CATIA DMU分析双横臂悬架模型
- 格式:wps
- 大小:1.87 MB
- 文档页数:10

随着产品更新换代速度的加快,现有样机的制造周期和制造成本已难以适应产品开发的需求,使用计算机三维设计技术建立数字样机,可实现实物样机的作用,有效缩短周期、降低成本。
数字样车技术(DMU)指在计算机或工作站中利用CATIA V5软件所具有的装配、干涉检查、功能部件校核、焊接及拆装、人机工程学检查以及4维空间漫游等功能对实车进行虚拟的模仿和再现,使其具有物理模型的特性,从而取代物理模型验证产品的设计、功能(运动)、工艺、制造和维护等方面内容的产品开发技术,形成一辆模拟现实的数字样车,对产品的真实化进行计算机模拟。
图1 静态干涉检查的流程DMU的作用DMU的作用首先是提供各类、各种档次的可视化功能,用不同方式对电子样车的全部部位进行审视、评估,漫游和模拟真实的视觉效果。
尽可能在数字化环境中看到产品在真实世界中相同的效果,实现低成本、高效率的产品可视化模拟。
CATIA V5实现了可视化和产品结构的统一进行,让复杂区域的可视化变得非常容易,使可视化的应用范围得到扩展。
其次是提供各类对车型或部件间进行功能性分析的手段,包括:机构运动,干涉分析,拆装分析,空间分析和管理等。
尽可能在数字化环境中进行与真实世界中相同的分析,使设计师在设计早期就发现问题所在,在设计的各个阶段,及时、大量地进行各种分析,提高产品设计质量。
图2 断面分析界面三是应用关联设计,运用CATIA独有的PUBLICATION技术,按照自顶向下的设计方式,实现装配之间、零部件之间、一个模型文件中的多个几何实体之间、曲面模型和实体模型之间、特征之间等多种层次的端到端的各类关联。
基于骨架的DMU设计分析方式,实现数字样机的快速更改,降低成本,快速地进行多方案的评估与研讨,通过建立关联性的设计模板进行管理和重用,提高设计效率。
以下通过整车实例中的部分案例来说明DMU的实际应用。
DMU静态干涉检查静态干涉检查是DMU中也是整车设计中最重要的部分,干涉检查根据项目周期可以分为设计过程中干涉检查、后期进行验证干涉检查,以及后期发生设计变更后的干涉检查。

万方数据・设计・计算.研究.悬架,其不同于传统结构之处在于下控制臂为双铰点结构,从而保证主销偏置距为负值,提高了制动时的回正性。
该结构的连杆布置使车轮中心到主销轴线偏置距变小.减小了绕主销轴线的惯性力矩。
能够实现精确的车轮定位.确保操纵稳定性和乘坐舒适性。
图1为前悬架右半部分示意图。
其中B4。
与B4:构成上控制臂,日3f4,与口4。
构成下控制臂,B4,为转向横拉杆,曰4。
为减振器,B4,为弹簧,C点为车轮中心点。
约束关系如下:转向节与上下控制臂及转向横拉杆分别在曰。
、毋、玩与日,点为球铰连接:车轮与转向节在C点为旋转副;上控制臂与副车架在A4:方向上为旋转副;减振器上端与下端鼠、A。
以及下控制臂与副车架连接处A,、A。
为万向节副;减振器上、下之间为圆柱副;横向稳定杆与转向齿条为移动副。
图1前悬架右半邵分不惹在ADAMS/CAR中建立模型有2种方法,一是直接在ADAMS/CAR中建模.利用软件提供的基本体进行组合.形成所需的模型;二是先在其它一些专业CAD软件(如UG、CATIA)中建立实体模型,再通过两个软件的接口将模型导入ADAMS/CAR中进行仿真。
比较2种方法,后者较前者建立的模型更加准确,更接近实际情况。
本文采用的是第2种方法,将CATIA中的前悬架模型导入ADAMS/CAR,具体如图2所示。
图2前悬架模型由图2可知.前悬架主要由减振器、弹簧、上控制臂、下控制臂、转向节和转向横拉杆组成。
按照前述的约束关系添加约束.并在副车架与车身之间添加橡胶衬套,使之组成完整的系统,具体如图3所示。
2009年第8期图3建立约束的前悬架模型整个前悬架系统的自由度Ⅳ为:N=6n—-EK=6x21—-124--2式中,/7,为有相对运动的部件总数;∑K为系统刚性约束之和。
这2个自由度分别是悬架左、右两侧摆臂的上、下摆动,即减振器的上、下跳动。
在进行仿真时引入转向系统和传动系统,在ADAMS/CAR中的仿真模型如图4所示。

摘要:本文主要介绍了在CA TIA 软件环境中,汽车底盘系统开发的设计流程以及电子样机DMU(Digital Mockup)与关联设计集成的应用方法。
关键词:设计流程集成设计DMU引言为了缩短产品的设计及生产周期,提高产品的市场竞争力,取得好的经济效益,国内许多的汽车公司在产品的设计上都使用了多种的三维软件系统。
但多种系统并存会带来设计管理与数据交流方面的诸多问题,那么,哪一个系统是最适合汽车设计?如何评估和确定?如何更深入的进行设计水平提升的探索?东风汽车股份公司通过项目实施的方式在这方面做了很多的探索。
东风汽车股份有限公司商品研发院最早于1998 年在车身设计开发上引用CAITA,2005 年开始应用在PICK-UP 及SUV 整车的设计开发上。
特别是在整车底盘的设计开发中,将很多成熟的设计经验与CATIA 软件使用结合到一起,总结出在CATIA 软件中,汽车底盘系统开发的设计流程以及电子样机DMU(Digital Mockup)与关联设计集成的应用方法。
这些方法的使用,提高了设计水平与质量,明显的缩短了变形产品的设计开发周期。
充分的显示出CATIA 在高级应用方面的优势之处。
1 汽车底盘开发设计流程使用CA TIA 软件进行汽车底盘设计开发的核心是基于骨架模型与DMU 集成的TOP-DOWN 设计方法。
自上而下(Top Down Design process)设计是与常规Bottom Up 设计相对应的一种设计方式,此设计方法的中心思路是先整体规划,后细节设计。
即在产品整体设计的初期,就定位于整个装配系统的最高层面来考虑产品的总体设计和功能性设计。
这种方法是从装配构成的最顶层开始,在一个骨架模型零件中来考虑和表达整个装配的各个部件的相互位置关系、作用和实现的功能等,集中捕捉产品的设计意图,自上而下的传递设计信息,从而更加有目的地进行后续的设计。
骨架模型就是产品设计信息的载体,这个骨架模型的建立需要考虑到不同零件之间的参数关系与驱动关系,这些信息会用来作为后期详细模型设计的基础。
摘要悬架系统是汽车最重要的零部件之一,悬架的运动学特性直接影响到汽车操作稳定性和使用性能,悬架运动学的研究是汽车研究开发中最重要课题之一。
本文介绍了汽车悬架系统运动学的研究现状,并对独立悬架系统做了详细的分类和对比分析,选取麦弗逊悬架系统最为本文的研究对象,详细分析了麦弗逊悬架系统的结构组成、布置形式及运动特性,并利用CATIA软件建立了麦弗逊悬架的三维模型,并通过装配设计,完成了麦弗逊悬架系统模型的装配。
最后,通过机械系统动态仿真软件ADAMS,对麦弗逊悬架进行运动仿真分析,模拟在车轮上下跳动的运动激励下,测定出麦弗逊悬架的定位参数特性曲线,并对其做一个简单的分析。
关键词:麦弗逊悬架;运动学仿真;CATIA;车轮定位参数AbstractThe suspension is one of the most vital components of a vehicle. The kinematics characteristic is directly related to handing and stability, and use performance of the automobile. And the study of suspension kinematics is one of the most important subjects of research of vehicle design.The paper describes the current research status of the kinematics of automotive suspension system, through the specific classification and analysis of the automotive independent suspension system, Macpherson suspension system was chosen to be analyzed, through the analysis of the structure, arrangement and dynamic characteristics of the Macpherson suspension, a virtual prototype model was accomplished by the assembly design of the 3D models of this suspension system, by using the software ADAM. In the end, the Macpherson suspension is analyzed by multi-body system dynamics software ASAMS. The Macpherson suspension mechanism was driven by the up and down movement of the wheel, the determination of the positional parameter characteristic of the McPherson suspension, and making a simple analysis.Keywords: McPherson suspension; kinematics simulation; CATIA; wheel alignment parameters目录V1 绪论 .....................................................................................................................................11.1 悬架的概述 ................................................................................................................11.2 悬架的结构 ................................................................................................................1.2.1 弹性元件 ..........................................................................................................231.2.2 减振器 ..............................................................................................................41.2.3 导向机构 ..........................................................................................................41.3 国内外悬架发展趋势 ................................................................................................62 麦弗逊悬架概况 ..................................................................................................................62.1 麦弗逊悬架简介 ........................................................................................................62.1.1 麦弗逊悬架发展史 ..........................................................................................62.2 麦弗逊悬架结构特点 ................................................................................................72.2.1 麦弗逊悬架的优缺点 ......................................................................................2.3 麦弗逊悬架的研究现状和实际应用 (8)2.3.1 研究现状 ..........................................................................................................882.3.2 实际应用 ..........................................................................................................93 麦弗逊悬架模型的建立 ......................................................................................................93.1 CATIAV5R17软件简介 ............................................................................................93.2 建模思路 ....................................................................................................................3.3减震器和螺旋弹簧模型的建立 (10)103.3.1 减震器模型的建立 ........................................................................................3.3.2 螺旋弹簧模型的建立 (11)133.4 A型架模型的建立 ..................................................................................................153.5 轮毂和轮胎三维模型的建立 ..................................................................................153.5.1 轮毂模型的建立 ............................................................................................173.5.2 轮胎三维模型的建立 ....................................................................................3.6 横向稳定杆及连接杆模型的建立 (18)3.6.1 横向稳定杆模型的建立 (18)213.6.2 连接杆 ............................................................................................................223.7 转向机构模型的建立 ..............................................................................................223.7.1 转向盘模型的建立 ........................................................................................3.7.2 转向轴及转向万向节模型的建立 (24)3.7.3 转向器总成模型的建立 (26)293.8 悬架其它零部件的三维模型 ..................................................................................303.9 零部件的装配设计 ..................................................................................................31 4 麦弗逊悬架的运动分析 ....................................................................................................4.1ADAMDS和SimDesigner软件简介 (31)4.1.1 ADAMS软件简介 (31)314.1.2 SimDesigner软件简介 ..................................................................................4.2 悬架模型的输出过程 ..............................................................................................324.3 导入ADAMS及仿真过程 (33)35 5 悬架的运动分析 ................................................................................................................5.1 车轮定位参数变化曲线的测定 (35)5.1.1 车轮定位及定位参数的定义 (35)5.1.2 主线内倾角变化曲线的测定 (35)5.1.3 主销后倾角变化曲线的测定 (36)5.1.4 前轮外倾角变化曲线的测定 (37)5.1.5 前轮前束变化曲线的测定 (38)5.2 车轮侧向及纵向位移变化曲线的测定 (39)5.2.1 车轮侧向位移变化曲线的测定 (39)5.2.2 车轮纵向位移变化曲线的测定 (40)5.3 前悬架特征曲线的测定及分析 (41)5.3.1 主销内倾角与车轮跳动量变化曲线的分析 (42)5.3.2 主销后倾角与车轮跳动量变化曲线的分析 (43)5.3.3 车轮外倾角与车轮跳动量变化曲线的分析 (43)5.3.4 车轮前束角与车轮跳动量变化曲线的分析 (44)5.3.5 轮距的变化量与车轮跳动量变化曲线的分析 (44)6 总结 ....................................................................................................................................4647 致谢 ..........................................................................................................................................参考文献 ..................................................................................................................................4849 附录A ......................................................................................................................................55 附录B ......................................................................................................................................1 绪论1.1 悬架的概述悬架是车架(或承载式车身)与车桥(或车轮)之间的一切传力连接装置的总称。
166基于ADAMS的双横臂独⽴悬架的仿真汽车悬架是车⾝和车轮之间的⼀切传⼒连接装置的总称,它把路⾯作⽤于车轮的⽀承⼒、牵引⼒、制动⼒和侧向⼒以及这些⼒所产⽣的⼒矩传递到车⾝上,以保证汽车的正常⾏驶。
悬架系统是汽车重要的组成部分,汽车悬架系统的性能是影响汽车⾏驶平顺性、操纵稳定性和安全性的重要因素。
由于汽车前悬架部件之间运动关系复杂,⼀般都设计成主销内倾和后倾,并且控制臂轴也⼤多倾斜布置,这些都给悬架的运动学、动⼒学分析带来很⼤困难。
随着计算机技术不断提⾼,国外研制了很多专门⽤于机械构件运动的专⽤软件,ADAMS软件就是其中之⼀。
本⽂以某型汽车不等长双横臂式前独⽴悬架为例进⾏仿真计算和优化分析,从⽽解决该车型汽车悬架存在的问题。
1ADAMS软件介绍ADAMS软件使⽤交互式图形环境和零件库、约束库、⼒库,创建完全参数化的机械系统⼏何模型,其求解器采⽤多刚体系统动⼒学理论中的拉格郎⽇⽅程⽅法,建⽴系统动⼒学⽅程,对虚拟机械系统进⾏静⼒学、运动学和动⼒学分析,输出位移、速度、加速度和反作⽤⼒曲线。
ADAMS软件的仿真可⽤于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及计算有限元的输⼊载荷等。
它是虚拟样机分析的应⽤软件,⽤户可以运⽤该软件⾮常⽅便地对虚拟机械系统进⾏静⼒学、运动学和动⼒学分析;⼜是虚拟样机分析开发⼯具,其开放性基于ADAMS的双横臂独⽴悬架的仿真分析及优化设计汪随风,刘竞⼀,邓⽇青(重庆交通⼤学,重庆400074)摘要:在现有的汽车前悬架数据的基础上,⽤ADAMS/VIEW模块建⽴悬架模型,并对模型进⾏仿真计算,研究分析汽车运动中悬架随车轮上下跳动时定位参数的变化规律,评价悬架数据合理性。
采⽤优化分析对悬架不合理数据进⾏优化,进⼀步改善悬架系统性能,以提⾼产品开发质量。
关键词:ADAMS;独⽴悬架;优化分析中图分类号:U463⽂献标识码:A⽂章编号:1008-5483(2007)02-0012-04SimulationandOptimizationofWishboneIndependentSuspensionBasedonADAMSWangSuifeng,LiuJingyi,DengRiqing(ChongqingJiaotongUniversity,Chongqing400074,China)Abstract:Basedontheparametersobtainedfromakindofcar,thesimulationmodelingforthefrontsuspensionwassetupwithADSAM/VIEW.Thesuspension’skingpinaxisandwheelorientationwereresearchedandanalysedasthewheelwasmoving.Theparameterswereoptimizedandanalyzedtoim-provetheperformanceofthefrontsuspensionsystemandthequalityoftheproduct.Keywords:ADAMS;independentsuspension;optimization收稿⽇期:2007-03-19作者简介:汪随风(1983-),男,安徽⾩阳⼈,硕⼠,从事汽车设计研究。
设计与研究Design and Research基于ADAMS的双横臂悬架系统仿真ADAMS double wishbone suspension system simulation based on赵 妞(金肯职业技术学院 汽车与机械工程系)摘 要:本文运用ADAMS/Car对双横臂独立悬架进行建模并仿真,在观察悬架运 动过程中,初步验证了运用ADAMS/Car进行汽车悬架建模仿真的合理性,从而为悬架的设计提供了一种新的可行性方案。
关键词:车辆工程 双横臂悬架 仿真中图分类号:U463.33Abstract: in this paper, using ADAMS/Car modeling and Simulation of the double wishbone independent suspension, in the observation of suspension movement process, preliminaryvalidate the rationality of the use of ADAMS/Car vehicle suspension system modeling andsimulation, which provides a new feasible scheme for suspension design.Keywords: vehicle engineering double wishbone suspension simulation1 ADAMS/Car简介及双横臂悬架系统的结构分析A D A M S/C a r模块分为S t a n d a r d(标准)和Template Builder(模板建模器)两种模式,并对应不同的菜单界面功能。
其中,标准模式是以模板为基础对已存在的半车模型和整车模型进行仿真分析。
双横臂式独立悬架的两个摆臂长度可以相等,也可以不等,按上下摆臂是否相等,可以分为等长双横臂式和不等长双横臂式两种。
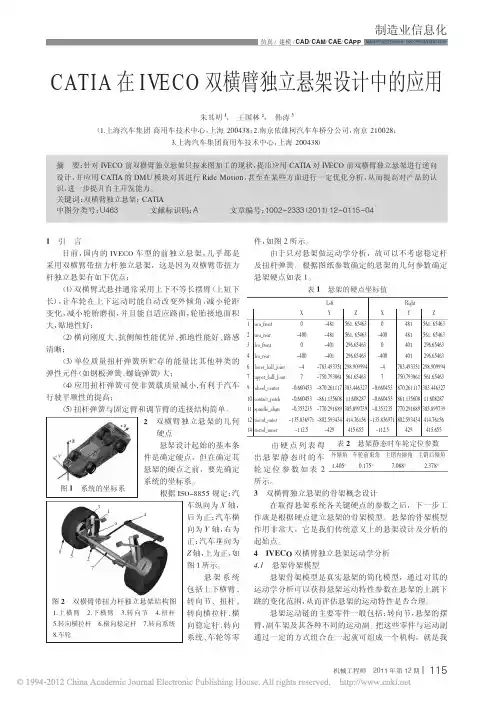
1 CATIA dmu模块分析双横臂独立前悬架基础知识使用dmu模块,对初学者而言,关键问题是熟悉dmu模块的各种操作;对于高级使用者而言,其关键在于分析机构是如何运动的。
这里简介CATIA dmu模块中所需要的基本操作。
表1-1运动副类型图标操作是否加驱动旋转副 1.先点击图标2.先后点击两个零件选择的旋转轴线,如果是回转体零件,则catia可自动生成轴线;否则需要自己手动画一条直线3.先后点击分属两个零件参考平面可加角度驱动球铰 1.先点击图标2.先后点击两个零件球铰铰接点万向节 1.先点击图标2.先后点击两条轴线,如果是回转体零件,则catia可自动生成轴线;否则需要自己手动画一条直线3.选择旋转形式,如绕第二根轴线转动移动副 1.先点击图标2.先后点击分属两个零件的两条直线,作为运动方向3.先后点击分属两个零件的两个平面,作为运动平面可加直线驱动点面副 1.先点击图标2.先后选择分属不同零件的面和点,要求点在面上,有的书中现在assemble design中装配,其实不必要,只要点的空间位置在面上即可。
可加固定 1.先点击图片2.选择你要固定的零件个人感觉,catia dmu建立运动副,易于理解的想法就是,用几何元素固定这个运动形式,使两个相互运动的零件具有固定的运动形式,例如创建简单的移动副,要确定两个零件之间有个平移运动,那么需要知道两个零件的运动方向,而分属两个零件的两条直线(其实就是向量)就可以确定两个零件的运动方向了;然后,还需要知道零件在哪个平面内运动,这就需要分属两个零件的不同的参考面,这个面决定了零件的运动平面。
2 双横臂独立前悬架参数化建模CATIA是著名的三维实体造型软件,其模块多是基于实体模型的。
但是线框模型也可在CA TIA的一些模块中进行分析仿真,比如运动分析模块dmu,显而易见的是,线框模块相对于实体模型所占的资源要小很多。
本次仿真,采用线框模型+实体模型的造型方案,即除轮胎外全部使用线框模型,但因要分析轮胎实际占用空间,故轮胎采用实体模型。
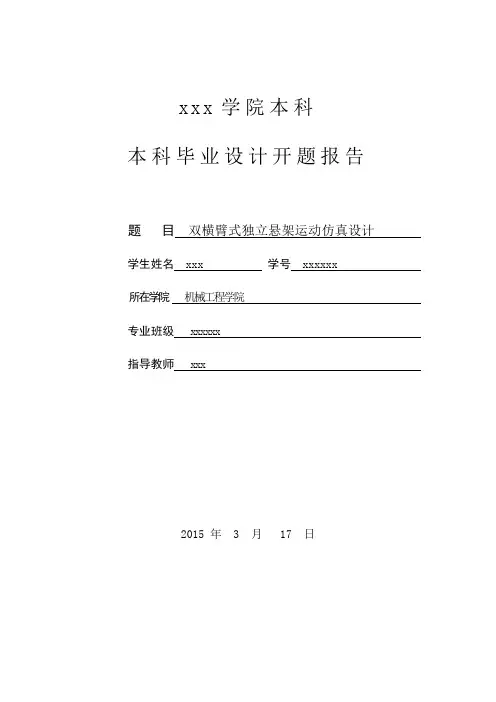
模型结构如图2.1所示。
图2.1 双横臂独立前悬架结构将图2.1左图的实物结构部分线框后如图2.1右图所示。
模型由6个零件(对应于catia 的part design模块)组成,主要2.1左图只是标出其中的5个,基座6(实际结构是副车架)并没有标出。
零件1为下横臂,零件2为上横臂,零件3为转向节+轮胎,零件4为横向拉杆,零件5为测试平台,其作用为轮胎可在测试平台内自由运动,并且测试平台上下运动模拟路面颠簸情况。
注意三点:1.在catia中,一个part design中所画出的零件,即使在空间结构上不相连,catia依然将其作为一个零件进行分析。
2.线框模型中两个点可以创建一条直线,三个点或者两条直线决定一个平面,这是基本的几何知识。
3.一般而言,catia采用的是由下到上的设计思路,即,在part design模块中设计零件,然后导入到assemble design中进行装配(如果你不知道part design和assemble design,那么好,那么请随便找一本catia入门的书,先看看....囧...)。
其实,在本次仿真中,我们也可以使用这个思路,但是不同的part design中设计的零件,都有其各自的坐标原点,大家懂得,凡是跟装配有关的设计,要是导入初始空间位置不能和你最后装配的位置重合的话,肯定是要用刷新按钮的,刷新之后,一个零件将会移动靠近另外一个零件,谁靠近谁跟你先后点击的次序有关,先点的零件靠近后点的零件,这很讨厌!换一个角度出发,若是首选在assemble design中创建一个product产品,然后在产品中添加零件,那么就可以通过选择使用同一坐标系创建零件,这样你的零件即使在没有约束的情况下,也可以看上去是一个整体!当然世界上没有样样都好的事情,这样做的坏处就是你添加各种约束、运动副的时候,可能要不断的隐藏/显示零件。
如果,你看不懂这一段,没有关系,按照后面说的做,做完之后,你就明白这一段话的意思了,OK?2.1 在product中创建part1:下横臂文件/新建,然后在新建对话框中选择product,常规操作。
Catia的特点是什么?对,是特征树,大家都知道的...如果你不知道...那么请你随便找一本catia的入门教程看看。
好了现在右击特征树/部件/新建零件,如图2.2所示。
这里强调一下,新建第一个零件的时候,catia不会问你是不是不改变坐标系,但是,当你第二次右击特征树/部件/新建零件时,会出现图2.3所示的对话框,这时候记得选“否”。
图2.2 图2.3Part1下横臂是一个三角架结构,两个点以转动副的形式铰接在车架上,另一个点是一个球铰,与part3转向节铰接,这就是part1的结构,那么好,单纯的建立这个零件,我们需要的是3个点和三条直线(为什么不直接话直线呢?大家懂得,cad软件中无一例外的都是先建立两个点然后再由这两个点组成一条直线,这里也是一样的,另外,按照第一节所述,球铰需要一个点的做转动中心以确定这个运动,这是为什么需要先建立点的原因)。
这就够了么?这是不够的,第一节已经说了,一个旋转副需要参与旋转的每一个零件提供一条转轴和一个平面,在我们的模型中,这条轴线与这个平得是垂直的,其实直线与平面不垂直的话,也能成功建立旋转副,但是这个不好控制了,还是垂直吧,易于理解.....那么又出来一个平面,一个平面如果这个平面不是特殊平面(平行于三个坐标平面)那么创建这个平面需要3个点,几何基础知识嘛,那么好,其实,我们这个Part1下横臂需要创建6个点,见表2.1。
表2.1名称重合点作用坐标part1-1 part6-1 这两点连线是下横臂转动轴线,与基座组成旋转副(307,1560,383)part1-2 part6-2 (307,1285,388)part1-3 part3-1 与转向节球铰接点(686,1414,364)part1-4 part1-1 决定创建旋转副需要的平面(307,1560,383)part1-5 part6-3 (307,1565,658)part1-6 part6-4 (407,1560,383)1-1(1-4)与1-5,1-6三点组成旋转副所需的平面,创建平面/三点/依次点选三点,基本操作,不解释额,大家发现了,其实part-1和part-4点是同一个点,那么现在就不需要建立6个点了,5个就够了。
另外,红色的点是需要自己计算的,怎么计算?....不会的话,去看解析几何..那么第一个零件就建好了,见图2.4图2.42.2 建立其余5个线框零件按照上面说的方法,分别建立别的零件,见表,各种表,这里就不截图了,依然是红色的代表自己计算的坐标点。
表2.2 part2上横臂2-1(2-4)与2-5,2-6三点组成旋转副所需的平面,创建平面/三点/依次点选三点,基本操作,不解释依然是三点中每两点连线,组成三角形的零件代表上横臂。
表2.3 part3 转向节+轮胎创建实体零件轮胎:选择yoz面,进入草绘器,做圆,圆心(1442,507),半径300;拉伸选择双面拉伸,两个量分别为673和-813;给轮胎倒角,选择45°长度30。
基本操作,不解释转向节中心点3-5,分别与3-1,3-2,3-3,3-5四点相连成四条直线加上代表轮胎的拉伸实体,代表零件4,其实这里用组件4这个名称更合适。
表2.4 part4 横向拉杆两点连线,代表横向拉杆,同时这也是万向节的一条选择轴线。
表2.5 part5 测试平台这里创建移动副需要的平面,但是由5-1,5-2组成的直线垂直于xoy平面,所以可以直接使用yoz(或者xoz)平面做创建移动副需要的平面创建测试平台实体零件,选择xoy平面,进入草绘器,创建圆(743,1442),拉伸,双向拉伸,拉伸量分别为187和-207,基本操作,不解释5-1和5-2点连线代表移动副的移动反向,加上拉伸的圆柱实体(代表测试平台),组成零件5。
表2.6 part 6基座part6-10 与6-9组成万向节旋转轴线(390,1311,471)part6-10 part5-1 组成测试平台与基座的移动副(743,1442,207)part6-10 part2-2 (743,1442,157)6-1与6-2,6-3三点组成下横臂旋转副所需的平面,创建平面/三点/依次点选三点,基本操作,不解释6-4与6-5,6-6三点组成上横臂旋转副所需的平面,创建平面/三点/依次点选三点,基本操作,不解释直接使用yoz(或者xoz)平面做创建基座与测试平台移动副需要的平面3 创建双横臂独立悬架的运动副本次仿真创建的双横臂独立悬架的运动副见表3-1。
表3-1运动副类型图标零件1 零件2 是否加驱动旋转副基座下横臂否旋转副基座上横臂否球铰转向节下横臂否球铰转向节上横臂否球铰转向节横向拉杆否万向节基座横向拉杆否移动副测试平台基座是点面副转向节(轮胎)测试平台否固定基座这里说明几点1.所有的创建运动副的命令都在一个叫“DMU运动机构”工具栏,不知道怎么找工具栏的果断查找catiia入门书籍!2.创建运动副的时候,catia会提示对话框如图3.1,对此进行简单说明。
图3.13.坦白说,其实catia中运动副的建立相当的简单,这是就不详细说明了,你完全根据提示来就是了,其具体操作无非就是不停的选择点、线和面,具体操作见表1-1,实在不行的话,就创建一个连杆,自己试试就知道怎么建立了,这里只举例说明怎么建立旋转副,见图3.2。
图3.24.catia在创建运动副的同时,自动给零件之间添加了约束,见图3.3。
图3.35.这些东西都做好以后,固定基座,操作很简单,点击图标,然后点击零件6就可以了,这时候出现图3.4,说明你的机构可以运动了,然后点击这个图标,在“DMU 一般图画”工具栏上,出现图3.5,选择“机械装置1”点击“确定”,出现图3.6,就可以运动了。
图3.4图3.5图3.64 获得轮胎包络我们这次仿真的目的是活动轮胎包络,操作与结果见图5。
图5。