SPI通信
- 格式:doc
- 大小:47.50 KB
- 文档页数:5
spi通信协议SPI(Serial Peripheral Interface)串行外设接口是一种同步的、全双工的通信协议,常用于单片机和外部设备之间的通信。
SPI协议定义了一种主从模式的通信方式,其中一个设备充当主设备,负责发起通信,而其他设备则充当从设备,负责接收和处理通信数据。
SPI通信协议由四根线组成:时钟线(CLK)、片选线(SS)、主设备发出数据(MOSI)和主设备接收数据(MISO)。
在SPI通信中,主设备通过时钟线提供时钟脉冲,通过片选线选择和控制不同的从设备。
在通信开始时,主设备将片选线拉低,选择需要通信的从设备。
然后,主设备在每个时钟脉冲中,通过MOSI线发送数据给从设备,同时从设备通过MISO线将数据发送回主设备。
SPI通信协议的通信方式为全双工,即主设备和从设备可以同时发送和接收数据。
在通信过程中,主设备和从设备通过时钟的同步来保持数据的一致性。
主设备在上升沿将数据发送到MOSI线上,而从设备在下降沿将数据从MISO线上读取。
通过时钟的同步,主从设备可以准确地发送和接收数据。
在SPI通信中,数据的传输是串行的,即每个数据位都按顺序传输。
通信的起始位和终止位可以由主设备和从设备约定。
通常情况下,通信的起始位由主设备发起,并在时钟上升沿进行传输。
终止位可以由主设备或从设备发起,并在时钟下降沿进行传输。
SPI通信协议的速度可以通过调整时钟频率来控制。
时钟频率越高,数据传输的速度越快。
然而,时钟频率的增加也会增加信号的噪声和功耗。
因此,在选择时钟频率时,需要权衡速度和可靠性的要求。
SPI通信协议还支持多个从设备的通信。
每个从设备都有一个独立的片选线,主设备可以通过选择不同的片选线来与不同的从设备进行通信。
这种多从设备的通信方式使SPI协议更加灵活,可以同时与多个外部设备进行数据交换。
综上所述,SPI通信协议是一种常用的串行通信协议,使用主从模式进行数据交换。
它具有简单、可靠、高速的特点,适用于单片机和外部设备之间的通信。
STM32---SPI通信的总结(库函数操作)本文主要由7项内容介绍SPI并会在最后附上测试源码供参考:1. SPI 的通信协议2. SPI通信初始化(以STM32为从机,LPC1114为主机介绍)3. SPI 的读写函数4. SPI 的中断配置5. SPI 的SMA 操作6. 测试源码7. 易出现的问题及原因和解决方法一、SPI 的通信协议SPI(Serial Peripheral Interfac)是一种串行同步通讯协议,由一个主设备和一个或多个从设备组成,主设备启动一个与从设备的同步通讯,从而完成数据的交换。
SPI接口一般由4根线组成,CS片选信号(有的单片机上也称为NSS), SCLK时钟信号线,MISO数据线(主机输入从机输出),MOSI 数据线(主机输出从机输入),CS 决定了唯一的与主设备通信的从设备,如没有CS 信号,则只能存在一个从设备,主设备通过产生移位时钟信号来发起通讯。
通讯时主机的数据由MISO输入,由MOSI 输出,输入的数据在时钟的上升或下降沿被采样,输出数据在紧接着的下降或上升沿被发出(具体由SPI的时钟相位和极性的设置而决定)二、以STM32为例介绍SPI通信1. STM32f103带有3个SPI模块其特性如下:2221 SPI 特征■ 3线全双工冋步棲输•帯或不帯第二根双向数按线的职线鴨工同步性输•8或16位传输帧格式选提■主或从操种•支持多主模式•8个丄模式波特率预分频系数(最大为fpcix/2)•从摸戒频最大为fpcLx/2)•主橈式和从模式的快連通缶:摄大SPI速度达到18MHz•卜:模式和从模式卜均可以由牧件或硬什进行NSS管理]I /从操作摸式的动态改变•可编程的吋钟极性和相位•可编程的数据顺斥・MSB在刑或LSB在前•可触竝中凝的专用笈送和接收标蛊•SPIS线忙状态様志•龙持可靠通陆的硬fICRC2 SPI初始化初始化SPI主要是对SPI要使用到的引脚以及SPI通信协议中时钟相位和极性进行设置,其实STM32的工程师已经帮我们做好了这写工作,调用库函数,根据自己的需要来修改其中的参量来完成自己的配置即可,主要的配置是如下几项:引脚的配置SPI1 的SCLK, MISO ,MOSI 分别是PA5, PA6, PA7 弓I脚,这几个弓I 脚的模式都配置成GPIO_Mode_AF_PP复用推挽输出(关于GPIO 的8种工作模式如不清楚请自己百度,在此不解释),如果是单主单从,CS引脚可以不配置,都设置成软件模式即可。
2.1、SPI:高速同步串行口SPI:高速同步串行口。
是一种标准的四线同步双向串行总线。
SPI,是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。
是Motorola首先在其MC68HCXX系列处理器上定义的。
SPI接口主要应用在 EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。
SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议,比如AT91RM9200.SPI总线系统是一种同步串行外设接口,它可以使MCU与各种外围设备以串行方式进行通信以交换信息。
外围设置FLASHRAM、网络控制器、LCD显示驱动器、A/D转换器和MCU等。
SPI总线系统可直接与各个厂家生产的多种标准外围器件直接接口,该接口一般使用4条线:串行时钟线(SCK)、主机输入/从机输出数据线MISO、主机输出/从机输入数据线MOSI和低电平有效的从机选择线SS(有的SPI接口芯片带有中断信号线INT、有的SPI接口芯片没有主机输出/从机输入数据线MOSI)。
SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(用于单向传输时,也就是半双工方式)。
也是所有基于SPI的设备共有的,它们是SDI(数据输入),SDO(数据输出),SCK(时钟),CS(片选)。
(1)SDO –主设备数据输出,从设备数据输入(2)SDI –主设备数据输入,从设备数据输出(3)SCLK –时钟信号,由主设备产生(4)CS –从设备使能信号,由主设备控制其中CS是控制芯片是否被选中的,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),对此芯片的操作才有效。
spi通讯协议SPI(Serial Peripheral Interface)是一种同步串行通信协议,常用于连接微控制器和外部设备,如传感器、存储器、显示器等。
它采用主从结构,通过时钟信号和数据线进行双向通信,具有高速传输、简单灵活的特点,广泛应用于各种嵌入式系统。
SPI通信协议使用四根线进行通信:CLK(时钟线)、MOSI (主输出从输入线)、MISO(主输入从输出线)和SS(从选择线)。
时钟线由主设备产生,用于同步数据传输。
MOSI和MISO线负责数据传输,MOSI线由主设备输出数据,MISO线由从设备输出数据。
SS线由主设备控制,用于选择特定的从设备进行通信。
SPI通信协议是一种全双工通信方式,数据可以同时在MOSI和MISO线上传输。
通信过程中,主设备通过产生时钟信号控制数据传输的时序,每个时钟周期传输一个比特位。
主设备将数据送入MOSI线上,并将其与时钟信号同步,从设备通过MISO线上的数据响应主设备。
SPI通信协议中可以有多个从设备存在,但每个从设备都需要一个单独的片选信号控制。
主设备通过拉低某个从设备的片选信号(SS线),来选择特定的从设备进行通信。
通信结束后,主设备释放片选信号,并选择其他从设备进行通信。
这样可以实现多个从设备与一个主设备之间的并行通信。
SPI通信协议的速度可以根据实际需求进行调整,由主设备产生的时钟信号决定了数据传输的速率。
时钟信号的频率可以在主设备中设置,通常可以选择几十kHz至几十MHz的范围。
通信速度越快,数据传输的速率越高,但同时也会增加功耗和干扰的风险。
SPI通信协议具有以下优点:首先,它具有高速传输的优势,可以满足大部分实时性要求较高的应用场景。
其次,SPI通信协议的硬件实现比较简单,可以使用几个GPIO口实现。
最后,SPI通信协议支持全双工通信,可以同时进行数据的发送和接收,提高通信效率。
综上所述,SPI通信协议是一种快速、灵活且简单的串行通信协议,广泛应用于各种嵌入式系统。
spi通信原理SPI(串行外围接口,Serial Peripheral Interface)是一种常见的半双工、同步串行通信总线接口(bus interface)。
它由一个正极性信号线(CS,Chip Select),一个时钟信号线(SCK,Serial Clock),一个向下发出数据线(MOSI,Master Out-Slave In)和一个向上接收数据线(MISO,Master In-Slave Out)构成,可用于微分模式或模拟模式通信,且具有较高的数据传输率和节点连线数,是一种主从(Master-Slave)式的串行数据传输标准。
一、SPI通信原理1、工作模式SPI接口通信模式有三种,分别是主模式(Master Mode)、从模式(Slave Mode)和双向模式(Bi-directional Mode),根据两个彼此连接的电路是主端还是从端,其工作模式就可以分别确定。
(1)主模式主模式有总线的控制权,它是总线的主导者,其发送时钟信号控制总线,由它读取从模式器件入端口的字节数据或者写入数据到从模式器件出端口,它一般兼顾发送和接收两种操作,并且在发送和接收都有数据缓存能力;(2)从模式从模式段缺少时钟和控制信号,从模式由主模式发送的时钟信号控制总线,从模式只能够等待主模式的唤醒,接收到主模式发来的时钟脉冲,才能工作;数据传输中,从模式由主模式发来的数据控制信号中控制自身的行为,从模式接收到数据,可能直接或间接地存储在从模式自身的缓冲位;(3)双向模式双向模式下,两电路当守护者和执行者双重角色,类似主模式,双向模式的总线可以实现双向同时收发数据功能,这也是SPI最重要的一个特点之一;2、信号线(1)CS: Chip Select,片选信号,由主机向从机发送,表示仪器的开始和结束信号;(2)SCK: Serial Clock,系统时钟信号,由主机向从机发送,控制数据的传输;(3)MOSI: Master Out Slave In,主机输出从机输入,由主机向从机发送;(4)MISO: Master In Slave Out,主机输入从机输出,由从机向主机发送;3、总线收发:1)主机向外设发送起始信号CS并向外设发出一个脉冲,外设将收到控制信号,从而开始读写操作;2)主机向外设发送时钟信号SCK,外设收到时钟信号后,可以进行一般主机传入和传出操作;3)主机发出信号来控制从机发出数据,从机受到数据标识,可以开始向主机发送数据,主机则接收从机发出的数据;4)当数据传送完毕后,起始信号CS将放低,SCK亦会放低,外设再将已写完信息的SS连接信号拉高;5)最后,外设会结束数据的读取和写入,同时将SS。
单片机SPI通信实现SPI(Serial Peripheral Interface)是一种常见的串行通信接口,它用于在电子设备之间进行数据传输。
在单片机中,SPI通信常用于连接外部设备,如传感器、存储器或其他微控制器。
本文将介绍如何在单片机中实现SPI通信。
一、SPI通信的基本原理SPI通信包括一个主设备(MCU)和一个或多个从设备之间的通信。
通常,SPI使用四根信号线实现通信:1. 时钟线(SCLK):用于主设备提供时钟信号,同步主设备和从设备的数据传输。
2. 主输出,从输入线(MISO):用于主设备发送数据给从设备,并由从设备接收数据。
3. 主输入,从输出线(MOSI):用于主设备接收从设备发送的数据。
4. 片选线(SS):用于选择与主设备通信的特定从设备。
SPI通信是全双工的,意味着主设备和从设备可以同时发送和接收数据。
通信的过程如下:1. 主设备发送时钟信号给从设备。
2. 主设备通过MOSI线发送数据给从设备。
3. 从设备通过MISO线接收主设备发送的数据。
4. 从设备可以通过MISO线发送数据给主设备。
二、硬件设置在单片机中实现SPI通信,需要根据具体芯片型号和开发板的硬件接口进行设置。
通常需配置以下参数:1. SPI模式:SPI通信有四种模式,根据通信的时钟极性和相位来确定。
要根据所连接的设备要求选择适当的SPI模式。
2. 数据位长度:确定通信中每个数据包的位数。
3. 时钟频率:选择与所连接设备的最大通信频率兼容的时钟频率。
三、代码实现以下是一个示例代码,用于在单片机中实现SPI通信:```c#include <avr/io.h>void SPI_MasterInit(){// 设置引脚方向:SCLK, MOSI和SS作为输出引脚,MISO作为输入引脚DDRB = (1 << DDB5) | (1 << DDB3) | (1 << DDB2);// 使能SPI,并设置为主设备模式,设置时钟频率为fck/4SPCR = (1 << SPE) | (1 << MSTR);}void SPI_MasterTransmit(uint8_t data){// 启动数据传输SPDR = data;// 等待传输完成while (!(SPSR & (1 << SPIF)));}int main(void){// 初始化SPI主设备SPI_MasterInit();// 主设备发送数据SPI_MasterTransmit(0x55); // 发送0x55 return 0;}```以上代码是一个简单的SPI主设备配置和数据发送的示例,具体代码实现需要根据所使用的单片机型号和开发环境进行相应修改。
1 SPI通信SPI信号线:一般的SPI接口使用4条信号线与外围设备接口,其具体功能如下:∙SCLOCK:主机的时钟线,为数据的发送和接收提供同步时钟信号。
每一位数据的传输都需要1次时钟作用,因而发送或接收1个字节的数据都需要8个时钟作用。
主机的时钟可以通过固件进行设置,并和从机的时钟线相连。
∙MISO:主机输入/从机输出数据线。
主机的MOSO应与从机的发送数据端相连,进行高位在前的数据交换。
∙SS:低电平有效的从机选择线。
当该线置低时,才能跟从机进行通信。
SPI工作模式:SPI的工作模式分为:主模式和从模式。
∙主模式的特点是不论发送还是接收始终有SCLOCK信号,SS信号不是必需的,由于SPI只能有一个主机,因而不存在主机的选择问题。
∙从模式的特点是无论发送还是接收必须在时钟信号SCLOCK的作用下才能进行,并且SS信号必须有效。
不论是在主模式下还是在从模式下,都要在时钟极性和时钟相位的配合下才能有效的完成一次数据传输。
2 SPI接口的单线应用在标准的SPI接口间进行通信时,SPI总线的四条信号线中:主机SCLOCK与从机SCLOCK相连;主机MISO与从机MOSI相连;主机MOSI与从机MISO 相连;主机控制信号线与从机的SS相连。
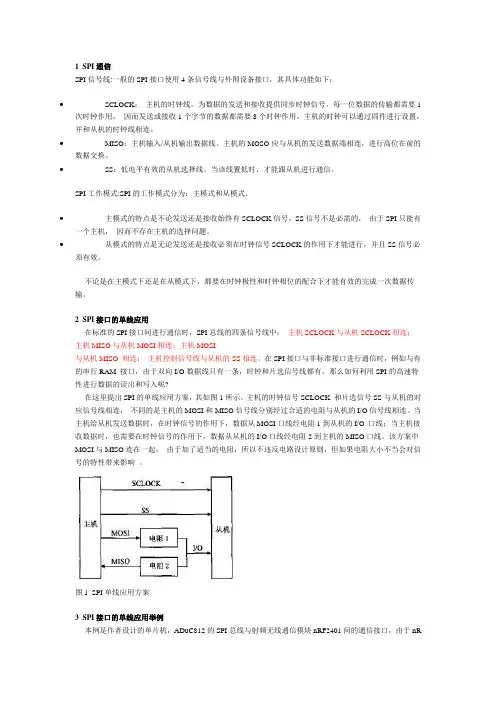
在SPI接口与非标准接口进行通信时,例如与有的串行RAM 接口,由于双向I/O数据线只有一条,时钟和片选信号线都有,那么如何利用SPI的高速特性进行数据的读出和写入呢?在这里提出SPI的单线应用方案,其如图1所示。
主机的时钟信号SCLOCK 和片选信号SS与从机的对应信号线相连,不同的是主机的MOSI和MISO信号线分别经过合适的电阻与从机的I/O信号线相连。
当主机给从机发送数据时,在时钟信号的作用下,数据从MOSI口线经电阻1到从机的I/O 口线;当主机接收数据时,也需要在时钟信号的作用下,数据从从机的I/O口线经电阻2到主机的MISO口线。
该方案中MOSI与MISO连在一起,由于加了适当的电阻,所以不违反电路设计原则,但如果电阻大小不当会对信号的特性带来影响。
spi 协议SPI协议。
SPI(Serial Peripheral Interface)是一种同步串行数据通信协议,通常用于在微控制器和外围设备之间进行通信。
SPI协议是一种全双工、点对点、串行通信协议,它使用四根线进行通信,包括时钟线(SCLK)、数据线(MOSI)、数据线(MISO)和片选线(SS)。
SPI协议的工作原理是通过主从模式进行通信,一个主设备可以连接多个从设备。
在通信过程中,主设备通过时钟线产生时钟信号,控制数据的传输速率,同时通过片选线选择要与之通信的从设备。
从设备在接收到片选信号后,根据时钟信号同步数据的传输,从而实现数据的传输和接收。
SPI协议的通信方式较为灵活,数据传输的速率可以根据具体的应用需求进行调整。
同时,SPI协议的通信是全双工的,主设备和从设备可以同时发送和接收数据,提高了通信效率。
此外,SPI协议的硬件连接简单,只需要四根线即可完成通信,因此在一些资源受限的应用场景中具有一定的优势。
在使用SPI协议进行通信时,需要注意一些问题。
首先,由于SPI协议是一种同步通信协议,主设备和从设备之间的时钟频率需要一致,否则会导致通信错误。
其次,由于SPI协议是一种点对点通信协议,因此在连接多个从设备时,需要合理设计片选信号的分配,避免片选信号的冲突。
最后,SPI协议在传输过程中没有错误检测和纠正机制,因此在一些对通信可靠性要求较高的应用场景中,需要额外考虑数据的校验和重传机制。
总的来说,SPI协议是一种灵活、高效的串行通信协议,适用于在微控制器和外围设备之间进行数据通信。
在实际应用中,需要根据具体的应用需求合理选择通信协议,并结合硬件设计和软件开发进行系统设计。
希望本文对SPI协议有一个清晰的认识,并能够在实际应用中发挥作用。
spi通信协议SPI通信协议。
SPI(Serial Peripheral Interface)是一种用于串行通信的同步协议,通常用于连接微控制器和外围设备,比如存储器芯片、传感器、显示屏等。
SPI通信协议具有高速传输、简单灵活、可靠稳定等特点,因此在各种嵌入式系统中得到广泛应用。
SPI通信协议由四根信号线组成,时钟线(SCK)、主端输出从端输入线(MOSI)、主端输入从端输出线(MISO)和片选线(SS)。
其中,时钟线由主设备控制,用于同步数据传输;MOSI和MISO分别用于主设备向从设备发送数据和从设备向主设备发送数据;片选线用于选择从设备,可以有多个从设备,通过片选线来选择具体的从设备进行通信。
SPI通信协议的工作方式是通过时钟线的上升沿或下降沿来触发数据的传输,主设备向MOSI线发送数据,从设备通过MISO线返回数据。
通信过程中,主设备和从设备通过时钟线同步,保证数据的可靠传输。
SPI通信协议支持全双工和半双工通信,可以实现双向数据传输,同时具有较高的传输速度。
在实际应用中,SPI通信协议常用于各种外围设备和微控制器之间的通信。
比如,存储器芯片可以通过SPI接口与微控制器进行数据交换,传感器可以通过SPI 接口向微控制器发送采集的数据,显示屏可以通过SPI接口接收微控制器发送的显示数据。
SPI通信协议的简单灵活、高速传输以及可靠稳定的特点,使得它在嵌入式系统中得到广泛应用。
需要注意的是,在使用SPI通信协议时,需要根据具体的外围设备和微控制器的规格来配置时钟频率、数据格式、传输模式等参数,以保证通信的稳定可靠。
此外,由于SPI通信协议没有定义数据包的格式和校验机制,因此在实际应用中需要通过软件协议来确保数据的正确传输和解析。
总的来说,SPI通信协议是一种简单灵活、高速传输、可靠稳定的串行通信协议,适用于各种外围设备和微控制器之间的数据交换。
在嵌入式系统中,SPI通信协议发挥着重要作用,为各种设备之间的通信提供了可靠的技术支持。
单片机中的SPI通信协议详解与应用案例SPI(Serial Peripheral Interface)是一种全双工、同步的串行通信协议,广泛应用于单片机与外围设备之间的通信。
本文将详细介绍SPI 通信协议的工作原理、通信格式以及在单片机应用中的实际案例。
### 一、SPI通信协议的工作原理SPI通信协议通常由一个主设备(Master)和一个或多个从设备(Slave)组成。
主设备负责发起通信并控制通信的时序,从设备则根据主设备的指令进行响应。
SPI通信使用四根线进行连接,包括时钟线(SCLK)、主设备输出从设备输入线(MOSI)、主设备输入从设备输出线(MISO)以及片选线(SS)。
在SPI通信中,通信双方通过时钟线同步数据传输,主设备在时钟信号的上升沿或下降沿触发数据传输,而从设备在时钟信号的相反沿进行数据接收。
此外,通过片选线可以选择与主设备进行通信的特定从设备,避免多个从设备同时响应。
### 二、SPI通信协议的通信格式在SPI通信中,数据传输的格式包括数据位数、传输顺序和时钟极性等方面的参数。
常见的SPI通信格式包括数据位宽(1~16位)、传输顺序(MSB first或LSB first)以及时钟极性(空闲时钟高电平或低电平)等。
数据传输过程中,主设备通过时钟线向从设备发送时钟信号,并同时通过MOSI线发送数据,从设备则通过MISO线接收并响应数据。
SPI通信中一般采用全双工通信方式,即主设备和从设备可以同时发送和接收数据。
### 三、SPI通信协议的应用案例SPI通信协议在单片机应用中具有广泛的应用场景,例如与外部存储器、传感器、显示屏等外围设备进行通信。
下面以单片机与外部存储器的通信为例,介绍SPI通信协议的应用过程。
1. 初始化SPI通信:配置主设备和从设备的通信参数,包括时钟频率、传输格式等,以确保通信双方能够正常进行数据传输。
2. 选中从设备:通过片选线选择要与主设备通信的具体从设备,避免多个从设备同时响应导致通信错误。
spi通信原理SPI通信原理。
SPI(Serial Peripheral Interface)是一种全双工的通信协议,通常用于在微控制器和外围设备之间进行数据传输。
它是一种同步串行通信协议,通过四根线进行通信,包括一个主设备和一个或多个从设备。
SPI通信协议在许多嵌入式系统中被广泛应用,因为它具有高速传输、简单的硬件连接和灵活的通信方式等优点。
SPI通信的原理非常简单,主要包括时钟信号、数据输入、数据输出和片选信号等几个关键部分。
下面我们将逐一介绍SPI通信的原理和工作方式。
首先,SPI通信协议是一种同步通信协议,它需要一个时钟信号来同步主设备和从设备之间的数据传输。
时钟信号由主设备产生,并且在数据传输的过程中始终保持稳定。
这样可以确保数据在传输过程中不会出现错误,保证通信的可靠性和稳定性。
其次,SPI通信需要同时进行数据输入和数据输出。
主设备通过数据输入线向从设备发送数据,同时从设备通过数据输出线向主设备返回数据。
这种全双工的通信方式可以实现数据的双向传输,提高了通信效率和灵活性。
另外,SPI通信中还包括片选信号。
片选信号用于选择需要进行通信的从设备,当主设备需要与某个从设备进行通信时,它会将该从设备的片选信号拉低,表示开始通信;通信结束后,片选信号会被拉高,表示通信结束。
通过片选信号,可以实现主设备与多个从设备之间的独立通信,提高了系统的可扩展性。
最后,SPI通信协议的工作方式非常灵活。
它可以通过软件和硬件来实现,主设备和从设备之间的通信速率、数据格式和传输模式等都可以根据实际需求进行配置和调整。
这使得SPI通信协议适用于各种不同的应用场景,包括存储器、传感器、显示器等多种外围设备。
总的来说,SPI通信协议是一种简单、高效、灵活的通信方式,它在许多嵌入式系统中得到广泛应用。
通过理解SPI通信的原理和工作方式,我们可以更好地设计和应用SPI接口的外围设备,提高系统的性能和可靠性。
希望本文对您理解SPI通信原理有所帮助,如果您对SPI通信协议还有其他疑问,欢迎留言讨论。
单片机中的SPI通信原理与实现SPI通信(Serial Peripheral Interface)是一种常用的串行通信协议,在单片机中广泛使用。
本文将介绍SPI通信的原理和实现方法。
一、SPI通信原理SPI通信采用主从方式,通常由一个主设备和多个从设备组成。
主设备负责控制通信的发起和结束,而从设备则被动地接收和发送数据。
SPI通信基于四根线(时钟、主输出从输入(MOSI)、主输入从输出(MISO)、片选(CS))进行数据传输。
具体步骤如下:1. 主设备通过片选信号选择对应的从设备。
2. 主设备产生时钟信号,控制数据的传输。
3. 主设备将数据通过MOSI线发送给从设备。
4. 从设备将数据通过MISO线返回给主设备。
5. 数据传输完成后,主设备通过片选信号取消对从设备的选择。
SPI通信工作在全双工模式下,即主设备和从设备可以同时发送和接收数据。
通过时钟信号的同步,确保数据的可靠传输。
二、SPI通信实现方法在单片机中实现SPI通信,需要根据具体的开发平台和编程语言来进行配置和编码。
下面以Arduino为例,介绍SPI通信的实现步骤。
1. 引入SPI库在Arduino IDE中,引入SPI库,并通过include语句告知编译器要使用SPI库函数。
2. 初始化SPI在setup函数中,使用SPI.begin()函数初始化SPI通信,并设置主设备的通信速率(默认为4MHz)和片选引脚。
3. 选择从设备在发送数据之前,通过SPI.beginTransaction()函数选择对应的从设备。
该函数需要传入配置参数,包括通信速率、MSB(Most Significant Bit,最高有效位)、SPI模式等。
4. 发送数据使用SPI.transfer()函数向从设备发送数据,并通过MOSI线传输。
该函数返回从设备传回的数据。
5. 接收数据使用SPI.transfer()函数接收从设备返回的数据,并通过MISO线传输。
spi通讯协议SPI通讯协议。
SPI(Serial Peripheral Interface)是一种同步串行数据通信协议,通常用于在嵌入式系统中连接微控制器和外围设备。
SPI通讯协议具有高速传输、简单硬件接口和灵活性等特点,因此在许多应用中得到了广泛的应用。
SPI通讯协议由四根信号线组成,时钟线(SCLK)、主输入/输出线(MISO)、主输出/输入线(MOSI)和片选线(SS)。
其中,时钟线由主设备控制,用于同步数据传输;主输入/输出线用于从从设备向主设备传输数据;主输出/输入线用于从主设备向从设备传输数据;片选线用于选择从设备。
SPI通讯协议的工作方式如下,首先,主设备通过片选线选择特定的从设备;然后,主设备通过时钟线向从设备发送时钟信号,同时通过主输出/输入线向从设备发送数据;从设备通过时钟线接收时钟信号,并通过主输入/输出线向主设备发送数据;最后,主设备通过片选线取消对从设备的选择。
SPI通讯协议的传输速率通常由主设备控制,可以根据实际需求进行调整。
在SPI通讯中,数据是以全双工的方式进行传输的,因此可以实现双向数据传输。
此外,SPI通讯协议还支持多主设备和多从设备的连接,可以灵活地构建各种复杂的通讯系统。
SPI通讯协议在实际应用中具有许多优点。
首先,由于SPI通讯协议采用同步传输方式,因此具有高速传输的特点,可以满足对数据传输速率要求较高的应用场景。
其次,SPI通讯协议的硬件接口简单,适合于集成在各种微控制器和外围设备中。
此外,SPI通讯协议还具有良好的灵活性,可以满足不同应用场景下的数据通讯需求。
然而,SPI通讯协议也存在一些局限性。
首先,由于SPI通讯协议采用全双工传输方式,因此在实际应用中需要额外的硬件支持,增加了系统的复杂性。
其次,SPI通讯协议的连接方式较为简单,不支持热插拔,因此在一些动态连接的应用场景中可能无法满足需求。
综上所述,SPI通讯协议是一种简单、高效的串行数据通讯协议,具有高速传输、灵活性和简单硬件接口等特点,适用于许多嵌入式系统中的数据通讯需求。
SPI:高速同步串行口。
3~4线接口,收发独立、可同步进行.SPI,是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。
是Motorola首先在其MC68HCXX系列处理器上定义的。
SPI接口主要应用在 EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。
SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议,比如AT91RM9200.SPI总线系统是一种同步串行外设接口,它可以使MCU与各种外围设备以串行方式进行通信以交换信息。
外围设置FLASHRAM、网络控制器、LCD显示驱动器、A/D转换器和MCU等。
SPI总线系统可直接与各个厂家生产的多种标准外围器件直接接口,该接口一般使用4条线:串行时钟线(SCK)、主机输入/从机输出数据线MISO、主机输出/从机输入数据线MOST和低电平有效的从机选择线SS(有的SPI接口芯片带有中断信号线INT或INT、有的SPI接口芯片没有主机输出/从机输入数据线MOSI)。
SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(单向传输时)。
也是所有基于SPI的设备共有的,它们是SDI(数据输入),SDO(数据输出),SCK(时钟),CS(片选)。
(1)SDO –主设备数据输出,从设备数据输入(2)SDI –主设备数据输入,从设备数据输出(3)SCLK –时钟信号,由主设备产生(4)CS –从设备使能信号,由主设备控制其中CS是控制芯片是否被选中的,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),对此芯片的操作才有效。
这就允许在同一总线上连接多个SPI设备成为可能。
单片机中的SPI通信协议详解SPI(Serial Peripheral Interface)是一种同步串行通信协议,采用主从式结构,用于在嵌入式系统中实现设备之间的通信。
在单片机中,SPI通信协议被广泛应用于与外设的数据交换和设备控制。
1. SPI通信协议概述SPI通信协议由四根信号线组成,包括主设备输出(MOSI)、主设备输入(MISO)、时钟信号(SCLK)和片选信号(SS)。
其中,MOSI用于主设备向从设备传输数据,MISO用于从设备向主设备传输数据,SCLK用于同步主从设备的时钟,SS用于选择从设备。
2. SPI通信协议的传输方式SPI通信协议有两种传输模式,分别是全双工模式和半双工模式。
(1)全双工模式:主设备和从设备可以同时进行数据的发送和接收。
主设备通过MOSI将数据发送至从设备的MISO,同时从设备通过MISO将数据发送至主设备的MOSI。
这种模式下,同步时钟信号由主设备提供。
(2)半双工模式:主设备和从设备在同一时间段内只能进行数据的发送或接收。
主设备通过MOSI将数据发送至从设备的MISO,然后通过MISO将数据发送至主设备的MISO。
然后从设备向主设备发送数据的过程相同。
3. SPI通信协议的时序图SPI通信协议的时序图如下所示:```CPOL = 0 CPOL = 1------------------- -------------------| | | || Idle State | | Idle State || | | |------------------- -------------------| | | || | | |_______| |__________________| |_________Master | Slave | MasterData Send/Rec | Data Rec/Send | Data Send/Rec```其中,CPOL(Clock Polarity)和CPHA(Clock Phase)是SPI通信协议中的两个重要参数。
串行外设接口SPI通信协议详解什么是SPI?SPI的英文全称为Serial Peripheral Interface,顾名思义为串行外设接口。
SPI是一种同步串行通信接口规范,主要应用于嵌入式系统中的短距离通信。
该接口由摩托罗拉在20世纪80年代中期开发,后发展成了行业规范。
SPI通信的4种工作模式SPI通信中有4种不同的操作模式,不同的从机设备可能在出厂时就被设置好了某种模式,并且无法更改。
但是SPI通信必须处于同一种模式下才能进行。
因此我们应该对自己手里的SPI主机设备进行模式的配置,也就是通过CPOL(时钟极性)和CPHA(时钟相位)来控制SPI主设备的通信模式,具体如下:时钟极性(CPOL)定义了SCLK时钟线空闲状态时的电平:1.CPOL=0,即SCLK=0,表示SCLK时钟信号线在空闲状态时的电平为低电平,因此有效状态为高电平。
2.CPOL=1,即SCLK=1,表示SCLK时钟信号线在空闲状态时的电平为高电平,因此有效状态为低电平。
时钟相位(CPHA)定义了数据位相对于时钟线的时序(即相位):1.CPHA=0,即表示输出(out)端在上一个时钟周期的后沿改变数据,而输入(in)端在时钟周期的前沿(或不久之后)捕获数据。
输出端保持数据有效直到当前时钟周期的尾部边缘。
对于第一个时钟周期来说,第一位的数据必须在时钟前沿之前出现在MOSI线上。
也就是一个CPHA=0的周期包括半个时钟空闲和半个时钟置位的周期。
2.CPHA=1,即表示输出(out)端在当前时钟周期的前沿改变数据,而输入(in)端在时钟周期的后沿(或不久之后)捕获数据。
输出端保持数据有效直到下一个时钟周期的前沿。
对于最后一个时钟周期来说,从机设备在片选信号消失之前保持MISO信号线有效。
也就是一个CHPA=1的周期包括半个时钟置位和半个时钟空闲的周期。
Note:此处的前沿和后沿的意思表示在每个周期中第一个出现的边沿和最后一个出现的边沿。
二、通信的SPI 概念2.1、SPI:高速同步串行口SPI:高速同步串行口。
是一种标准的四线同步双向串行总线。
SPI,是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。
是Motorola首先在其MC68HCXX系列处理器上定义的。
SPI接口主要应用在EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。
SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议,比如AT91RM9200.SPI总线系统是一种同步串行外设接口,它可以使MCU与各种外围设备以串行方式进行通信以交换信息。
外围设置FLASHRAM、网络控制器、LCD显示驱动器、A/D转换器和MCU等。
SPI总线系统可直接与各个厂家生产的多种标准外围器件直接接口,该接口一般使用4条线:串行时钟线(SCK)、主机输入/从机输出数据线MISO、主机输出/从机输入数据线MOSI和低电平有效的从机选择线SS(有的SPI接口芯片带有中断信号线INT、有的SPI接口芯片没有主机输出/从机输入数据线MOSI)。
SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(用于单向传输时,也就是半双工方式)。
也是所有基于SPI的设备共有的,它们是SDI(数据输入),SDO(数据输出),SCK(时钟),CS(片选)。
(1)SDO –主设备数据输出,从设备数据输入(2)SDI –主设备数据输入,从设备数据输出(3)SCLK –时钟信号,由主设备产生(4)CS –从设备使能信号,由主设备控制其中CS是控制芯片是否被选中的,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),对此芯片的操作才有效。
这就允许在同一总线上连接多个SPI设备成为可能。
接下来就负责通讯的3根线了。
通讯是通过数据交换完成的,这里先要知道SPI是串行通讯协议,也就是说数据是一位一位的传输的。
这就是SCK时钟线存在的原因,由SCK 提供时钟脉冲,SDI,SDO则基于此脉冲完成数据传输。
数据输出通过SDO线,数据在时钟上升沿或下降沿时改变,在紧接着的下降沿或上升沿被读取。
完成一位数据传输,输入也使用同样原理。
这样,在至少8次时钟信号的改变(上沿和下沿为一次),就可以完成8位数据的传输。
要注意的是,SCK信号线只由主设备控制,从设备不能控制信号线。
同样,在一个基于SPI的设备中,至少有一个主控设备。
这样传输的特点:这样的传输方式有一个优点,与普通的串行通讯不同,普通的串行通讯一次连续传送至少8位数据,而SPI允许数据一位一位的传送,甚至允许暂停,因为SCK时钟线由主控设备控制,当没有时钟跳变时,从设备不采集或传送数据。
也就是说,主设备通过对SCK时钟线的控制可以完成对通讯的控制。
SPI还是一个数据交换协议:因为SPI的数据输入和输出线独立,所以允许同时完成数据的输入和输出。
不同的SPI设备的实现方式不尽相同,主要是数据改变和采集的时间不同,在时钟信号上沿或下沿采集有不同定义,具体请参考相关器件的文档。
在点对点的通信中,SPI接口不需要进行寻址操作,且为全双工通信,显得简单高效。
在多个从设备的系统中,每个从设备需要独立的使能信号,硬件上比I2C系统要稍微复杂一些。
2.2、接口包括以下四种信号:(1)MOSI –主器件数据输出,从器件数据输入(2)MISO –主器件数据输入,从器件数据输出(3)SCLK –时钟信号,由主器件产生(4)/SS –从器件使能信号,由主器件控制在点对点的通信中,SPI接口不需要进行寻址操作,且为全双工通信,显得简单高效。
2.3、接口的硬件连接示意图在多个从器件的系统中,每个从器件需要独立的使能信号,硬件上比I2C系统要稍微复杂一些。
SPI接口在内部硬件实际上是两个简单的移位寄存器,传输的数据为8位,在主器件产生的从器件使能信号和移位脉冲下,按位传输,高位在前,低位在后。
如下图所示,在SCLK的下降沿上数据改变,同时一位数据被存入移位寄存器。
2.4、性能特点AT91RM9200的SPI接口主要由4个引脚构成:SPICLK、MOSI、MISO及/SS,其中SPICLK是整个SPI总线的公用时钟,MOSI、MISO作为主机,从机的输入输出的标志,MOSI是主机的输出,从机的输入,MISO 是主机的输入,从机的输出。
/SS是从机的标志管脚,在互相通信的两个SPI总线的器件,/SS管脚的电平低的是从机,相反/SS管脚的电平高的是主机。
在一个SPI通信系统中,必须有主机。
SPI总线可以配置成单主单从,单主多从,互为主从。
SPI的片选可以扩充选择16个外设,这时PCS输出=NPCS,说NPCS0~3接4-16译码器,这个译码器是需要外接4-16译码器,译码器的输入为NPCS0~3,输出用于16个外设的选择。
SPI接口的一个缺点:没有指定的流控制,没有应答机制确认是否接收到数据。
2.5、SPI协议举例SPI是一个环形总线结构,由ss(cs)、sck、sdi、sdo构成,其时序其实很简单,主要是在sck的控制下,两个双向移位寄存器进行数据交换。
假设下面的8位寄存器装的是待发送的数据10101010,上升沿发送、下降沿接收、高位先发送。
那么第一个上升沿来的时候数据将会是sdo=1;寄存器中的10101010左移一位,后面补入送来的一位未知数x,成了0101010x。
下降沿到来的时候,sdi上的电平将锁存到寄存器中去,那么这时寄存器=0101010sdi,这样在8个时钟脉冲以后,两个寄存器的内容互相交换一次。
这样就完成了一个spi时序。
2.6、举例假设主机和从机初始化就绪:并且主机的sbuff=0xaa,从机的sbuff=0x55,下面将分步对spi的8个时钟周期的数据情况演示一遍:假设上升沿发送数据脉冲主机sbuff 从机sbuff sdi sdo0 10101010 01010101 0 01上0101010x 1010101x 0 11下01010100 10101011 0 12上1010100x 0101011x 1 02下10101001 01010110 1 03上0101001x 1010110x 0 13下01010010 10101101 0 14上1010010x 0101101x 1 04下10100101 01011010 1 05上0100101x 1011010x 0 15下01001010 10110101 0 16上1001010x 0110101x 1 06下10010101 01101010 1 07上0010101x 1101010x 0 17下00101010 11010101 0 18上0101010x 1010101x 1 08下01010101 10101010 1 0这样就完成了两个寄存器8位的交换,上面的上表示上升沿、下表示下降沿,sdi、sdo 相对于主机而言的。
其中ss引脚作为主机的时候,从机可以把它拉底被动选为从机,作为从机的是时候,可以作为片选脚用。
根据以上分析,一个完整的传送周期是16位,即两个字节,因为,首先主机要发送命令过去,然后从机根据主机的命令准备数据,主机在下一个8位时钟周期才把数据读回来。
SPI 总线是Motorola公司推出的三线同步接口,同步串行3线方式进行通信:一条时钟线SCK,一条数据输入线MOSI,一条数据输出线MISO;用于CPU与各种外围器件进行全双工、同步串行通讯。
SPI主要特点有:可以同时发出和接收串行数据;可以当作主机或从机工作;提供频率可编程时钟;发送结束中断标志;写冲突保护;总线竞争保护等。
下图示出SPI总线工作的四种方式,其中使用的最为广泛的是SPI0和SPI3方式(实线表示):SPI总线四种工作方式SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。
如果CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。
时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。
如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。
SPI主模块和与之通信的外设备时钟相位和极性应该一致。
SPI总线包括1根串行同步时钟信号线以及2根数据线。
SPI模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。
如果CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。
时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。
如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。
SPI主模块和与之通信的外设音时钟相位和极性应该一致。
SPI接口时序如图3、图4所示。
2.7、性能补充上文中最后一句话:SPI主模块和与之通信的外设备时钟相位和极性应该一致。
个人理解这句话有2层意思:其一,主设备SPI时钟和极性的配置应该由外设来决定;其二,二者的配置应该保持一致,即主设备的SDO同从设备的SDO配置一致,主设备的SDI同从设备的SDI配置一致。
因为主从设备是在SCLK的控制下,同时发送和接收数据,并通过2个双向移位寄存器来交换数据。
工作原理演示如下图:上升沿主机SDO发送数据1,同时从设备SDO发送数据0;紧接着在SCLK的下降沿的时候从设备的SDI接收到了主机发送过来的数据1,同时主机也接收到了从设备发送过来的数据0.2.8、SPI协议心得SPI接口时钟配置心得:在主设备这边配置SPI接口时钟的时候一定要弄清楚从设备的时钟要求,因为主设备这边的时钟极性和相位都是以从设备为基准的。
因此在时钟极性的配置上一定要搞清楚从设备是在时钟的上升沿还是下降沿接收数据,是在时钟的下降沿还是上升沿输出数据。
但要注意的是,由于主设备的SDO连接从设备的SDI,从设备的SDO连接主设备的SDI,从设备SDI接收的数据是主设备的SDO发送过来的,主设备SDI接收的数据是从设备SDO发送过来的,所以主设备这边SPI时钟极性的配置(即SDO的配置)跟从设备的SDI接收数据的极性是相反的,跟从设备SDO发送数据的极性是相同的。