Carsim学习笔记
- 格式:docx
- 大小:13.35 KB
- 文档页数:1


carsim建模原理CarSim is a software tool for modeling and simulating the dynamics of vehicles. It is widely used in the automotive industry for vehicle development and testing. CarSim uses a multidisciplinary approach to model vehicle behavior, taking into account factors such as vehicle dynamics, tire and road interaction, aerodynamics, and control systems.Carsim是一种用于建模和模拟车辆动力学的软件工具。
它在汽车工业中被广泛用于车辆开发和测试。
CarSim采用多学科方法来模拟车辆行为,考虑了车辆动力学、轮胎和路面相互作用、空气动力学和控制系统等因素。
One of the key principles behind CarSim is the use of mathematical models to represent the physical behavior of vehicles. These models are based on the fundamental principles of physics and engineering, and they are used to simulate the motion of vehicles in a variety of driving conditions.CarSim的一个关键原则是使用数学模型来表示车辆的物理行为。
这些模型基于物理和工程学的基本原理,并且它们用于模拟车辆在各种驾驶条件下的运动。
CarSim仿真快速⼊门(⼀)未经作者授权,禁⽌任何形式的转载!⼀. 介绍1. 1 CarSim软件包含三个主要的部分:VehicleSim (VS): VS Solvers使⽤详细的物理模型来模拟⾼速公路车辆及其控制器的动态⾏为,对驾驶员的控制、3D地⾯⼏何形状及空⽓动⼒学做出相应的相应。
VS Visualizer使⽤虚拟摄像机和绘图显⽰模拟结果。
CarSim图形⽤户界⾯(GUI)可以访问车辆,道路,测试条件以及⽀持视频动画和绘图的信息的数据库。
1.2 将会学到什么?车辆动⼒学的⾼精度的仿真模拟需要⼤量数据。
CarSim包括⼀个包含许多⽰例车辆和测试流程的数据库。
如果⽤户还不熟悉CarSim,特别是⼀开始对GUI和数据库不熟悉。
本⽂旨在介绍GUI和数据库的主要元素,以便⽤户熟悉CarSim的组织加⼯和基本⼯具。
期望利⽤⼏个⼩时来完成所有步骤。
本⽂旨在介绍使⽤CarSim的使⽤经验。
因此,将向⽤户展⽰如何创建新数据库,以及如何在不与现有数据集冲突的情况下创建新数据集。
在本教程中,不必掌握CarSim中的所有选项和功能,CarSim包含软件中包含的⼤量⽂档,本⽂在以后的章节中会对这些⽂档进⾏讲解。
⼆. 查看仿真结果如何在CarSim中查看仿真结果,我们将从查看现有⽰例开始。
稍后,将运⾏⼀个新的仿真。
在准备过程中,将⾸先创建⼀个新数据库,以便在学习本教程时使⽤。
这样避免了对其他已安装⽰例进⾏意外修改的可能性。
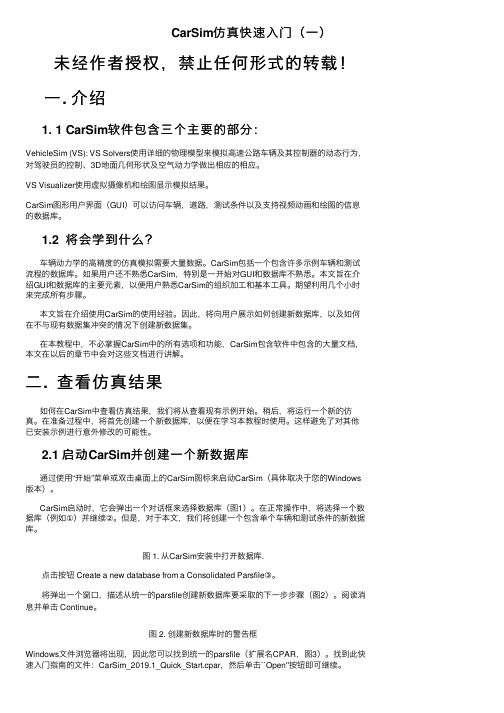
2.1 启动CarSim并创建⼀个新数据库通过使⽤“开始”菜单或双击桌⾯上的CarSim图标来启动CarSim(具体取决于您的Windows 版本)。
CarSim启动时,它会弹出⼀个对话框来选择数据库(图1)。
在正常操作中,将选择⼀个数据库(例如①)并继续②。
但是,对于本⽂,我们将创建⼀个包含单个车辆和测试条件的新数据库。
图 1. 从CarSim安装中打开数据库.点击按钮 Create a new database from a Consolidated Parsfile③。



carsim 变量
(最新版)
目录
1.Carsim 变量的概述
2.Carsim 变量的应用领域
3.Carsim 变量的优势和局限性
正文
Carsim 变量是一种在计算机科学和工程领域中广泛应用的变量类型。
Carsim 是一个用于模拟汽车行为的软件工具,能够模拟汽车的各种属性,例如质量、速度、加速度、制动力等等。
Carsim 变量通常用于汽车工程、自动驾驶技术、汽车控制系统等领域。
Carsim 变量的优势在于它能够提供高精度的汽车模拟。
Carsim 的模拟引擎使用了先进的数学模型和算法,能够模拟出各种复杂的汽车行为,包括汽车的转向、制动、加速等等。
这使得 Carsim 变量在汽车工程和自动驾驶技术等领域中非常有用。
然而,Carsim 变量也存在一些局限性。
首先,Carsim 变量只能模拟汽车行为,无法模拟其他物体的行为。
其次,Carsim 变量的使用需要一
定的计算机技能和数学知识,对于初学者来说可能会有一定的难度。
Carsim 变量是一种非常有用的变量类型,能够提供高精度的汽车模拟,广泛应用于汽车工程和自动驾驶技术等领域。
第1页共1页。
Vehicle ScreensOverview of Vehicle Screens (1)The Vehicle Assembly Screen (2)The Vehicle Trailer Screens (5)The Vehicle: Loaded Condition Screen (6)Sprung Mass Parameter Definitions (8)Suspension Kinematics, Zero Jounce, and Wheel Center Heights (8)Coordinate System (9)Aerodynamics (9)Frame Twist (9)The Vehicle: Sprung Mass screen (11)The Vehicle: Sprung Mass (from Whole Vehicle) Screen (14)The Vehicle: Trailer Sprung Mass Screen (17)Overview of Vehicle ScreensWhen specifying a vehicle from the Run Control screen, you typically link to a dataset from one of two vehicle screens:1.Vehicle: Assembly — assemble the vehicle from datasets that define the major systemsand components. The vehicle as defined by this screen is considered to be in the design load condition (sometimes called curb condition).2.Vehicle: Loaded Condition — combine a motor vehicle (from the Vehicle: Assemblylibrary) with additional masses, virtual sensors and trailers. Changes in loading conditions or sensor locations can be made by changing a few links, without making any changes in the basic vehicle description.The two main vehicles screens make use of these supporting screens for trailers and sprung mass properties that are also described in this document.3.Trailers — use two screens similar to the Vehicle: Assembly screen to assemble trailerswith one and two axles.4.Vehicle: Sprung Mass — set size and weight information about the sprung mass of themain vehicle.5.Vehicle: Sprung Mass (from Whole Vehicle) — an alternative screen to set size andweight information using measurement made from the whole vehicle.6.Vehicle: Trailer Sprung Mass — set size and weight information about the sprung massof a trailer.The Vehicle Assembly ScreenFigure 1 shows the Vehicle: Assembly screen on which the components and systems of a car or other four-wheeled motor vehicle are assembled.123456 789108111213148111213141414 Figure 1: Vehicle: Assemblyscreen.Link to a Vehicle: Sprung Mass or Vehicle: Sprung Mass (from Whole Vehicle) datasetthat defines the properties of the sprung mass.Link to an Aerodynamics: Main Screendataset.Link to an animator dataset. This is usually a dataset from the library Animator: Vehicles and Sensor Targets, but can be any dataset that defines the shape of the sprung mass for thewhen the link is made.Drop-down list for specifying the type of powertrain. The option chosen determines the kind of control that appears directly underneath.1. If the powertrain is Speed control (min. powertrain), two data fields are shown (Figure2).Figure 2. Data field with simple speed control and no powertrain details.The first is the ratio of drive torque (from the speed controller) that goes to the rear wheels (keyword = R_REAR_DRIVE_SC). Use 0 for simple front-wheel drive, 1 for simple rear-wheel drive, and 0.5 for simple four-wheel drive.The second data field is the power limit used by the speed controller (keyword = PMAX_SC). The speed controller uses proportional-integral control to try to match a target speed. The power being transferred to the wheels is monitored and not allowed to exceed this limit.2. If the powertrain is Front-wheel drive, a link is shown to a Powertrain: Front-WheelDrive dataset.3. If the powertrain is Rear-wheel drive, a link is shown to a Powertrain: Rear-WheelDrive dataset.4. If the powertrain is 4-wheel drive, a link is shown to a Powertrain: 4-Wheel Drivedataset.5Link to a Brakes: Four-Wheel System dataset.6Link to a Steering System dataset.7Miscellaneous field. This is a location for specifying parameters for extensions to the model or information for the animator.8Miscellaneous links. These have no predefined purpose, but can be linked to datasets that specify parameters for extensions to the model or information for the animator. The data from the link in the left column applies to the sprung mass or whole vehicle. Data from the other two links apply to the front or rear suspension, as indicated by their locations on the screen.93x1 image scale checkbox. If the image of the vehicle looks distorted, try checking or unchecking this box to improve the appearance.Note When working with datasets from older versions of the software (before 2009), images associated with datasets might have been included that arescaled for a 3x1 aspect ratio (the image is three times wider than it ishigh). Images that are created automatically from within the VS browserhave a 2x1 aspect ratio.10Image of vehicle. When you change the link to the animator dataset 3, the associate image from that dataset is shown here. You can also specify an alternate image by clicking on the image to display a drop-down list of options. See the VS Browser Reference Manual for details about these options.11Drop-down list for selecting a type of suspension data. There are four choices for the front suspension, and five for the rear (shown below).The first two specify an independent suspension described either with a single screen (simple) or a set of two screens (full nonlinear). If the Independent (simple) choice is selected, then the link underneath is used to connect Suspension: Independent System13Independent (fully nonlinear) Suspension: Independent System Kinematics and the link for Suspension: Independent Compliance, Springs, and Dampers13is available. The next two choices are two options nonlinear). A twist beam suspension can be specified for the rear.1211simplified overall suspension dataset.1311 list is set for a simplified suspension screen, then this link is hidden.14Links to Tire datasets for the four tires.The Vehicle Trailer ScreensThere are two screens, Vehicle: Trailer with 1 Axle screen and Vehicle: Trailer with 2 Axles screen, to assemble the major systems and components of a one-axle and two-axle trailer, respectively. The trailers as defined by those screens are considered to be in the unladen condition (often called curb condition). Additional masses and inertias can be added or subtracted on the Vehicle: Loaded Condition screen using payloads.Figure 3 shows the Vehicle: Trailer with 2 Axle screen. The Vehicle: Trailer with 1 Axle screen is very similar to the other, except that the properties for the second axle and tandem suspension parameters do not exist.1234578910811121314141112131414151617 Figure 3: Vehicle: Trailer with 2 Axles screen.The settings for the two trailer screens are nearly identical to those of the Vehicle: Assembly screen described in the previous section. The main differences are:1. There are only two options for suspension types, so a checkbox is usedtrailerscreens rather than the drop-down list used for the Vehicle: Assembly2.Vehicle: Assembly screen has powertrain data; the trailer screens have hitch data3. The Vehicle: Trailer with 2 Axles screen has some parameters for a tandem suspension. The user controls that are specific to the trailer screens are described below; for all others, please see the descriptions in the previous section.Link to a Vehicle: Trailer Sprung Mass dataset.Link to a Hitch dataset. This defines stiffness properties and moment preloads of the hitch.Link to a brake system dataset appropriate for the number of wheels on the trailer (Brakes: Two-Wheel System for one-axle trailers, or the same choices for brake systems on two-axle trailers that are available for the four-wheeled motor vehicle).Checkboxes for using simple suspension data. If checked, the link underneath is set to workSuspension: Solid Axle System, and the link forseparate compliance dataRatio of the spring loaded shared b the other axle of the tandem suspension keyword =Coefficient to determine tandem suspension load transfer due to wheel spin torque (keyword = CFZ_MY_TAND). This is the load transferred to the lead axle of the tandem, divided by the total spin torque of all four wheels of the tandem. A positive sign implies that the front axle load decreases during braking (brake torque is a negative moment). This field does not exist on the Vehicle: Trailer with 1 Axle screen.Fraction of tandem static load carried by the springs of the rear axle of the tandem in the nominal load condition (keyword = R_TAND_TRAIL_STATIC). Typically this is 0.5. This field does not exist on the Vehicle: Trailer with 1 Axle screen.The Vehicle: Loaded Condition ScreenFigure 4 shows the Vehicle: Loaded Condition screen to add loads, sensors, and miscellaneous model extensions to a vehicle. You can also add a one- or two-axle trailer that is hitched to the motor vehicle.If a trailer is used, it can also carry up to four loads, and can be equipped with the same kinds of sensors as the towing vehicle (Figure 5).of vehicle that were described in the previous sections.123491022233Figure 4: Vehicle: Loaded Conditionscreen when there is no trailer.Link to a Vehicle: Assembly dataset. The vehicle type shown here (in the figure it isInd_SA ) is used to determine which of several VS solver programs should be used to make the simulation run. When thedataset hasan associated image, that image will beLinks to either or Payload: Custom datasets. These links also appearLinks to miscellaneousdatasets that add various kinds of sensor, model extensions, or other data that is intended to be grouped with the vehicle description.Trailer checkbox. When checked (Figure 5), additional links appear to specifying the trailerSeparate trailer image checkbox. When this box is checked, the image for the lead vehicle is reduced in size and a second image is shown for the linked trailer dataset. In this case, the 3x1 image style checkbox is not shown.If the Separate trailer image checkbox is not checked, then a single image is used and the 3x1 image style checkbox remains visible. Link to either a Vehicle: Trailer with 1 Axle or Vehicle: Trailer with 2 Axles dataset.1 234102 2 23 310562222333Figure 5: Vehicle: Loaded Condition screen when there is a trailer.Sprung Mass Parameter DefinitionsThree screens are used for specifying the main size and weight properties of a motor vehicle or towed trailer. In all cases, the properties of the vehicle are defined for the unladen configuration, which is sometime called the design condition or the curb condition.The data on these screen serve three main purposes:1. They define some of the main mass and inertia properties of the vehicle.2. The properties on these screens affect the interpretation of data from other screens thatdepend on load.3. The sprung mass coordinate system is used to defines the locations of other points in thevehicle model.Suspension Kinematics, Zero Jounce, and Wheel Center Heights Suspension motions are tied to vertical movement called jounce that provides the reference for many forms of nonlinear suspension kinematical data. These include lateral movement,longitudinal movement, camber angle, and toe angle.In particular, the definition of zero jounce is critical for properly using this data.The CarSim and VehSim math models support two definitions of jounce in the design load condition. One is based on the loads carried by the front and rear suspensions, so when a change is made to this screen, the definition of jounce is affected.Figure 8 shows the location of the wheel centers when the front and rear springs are in equilibrium supporting the sprung mass in a level condition, where roll and pitch angles are by definition zero. The heights of the wheel centers in a specific run will depend on the road or ground geometry, the tire sizes and properties, and the presence of additional loads. However, this screen contains all of the information needed to define the concepts of zero pitch and roll and suspension jounce.Coordinate SystemLoads, sensors, and various reference points are specified using X, Y, and Z coordinates in a coordinate system fixed in the sprung mass. The axis directions and the location of the origin of the coordinate system are defined specifically for the vehicle in the position shown on this screen. AerodynamicsThree forces and three moments define the aerodynamic effects on the sprung mass. The forces act on a point on the sprung mass called the aerodynamic reference point, defined by X, Y, and Z coordinates in the sprung mass coordinate system (see Aerodynamics). If changes are made to the wheelbase, the location of the aerodynamic reference point might need modification. Frame TwistSome vehicles have low chassis torsional stiffness as compared to suspension roll stiffness. Chassis twist influences relative roll at each axle and the distribution of load transfer between axles. The chassis twists in response to suspension forces, powertrain torque, and the roll moment at a trailer hitch if one exists.Six parameters are used in the description of chassis twist: the measured stiffness and damping about a longitudinal axis, the longitudinal position of a node point which describes the distribution of torsional stiffness along the length of the frame, two dimensions for the locations of points at which measurements were made, and a coordinate for the location at which the powertrain torque is reacted at the chassis. For independent drive axles the powertrain torque has no effect.The points used to measure chassis stiffness must be laterally equidistant front and rear, and longitudinally equidistant left and right to describe a rectangle as shown in Figure 6. If it is not possible to attach equipment to the chassis in this configuration, fixtures may be attached to provide the proper spacing. The reported stiffness in the dataset should be based on the angles of deflection and moments as applied at these points. A damping value is required for numerical stability, but its actual value has little effect on most handling maneuvers.The X coordinate of the node point can be detected by the vertical loads measured at four measurement points for the tilted chassis. For example, when the chassis is tilted to the left (it causes the load transfer from right to left) as shown in Figure 7, the load transfer measured on the two front measurement points is ∆F f, and the load transfer measured on the two rear measurement points is ∆F r. The X coordinate of the node is:X node = L • ∆F r / (∆F f + ∆F r)Where L is the distance between the front and rear measurement points.Figure 6. Rectangular geometry associated with frame twist.The effective mounting location of the engine can similarly be determined by locking the drive shaft to the transmission (as putting an automatic transmission in “park”) and applying a moment. Then, you can measure the load transfer and apply the above equation.lfFigure 7. Front and rear load transfer due to frame twist.The Vehicle: Sprung Mass screenFigure 8 shows the Vehicle: Sprung Mass screen with the controls described below.Animator reference height (keyword = Z_LENGTH). The animator resizes the shapeAnimator reference width (keyword = Y_LENGTH). The animator resizes the shape information to match vehicle dimensions. This dimension is used to stretch or shrink the width of the shape used for the vehicle sprung mass.Figure 8: Vehicle: Sprung Mass screen.Heights of the wheel spin axes above the sprung mass origin at the design load condition with zero pitch and roll (database keywords = *HWC_LF, *HWC_RF, *HWC_LR, *HWC_RR;solver keyword = H_WC([IUNIT,] IAXLE, ISIDE)). These define the relationship between the locations of the wheels relative to the sprung mass and the jounce used to define nonlinear suspension kinematical effects. They also determine how the sprung mass is located relative to the wheels in the animator. Values specified on this screen override those that appear on the suspension screens, where they appear for backward compatibility withdatasets from earlier versions of the software. If wheel center heights are not specified here, values from the suspension screen are used.Distance from the front axle to the (unladen) mass center (Keyword = LX_CG_SU[(IUNIT)]). This parameter and the wheelbase determine how much of the mass is supported by the front and rear suspensions in the design condition.Lateral coordinate of mass center (keyword = Y_CG_SU[(IUNIT)]). Although normallyzero, this can be given a non-zero value if the vehicle is not laterally symmetric. A positive value means the mass center is located on the left side of the vehicle.Height of (unladen) mass center above the origin (keyword = H_CG_SU[(IUNIT)]).Lateral coordinate of hitch center (keyword = Y_H).Normally zero, this can be given a non-zero value to study asymmetric vehicles. A positive value means the hitch point is located on the left side of the vehicle. This parameter is used only if a trailer is hooked to the vehicle in the simulated run.Hitch height above the sprung mass origin (keyword = H_H). This parameter is used only if a trailer is hooked to the vehicle in the simulated run.Wheelbase, defined as the distance between the centers of the front and rear wheels whenthe vehicle is in the design load condition (keyword = LX_AXLE ([IUNIT,] IAXLE)]).This value is also passed to the animator (keyword = X_LENGTH) to size the sprung mass shape longitudinally.Distance from the front axle to the hitch (keyword = LX_H).The point of interest is thehitch pitch pivot. This parameter is used only if a trailer is hooked to the vehicle in the simulated run.Sprung mass (keyword = M_SU [(IUNIT)]). This is the mass of the vehicle in the design load configuration excluding the unsprung masses associated with the wheels, axles, and moving suspension parts.Moments and products of inertia of the unladen sprung mass. The moments and product are all taken about the mass center of the sprung mass and are based on a vehicle axis system in which the X axis (longitudinal) and Y axis (lateral) are parallel with the ground when the vehicle is at rest on a flat level surface, and the Z axis (vertical) points up in parallel with the gravity vector.The moments of inertia in roll (IXX_SU[(IUNIT)]), pitch (IYY_SU[(IUNIT)]), and yaw (IZZ_SU[(IUNIT)])The product of inertias, also about the mass center of the sprung mass, are defined as the negative of the volume integral. For example, the definition for the XZ product is:I xz = –∫V r x z dvThe product is positive when the principal X axis of the sprung mass tilts down (looking forward). This value must be entered directly—there are no built-in tools to calculate it.Edit Radii of Gyrationwith X, Y, and Z radii of gyration as an alternative to entering moments of inertia. them are updated to reflect changes to the radii of gyration or mass. When it is unchecked, the moment of inertia fields are enabled for editing and the radii of gyration fields are locked, displaying values calculated from the mass and inertias.Radii of gyration (not parameters). Sometimes measured values for Ixx, Iyy, and Izz arenot available but Rx, Ry, and Rz can be estimated. When the Edit Radii of Gyration checkbox is checked, the corresponding moments of inertia are calculated with the equation:I = M•R2Use any of these three radii if the corresponding moment of inertia is not available but the corresponding radius can be estimated. If used:1. a guess for R x might be a third of the vehicle width,2. a guess for R y might be half the wheelbase, and3. a guess for R z might be half the wheelbase.Checkbox to reveal the list of frame twist parameters. To use frame twist, check this box and include your parameters. The flexibility parameters are shown in Figure 9.151617181920Figure 9: Frame torsional flexibility parameters.Distances between points on the chassis where the stiffness is measured (keywords = L_FRAME[(IUNIT)], W_FRAME[(IUNIT)]).Distance that the torsional node point lies behind the origin of the coordinate system, in mm.(keyword = X_NODE[(IUNIT)])Distance that the effective engine mounting point lies behind the origin of the coordinate system, in mm (keyword = X_ENG). This point should reflect the location at which a longitudinally-oriented engine reacts drive torque on the sprung mass.Torsional stiffness of the chassis about the longitudinal axis, in N-m/deg.Torsional damping of the chassis about the longitudinal axis, in N-m/deg/sec.The Vehicle: Sprung Mass (from Whole Vehicle) Screen Figure 10 shows the Vehicle: Sprung Mass (From Whole Vehicle) screen to define the size and weight properties of the motor vehicle sprung mass, based on measured properties of the whole vehicle. This screen provides an alternative to the Vehicle: Sprung Mass screen for defining themain size and weight properties of a vehicle in the unladen condition.Animator reference height (keyword = Z_LENGTH). The animator resizes the shape information to match vehicle dimensions. This dimension is used to stretch or shrink thevertical scale of the shape used for the vehicle sprung mass.12345678910311121314151617Figure 10: Vehicle: Sprung Mass (From Whole Vehicle) screen.Animator reference width (keyword = Y_LENGTH). The animator resizes the shape information to match vehicle dimensions. This dimension is used to stretch or shrink the horizontal scale of the shape used for the vehicle sprung mass.Height of the front wheel spin axes above the sprung mass origin at the design loadcondition with zero pitch and roll (database keywords = *HWC_LF, *HWC_RF, *HWC_LR, *HWC_RR; solver keyword = H_WC([IUNIT,] IAXLE, ISIDE)). This defines the relationship between the location of the wheel relative to the sprung mass and the jounce used to define toe and camber effects. It also determines how the sprung mass is located relative to the wheels in the animator. Values specified on this screen override those that appear on the suspension screens, where they appear for backward compatibility with datasets from earlier versions of the software. If wheel center heights are not specified here, values from the suspension screen are used.Wheelbase, defined as the distance between the centers of the front and rear wheels (keyword = LX_AXLE([IUNIT,] IAXLE)). This value is also passed to the animator (keyword = X_LENGTH) to size the sprung mass shape longitudinally.Distance from the front axle to the optional hitch (keyword = LX_H). The point of interest is the hitch pitch pivot. This parameter is used only if a trailer is hooked to the vehicle in the simulated run.Lateral coordinate of hitch center (keyword = Y_H). Normally zero, this can be given a non-zero value to study asymmetric vehicles. A positive value means the hitch point is located on the left side of the vehicle. This parameter is used only if a trailer is hooked to the vehicle in the simulated run.Hitch height above the sprung mass origin (keyword = H_H). This parameter is used only ifa trailer is hooked to the vehicle in the simulated run.Measured weight under each tire (database keywords = *W_LF, *W_RF, *W_LR, *W_RR). These are used to calculate the lateral and longitudinal positions of the mass center of the total vehicle as measured, and its total mass.Unsprung mass of the front and rear suspensions on the measured vehicle (databasekeywords = *M_US(1), *M_US(2)). These masses are removed from the total vehicle to obtain the sprung mass, and to calculate the location of the mass center of the sprung mass and its inertia properties. Unsprung mass values entered here are not used by the solver program. The solver obtains unsprung mass information from the suspension screens, to facilitate definition of a vehicle with suspensions different from those installed on the measured vehicle.Spin inertias of the front and rear suspensions on the measured vehicle (database keywords = *IW(1), *IW(2)). These inertias are removed from the total vehicle to obtain the sprung mass pitch inertia. Inertia values entered here are not used by the solver program. The solver obtains unsprung mass inertia information from the suspension screens, to facilitate definition of a vehicle with suspensions different from those installed on the measured vehicle.Track width of the front and rear suspensions on the measured vehicle (database keywords = *L_TRACK(1), *L_TRACK(2)). These dimensions are used to calculate the location of the mass center of the sprung mass and its inertia properties. Dimensions entered here are not used by the solver program. The solver obtains track information from the suspensionscreens, to facilitate definition of a vehicle with suspensions different from those installed on the measured vehicle.Distance the mass centers of the complete vehicle as measured and of the sprung mass lie behind the front axle. These are not entered by the user, but are calculated from other information on the screen. Their values are updated automatically when values involved in the calculations are changed. The value for the sprung mass is passed to the solver program (LX_CG_SU[(IUNIT)]). The value for the measured vehicle is provided for reference.Lateral coordinates of the mass centers of the complete vehicle as measured and of the sprung mass. A positive value means the point is located on the left side of the vehicle. These are not entered by the user, but are calculated from other information on the screen. Their values are updated automatically when values involved in the calculations are changed. The value for the sprung mass is passed to the solver program (keyword = Y_CG_SU[(IUNIT)]). The value for the measured vehicle is provided for reference.Height of the mass centers of the complete vehicle as measured and of the sprung mass above the vehicle origin. The dimension for the complete vehicle as measured (database keyword = *H_CG_TU) is used to calculate other values on this screen. The dimension for the sprung mass represents the vehicle in its design position and is passed to the solver program (keyword = H_CG_SU [(IUNIT)]).Selecting the checkbox reveals a field for the yaw and roll inertia of the unsprung mass of aaxle plus wheels and tire (the entire unsprung mass) about the mass center along the roll axis. The same number is also used internally for the yaw moment of inertia. These inertias are removed from the total vehicle to obtain the sprung mass inertia properties. Inertia values entered here are not used by the solver program. The solver obtains unsprung mass inertia information from the suspension screens, to facilitate definition of a vehicle with suspensions different from those installed on the measured vehicle.1518Total calculated mass of the measured vehicle and its sprung mass. The sprung mass is themass of the vehicle in the design load configuration minus the unsprung masses associated with the wheels, axles, and moving suspension parts. The sprung mass is passed to the solver (keyword = M_SU[(IUNIT)]). The mass of the total vehicle is provided for reference.Moments and products of inertia of the total vehicle as measured, and calculated values for the sprung mass. The moments and product are all taken about the respective mass centers of the measured vehicle or the sprung mass and are based on a vehicle axis system in which the X axis (longitudinal) and Y axis (lateral) are parallel with the ground when the vehicle is at rest on a flat level surface, and the Z axis (vertical) points up in parallel with the gravity vector.。
Carsim软件●图形化数据库该图形库包括图形用户界面(SGUI)和图形数据管理系统,是CarSim的主要界面,包括整车模型数据库、控制输入(速度、转向、制动、油门、驾驶员模型、路面信息)数据库、仿真设置(仿真起始时间、距离和仿真频率)数据库。
共有150多组数据库连在一起构成CarSim总的数据库,每一个数据库都是通过不同的界面显示,使得软件易于操作使用。
●车辆数学模型及求解器密歇根大学交通运输研究所(UMTRI)的MichaelSayers博士为汽车及其它多体系统开发了世界上最先进的自动代码生成器。
UMTRI用这种自动代码生成器一AutoSim一构建车辆动力学方程,能很快地创建新模型或扩展现有模型,满足实时及优化的需求:同时能通过更新AutoSim产生新的代码,以迅速满足新的接口及操作系统的需求。
由AutoSim生成的零误差代码支持高精度的数学模型并具有高效的并行运算效率,可大大减少出错的几率,加强软件运算的可靠性,并提高软件的计算速度。
VehicleSim求解器可以迅速求解AutoSim产生的车辆模型运动方程式、计算输出变量、进行频谱分析(spectrumanalyzer),同时求解器内嵌Simulink接口,结合精确数学车辆模型可实现快速的联合仿真。
●仿真动画显示器(SurfaceAnimator)通过动画模拟可显示每一时刻车辆的运行状态、车轮受力和车辆在不同环境(输入)下的动态响应。
新的动画软件SurfaceAnimator运用OpenGL技术,可表现出阴影路面,提供更快、更逼真的动画模拟效果,且易于输出到其它演示文档。
●绘图器(WindowsEngineeringPlotter)可以选择输出某些特性参数随时间或另一特性参数变化的曲线,能产生超过500组变量的仿真曲线,也可生成来自不同车辆模型数据库的仿真对比曲线,或将数据结果输出至其它的软件,如MATLAB、Excel。
与许多面向结构建模的动力学软件如MSC.ADAMS、Altair.MotionView不同,CarSim具有面向参数建模的特点。
1、The LTARG Configurable Function
BikeSim,CarSim和TruckSim包含一个可配置函数LTARG,该函数根据位置S 计算横向偏移量L.此函数最初用于定义闭环路径跟随器模型的目标路径,以便轻松定义车道变化以及其他基于参考路径的目标。
LTARG功能还用于控制移动物体的运动,而且相对于参考路径来表示交通车辆,车道标记以及其他特征。
该函数的形式为LTARG(0,S,ID),其中S是位置,ID是1到100之间的数据集编号。
当为函数指定信息(常量,S-L值表等)时,将系统索引参数ILTARG设置为相关的数据集编号(ID)。
参数N_LTARG是将在记录文件中显示的LTARG数据集的数量。
默认值是1; 它可以设置为任何正数,最多为100.(此参数在“驱动程序模型:转向控制器”部分的记录文件中列出,如后面的图3所示。
)
2、Using VS Reference Paths
VS参考路径对道路描述是必不可少的,如下一节所述。
它们也用于驱动程序模型,并用于控制可能添加到模型中的移动对象。
为了支持涉及多个路径的模拟场景,每个路径都包含一个带有用户定义的ID 号码的参数PATH_ID。
用于道路,驾驶员模型或使用此ID号码指定的移动物体的路径。
默认情况下,ID被设置为创建的路径的编号; 第一个路径有PATH_ID(1)= 1; 第二个有PATH_ID(2)= 2; 然而,构建具有多个路径和/或道路的模型的高级用户可以分配多个其他数字用于涉及不同路径集合的模拟。
例如,如果PATH_ID(3)= 123,则无论路径何时相对于其他路径被定义,ID号123都被用于仿真。
(这可能不是在不同模拟中的第三条路径。
)
每个VS模拟将包括至少一个参考路径。
如果数学模型的输入不包含任何路径,那么在初始化过程中将自动添加默认路径,该路径是一个以零标题为导向的直线,以便S =全局X和L =全局Y.。