统设计的基本流程和方法控制系统实践案例的设计和实现过程重点环节10:控制系统的发展趋势和新兴技术控制系统未来的发展方向新兴控制技术和方法在控制系统中的应用前景本教案涵盖了控制工程基础的十个重点环节,包括控制系统的基本概念和组成、传递函数和控制器设计、差分方程和离散传递函数、状态空间模型的建立和分析、频率响应和滤波器设计、数字控制系统和控制器设计、非线性系统的建模和控制策略、鲁棒控制的设计和评估、控制系统的设计流程和实践案例以及控制系统的发展趋势和新兴技术。
《控制工程基础》电子教案第一章:绪论1.1 课程介绍了解控制工程的概念、内容和研究方法理解控制工程在工程实践中的应用和重要性1.2 控制系统的基本概念定义系统、输入、输出和反馈区分开环系统和闭环系统1.3 控制工程的目标掌握稳定性、线性、非线性和时变性等控制系统的特性学习控制系统的设计方法和步骤第二章:数学基础2.1 线性代数基础掌握向量、矩阵和行列式的基本运算学习线性方程组和特征值、特征向量的求解方法2.2 微积分基础复习极限、连续性和微分、积分的基本概念和方法应用微积分解决实际问题2.3 复数基础了解复数的概念、代数表示法和几何表示法学习复数的运算规则和复数函数的性质第三章:控制系统分析3.1 传递函数定义传递函数的概念和性质学习传递函数的绘制和解析方法3.2 频率响应分析理解频率响应的概念和特点应用频率响应分析方法评估系统的性能3.3 根轨迹分析掌握根轨迹的概念和绘制方法分析根轨迹对系统稳定性的影响第四章:控制系统设计4.1 控制器设计方法学习PID控制器的设计原理和方法了解模糊控制器和神经网络控制器的设计方法4.2 控制器参数调整掌握控制器参数调整的目标和方法应用Ziegler-Nichols方法和频域方法进行参数调整4.3 系统校正和优化理解系统校正的概念和目的学习常用校正方法和优化技术第五章:现代控制理论5.1 状态空间描述了解状态空间的概念和表示方法学习状态空间方程的求解和状态反馈控制5.2 状态估计和最优控制掌握状态估计的概念和方法学习最优控制的目标和求解方法5.3 鲁棒控制和自适应控制理解鲁棒控制的概念和特点了解自适应控制的设计方法和应用场景第六章:线性系统的稳定性分析6.1 稳定性的定义和性质理解系统稳定性的概念和重要性学习稳定性分析的基本方法6.2 劳斯-赫尔维茨准则掌握劳斯-赫尔维茨准则的原理和应用应用劳斯-赫尔维茨准则判断系统的稳定性6.3 李雅普诺夫方法了解李雅普诺夫方法的原理和分类学习李雅普诺夫第一和第二方法判断系统的稳定性第七章:线性系统的控制器设计7.1 控制器设计概述理解控制器设计的目标和重要性学习控制器设计的基本方法7.2 PID控制器设计掌握PID控制器的设计原理和方法应用PID控制器进行系统控制7.3 状态反馈控制器设计了解状态反馈控制器的设计原理和方法学习状态反馈控制器的设计和应用第八章:非线性控制系统分析8.1 非线性系统概述理解非线性系统的概念和特点学习非线性系统分析的基本方法8.2 非线性系统的描述方法学习非线性系统的数学模型和描述方法应用非线性系统分析方法研究系统的性质8.3 非线性控制系统的应用了解非线性控制系统在工程实践中的应用学习非线性控制系统的设计和优化方法第九章:鲁棒控制理论9.1 鲁棒控制概述理解鲁棒控制的概念和重要性学习鲁棒控制的基本方法9.2 鲁棒控制设计方法掌握鲁棒控制设计的原则和方法应用鲁棒控制设计方法设计控制器9.3 鲁棒控制在控制系统中的应用了解鲁棒控制在实际控制系统中的应用学习鲁棒控制在控制系统中的设计和优化方法第十章:控制系统仿真与实验10.1 控制系统仿真概述理解控制系统仿真的概念和重要性学习控制系统仿真的基本方法10.2 MATLAB控制系统仿真掌握MATLAB控制系统仿真工具的使用应用MATLAB进行控制系统仿真和分析10.3 控制系统实验了解控制系统实验的目的和重要性学习控制系统实验的方法和技巧重点和难点解析重点环节1:控制系统的基本概念和特性控制系统的基本概念,包括系统、输入、输出和反馈区分开环系统和闭环系统掌握稳定性、线性、非线性和时变性等控制系统的特性重点环节2:传递函数和频率响应分析传递函数的概念和性质,传递函数的绘制和解析方法频率响应的概念和特点,频率响应分析方法分析根轨迹对系统稳定性的影响重点环节3:控制器设计方法和参数调整控制器设计方法,包括PID控制器、模糊控制器和神经网络控制器的设计原理和方法控制器参数调整的目标和方法,应用Ziegler-Nichols方法和频域方法进行参数调整重点环节4:状态空间描述和最优控制状态空间的概念和表示方法,状态空间方程的求解和状态反馈控制状态估计和最优控制的目标和求解方法重点环节5:非线性控制系统分析和鲁棒控制理论非线性系统的概念和特点,非线性系统分析的基本方法鲁棒控制的概念和重要性,鲁棒控制的基本方法重点环节6:控制系统仿真与实验控制系统仿真的概念和重要性,控制系统仿真的基本方法MATLAB控制系统仿真工具的使用,应用MATLAB进行控制系统仿真和分析控制系统实验的目的和重要性,控制系统实验的方法和技巧全文总结和概括:本教案涵盖了控制工程基础的十个章节,主要包括控制系统的基本概念和特性、传递函数和频率响应分析、控制器设计方法和参数调整、状态空间描述和最优控制、非线性控制系统分析和鲁棒控制理论以及控制系统仿真与实验。